Iterative Human Segmentation from Detection Windows
using Contour Segment Analysis
Cyrille Migniot, Pascal Bertolino and Jean-Marc Chassery
CNRS Gipsa-Lab DIS, 961 rue de la Houille Blanche, BP 46-38402, Grenoble Cedex, France
Keywords:
Pedestrian, Segmentation, Silhouette, Contour Segment, Oriented Graph.
Abstract:
This paper presents a new algorithm for human segmentation in images. The human silhouette is estimated
in positive windows that are already obtained with an existing efficient detection method. This accurate seg-
mentation uses the data previously computed in the detection. First, a pre-segmentation step computes the
likelihood of contour segments as being a part of a human silhouette. Then, a contour segment oriented graph
is constructed from the shape continuity cue and the prior cue obtained by the pre-segmentation. Segmen-
tation is so posed as the computation of the shortest-path cycle which corresponds to the human silhouette.
Additionally, the process is achieved iteratively to eliminate irrelevant paths and to increase the segmenta-
tion performance. The approach is tested on a human image database and the segmentation performance is
evaluated quantitatively.
1 INTRODUCTION
Human segmentation is of fundamental interest in
computer vision due to the variations in human pose
and clothing. Moreover, an accurate segmentation is
needed in many applications such as human-computer
interaction, video indexing, image editing or movie
special effects.
Recognizing person can’t be done from color and
texture. On the contrary, since a person can be rec-
ognized only from its silhouette, shape is a more de-
scriptive cue. In the proposed method, the contour
map of an image is obtained with the Canny’s opera-
tor (see Figure 1(b)). Nearly linear contour fragments
are modeled with segments (see Figure 1(c)) which
are relevant parts of the image for our study. Indeed,
the human silhouette can be rebuilt from them. The
segmentation is then performed by a reconstruction
of the silhouette from the contour segments.
Traditionally, when the detection and the segmen-
tation are performed simultaneously, the detection
process is chosen to be well-adapted to the segmen-
tation. Conversely, we aim at realizing the segmenta-
tion from one of the most efficient existing detection
method. Giving good performance, the Dalal’s algo-
rithm (Dalal and Triggs, 2005) based on Histograms
of Oriented Gradients (HOG) descriptor with Support
Vector Machine (SVM) classifier is used in numer-
ous papers (Felzenszwalb et al., 2010) (Alonso et al.,
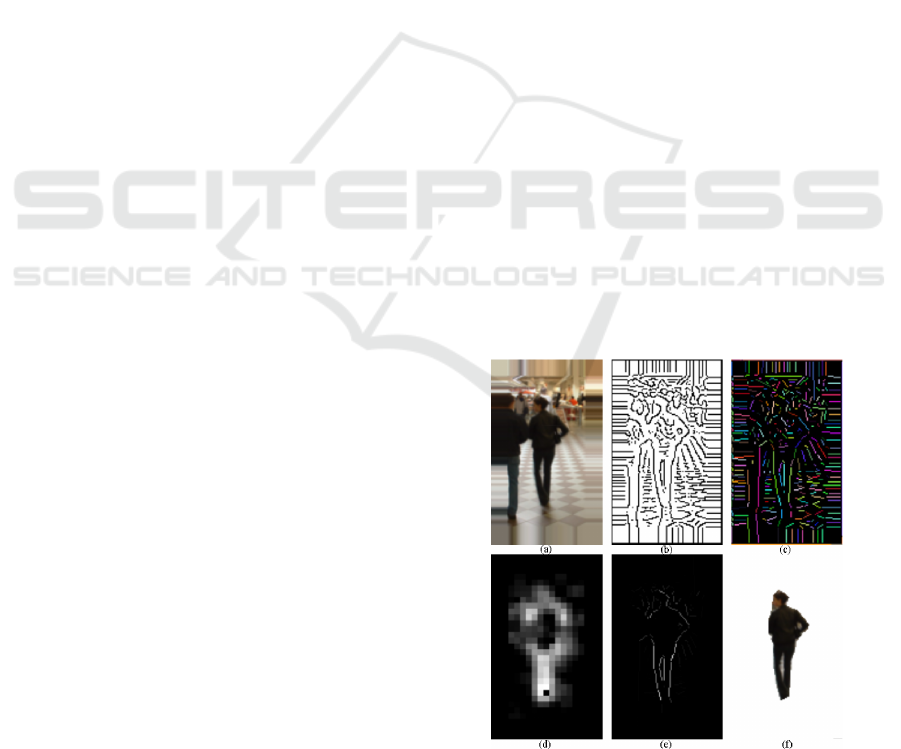
Figure 1: A detection window containing a pedestrian (a),
contour image computed with the Canny’s algorithm (b),
contour pixels gathered in contour segments (c), cells like-
lihood provided by SVM (d), likely segments computed by
the pre-segmentation (e) and segmented silhouette obtained
by our method (f).
2007) (Bertozzi et al., 2007) (Zhu et al., 2006).
In our work, the segmentation is carried out from
the detection. Indeed, the Dalal’s detection provides
detection windows (see Figure 1(a)) from the compu-
tation of the HOG. Then, our method uses these HOG
405
Migniot C., Bertolino P. and Chassery J..
Iterative Human Segmentation from Detection Windows using Contour Segment Analysis.
DOI: 10.5220/0004209404050412
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 405-412
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

to achieve the segmentation in the detection windows.
This novel proposed segmentation method is com-
posed of two steps:
Firstly, the HOG and SVM detection process com-
puted for the whole window in (Dalal and Triggs,
2005) is used in sub-parts of the window to pro-
vide more local shape information. The likelihood of
each contour segment of the window as being a part
of a human silhouette is computed and gives a pre-
segmentation (see Figure 1(e)) where the gray level
of a segment is proportional to its likelihood).
Secondly, the contour segment cycle that is the most
representative of a pedestrian is obtained by a Dijk-
stra’s algorithm in an oriented graph. This graph is
made with the contour segments as vertices and the
neighborhood between couple of close contour seg-
ments as edges. The integration of the knowledge on
the researched class (here the pedestrians) is obtained
by weighting the edges of the graph with the pre-
segmentation data. The optimal cycle finally gives the
human silhouette and provides the segmentation (see
Figure 1(f)).
Due to the human shape complexity, errors fre-
quently appear in the obtained results. Nevertheless,
some of them can be easily located. To this end the
process depicted above is iterated in the problematic
areas with updated graph features. Thus, each itera-
tion may improve the result.
The remainder of the paper is organized as fol-
lows: Section 2 reviews the human segmentation and
the use of contour segments. Section 3 describes the
pre-segmentation process. Section 4 presents the ori-
ented graph approach used for segmentation. Section
5 develops the iterative algorithm. Experimental re-
sults are presented in Section 6, followed by conclu-
sions in Section 7.
2 RELATED WORK
Human Detection and Segmentation. The descrip-
tor and classifier combination is the most used frame-
work in human detection. The descriptor converts an
image into a vector of discriminative features and the
classifier compares the features of a tested image to
the features of images of an annotated database. HOG
(Dalal and Triggs, 2005) and Haar wavelets (Oren
et al., 1997) are the most used descriptors. SVM
(Vapnik, 1995) and Adaboost (Freund and Schapire,
1995) are the most used classifiers.
Simultaneous detection and segmentation can
stem from the research of the region of interest (ROI)
which can be based on depth (with stereo as in
(Kang et al., 2002)) or color (by normalized cut as in
(Mori et al., 2007)). Otherwise, the silhouette can be
found by a template matching (Lin and Davis, 2010)
(Munder and Gavrila, 2006) where the image con-
tours are compared to the silhouettes of a codebook.
The relevance of ROI or the similarity to a template
of the codebook gives the detection. Gathering of the
ROI or finding template delineates the silhouette and
also achieves the segmentation.
Hernandez (Hernandez et al., 2010) performs face
detection and skin color model for seed initializa-
tion in a graph cut process. This initialization is
provided by a previously computed pose estimation
in (Pishchulin et al., 2012). Wang (Wang and Koller,
2011) finally minimizes an energy that simultane-
ously takes into account the body parts localization
and the segmentation.
Contour Segment Approaches. As silhouette shape
is well-descriptive of the human class, there is a range
of methods based on the analysis of its parts. Indeed
Shotton (Shotton et al., 2008) demonstrates that a few
number of fragments of outline contours permit hu-
man recognition. For segmentation, Ferrari (Ferrari
et al., 2006) focuses on the succession of descriptive
contour segments. Wu (Wu and Nevatia, 2007) builds
a classifier to recognize human parts from edgelet fea-
tures (detection) and a classifier to recognize the fore-
ground pixels (segmentation). The two classifiers are
used together to carry out the two processes simulta-
neously. Gao (Gao et al., 2009) generates from the
contour a feature named Adaptive Contour Feature
that at the same time defines a weak classifier for hu-
man detection and segmentation. Hariharan (Hariha-
ran et al., 2011) combines information from different
part detectors to classify category-specific object con-
tours. Lastly, Sharma (Sharma and Davis, 2007) finds
the relevant contour segment cycles from an oriented
graph. Then, the cycles are integrated in a Markov
Random Field and a graph cut selects the one which
are related to silhouette and achieves the segmenta-
tion.
We want that segmentation deals with an usual
and efficient detection method. Our approach, which
inversely as (Sharma and Davis, 2007), searches the
prior cue first and then the cycle, is so well-adapted.
3 PRE-SEGMENTATION
In (Dalal and Triggs, 2005), the HOG and SVM com-
bination allows the detection. For each detection win-
dow, the only obtained information is the decision
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
406
about the presence of a person in the window. Seg-
mentation needs a process at a smaller scale. The de-
tection window is partitioned in square areas named
cells. The HOG of each cell is computed. Regular
cell gatherings are formed and named block. Thus,
several HOG are associated to a single block to in-
crease the descriptiveness of its features. Then, SVM
gives a classification for each block and provides a
value S
SV M
block
which corresponds to the likelihood of
elements contained by the block as being a part of
the human silhouette. Blocks overlap so each cell be-
longs to several blocks. The value S
SV M
cell
is associated
to each cell (Figure 1(d)). It is the mean of the classi-
fication values for all the blocks that contain the cell.
The classification gives information on each cell
but our study needs to deal with elements directly re-
lated to the silhouette. The Canny’s algorithm deter-
mines the contour pixels (Figure 1(b)) which are gath-
ered in segments (Figure 1(c)). We aim to reconstruct
the silhouette from these segments. For each contour
segment seg, L
seg
is the likelihood of the segment as
being a part of the silhouette (Figure 1(e)). It is de-
fined by:
L
seg
= mean
p∈seg
(G(p)S
SV M
c
p
) (1)
where c
p
is the cell that contains the pixel p and G(p)
is the intensity of gradient of the pixel p.
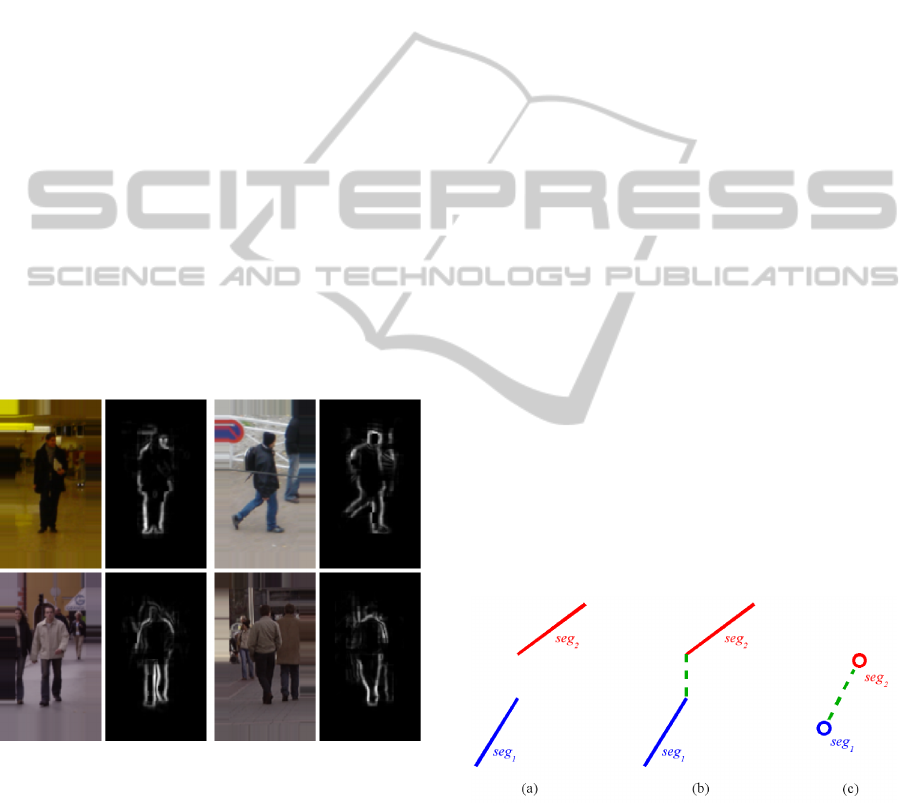
Figure 2: Product of the likelihood provided by SVM with
the gradient of the image for 4 examples. These values used
in equation 1 give accurate clues on the silhouette contour.
These data provide information that guides the
segmentation (Figure 2). A pre-segmentation of the
person is achieved.
4 SILHOUETTE REFORMATION
The most likely silhouette segments must be linked to
form the contour silhouette. Similarly to (Elder and
Zucker, 1996), an oriented graph from contour parts
(here contour segments) is studied. The graph edges
are weighted so as to give silhouette continuity and its
likelihood as human one. Hence, the likelihood com-
puted during the pre-segmentation step will be inte-
grated in the process.
4.1 Building the Graph of Contour
Segments
We create an oriented graph G(V , E) in which a path
is a sequence of connected contour segments. The
weights are set so that the searched shortest path cor-
responds to the silhouette.
A contour map of the detection window is ob-
tained with the Canny’s edge detector and is vector-
ized to provide the contour segments which are the
vertices V of the graph.
Nevertheless, some contours of the silhouette may
be absent due to lack of local contrast and introduce
gaps in the silhouette (Figure 3(a)). As in (Elder and
Zucker, 1996), contour need to be closed. Additional
segments called transitions are so introduced. They
connect the extremities of the contour segments (Fig-
ure 3(b)). These transitions are the edges E of the
graph. Connecting the right segments with the right
transitions requires large computing. Moreover, con-
tour segments that are spatially far have little proba-
bility to be consecutive in the silhouette path. Con-
sequently, only the transitions whose size is under a
determinate threshold T
t
make edges in E. The se-
quence of vertices and edges of a path in G represents
a sequence of contour segments and transition seg-
ments which gives a silhouette.
Figure 3: The lacks in the contour detection generate gaps
in the silhouette (a). A transition (dotted line) connects the
extremities of two existing segments (b). The correspond-
ing piece of graph (c).
Finally, weights are associated to the edges. To do
it, a local interaction term is defined: the affinity is
related to the probability of a contour segment seg
2
to follow a contour segment seg
1
. It associates two
notions: continuity and likelihood.
IterativeHumanSegmentationfromDetectionWindowsusingContourSegmentAnalysis
407
Continuity corresponds to the path coherence
from seg
1
to seg
2
. It is usually related to the spa-
tial distance, the magnitude difference or the orien-
tation difference between the two segments. Here,
since only the contours are studied, the magnitude dif-
ference is not available. Moreover, the irregularities
of human silhouette prevent from using orientation
continuity. Consequently, only the spatial distance is
used.
Likelihood takes into account the knowledge on
the searched class. If a segment is likely to be a part
of a human silhouette, it should be promoted.
The affinity of the path from segment seg
1
to seg-
ment seg
2
is firstly defined by:
A f f inity(seg
1
, seg
2
) = e
−
1
L
c
e
−αS
t
(2)
where L
c
is the likelihood of seg
2
as defined in equa-
tion 1, S
t
is the size of the transition segment that con-
nects seg
1
to seg
2
and α is related to the transition
segment influence.
However, the size of the contour segments is vari-
ous. The long segments must be more weighted in the
graph because they mean important parts in the path.
Moreover, the transition segments which are unlikely
to be a part of a human silhouette may be penalized.
Thus, the definition of affinity is modified as follows:
A f f inity(seg
1
, seg
2
) = e
−
S
c
L
c
e
−α
S
t
L
t
(3)
where L
t
is the transition segment likelihood as de-
fined in equation 1 and S
c
is the size of seg
2
.
Inverse logarithm is finally used to compute the
weight ω associated to the edge between the two con-
tour segments.
ω = −log(A f f inity(seg
1
, seg
2
)) (4)
4.2 The Silhouette as an Optimal Cycle
Once the graph is built, the segmentation is seen as a
shortest-path problem where the goal is, starting from
a confidence segment, to find the shortest path in the
graph (in terms of edge weights) that makes a cycle.
To do so, we use the well known Dijkstra’s algorithm.
Since human silhouette is complex and because
cumulative weights are used, the Dijkstra’s algorithm
promotes spatially short paths that can miss large
parts of the silhouette. To avoid this bias the path is
forced to pass through the two spatially farthermost
segments. So, these are actually two shortest paths
linking these two segments that are searched. The
concatenation of these two paths then provides the op-
timal cycle. As we are dealing with pedestrian, it is
assumed that these segments correspond to the top of
the head (top) and the bottom of the feet (bottom).
top and bottom are found automatically. Their
choice is made using the location, orientation and
likelihood of the segments. For a segment seg, let
(x, y) be the coordinates of its middle, θ its orienta-
tion and L its likelihood. A Gaussian function whose
parameters are set experimentally is defined for each
of these four features f :
G
µ,σ
( f ) = e
−
( f −µ)
2
2σ
2
(5)
where µ is the mean value of the feature in the dataset
and σ its standard variation.
Then the probabilities P
t
(seg) to be an appropriate top
segment and P
b
(seg) to be a bottom segment are de-
fined by:
(
P
t
(seg) = G
µ
t
x
,σ
t
x
(x).G
µ
t
y
,σ
t
y
(y).G
µ
t
θ
,σ
t
θ
(θ).G
µ
t
L
,σ
t
L
(L)
P
b
(seg) = G
µ
b
x
,σ
b
x
(x).G
µ
b
y
,σ
b
y
(y).G
µ
b
θ
,σ
b
θ
(θ).G
µ
b
L
,σ
b
L
(L)
(6)
The segments that maximize these probabilities are
chosen:
top = argmax
seg
P
t
(s)
bottom = argmax
seg
P
b
(s)
(7)
aa
5 ITERATIVE PROCESS
When some contours of the silhouette are missing, the
transitions between successive segments in the opti-
mal cycle may be long. But, the threshold T
t
de-
fined in Section 4.1 prevents from too long transi-
tions. Moreover, the Dijkstra’s algorithm does not
adapt perfectly the pre-segmentation. New iterations
of the process with the data and the models of the pre-
segmentation are so achieved to improve the segmen-
tation. They are applied on wrong parts of the seg-
mentation with more adapted features. The iterative
process is summed up in Figure 5.
Segmentation Evaluation. The segments of the cy-
cle provide a segmentation mask that is presented
to the SVM classifier already used in the pre-
segmentation step. The likelihood L
seg
of each one
is calculated using equation 1.
Updating the Cycle. The segments of the cycle
whose likelihood is under a threshold T
e
are consid-
ered to be wrong. For each sequence of successive
wrong segments in the cycle, a shortest path search
is done using a relaxed threshold and locally updated
weights: the threshold T
t
is increased at each itera-
tion to permit longer transitions. On the other hand,
the wrong segments of the sequence are penalized.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
408
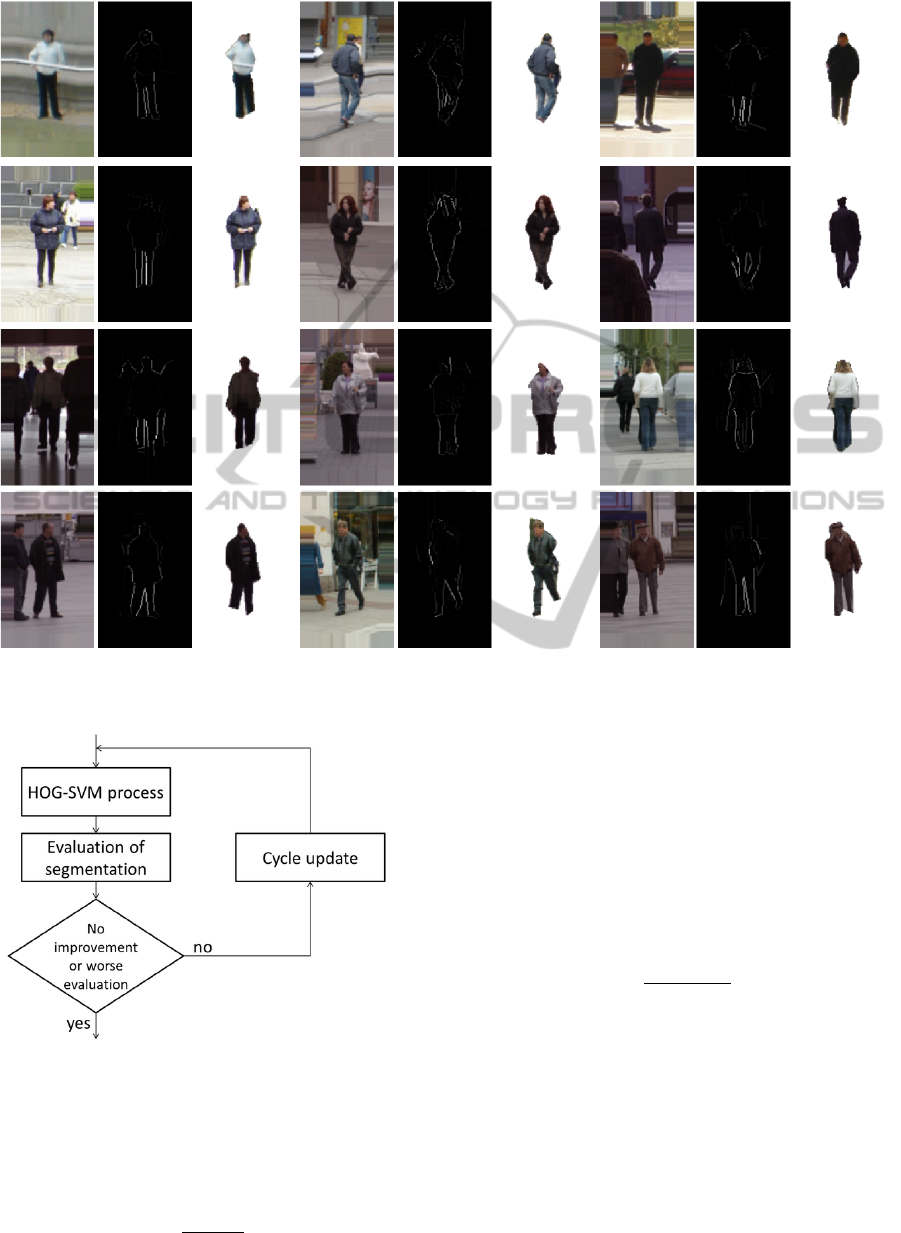
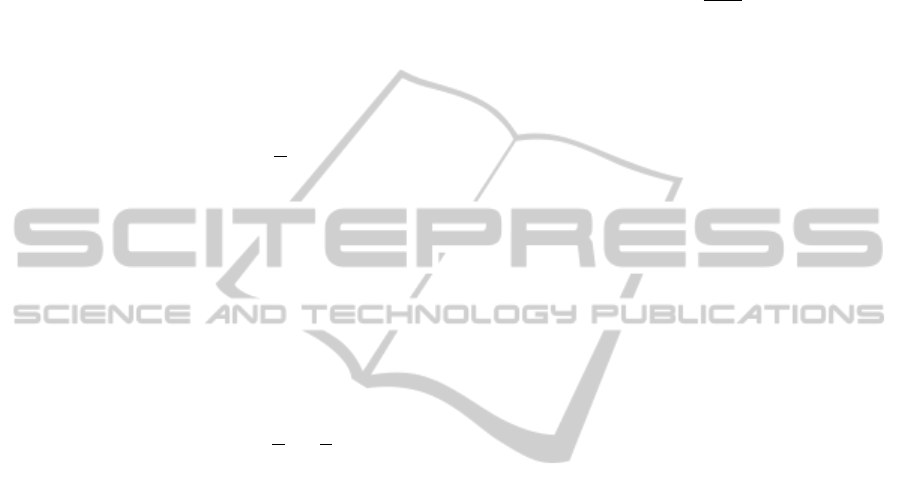
Figure 4: Segmentation of 12 pedestrians in cluttered scenes. From left to right: initial detection window, likelihood of
contour segments as being a part of a human silhouette and segmentation obtained with the iterative process.
Figure 5: An overview of the iterative process. A new iter-
ation is achieved on wrong parts of the cycle as long as it
improves the segmentation quality.
Let an edge of G that goes to a wrong segment seg
(L
seg
6 T
e
). The weight ω of the edge is updated as
follows:
ω ←
1 + T
e
1 + L
seg
ω (8)
The new path replaces the previous one in the current
cycle.
Process Termination. At each iteration, an evalua-
tion of the segments in the new current cycle is made
to check if it is better than the previous one (Figure
7(d)). The new cycle is evaluated by calculating the
mean likelihood L of the cycle weighted by the seg-
ment size S
seg
:
L =
∑
k∈cycle
S
k
L
k
∑
k∈cycle
S
k
(9)
If the value of L is smaller or equal to the previ-
ous one, the previous cycle is kept and the process is
stopped. Otherwise, an improvement is still possible
and a new iteration is performed.
6 EXPERIMENTS
The learning required for the SVM model computing
IterativeHumanSegmentationfromDetectionWindowsusingContourSegmentAnalysis
409
is achieved using 400 positive examples from a bi-
nary human silhouette image database created for this
work and from 200 negative examples of the INRIA
Static Person Data Set. The algorithm used for clas-
sification in the pre-segmentation step is SVM-light
(Joachims, 1999). It requires T
e
=0. The Canny oper-
ator parameters are adapted to the dataset. Thus we
choose the ones taken in (Dalal and Triggs, 2005).
The evaluation of the segmentation is based on
three measures advised by (Philipp-Foliguet and
Guigues, 2008). They involve a ground truth which
constitutes a reference segmentation. We manually
made the ground truths of all the testing windows.
• The F
measure
considers the compromise between
the precision and the recall of the assignation of
pixel to the foreground or the background.
F
measure
=
2. precision.recall
precision + recall
(10)
• The Martin measure checks the true assignation
of important regions.
• The Yasnoff measure computes the distance be-
tween ill-assigned pixels and the nearest pixel be-
longing to its true region. It is closely related to
the human perception of the quality of the seg-
mentation.
The F
measure
and the Martin measure give a value in
[0, 1], whereas the Yasnoff measure gives a value in
[0, +∞[. The Martin and Yasnoff measures decrease
with the segmentation performance and the F
measure
increases with the segmentation performance.
In the experiments, 400 images from the INRIA
Static Person Data Set were tested and compared to
the manually made ground-truths. The evaluation of
the segmentation is estimated from the mean of the
measures for all the tested images.
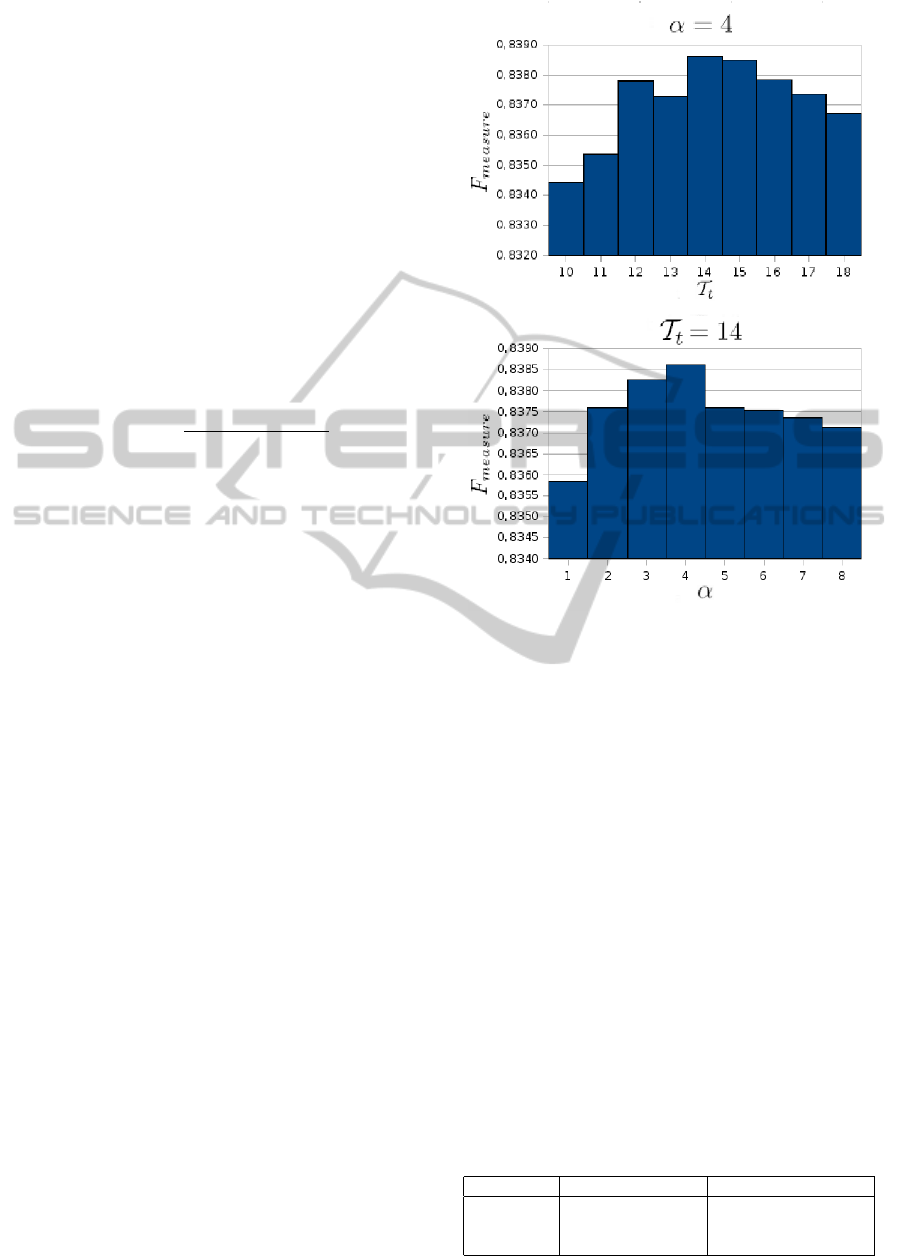
6.1 Single Iteration Evaluation
First, the experiments are only conducted on the
method without iteration. To optimize the algorithm,
the appropriate value of the threshold T
t
, related to
the maximum distance between two consecutive seg-
ments, and the appropriate influence factor α of the
transition in the graph weights (see equation 3) need
to be fixed. Figure 6 shows the F
measure
for various
values of these two parameters. F
measure
promotes the
values T
t
=14 and α=4 that are used in the sequel.
Using a non optimized C++ implementation on a
3GHz Pentium D machine, the first iteration exclud-
ing the pre-segmentation stage is processed in a mean
time of 23 ms.
Figure 6: Segmentation evaluation by the F
measure
to eval-
uate the optimal value of the threshold T
t
and the factor α.
We chose from these evaluations a threshold of 14 and a
factor α of 4.
6.2 Evaluation of the Iterative Process
On the 400 tests of the experiments, the mean number
of required iterations is 2,14. That demonstrates that
convergence is fast and computational cost is not too
high.
Multiple iterations eliminate the illogical paths
(see Figure 7). Actually, the three evaluation mea-
sures (see Table 1) confirm an important segmentation
improvement with the iterative process. The iterations
eliminate the false detections and particularly the far
ill-assigned pixel. Some examples of segmentation
obtained by this method can be shown in Figure 4.
Table 1: Evaluation measures with the Dijkstra’s algorithm
for a single iteration and with the iterative process. The
three measures demonstrate that several iterations improve
the segmentation. In order to facilitate the reading, the sign
↓ indicates a measure to minimize and the sign ↑ a measure
to maximize.
Mesure amp; First iteration amp; Iterative process
F
measure
(↑) amp; 0,8386 amp; 0,8405
Martin (↓) amp; 0,0495 amp; 0,0490
Yasnoff (↓) amp; 0,6482 amp; 0,6346
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
410
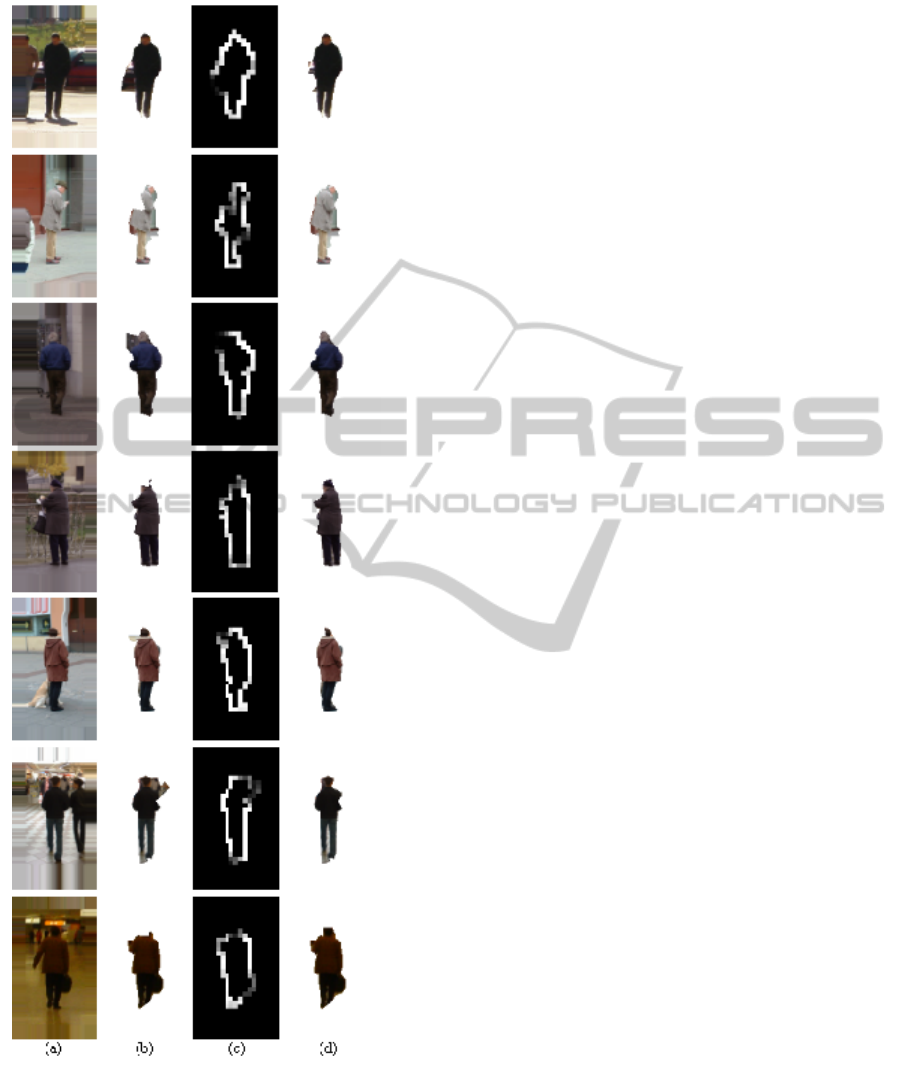
Figure 7: Segmentation improvement by the iterative pro-
cess for 8 examples: initial detection window (a), segmen-
tation obtained by a single iteration (b), evaluation of the
segments of the cycle in the first iteration (c) and segmen-
tation obtained at the end of the iterative process (d). Mul-
tiple iterations remove wrong parts of the silhouette when
needed.
7 CONCLUSIONS
In this paper, we have proposed to directly adapt a
new human segmentation process to an already ex-
isting efficient human detection method. Both pro-
cesses are closely related and data previously com-
puted in the detection are used in the segmentation.
In this way, a pre-segmentation based on a HOG and
SVM framework gives local information on the con-
tour segments. Then, the segmentation is performed
with the integration of the pre-segmentation cue in an
oriented graph. Detection and segmentation can thus
be achieved simultaneously. The quality of the seg-
mentation is increased by an iterative process.
Future research directions will involve different
issues. First of all, we have only studied static im-
ages. We could enrich descriptiveness by integrat-
ing a human motion cue. Additionally, the same pro-
cess could be adapted to others classes than “human”
(for example for cows, cars or dogs). Nevertheless,
“human” is one of the most shape descriptive class.
The same process should be less effective with other
classes. Finally, some interactions with the user could
improve performance and better deal with hard cases.
REFERENCES
Alonso, I., Llorca, D., Sotelo, M., Bergasa, L., Toro, P. D.,
Nuevo, J., Ocania, M., and Garrido, M. (2007). Com-
bination of feature extraction methods for svm pedes-
trian detection. IEEE Transactions on Intelligent
Transportation Systems, 30:292–307.
Bertozzi, M., Broggi, A., Rose, M. D., Felisa, M., Rako-
tomamonjy, A., and Suard, F. (2007). A pedestrian
detector using histograms of oriented gradients and
a support vector machine classifier. IEEE Intelligent
Transportation Systems Conference, pages 143–148.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. IEEE International Con-
ference on Computer Vision and Pattern Recognition,
2:886–893.
Elder, J. and Zucker, S. (1996). Computing contour closure.
European Conference on Computer Vision, 1:399–
412.
Felzenszwalb, P., Girshik, R., McAllester, D., and Ra-
manan, D. (2010). Object detection with discrimi-
natively trained part based models. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
32:1627–1645.
Ferrari, V., Tuytelaars, T., and Gool, L. V. (2006). Ob-
ject detection by contour segment networks. European
Conference on Computer Vision, 3953:14–28.
Freund, Y. and Schapire, R. (1995). A decision-theoretic
generalization of on-line learning and an application
to boosting. European Conference on Computational
Learning Theory, pages 23–37.
IterativeHumanSegmentationfromDetectionWindowsusingContourSegmentAnalysis
411

Gao, W., Ai, H., and Lao, S. (2009). Adaptive contour fea-
tures in oriented granular space for human detection
and segmentation. IEEE International Conference
on Computer Vision and Pattern Recognition, pages
1786–1793.
Hariharan, B., Arbelaez, P., Bourdev, L., Maji, S., and Ma-
lik, J. (2011). Semantic contours from inverse detec-
tors. IEEE International Conference in Computer Vi-
sion, pages 991–998.
Hernandez, A., Reyes, M., Escalera, S., and Radeva, P.
(2010). Spatio-temporal grabcut human segmentation
for face and pose recovery. IEEE International Con-
ference on Computer Vision and Pattern Recognition,
pages 33–40.
Joachims, T. (1999). Making large-scale svm learning prac-
tical. Advances in Kernel Methods - Support Vector
Learning.
Kang, S., Byun, H., and Lee, S. (2002). Real-time pedes-
trian detection using support vector machines. Inter-
national Journal of Pattern Recognition and Artificial
Intelligence, pages 268–277.
Lin, Z. and Davis, L. (2010). Shape-based human detec-
tion and segmentation via hierarchical part-template
matching. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 32:604–618.
Mori, G., Ren, X., Efros, A., and Malik, J. (2007). Re-
covering human body configurations: Combining seg-
mentation and recognition. IEEE International Con-
ference on Computer Vision and Pattern Recognition,
2:326–333.
Munder, S. and Gavrila, D. (2006). An experimental study
on pedestrian classification. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 28:1863–
1868.
Oren, M., Papageorgiou, C., Sinha, P., Osuna, E., and Pog-
gio, T. (1997). Pedestrian detection using wavelet
templates. IEEE Computer Society Conference on
Computer Vision and Pattern Recognition, pages 193–
199.
Philipp-Foliguet, S. and Guigues, L. (2008). Multi-scale
criteria for the evaluation of image segmentation al-
gorithms. Journal of Multimedia, pages 42–56.
Pishchulin, L., Jain, A., Andriluka, M., Thormaehlen, T.,
and Schiele, B. (2012). Articulated people detection
and pose estimation: Reshaping the future. IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 1–8.
Sharma, V. and Davis, J. (2007). Integrating appearance and
motion cues for simultaneous detection and segmenta-
tion of pedestrians. IEEE International Conference on
Computer Vision, pages 1–8.
Shotton, J., Blake, A., and Cipolla, R. (2008). Mul-
tiscale categorical object recognition using contour
fragments. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 30:1270–1281.
Vapnik, V. (1995). The nature of statistical learning theory.
Springer-Verlag.
Wang, H. and Koller, D. (2011). Multi-level inference by
relaxed dual decomposition for human pose segmen-
tation. IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 2433–2440.
Wu, B. and Nevatia, R. (2007). Simultaneous object detec-
tion and segmentation by boosting local shape feature
based classifier. IEEE Conference on Computer Vision
and Pattern Recognition, pages 1–8.
Zhu, Q., Yeh, M., Cheng, K., and Avidan, S. (2006). Fast
human detection using a cascade of histograms of ori-
ented gradients. IEEE Conference on Computer Vision
and Pattern Recognition, 2:1491–1498.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
412
