
Anisotropic Median Filtering for Stereo Disparity Map Refinement
Nils Einecke and Julian Eggert
Honda Research Institute Europe GmbH, Carl-Legien-Strasse 30, 63073 Offenbach/Main, Germany
Keywords:
Stereo Vision, Refinement, Anisotropic Filter.
Abstract:
In this paper we present a novel method for refining stereo disparity maps that is inspired by both simple me-
dian filtering and edge-preserving anisotropic filtering. We argue that a combination of these two techniques
is particularly effective for reducing the fattening effect that typically occurs for block-matching stereo algo-
rithms. Experiments show that the newly proposed post-refinement can propel simple patch-based algorithms
to much higher ranks in the Middlebury stereo benchmark. Furthermore, a comparison to state-of-the-art meth-
ods for disparity refinement shows a similar accuracy improvement but at only a fraction of the computational
effort. Hence, this approach can be used in systems with restricted computational power.
1 INTRODUCTION
Despite many years of research stereoscopic depth es-
timation is still one of the most active fields in com-
puter vision. However, the research is often gov-
erned by the goal to find ever more accurate algo-
rithms without taking much regard to computational
efficiency or algorithmic complexity. Because of this
trend the developed methods are often not applicable
in mobile
1
systems due to the restrictions in hardware
and energy consumption such systems imply.
The main steps of a stereo algorithm (Scharstein
and Szeliski, 2002) are matching cost computation,
matching cost aggregation, disparity calculation and
disparity refinement. Today, mobile robotic systems
typically use block-matching with summed abso-
lute difference (SAD), normalized cross-correlation
(NCC) or census for the cost computation and extract
the disparities by means of a simple winner-takes-all
(WTA) mechanism. The cost aggregation step is ei-
ther skipped or part of the actual cost like SAD while
the disparity refinement usually reduces to a left-right
consistency check, sometimes paired with a simple
sub-pixel disparity interpolation. In contrast, high
ranked algorithms are characterized by sophisticated
cost aggregation and disparity refinement techniques
that have runtimes of several seconds and often need
to store and work on the full cost volume which is
inappropriate for mobile systems.
In this paper, we take steps towards disparity map
1
Here mobile system refers mainly to autonomous
robotic systems.
refinements whose memory and space complexity is
comparable to block-matching stereo so that it can
be used in combination. One prominent disadvan-
tage of block-matching is the so called ”fattening ef-
fect” which describes the tendency of block-matching
to lead to a spatial smoothing of disparity values. In
particular, the fattening effect causes an imprecise lo-
cation of depth discontinuities. The idea of the post-
processing we present here is to reduce the fattening
effect by employing an anisotropic median filtering.
In contrast to a typical median filter, the proposed fil-
ter takes the local photometric structure of the scene
into account.
2 RELATED WORK
According to (Scharstein and Szeliski, 2002) dispar-
ity map refinement is the last major step of a stereo-
scopic depth estimation and comes in several flavors.
On the one hand, there are means for detecting and
removing outliers. Arguably, the most often used
technique is a left-right consistency check as for ex-
ample introduced in (Fua, 1993). By calculating a
stereo map for the left as well as for the right stereo
image, inconsistencies in the disparity values are de-
tected and removed. Furthermore, for local stereo al-
gorithms it has been proposed in (Fua, 1993) to seg-
ment a disparity into regions of constant disparity and
then to remove small regions as these are likely to be
outliers.
Another typical refinement is to increase the reso-
189
Einecke N. and Eggert J..
Anisotropic Median Filtering for Stereo Disparity Map Refinement.
DOI: 10.5220/0004200401890198
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 189-198
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

lution of the disparities by sub-pixel refinement. This
can for example be done by fitting a curve to the
matching cost (Fua, 1993; Matthies et al., 1989) or
by iterative gradient descent techniques (Lucas and
Kanade, 1981; Tian and Huhns, 1986). In general
these methods allow for an increase of the depth res-
olution with little extra computational cost. In (Yang
et al., 2007) Yang et al. present an iterative refinement
for low-resolution depth images. They show that by
using a bilateral filtering and sub-pixel interpolation
one can achieve a reliable up-scaling of the disparity
maps of up to three scales.
Besides the refinement techniques mentioned
above, there are methods for improving disparity
maps by imposing additional consistency constraints
to the disparity or depth maps. For example Sun et al.
(Sun et al., 2011) refine disparity maps by propagat-
ing disparity values along line segments. These seg-
ments are constructed such that they contain pixels of
similar color. Within the segments reliable seed pix-
els are extracted whose disparity values are then prop-
agated within the line segment. As the line segments
contain pixels of similar color, the propagation en-
forces a smoothness constraint on the resulting map.
In order to prevent streaking artifacts the refinement is
completed with a voting scheme in vertical line seg-
ments and a bilateral filtering with a small filter size.
One drawback of the seed pixel propagation is that
a lot of valuable information is thrown away since
only the disparity values of the seed pixels are used
to calculate the refined map. A different way is to en-
force the smoothness by means of anisotropic image
processing. The basic idea is to improve a pixel’s dis-
parity by considering all neighboring pixels weighted
with their similarity. One way to achieve this is to
apply anisotropic diffusion (Perona and Malik, 1990)
to the disparity maps. Banno and Ikeuchi (Banno
and Ikeuchi, 2009) showed that good results can be
achieved by setting the diffusion coefficients depen-
dent on color similarity and label confidence.
One interesting variant of anisotropic post-
processing is the local consistent LC stereo method
(Mattoccia, 2009). In LC the mutual relationship
of neighboring pixels is modeled explicitly. This is
done in a probabilistic fashion via pixel based func-
tions that measure color and spatial proximity. Given
these measures all disparity hypotheses of a point pair
are evaluated for plausibility. The final disparity of a
pixel is computed by accumulating the plausibilities
within the corresponding image patch. Since the ac-
cumulated plausibilities depend on absolute and rela-
tive positions the LC approach constitutes also a sort
of anisotropic processing. However, in contrast to the
anisotropic diffusion there is no iterative processing,
which makes this approach much faster.
It is important to note here, that anisotropic pro-
cessing is not only restricted to the post-processing of
disparity maps. A similar idea is also frequently used
for cost aggregation by means of adaptively weighted
filters (Yoon and Kweon, 2006; Heo et al., 2008).
However,as such filters are non-separable they lead to
a high computational costs. Even fast approximations
need several seconds for standard disparity computa-
tions which prevents a reasonable application in mo-
bile systems so far. Although anisotropic filters used
for post-processing share the same problem of non-
separability they have a runtime that is independent
of the disparity search range because they are applied
to the final disparity map.
Another advantage of working directly on the dis-
parity maps is that this does not require informa-
tion from the cost volume which dramatically reduces
the memory footprint. This is in contrast to tech-
niques of the disparity optimization step that precedes
the disparity refinement step. Prominent examples
for disparity optimization are dynamic programming
(Scharstein and Szeliski, 2002; Wang et al., 2006) or
scanline optimization (Scharstein and Szeliski, 2002;
Hirschm¨uller, 2005). These techniques require at
least some part of the cost volume at one time. Due to
this, these methods are less suited for the restricted
hardware in mobile systems. Here the anisotropic
post-processing in conjunction with a local method in
the disparity optimization step is more favorable.
An approach similar in spirit compared to our
anisotropic median idea is the incorporation of an
approximation of a local median filter into the en-
ergy minimization of optical flow methods (Sun et al.,
2010). By using the relationship between median and
L1 norm the energy minimization can be extended by
an additional penalty term that implicitly enforces the
effect of a subsequent median filter. In order to pre-
vent the suppression of fine structures the L1 norm is
weighted in accordance to the pixel similarity. Un-
fortunately, this approach is tailored for minimizing
an energy function and, thus, incompatible with the
fast block-matching methods with WTA characteris-
tic that we target here.
3 ANISOTROPIC MEDIAN
FILTERING
The main drawback of current anisotropic post-
processing techniques is that they are still too com-
putationally expensive for mobile systems. It has
been shown (Mattoccia, 2010) for LC, that a more
coarse grained processing leads to a substantial speed-
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
190

(a) Venus (b) Ground Truth (c) NCC Stereo
Figure 1: Visualization of the foreground fattening effect of block-matching stereo. (a) Venus image of the Middlebury
benchmark and (b) the corresponding ground truth disparity map. (c) Disparity map calculated by means of block-matching
stereo with NCC measure. The white lines in all three images visualize the discontinuities of the ground truth disparity. As
can be seen in (c) the foreground disparities are smeared over background disparities.
up, bringing the computational time on a standalone
PC down to a few seconds while having only little
or no degradation in accuracy. However, compared
to the few hundreds of milliseconds it takes to com-
pute a disparity map with a block-matching stereo
method the anisotropic post-processing would govern
the overall computational cost.
As has been discussed above, one major issue of
block-matching stereo is the fattening effect at depth
discontinuities which in most cases is a foreground
fattening, i.e. foreground disparities suppress back-
ground disparities. To tackle this problem, we pro-
pose an anisotropic technique called anisotropic me-
dian filtering that is specifically tailored for reducing
the fattening effect. Since median filtering is based on
the well analyzed select problem, efficient algorithms
for computing the median already exist. These algo-
rithms can also be used for the anisotropic median for
a fast processing.
Before coming to the algorithmic details let’s have
a look at a typical foreground fattening in Fig 1. This
figure shows the Venus scene from the Middlebury
benchmark (Scharstein and Szeliski, 2002) together
with the ground truth disparity map and a disparity
map computed by block-matching stereo with NCC.
The ground truth disparity discontinuities are visu-
alized via white lines. It can be observed in the
block-matching disparity map that foreground dispar-
ities are strongly smeared over background disparities
leading to a displacement of the disparity discontinu-
ities.
Here our basic idea is to find a way to replace
disparities that are inconsistent within their neigh-
borhood with a new value that is in accordance to
the neighboring values. There are two problems that
arise. First, how to define neighborhoods and, sec-
ond, how to extract a better disparity value from it.
For the latter problem a median filter seems to be
a good choice because it replaces statistical outliers
with robust values. In disparity map refinement steps,
median filters are typically used to remove peak-like
outliers by considering a small rectangular neighbor-
hoods around each pixel. Let N( f) be the set of neigh-
borhood pixels of a pixel f. Then the disparity d( f)
of f is replaced by
d( f) = φ(D(f ), ⌈
n
2
⌉) , (1)
where D( f) is the list of all disparities in N( f), n =
|N( f)| and φ(L, k) returns the k-th largest element of
list L. Please note that we do not use the statistical
definition of the median which would involve an av-
eraging of two values in case of an even number of
elements. Instead, we use the typical convention in
image processing and computational theory that the
median is always the lower median.
Although this reliably removes outliers it leaves
fattened areas mainly untouched. The reason is that
the neighborhood of a pixel near a depth discontinu-
ity is likely to be populated with roughly the same
amount of pixels from the foreground and the back-
ground. This brings us back to the first problem,
namely, how to define the neighborhood. It is im-
portant that the pixels of the neighborhood show con-
sistent disparity values. Inspired by anisotropic post-
processing techniques (Banno and Ikeuchi, 2009;
Mattoccia, 2009) we define the neighborhoodN(f) of
a pixel f in correspondence with the spatial proximity
and the color similarity to the surrounding pixels
N( f) = {p | ∆
s
( f, p) < θ
s
∧ ∆
c
( f, p) < θ
c
} . (2)
The underlying idea is that pixels which belong to a
common surface are likely to have a similar appear-
ance.
For the color similarity we use a simple Euclidean
distance measure
∆
c
( f, p) =
∑
a∈{R,G,B}
(I
a
( f) − I
a
(p))
2
. (3)
AnisotropicMedianFilteringforStereoDisparityMapRefinement
191
median
anisotropic
median
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1 1 1 1 11 1 1 1 11 1 1 1 1
0 0 0 00 0 0 00 0
111 1 1
0 0 0 00 0 0 00 0
new disparity of center pixel
center pixel
filter window
111 1 1
0 0 0 00 0 0 00 0
anisotropic
filter
0.33
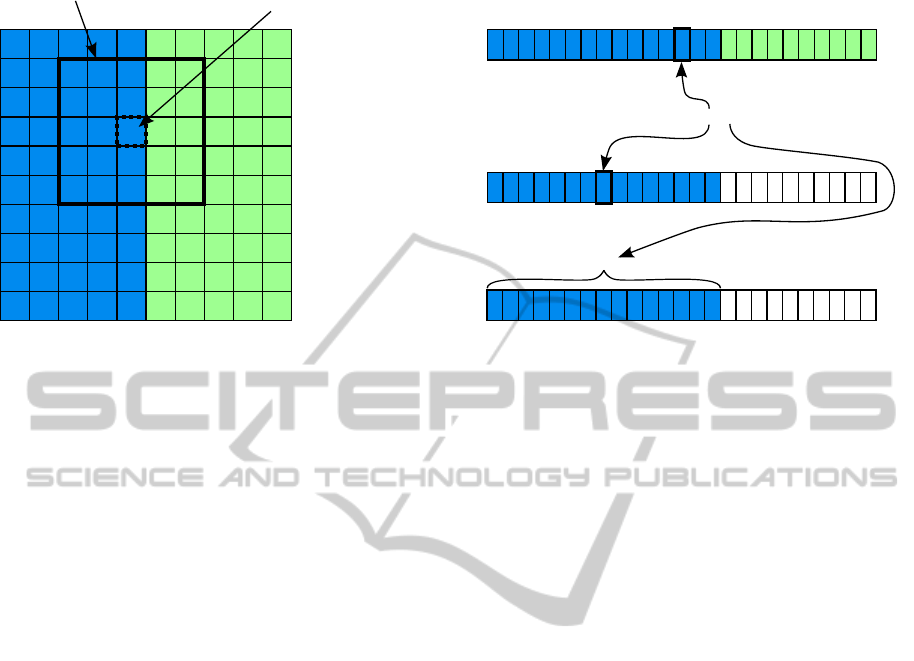
Figure 2: Anisotropic Median Filter: On the left side a simplified depth map is displayed. The numbers represent the estimated
disparity and the colors indicate the pixel color. Blue pixels are background pixels and green pixels are foreground pixels with
a ground truth of disparity of ”0” and ”1”, respectively. As a consequence blue pixels with a disparity of ”1” are wrongly
estimated due to the fattening effect. The right side shows the working principle of a median filter, a simple anisotropic
(weighted) average filter and the anisotropic median filter for the thick filter window on the left. While the median would
replace the dotted center pixel with ”1”, the anisotropic median correctly replaces the center pixel disparity with ”0”. The
reason is that it takes only pixels into account that are similar to the center pixel (blue). Although a standard anisotropic
averaging filter also considers pixel similarity, it fails of returning the correct value of ”0” because it employs no means of
detecting outliers in the disparity values. Thus the filter result of ”0.33” is contaminated by the outlier values ”1” of the blue
background pixels.
However, for the spatial proximity ∆
s
(x, p) we rather
apply the Manhattan distance as this can be realized
more efficiently than the Euclidean distance on a pixel
grid
∆
s
( f, p) =
∑
a∈{x,y}
| f
a
− p
a
| . (4)
Indeed using the Manhattan distance for spatial prox-
imity corresponds to defining a squared image patch
around a center pixel f. Hence, we will skip ∆
s
( f, p)
in the following and rather just refer to the size of the
filter window from which the neighborhood N( f) is
extracted.
Figure 2 displays a simplified example for visu-
alizing the working principle of the anisotropic me-
dian filter in comparison to a plain median filter and a
simple anisotropic averaging filter. The simple exam-
ple consists of blue background and green foreground
pixels with a ground truth disparity of ”0” and ”1”,
respectively. Some of the blue pixels, however, have
been assigned a disparity ”1” by the stereo algorithm
(fattening effect). By applying a plain median filter
the wrong disparities are not removed because they
have enough support in the filter window. In con-
trast, the anisotropic median filter considers only pix-
els in the filter window that have a color similar to
the center pixel (blue dotted pixel in Fig. 2). Thus the
wrong disparity ”1” has much less support and the
anisotropic median replaces the center pixel’s dispar-
ity by ”0”. In comparison to this a standard averaging
anisotropic filter will fail as depicted at the bottom
of Fig. 2. Since all blue pixels get the same weight
the outlier pixels contaminate the filter result. This is
a typical problem of anisotropic filters, i.e. disparity
outliers are not considered.
4 COMPUTATIONAL
CONSIDERATIONS
For maps or images which have only a small inte-
ger range the plain median filter can be calculated
efficiently and quasi independently of the filter size
(Perreault and H´ebert, 2007). Unfortunately, this can-
not be applied to the anisotropic median filter for dis-
parity refinement. The first reason is, that the quasi
size-independent runtime is realized via running his-
tograms. These, however, will get very large for sub-
pixel accurate disparity maps. A second but more se-
vere problem is that due to the anisotropic processing
the neighborhood N(p) of a pixel p cannot be com-
puted by taking the neighborhood N(p − 1) and up-
dating it for pixel p. Because of this the neighborhood
N(p) must be constructed for every pixel (p) indepen-
dently, which also means that the anisotropic median
cannot be calculated in a running filter fashion.
The na¨ıve approach for finding the median of a
list of n unsorted elements is to first sort the list and
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
192

outlier
removal
hole filling
anisotropic
median filter
calculate
disparity map
Figure 3: Processing pipeline for anisotropic median filtering. For an optimal result, first, outliers have to be removed. The
resulting holes are either filled by means of applying the anisotropic median exclusively to the holes or by linear interpolation.
Eventually, the anisotropic median is applied to the full disparity map. The white lines in the disparity maps below the flow
chart show the ground truth position of the main depth discontinuities.
then select the median entry. As the best runtime
for any sorting algorithm based on the comparison
of whole keys is bound by Ω(nlog(n)) the na¨ıve me-
dian is bound alike. A better way is to use quicks-
elect (Hoare, 1961). Although this has a worst case
runtime of O (n
2
) its average runtime is O (n). Since
we apply the anisotropic median on every pixel for
refining a disparity map, the high worst case runtime
has only very little effect. Altogether, applying the
anisotropic median to a whole disparity map has an
expected runtime of O ( ¯nm) with ¯n being the average
neighborhood size and m being the number of pixels
in the disparity map. This means that as long as ¯n is
comparable to the disparity search range d, the run-
time of the anisotropic median is comparable to the
runtime of block-matching stereo which typically has
a runtime of O (dm).
5 PROCESSING PIPELINE
In order to get the best performance of the anisotropic
median (AM) filter we combine it with means to re-
move outliers from the disparity map. If not re-
moved, outliers that populate the low-texture regions
can hamper the AM filter. The overall pipeline we
employ is depicted in Fig. 3. For outlier removal we
use a simple technique proposed in (Fua, 1993). The
idea is to remove small areas with constant disparity.
We extend this a bit by removing only those regions
whose disparities differ substantially from the sur-
rounding. It is of course possible to apply also other
techniques like a left-right consistency check (Fua,
1993). In general, it is best to apply such techniques
before the AM filtering. However, in most cases the
removal of the small erroneous areas is sufficient.
As a matter of fact, the outlier removal punches
holes into the disparity map. These holes would lead
to a positive bias in the evaluation, if AM would be
applied directly to the perforated disparity map. The
reason is that the hole pixels are marked with invalid
(negative) disparity values. Thus any estimation of a
real disparity value will be better as the invalid mark-
ing values which will of course reduce the overall dis-
parity error. In order to prevent this bias in the eval-
uation, we apply the AM filter first to the hole pixels
only and consider this as a hole filling post-processing
step whose resulting disparity map is used as base
line. Since the hole filling does not alter the other dis-
parity values, the disparity map after the hole filling
still contains the fattening errors (see Fig. 3).
After the hole filling step follows the actual AM
filter step. This is applied to the whole disparity map.
The difference between the disparity error after the
hole filling step and after the AM filter step is used for
evaluating our proposed AM filter in the following.
6 EXPERIMENTS
In this section, we assess the proposed anisotropic
median (AM) filter by using the Middlebury data set
(Scharstein and Szeliski, 2002). In the first experi-
ment, the effectivenessof AM as disparity map refine-
ment is evaluated for different block-matching stereo
approaches. We apply AM to block-matching with
sum of absolute difference (SAD) (Scharstein and
Szeliski, 2002), normalized cross-correlation (NCC)
(Scharstein and Szeliski, 2002), summed normalized
cross-correlation (SNCC) (Einecke and Eggert, 2010)
and rank and census transform (Zabih and Woodfill,
1994).
In the following evaluations, the color stereo im-
ages are always transformed to gray level images for
block-matching stereo. Furthermore, rank and cen-
sus require a certain image patch size for transform-
AnisotropicMedianFilteringforStereoDisparityMapRefinement
193
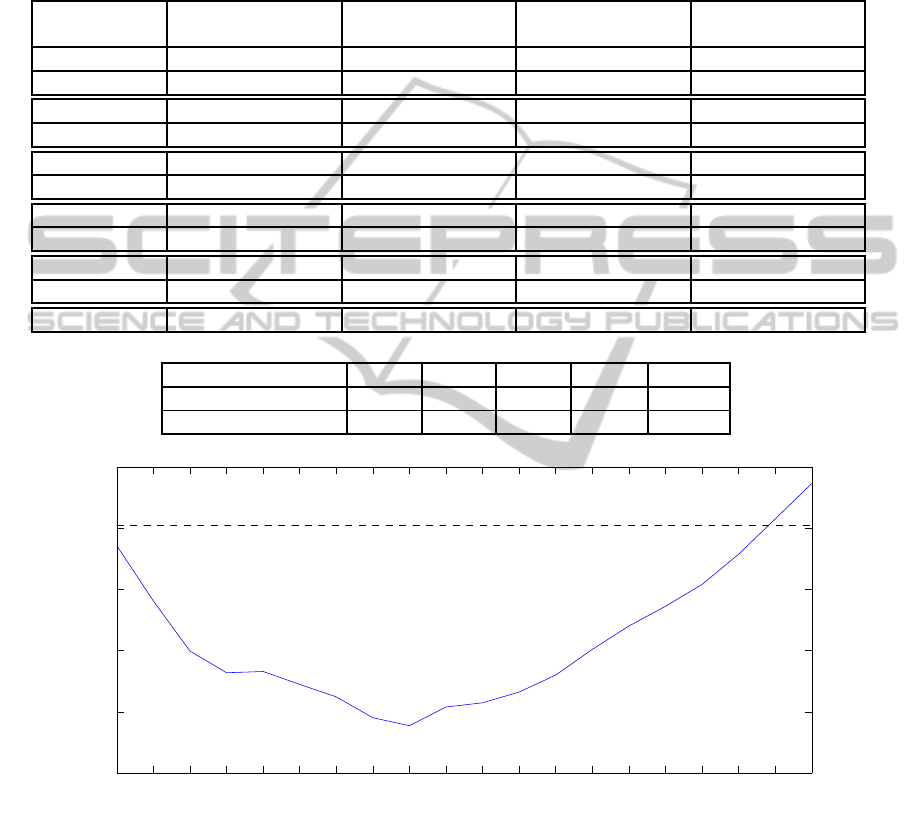
Table 1: Improvement of block-matching stereo by AM post-processing. The block-matching methods used are: sum of
absolute difference SAD (Scharstein and Szeliski, 2002), normalized cross-correlation NCC (Scharstein and Szeliski, 2002),
summed normalized cross-correlation SNCC (Einecke and Eggert, 2010) and rank and census transform (Zabih and Woodfill,
1994). The upper table compares the performance of the different methods after the hole filling step (”+ fill”) and after the
AM filter step (”+ AM”) (see also Fig. 3). The performance is measured by means of the percentage of bad pixels (Scharstein
and Szeliski, 2002) with a disparity error threshold of 0.5. As the results show, AM leads to an improvement in all cases.
Moreover, the average gain (average difference between the error of ”+ fill” and ”+ AM”) highlights that the improvement is
highest for regions of depth discontinuity. The lower table lists the parameters used for the different block-matching methods.
Tsukuba Venus Teddy Cones
Algorithm nocc all disc nocc all disc nocc all disc nocc all disc
SAD + fill 11.1 12.2 21.3 7.62 8.54 22.8 24.5 30.1 42.7 14.2 21.8 29.5
SAD + AM 8.95 9.61 17.9 3.26 3.73 9.99 21.2 27.0 37.4 10.8 18.0 22.9
RT + fill 10.9 11.8 25.0 4.18 5.13 17.4 13.8 20.8 34.3 7.89 16.0 21.7
RT + AM 9.4 9.9 21.9 1.75 2.32 9.91 12.7 19.8 30.3 7.63 15.1 19.3
NCC + fill 9.84 10.9 24.0 5.03 5.97 21.9 15.7 21.9 37.3 9.16 16.7 23.4
NCC + AM 8.44 9.13 19.5 1.75 2.26 10.2 12.8 18.9 31.3 6.45 13.6 17.7
SNCC + fill 10.3 11.2 21.4 3.44 4.28 14.9 12.3 18.5 30.6 6.11 13.7 16.8
SNCC + AM 9.23 9.89 19.2 1.65 2.08 8.56 11.1 17.2 27.3 5.58 12.8 15.1
Census + fill 11.0 11.7 21.1 3.75 4.61 15.8 12.3 18.7 30.7 6.31 14.0 17.4
Census + AM 9.14 9.60 18.9 1.70 2.18 9.08 11.1 17.2 27.4 6.11 13.2 15.9
average gain 1.60 1.75 3.08 2.78 3.19 9.01 1.94 1.98 4.38 1.42 1.90 3.58
Algorithm SAD RT NCC SNCC Census
block-matching size 7x7 7x7 5x5 5x5 5x5
AM filter size 21x21 21x21 15x15 17x17 19x19
3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41
10.5
11
11.5
12
12.5
13
AM filter size
bad pixels
Figure 4: This plot shows the performance (bad pixels percentage combined for all four Middlebury scenes) of AM with
respect to its filter size. The dashed line shows the performance of the census block-matching after the hole filling step. The
blue, solid line shows the performance after applying AM with different filter sizes. There are two things to notice. First, over
a large range of filter sizes the additional application of AM improves the results of the plain block-matching result. Second,
the best AM filter size of 19x19 pixels is not a strong peak in the error plot. This means that the selection of a good filter size
for AM is quite stable which is important for a good generalization.
ing the images. Here we use a patch size of 11x11 for
rank transform as proposed in (Einecke and Eggert,
2010) and 7x7 for census transform because this is
the largest odd-valued patch-size that can make use of
the fast 64-bit (Humenberger et al., 2010) processing.
Similarly, we always use a filter size of 3x3 for the
first stage of SNCC as proposed in (Einecke and Eg-
gert, 2010). Furthermore, all used block-matching ap-
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
194

proaches generate sub-pixel accurate disparity maps
by fitting quadratic curves into the matching cost.
For the outlier removal step, we apply a left-right
consistency check and the removal of homogeneous
outlier regions as proposed in (Fua, 1993). The ho-
mogeneous outlier regions are detected by means of
a simple but fast region grouping algorithm. Please
note that the parameters of the outlier removal are
fixed for all block-matching approaches and all ex-
periments.
As described in section 5, we first apply the AM
filter to the invalid hole pixels and consider this as a
hole filling pre-processing in order to prevent a pos-
itive bias in the evaluation of the performance of the
AM filter. The invalid hole pixels are marked in the
disparity map by negative disparity values. Therefore
the neighborhood set N( f) for a pixel f needs to be
adapted to consider only pixels with valid disparities
d(p) ≥ 0
N( f) = {p | ∆
s
( f, p) < θ
s
∧
∆
c
( f, p) < θ
c
∧
d(p) ≥ 0} , (5)
in order to ensure the consistency of the disparity list
D( f). In some cases this can result in very small
neighborhoods N( f) which could lead to wrong re-
sults due to an insufficient statistical significance. To
prevent this, we demand the neighborhood N( f) to
have at least a cardinality of nine. If it has a smaller
cardinality, the corresponding pixel f is not processed
by the median filtering, so that the pixel’s disparity is
still invalid. These few remaining hole are filled by a
simple linear interpolation.
After the disparity maps have been made dense,
the actual AM filter is applied in a single run to the
whole disparity map for refinement. The reduction in
disparity error by this final filter step is analyzed in
the following.
Table 1 shows the performance of five different
block-matching approaches right after the hole fill-
ing step and after the AM filter step of the process-
ing pipeline discussed in Fig. 3. As the different cost
functions have different optimal working parameters
we applied a brute-force optimization to find these
points in order to render the different results compara-
ble. The optimal parameters are shown at the bottom
of Table 1. The measure used in Table 1 is the per-
centage of bad pixels as proposed in (Scharstein and
Szeliski, 2002)
b
p
=
∑
f
|d( f) − GT( f)| > δ , (6)
where δ is the disparity error threshold, d( f) is the
disparity of pixel f and GT( f) its ground truth dis-
parity. In this evaluation we use a threshold of δ = 0.5
to see how well AM can cope with sub-pixel accurate
disparity maps. One might argue that the strong non-
linearity that a median selection involves, destroys the
sub-pixel accuracy of a disparity maps. However, the
results in Table 1 demonstrate that in all cases AM is
able to improve the performance of block-matching
stereo. Hence, it is well suited also for sub-pixel ac-
curate maps. It also strikes that in general the im-
provement for depth discontinuities (disc) is signifi-
cantly larger than for non-occluding regions (nocc) or
the full disparity map (all). This can best be seen in
the average gain which is the average (over all tested
block-matching approaches) error difference between
the filled disparity maps and the AM filtered dispar-
ity map (see also Fig. 3). The large improvement in
the ’disc’ areas confirms the basic idea behind AM of
reducing the fattening effect. On the other hand, the
improvement for regions without disparity disconti-
nuities reveals that AM surpasses its actual purpose
by providing means for a general disparity map im-
provement.
Figure 4 shows a plot of the disparity error for
different AM filter sizes applied to the results of the
census block-matching. For comparison the census
performance after the hole filling step is plotted as a
dashed line. The plot demonstrates two things. First,
over a large range of filter sizes AM improves the re-
sults of the plain census result. Second, the best AM
filter size is not a strong peak in the error plot. This
means that the selection of a good filter size for AM
is quite stable which is important for a good general-
ization.
In order to get a better grasp at the actual improve-
ment capabilities of AM, we compare it in a second
experiment to the local consistency (LC) approach be-
cause LC shares similar characteristics with AM and
it has already proven itself to be very effective. LC is
similar to AM in the following points: First, its pro-
cessing is constrained to local neighborhoods. Sec-
ond, it is non-iterative. Third, it is quite fast with a
runtime of only a few seconds on a standard PC and,
fourth, it has a very small memory footprint.
In this second comparative experiment we use
only SNCC block-matching because it showed the
best overall performance in Table 1 and can thus
be regarded as an upper bound for the other block-
matching approaches. For comparison we use the re-
sults of SNCC that have been reported in the original
paper (Einecke and Eggert, 2010). The authors of that
paper applied a similar outlier removal as we do but
filled the resulting holes with a depth-discontinuity-
aware linear interpolation. In order to be compara-
ble to (Einecke and Eggert, 2010) we also use a non-
square filter size of 9x5 for the second stage of the
AnisotropicMedianFilteringforStereoDisparityMapRefinement
195
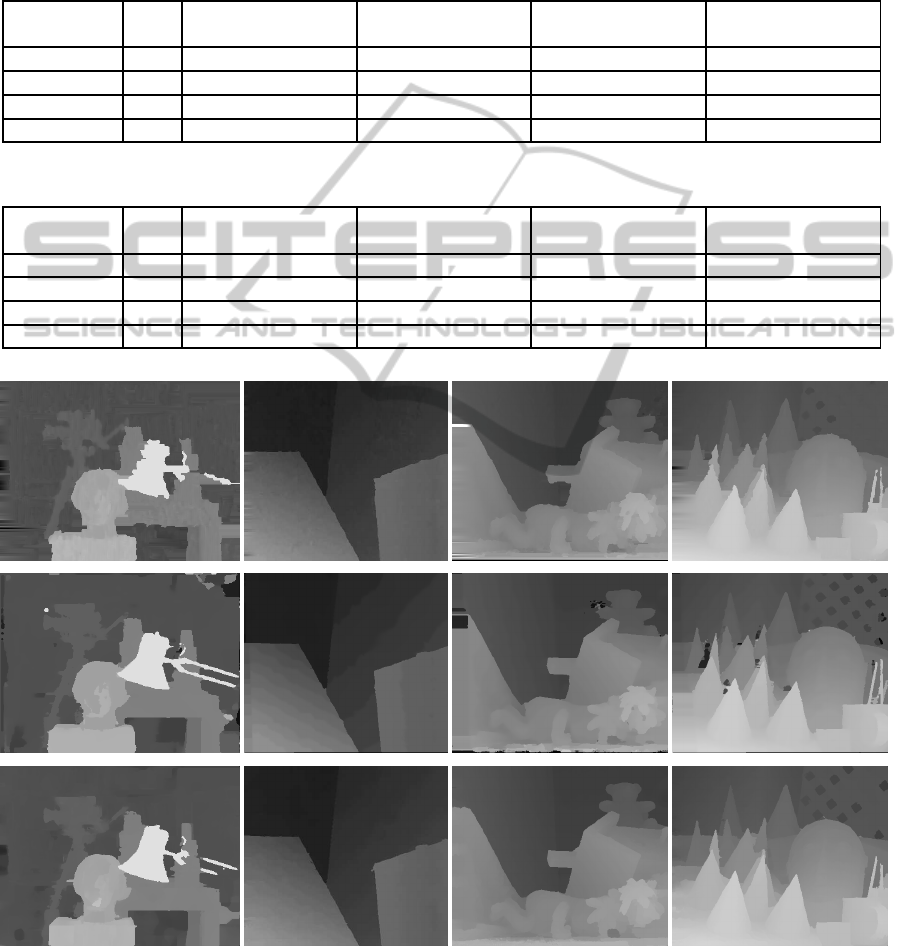
Table 2: Accuracy evaluation according to (Scharstein and Szeliski, 2002) where an error threshold of 0.5 is used for calculat-
ing the bad pixel percentage. The table compares the results of block-matching with SNCC and simple fill-in post-processing
as proposed in (Einecke and Eggert, 2010) against post-processing SNCC block-matching with local consistency LC (Mattoc-
cia, 2009) (SNCC+LC) and the proposed anisotropic median AM filter (SNCC+AM). The average ranks are taken from the
online Middlebury benchmark at the time of submission (February 2012) to this online benchmark. For further comparison
the then top ranked approach graph-cut + segment border (GC+SB) (Chen et al., 2009) (for δ = 0.5) is also shown. Please note
that SNCC and SNCC+AM compute sub-pixel disparity values while SNCC+LC computes integer disparities. This might
introduce a negative bias for the results of LC in this table. See Table 3 for a comparison with δ = 1.0
avg Tsukuba Venus Teddy Cones
Algorithm Rank nocc all disc nocc all disc nocc all disc nocc all disc
SNCC 25.3 11.3 12.3 27.5 2.35 3.23 15.4 10.6 15.2 28.6 4.71 11.1 13.2
SNCC+LC 13.2 10.3 11.2 16.4 2.14 3.15 9.98 9.56 17.3 24.9 4.46 13.4 10.5
SNCC+AM 10.5 9.96 10.4 19.7 0.76 1.11 6.23 8.70 14.3 23.2 4.47 11.1 12.4
GC+SB 8.6 6.87 7.30 15.3 0.20 0.31 2.44 7.59 9.14 17.5 10.5 11.2 14.4
Table 3: Accuracy evaluation like in Table 2 but with an error threshold of 1.0.
avg Tsukuba Venus Teddy Cones
Algorithm Rank nocc all disc nocc all disc nocc all disc nocc all disc
SNCC 70.6 5.17 6.08 21.7 0.95 1.73 12.0 8.04 11.1 22.9 3.59 9.02 10.7
SNCC+LC 40.5 2.02 2.76 7.76 0.24 1.00 3.39 6.14 14.0 16.3 2.42 10.0 6.32
SNCC+AM 43.4 3.21 3.57 13.6 0.22 0.45 3.01 6.41 10.4 17.7 3.11 8.61 9.27
GC+SB 25.7 1.47 1.82 7.86 0.19 0.31 2.44 4.25 5.55 10.9 4.99 5.78 8.66
Figure 5: From top to bottom: disparity maps generated by block-matching with SNCC + linear interpolation (Einecke and
Eggert, 2010) copied from the Middlebury online database, SNCC + LC and SNCC + AM. Please note that SNCC + linear
interpolation and SNCC + AM compute sub-pixel disparity values while SNCC + LC computes integer disparities.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
196

SNCC block-matching. Furthermore, we apply LC as
described in (Mattoccia, 2009), i.e. without the pro-
cessing pipeline described in this paper. Again we
optimized the parameters for each approach for com-
parison. For AM we found a filter size of 19x19
to be most effective and for LC the best parameter
set is R = 39x39, γ
s
= 31, γ
c
= 21, γ
t
= 13, ρ = 40
(please note that this corresponds to the notation used
in (Mattoccia, 2009)).
The results of the comparison of the original
SNCC, SNCC plus LC and SNCC plus AM are shown
in Table 2 and Fig. 5. Again the bad pixel percent-
age with an error threshold of 0.5 is used for this as-
sessment. Furthermore, we used the temporary online
benchmark feature of the Middlebury website to see
how the average rank of the SNCC block-matching
would change in the Middlebury comparison when
applied with the more advanced post-processing of
LC or AM. As can be seen AM and LC improve the
average rank of SNCC from 25.3 to 10.5 and 13.2,
respectively. In fact SNCC+AM achieves overall the
second best result (average rank) behind graph-cut +
segment border (GC+SB) (Chen et al., 2009) in the
Middlebury online benchmark (February 2012) for
δ = 0.5. SNCC+LC would give the third best result.
One reason for the slightly worse results of LC
might be that LC is actually not considering sub-pixel
accuracies. In order to test this hypothesis Table 3
shows the performance for a disparity error thresh-
old of 1.0. Indeed, the results in Table 3 demonstrate
that LC is slightly better than AM for this less strict
threshold. Thus, one can conclude that overall LC
and AM show a very similar performance but that AM
is more advantageous for sub-pixel accurate disparity
maps while LC is more accurate for integer-valued
disparity maps.
6.1 Runtime
The runtime of AM is about 850ms for the teddy
scene on one core of an Intel Core i5 with 3.2GHz.
Considering that fast block-matching takes around
150ms (Einecke and Eggert, 2010; Humenberger
et al., 2010) for the teddy scene, AM is too slow for
a realistic real-time application on a mobile system.
In order to improve this, we apply a sparseness tech-
nique described for the census transform in (Humen-
berger et al., 2010). Instead of calculating the me-
dian of the whole neighborhood, only pixels in ev-
ery second row and column are used, i.e. only one
fourth of all neighborhood pixels are evaluated. By
doing so the runtime decreases to 270ms with a small
degradation of the result to an average rank of 12.2
which is still the second best result (February 2012)
for δ = 0.5. Hence, the sparse anisotropic median
allows for a time efficient post-processing of block-
matching approaches.
7 SUMMARY AND DISCUSSION
In this paper, we presented the anisotropic median
(AM) filter, a novel technique for disparity map post-
processing with a focus on the reduction of the fat-
tening effect. The main application we have in mind
for this post-processing are block-matching generated
disparity maps because these are prone to the fatten-
ing effect. The basic idea is to extend the standard me-
dian filter by taking only pixels into account that are
similar to the center pixel of the filter window. Due to
this, disparity values that are inconsistent with similar
pixels are replaced by consistent ones. This consti-
tutes an anisotropic smoothness constraint that is ap-
plied to the disparity map. Experiments with block-
matching stereo and different cost functions demon-
strated that in all cases AM leads to a significant im-
provement of the quality. Furthermore, a comparison
with state-of-the-art methods for disparity map refine-
ment shows that AM has a comparable performance
but at a much lower computational cost. In fact,
we could demonstrate that AM applied to disparity
maps of block-matching stereo with summed normal-
ized cross-correlation achieves the second best rank-
ing (February 2012) in the Middlebury stereo bench-
mark (δ = 0.5) with a total processing time (block-
matching plus AM) of 420ms on a single CPU core.
This highlights that real-time and accurate stereo is
possible with restricted resources as commonly found
on mobile robots and platforms.
We identified some issues of AM that need to
be tackled in future work. Currently, we use a sim-
ple region detection method to remove outlier regions
that might negativelyinfluence the performance of the
AM filter. Although this worked reliably with a fixed
parameter setting in our experiments, it is not guaran-
teed to work in general. Hence, it would be prefer-
able to replace this with a more concise technique.
Second, the used Euclidean distance over RGB val-
ues is known to be a weak color similarity measure.
For future investigations it is important to test and
compare other color spaces. Third, our experiments
involved mainly stereo data with colorful scenes. It
has to be analyzed in future work how the AM fil-
ter is coping with less saturated and monochromatic
images. This is especially important for real-world
applications where the images typically exhibit only
weak color contrasts. Fourth, the speed of AM is not
fully satisfying yet. Further strategies have to be in-
AnisotropicMedianFilteringforStereoDisparityMapRefinement
197

troduced before AM is really applicable to real-time
mobile robotic systems. One way to reduce the com-
putational cost is to use only one of the RGB color
channels or the hue channel of the HSV space or just
gray-level images. However, as discussed above this
might reduce the accuracy. On the other hand, AM is
currently using the pixel color information of one im-
age only. A symmetric approach as proposed in (Mat-
toccia, 2009) could further improve accuracy, how-
ever, at the cost of an increased computational effort.
This means one goal of the future work is also to op-
timize the different processing alternatives for a good
trade-off between speed and accuracy.
ACKNOWLEDGEMENTS
The authors would like to thank Stefano Mattoccia
from Dipartimento di Elettronica Informatica e Sis-
temistica (DEIS) of the University of Bologna for
applying his local consistent stereo method to our
SNCC data for comparison.
REFERENCES
Banno, A. and Ikeuchi, K. (2009). Disparity map refinement
and 3D surface smoothing via directed anisotropic dif-
fusion. In 3DIM Workshop, pages 1870 – 1877.
Chen, W., Zhang, M., and Xiong, Z. (2009). Segmentation-
based stereo matching with occlusion handling via re-
gion border constrains. CVIU.
Einecke, N. and Eggert, J. (2010). A two-stage correlation
method for stereoscopic depth estimation. In DICTA,
pages 227–234.
Fua, P. (1993). A parallel stereo algorithm that produces
dense depth maps and preserves image features. Ma-
chine Vision and Applications, 6(1):35–49.
Heo, Y. S., Lee, K. M., and Lee, S. U. (2008). Illumination
and camera invariant stereo matching. In CVPR, pages
1–8.
Hirschm¨uller, H. (2005). Accurate and efficient stereo pro-
cessing by semi-global matching and mutual informa-
tion. In CVPR, pages II: 807–814.
Hoare, C. A. R. (1961). Algorithm 65: Find. Communica-
tion of the ACM, 4(7):321–322.
Humenberger, M., Zinner, C., Weber, M., Kubinger, W.,
and Vincze, M. (2010). A fast stereo matching algo-
rithm suitable for embedded real-time systems. CVIU,
114(11):1180–1202.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In IJCAI, pages 674–679.
Matthies, L., Kanade, T., and Szeliski, R. (1989). Kalman
filter-based algorithms for estimating depth from im-
age sequences. IJCV, 3(3):209–238.
Mattoccia, S. (2009). A locally global approach to stereo
correspondence. In 3DIM Workshop, pages 1763–
1770.
Mattoccia, S. (2010). Fast locally consistent dense stereo
on multicore. In ECVW, pages 69–76.
Perona, P. and Malik, J. (1990). Scale-space and edge detec-
tion using anisotropic diffusion. IEEE Trans. Pattern
Anal. Mach. Intell., 12(7):629–639.
Perreault, S. and H´ebert, P. (2007). Median filtering in con-
stant time. IEEE Transactions on Image Processing,
16(9):2389–2394.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. IJCV, 47(1-3):7–42.
Sun, D., Roth, S., and Black, M. J. (2010). Secrets of optical
flow estimation and their principles. In CVPR, pages
2432–2439.
Sun, X., Mei, X., Jiao, S., Zhou, M., and Wang, H. (2011).
Stereo matching with reliable disparity propagation.
In 3DIMPVT, pages 132–139.
Tian, Q. and Huhns, M. N. (1986). Algorithms for subpixel
registration. CVGIP, 35(2):220–233.
Wang, L., Liao, M., Gong, M., Yang, R., and Nister, D.
(2006). High-quality real-time stereo using adap-
tive cost aggregation and dynamic programming. In
3DPVT, pages 798–805.
Yang, Q., Yang, R., Davis, J., and Nist´er, D. (2007). Spatial-
depth super resolution for range images. In CVPR,
pages 1–8.
Yoon, K.-J. and Kweon, I. S. (2006). Adaptive support-
weight approach for correspondence search. IEEE
Trans. Pattern Anal. Mach. Intell., 28:650–656.
Zabih, R. and Woodfill, J. (1994). Non-parametric local
transforms for computing visual correspondence. In
ECCV, pages 151–158.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
198
