
Hybrid Particle Lattice Boltzmann Shallow Water
for Interactive Fluid Simulations
Jesus Ojeda
1
and Antonio Sus
´
ın
2
1
Dept. LSI, Universitat Polit
`
ecnica de Catalunya, Barcelona, Spain
2
Dept. MA1, Universitat Polit
`
ecnica de Catalunya, Barcelona, Spain
Keywords:
Fluid Simulation, Natural Phenomena, Physically based Animation.
Abstract:
We introduce a hybrid approach for the simulation of fluids based in the Lattice Boltzmann Method for Shallow
Waters and particle systems. Our modified LBM Shallow Waters can handle arbitrary underlying terrain and
arbitrary fluid depth. It also introduces a novel and simplified method of tracking dry-wet regions. Dynamic
rigid bodies are also included in our simulations using a two-way coupling. Certain features of the simulation
that the LBM can not handle, as breaking waves, are detected and automatically turned into splash particles.
Albeit we use a simple ballistic particle system, our hybrid method can handle more complex systems as SPH.
Both the LBM and particle systems are implemented in CUDA, yet dynamic rigid bodies are simulated in
CPU. We show the effectiveness of our method with various examples which achieve real-time on commodity
hardware.
1 INTRODUCTION
In the last years, professionals from real-time render-
ing and interactive fields have become more aware
of physically-based effects as new graphics hardware
can be used for such purposes. Among the most com-
mon features in actual computer games we find parti-
cle systems, rigid bodies and fluid simulations. Being
the last one the most complex and difficult to achieve
in real-time. Moreover, the possibility of coupling all
these simulations opens a wide range for building rich
scenes with more interactivity.
Regarding fluid simulations, the restrictions of the
equations and the extension of the simulations make
them difficult to solve. Eulerian fluid simulations
compute the fluid properties at fixed points in space,
distributed over a grid. On the other hand, Lagrangian
approximations evaluate the fluid properties at points
that are advected with the fluid itself. Whatever the
chosen method, the visualization of the fluid is usu-
ally based on its surface. For great volumes of water,
their representation can be simplified to this bound-
ary, so the 3D simulation could potentially be reduced
to a 2D simulation of an evolving height field.
Solving the 2D wave equation is a common tech-
nique to simulate fluid surfaces as height fields, but
it can not resolve effects based on horizontal veloc-
ity fields as whirlpools. To account for this, a shal-
low water framework is preferred. Derived from the
more common Navier-Stokes equations, it is imple-
mented based on a discretization on time and space
over a grid. An alternative, less commonplace, deriva-
tion of these equations, but increasing in popularity,
is based on the Lattice Boltzmann Method, which
simplifies the implementation, restricting the maxi-
mal wave speed.
A 2D heightfield representation of a fluid can not
account for many interesting phenomena that could
happen in a full 3D simulation, like breaking waves.
To improve this situation, we propose an implementa-
tion of an hybrid system that couples a Shallow Water
Lattice Boltzmann with particle systems in CUDA for
real-time fluid surface simulation with the following
key features:
• Use of arbitrary underlying terrain.
• A method to maintain stability and to track dry-
wet regions in the simulation.
• Two-way simplified coupling with rigid body sim-
ulations using a proxy system.
• Breaking wave detection conditions.
• Full particle generation, simulation and reintegra-
tion with the heightfield system.
Although we have used a ballistic particle system
for the present work, it is easily interchangeable with
217
Ojeda J. and Susín A..
Hybrid Particle Lattice Boltzmann Shallow Water for Interactive Fluid Simulations.
DOI: 10.5220/0004211302170226
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 217-226
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

other, more sophisticated methods, like SPH.
1.1 Related Work
A simple way to simulate water surfaces is based in
procedural methods, as those based in the Fast Fourier
Transform like (Tessendorf, 1999) or (Hinsinger
et al., 2002). These methods are well suited for the
generation of high resolution and large scale anima-
tions, and have been used extensively in commercial
products as movies or videogames; however, they are
not easily coupled with solid objects and are unable
to simulate eddies.
In computer graphics, (Kass and Miller, 1990)
were among the first to use a shallow waters frame-
work implemented as a pipe model where adjacent
cells are connected by pipes, through which the fluid
flows. (O’Brien and Hodgins, 1995) extended that
pipe model, using particles for the splashes generated
from falling objects. More recently, (
ˇ
St’ava et al.,
2008) ported this model to GPUs for the simulation
of hydraulic erosion. As an alternative, (Yuksel et al.,
2007) presented a novel approach using wave trains
on 2D particles to solve the wave equation. These
methods, however, can not simulate vortices or just
horizontal flow.
On the other hand, the Shallow Water Equations
(SWE) can simulate these phenomena. In addition to
the heightfield description of the fluid surface, it also
simulates a 2D horizontal velocity field. (Layton and
van de Panne, 2002) were the first to introduce them
to the graphics field. Among other works, (Th
¨
urey
et al., 2007) used them to simulate breaking waves
and later were ported to CUDA by (Chentanez and
M
¨
uller, 2010), coupling it with a particle system.
A Smooth Particle Hydrodynamics (SPH) system
can also be used to solve these equations. (Cords,
2007) coupled an SPHSW with the wave equation
to obtain higher detail fluid surfaces. (Lee and Han,
2010) ported the SPHSW simulation to CUDA and
has already been extended by (Solenthaler et al.,
2011).
Yet another formulation can be stated with the Lat-
tice Boltzmann Method (LBM). The LBMSW deriva-
tion can be found in (Salmon, 1999) and has been
used in various scenarios. Among others, (Th
¨
urey,
2007) coupled it with a full 3D LBM simulation and
(Th
¨
ommes et al., 2007) used it to simulate the cur-
rents in the strait of Gibraltar. More recently, (Zhou,
2011) simplified the force terms of the formulation.
As the LBM is quite similar to a cellular automata,
it can be implemented in a parallel setting without
much effort with regard to other methods. There are
already GPU implementations as (Wei et al., 2004),
where it was adapted using textures; but more re-
cently, with the advent of general programmability of
GPUs we find CUDA implementations like (T
¨
olke,
2010) and (Obrecht et al., 2011). (Bailey et al., 2009)
proposed an alternative kernel implementation to re-
duce memory usage and (Geveler et al., 2010) tar-
geted multiple different parallel architectures using
higher-level libraries for solving the LBMSW model.
2 METHODOLOGY
The main steps our hybrid particle-LBM coupling ex-
ecutes for one time step (or render frame) can be sum-
marized, following the same order as the explanation
through this paper, as:
1. LBMSW fluid simulation.
2. Rigid body simulation.
3. Two-way coupling of rigid bodies and LBMSW.
4. Particle generation and simulation.
5. Render
The first step is to advance the LBMSW simula-
tion explained in Section 2.1. This takes into account
external forces and the dry-wet region tracking from
Section 2.2. Using any external package, as the Bullet
Physics library in our case, rigid bodies are simulated.
These are then coupled with the fluid as presented in
Section 2.3. This two-way coupling affects the move-
ment of the dynamic objects but also modifies the be-
haviour of the fluid. Next, particles are generated and
simulated for all the fluid regions the LBMSW can
not handle, as breaking waves. These particles sub-
tract some volume from the LBMSW in their genera-
tion and restore it back when they fall to the surface
again. Details about this process will be discussed in
Section 2.4. Finally, the render of the scene should
be done. Although we have implemented the render
phase with OpenGL, it is out of the scope of this pa-
per.
The mathematical formulation gives the basic un-
derstanding for the reproduction of our results but we
will provide more specific details about the CUDA
implementation in Section 3.
2.1 Lattice Boltzmann Shallow Waters
In contrast to other methods where a set of partial dif-
ferential equations is discretized and solved directly,
the Lattice Boltzmann Method already provides a dis-
crete model suitable for parallel computations using
only arithmetic operations. The fluid is simulated by
particle distributions over a regular grid (distribution
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
218

functions d f s). The particle’s movement is restricted
to certain directions e
i
defined by the Boltzmann dis-
cretization used.
e
0
e
1
e
2
e
3
e
4
e
5
e
6
e
7
e
8
Figure 1: D2Q9 model: nine velocity square lattice.
We use the D2Q9 model, pictured in Figure 1,
and assuming an adimensional parametrization as in
(Th
¨
urey, 2007), the velocity vectors e
0..8
take the val-
ues: e
0
= (0,0)
T
, e
1,2
= (±1,0)
T
, e
3,4
= (0,±1)
T
and
e
5..8
= (±1, ±1)
T
.
The Lattice Boltzmann Equation, then, defines the
behaviour of the fluid by the chosen collision oper-
ator. We employ here the common BGK operator
(Qian et al., 1992)
f
i
(x +e
i
∆t,t + ∆t) = f
i
(x,t) −ω( f
i
− f
eq
i
) + F
i
, (1)
where f
eq
i
is the d f for the e
i
direction, ω is the relax-
ation parameter, in close relation with the viscosity
of the fluid, and f
eq
i
is the local equilibrium distribu-
tion function, which defines the actual equations that
are being solved. The original SWE can be recovered
by applying Chapman-Enskog expansion if f
eq
is de-
fined like in, e.g., (Salmon, 1999)
f
eq
i
(h,u) =
(
h
1 −
5
6
gh −
2
3
u
2
, i = 0,
λ
i
h
gh
6
+
e
i
·u
3
+
(e
i
·u)
2
2
−
u
2
6
, i 6= 0,
(2)
where λ
i
= 1 for i = 1..4 and λ
i
= 1/4 for i = 5..8. g
is the gravity and h and u are the macroscopic fluid
properties; height level from the underlying terrain
and velocity, respectively, calculated as
h(x,t) =
∑
i
f
i
, (3)
u(x,t) =
1
h
∑
i
e
i
f
i
. (4)
From Equation 1, F
i
are the external forces applied
to the LBMSW. In contrast to how these forces are
applied in, e.g., (Th
¨
ommes et al., 2007) or (Geveler
et al., 2010); (Zhou, 2011) stated them with simpler
arithmetic operations as
F
i
= X
i
+ Z
i
. (5)
From a constant underlying terrain z
b
(x) defined as a
heigthfield, X
i
is the force caused by its slope as
X
i
=
(
g
¯
h
2
[z
b
(x + e
i
∆t) −z
b
(x)], i = 1..4,
0, otherwise,
(6)
with
¯
h = [h(x + e
i
∆t,t) + h(x,t)]. (7)
Z
i
internalises other forces F, as friction, wind or the
Coriolis effect, defined as
Z
i
=
(
0, i = 0,
F
α
6e
i
α
, i 6= 0,
(8)
where α is a Cartesian index and Einstein summation
convention is used. The same can be applied to e
i
α
.
We only consider the friction with the underlying ter-
rain, so F
α
is defined as
F
α
= C
t
u
α
√
u
β
u
β
, (9)
where β is the other Cartesian index and C
t
is the ter-
rain friction coefficient, defined as a constant. u
α
and
u
β
are the components of the fluid velocity in the α
and β directions, respectively.
As boundary conditions, we use a no-slip bound-
ary which provides normal and tangential velocities
equal to 0. For the LBM, this type of boundary is eas-
ily implemented as a bounce-back rule: the d f s that
should be streamed from boundary cells are just in-
verted as
f
i
(x,t +∆t) = f
˜
i
(x,t), (10)
where f
˜
i
is the d f in the opposite direction of f
i
, i.e.,
e
i
= −e
˜
i
.
Additionally, we use for the rest of the paper the
value η defined as
η(x,t) = h(x,t) + z
b
(x). (11)
2.2 Dry-wet Region Tracking
In order to be able to track dry regions, i.e., cells
that do not contain fluid, we modify the original algo-
rithm. We define a threshold ε as the minimal height
a cell must satisfy to be considered a Fluid cell. Af-
ter an iteration of the LBM has been executed, we
must look for cells whose level has dropped below
the threshold. For all the found cells, we must tag
them as Empty. In order to not lose fluid mass, we
also distribute the remainder of the fluid between the
Fluid neighbours favoring the direction of the under-
lying terrain gradient as follows:
f
i
(x + e
i
∆t) = f
i
(x + e
i
∆t) + h(x) ·(ζ
i
/ζ
total
), (12)
where ζ
total
is the sum of all weights ζ
i
, which are
computed as
ζ
i
=
−(∇z
b
·e
i
) if −(∇z
b
·e
i
) > 0 and cell at
(x + e
i
) is a Fluid one,
0 otherwise.
(13)
HybridParticleLatticeBoltzmannShallowWaterforInteractiveFluidSimulations
219
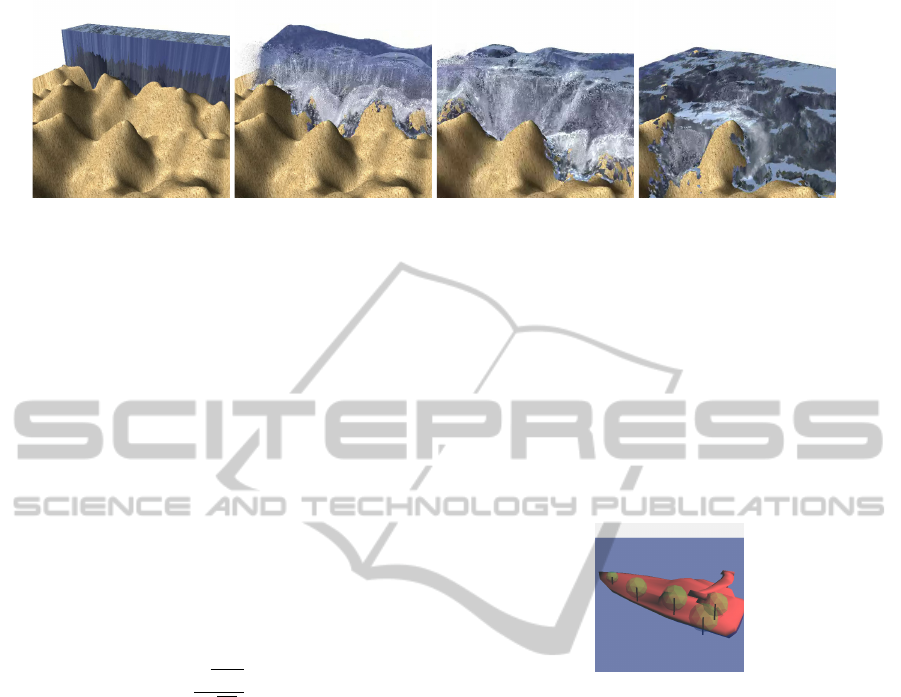
Figure 2: Image stills from the breaking dam over noisy ground example. Using values of ε = 0.1 and ϕ = 0.95.
Seamlessly, we search also for Fluid cells whose
fluid level is above the threshold and whose neigh-
bours are Empty cells. We tag these Empty cells as
Fluid, in order to allow the advance of the fluid from
the Fluid tagged cell.
This simple addition enables for the tracking of
dry-wet regions, but yet one more limitation of the
LBM has to be circumvented to allow fully functional
simulations. This comes from Equation 4, where, as
the fluid level goes down, the velocities can grow very
large and lead to inevitable instabilities. In contrast
to (Geveler et al., 2010), where they worked around
this by using a modified minmod flux limiter, we
have used a more direct approach. It is known that
the LBMSW is suitable for subcritical flows (Zhou,
2004), and this condition is given by the Froude num-
ber which relates the characteristic velocity of the
fluid to a gravitational wave velocity
Fr =
√
u ·u
√
gh
, (14)
which is defined as Fr < 1 for subcritical flows.
We define an upper limit parameter ϕ for that ratio.
When, due to low fluid height, the ratio does not hold,
we compute a new suitable velocity u for the fluid
and replace the d f s of the cell with new ones com-
puted from Equation 2. Also, we can further use this
condition to dampen high velocities through the full
body of fluid and ensure a stable simulation.
Although not physically correct, this method en-
sures stability in a similar fashion to the Smagorinsky
method (Hou et al., 1996), it changes the local viscos-
ity of the fluid and dampens high velocities, as can be
seen in Figure 2. The Smagorinsky method can addi-
tionally be applied here for improved stability condi-
tions.
2.3 Two-way Coupling of Dynamic
Objects
In this section we explain how dynamic objects,
more specifically rigid bodies, are introduced to the
LBMSW simulation. We propose the use of a proxy
model to decouple the complexity of the interaction
of the fluid with the object mesh, in contrast to (Chen-
tanez and M
¨
uller, 2010), where they use a tessellated
mesh to the level of using triangles of areas similar to
∆x
2
, from the fluid simulation.
Our proxy model is composed of a set spheres
with some properties defined, and can be under-
stood as a rough discretization of the object mesh.
The properties defined for the spheres are the ra-
dius r, the position p = (p
x
, p
y
, p
z
)
T
and a normal
n = (n
x
,n
y
,n
z
)
T
. During the simulation, the spheres
will also hold a velocity v = (v
x
,v
y
,v
z
)
T
.
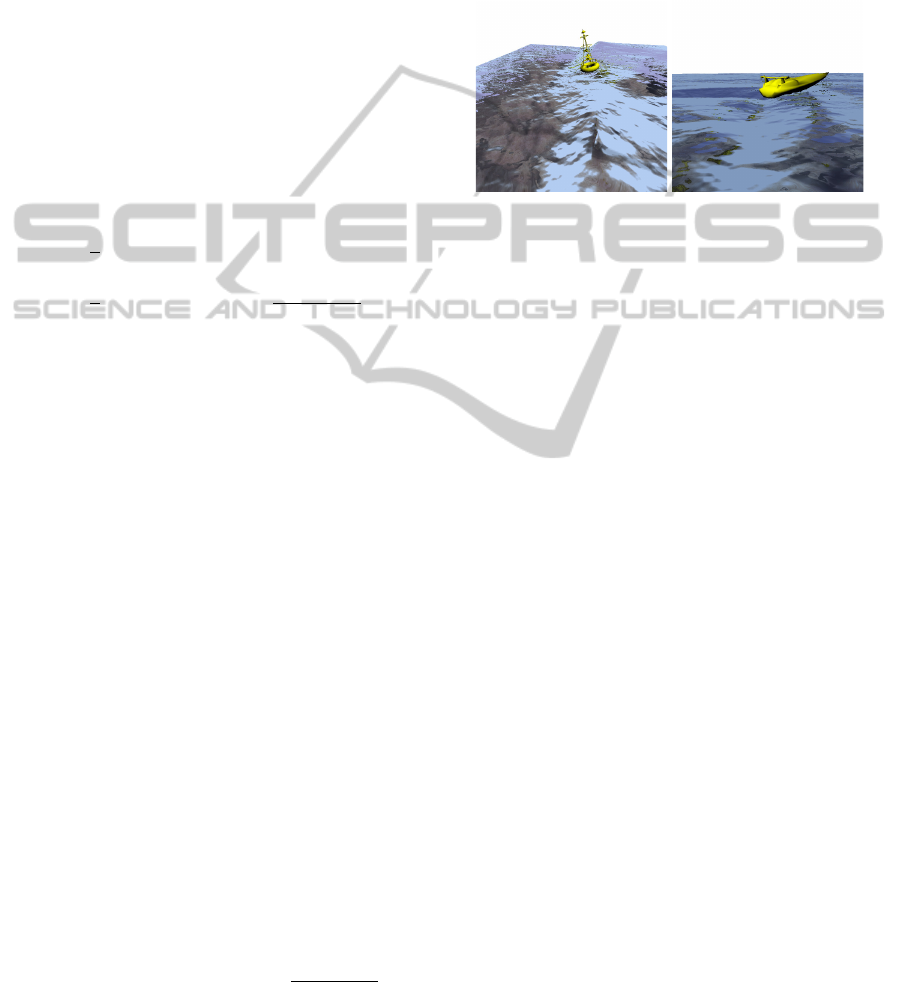
Figure 3: Sphere discretization example for a boat model.
The spheres are positioned and sized within the model, their
normal vectors represented by the black short lines.
For our examples, we have used manually dis-
cretized models, as the boat in Figure 3. Depend-
ing on the number of spheres, their size and position
within the model, the simulation becomes more ac-
curate but also more expensive. For a regular spaced
discretization with spheres of radius r < ∆x/2 we ob-
tain similar visual results to (Chentanez and M
¨
uller,
2010).
2.3.1 Fluid to Solid
For the implementation of the fluid to solid coupling
we follow the path of (Yuksel et al., 2007) and (Chen-
tanez and M
¨
uller, 2010). There are three major forces
a fluid can induce to a solid body: buoyancy, drag and
lift. They will be computed at the position of each
sphere of the proxy object. The values needed from
the fluid will be bilinearly interpolated. We assume
that the simulation plane is xz, thus ˆy = (0, 1,0)
T
.
The buoyancy force points upward and is propor-
tional to the weight of the displaced fluid, we can de-
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
220
fine it for sphere i as
f
buoy
i
=
(
0 if S
p
i
−S
r
i
> η
p
,
gρV
sub
ˆy otherwise,
(15)
where, η
p
is the water level at the sphere position,
S
r
i
is the sphere radius, S
p
i
is the y coordinate of the
location of the sphere, ρ is the density of the fluid and
V
sub
is the volume of the submerged part of the sphere
calculated as
V
sub
=
Z
top
−S
r
i
π(S
r
i
2
−x
2
)dx, (16)
with top = (η
p
−(S
p
i
−S
r
i
)).
Drag force is a resistive force and is dependent on
the actual velocity of the obstacle with regard to the
fluid. Lift is a force perpendicular to the oncoming
flow direction, it contrasts with the drag force as that
one is parallel to the flow direction. For sphere i, they
are defined as
f
drag
i
= −
1
2
C
D
A
2D
ku
rel
ku
rel
, (17)
f
li f t
i
= −
1
2
C
L
A
2D
ku
rel
k
u
rel
×
S
n
i
×u
rel
kS
n
i
×u
rel
k
,
(18)
where C
D
and C
L
are the drag and lift coefficients,
u
rel
is the relative velocity of the sphere with respect
to the fluid, S
n
i
is the normal defined for the sphere
and A
2D
is the area of the circle that cuts the sphere at
water level η
p
.
The forces are finally added to the ith sphere. The
rigid body simulator will take care of the evolution of
the proxy model and will provide the corresponding
transform which will be applied in the render phase.
2.3.2 Solid to Fluid
In this case, the rigid body will modify the behaviour
of the fluid. As before, the computations are done
per sphere. To change the fluid correctly, we get the
velocity of the obstacle for the ith sphere as v and
the difference between the submerged height of the
sphere and the fluid level as depth. We compute the
following values
decay = exp(−depth), (19)
h
o
= decay ·C
dis
·depth, (20)
u
o
= decay ·C
ad p
·v, (21)
and input these h
o
and u
o
into the LBM equilibrium
distribution, Equation 2, updating the previous d f s as
f
0
= f
0
−h
o
,
f
i
= f
i
+ f
eq
i
(h
o
,u
o
) +
f
eq
0
(h
o
,u
o
)
w
o
,
where w
o
=
5 i = 1..4,
20 i = 5..8.
(22)
The values of w
o
are calculated from the contribu-
tion each e
i
gives on the D2Q9 model (He and Luo,
1997). With this computation we push the fluid the
obstacle is displacing to the neighbour cells, taking
into account in this process the obstacle velocity. Ad-
ditionally, to avoid high differences between contigu-
ous points of the fluid mesh, we distribute the h
o
and
u
o
among the nearest cells using linear interpolation.
Figure 4: A buoy is being dragged by the fluid (left). The
boat introduces some new fluid waves at its tail as a result
of the coupling (right).
decay takes into account the depth the sphere is at
and limits accordingly the effect it has over the fluid
surface. C
dis
and C
ad p
are parameters in the range
[0,1] that allow to dampen the effect of the coupling
as desired. We have used the values C
dis
= 0.8 and
C
ad p
= 0.5 for the examples of Figure 4.
2.4 Particle Systems Coupling
The LBMSW model described so far is only capa-
ble of representing fluids as heightfields. It is lim-
ited in the kind of phenomena that can be simulated,
e.g., breaking waves can not be resolved. In order to
deal with this restriction, we have coupled it with a
ballistic particle system and adapted the detection of
breaking waves and generation of the respective par-
ticles from (Chentanez and M
¨
uller, 2010). Because
there is no silver bullet for every situation when par-
ticles should be generated, they proposed also meth-
ods to detect when to generate (and how to initialize)
particles for the interaction with obstacles and terrain
discontinuities like waterfalls, which could also be
adapted to our system. As these methods are tailor-
made for each situation, we restrict ourselves to the
breaking wave example. In contrast, we will present
an implementation that allows alternative particle sys-
tems like SPH with minor changes in Section 3.
To be consistent with the LBM, we use the same
adimensional parametrization, so ∆x and ∆t are con-
sidered to be equal to 1 inside the iteration. For ren-
der purposes, a redimensionalization must be applied,
however.
HybridParticleLatticeBoltzmannShallowWaterforInteractiveFluidSimulations
221

2.4.1 Breaking Wave Detection
Waves that would break in a full 3D simulation just
produce singular waves due to numerical instability
in a Shallow Waters simulation. The detection of
this situation for a given cell (i, j) is done via three
parametrized conditions:
k∇η
i, j
k > Φg, (23)
η
i, j
−η
prev
i, j
> Ψ, (24)
∇
2
η
i, j
< ϒ, (25)
where η
prev
i, j
is the fluid height in the previous time
step and Φ, Ψ and ϒ are parameters, which should
be tailored per scene, and more specifically by its
scale. Equation 23 ensures the wave is steep enough
to break. Equation 24 requires that the cell is part
of the front of the wave and it is raising fast, intro-
ducing a comparison with the previous value of fluid
height. Finally, Equation 25 makes sure particles are
only generated near the top of the wave.
The computation of ∇η
i, j
is done using the maxi-
mum among the one-sided derivatives
∇η
i, j
=
"
max(|η
i+1, j
−η
i, j
|,|η
i, j
−η
i−1, j
|)
∆x
max(|η
i, j+1
−η
i, j
|,|η
i, j
−η
i, j−1
|)
∆x
#
. (26)
Similarly, ∇
2
η
i, j
is computed using central differ-
ences as
∇
2
η
i, j
=
η
i+1, j
+ η
i−1, j
+ η
i, j+1
+ η
i, j−1
−4η
i, j
∆x
2
.
(27)
If all three conditions are met, the next step will
generate and initialize particles for the given cell. The
total volume V
total
the added particles will subtract
from the LBMSW is proportional to k∇η
i, j
k−Φg and
can be controlled introducing a new parameter θ, as
V
total
= θ(k∇η
i, j
k−Φg). (28)
2.4.2 Particle Generation
For each cell detected in the previous step, a num-
ber of particles will be generated for the volume of
Equation 28. For a particle of radius r, its volume is
V
p
=
4
3
πr
3
.
The particles are positioned within a cell-centered
rectangle of width equal to the LBMSW cell width
and height V
total
as shown in Figure 5. This rectangle
is oriented with the opposite direction of the gradient
computed in Equation 26.
The particle velocities in the xz plane are defined
by the wave speed as in (Th
¨
urey et al., 2007) and the
y component can be defined as a fraction of the height
ˆ
x
ˆ
y
ˆ
z
η
(
i, j)
∆x
∆x
−
∇η
(i, j)
k∇η
(i, j)
k
Figure 5: For breaking wave detected particles, they are
placed within the red rectangle in their generation step.
differences from Equation 24 as
v
xz
=
−∇η
i, j
√
gh
k∇η
i, j
k
, (29)
v
y
= λ
y
(η
i, j
−η
prev
i, j
), (30)
where λ
y
controls the fraction. We have used here a
value of λ
y
= 0.1.
Additionally, we lightly perturb the velocity of
each particle and jitter their initial positions between
[
−∆x
2
,
∆x
2
] in the gradient direction. These little pertur-
bations add variation and result in less uniform, more
chaotic, particle movement.
The total volume the particles supply must be sub-
tracted from the LBMSW, as well as the momentum
they get. We do this by computing the equilibrium
distribution function from Equation 2; using as input
values V
total
and the xz velocity components from the
particle velocities, prior to the perturbations we ap-
ply. These newly computed equilibrium d f s will be
subtracted from the cell’s original d f set as
f
i
= f
i
− f
eq
i
V
total
∆x
2
,v
xz
. (31)
As said previously, particles are not restricted to
be generated only from the detected breaking waves
of the previous step. We can generate and initial-
ize particles with other requirements in mind, like a
faucet pouring fluid into a basin as demonstrated by
Figure 6.
Figure 6: Particles generated in middle air (like a heavy rain
or some pipe open tab), integrated afterwards to the bulk of
the fluid. After a few seconds, the level of the LBMSW is
effectively raised.
2.4.3 Particle Reintegration
Finally, the particles must be reintegrated to the
LBMSW when they hit the surface of the fluid, i.e.,
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
222

p
y
≤ η
i, j
. The volume the particles carry, as well as
their momentum, must be absorbed by the cell they
fall on.
As the LBMSW has no explicit method to input
vertical velocities, we introduce an interpolation for
the absorption of the volume of the particle among the
cell’s d f s. This interpolation is based on the terminal
speed the particle could achieve, defined as
v
T
=
r
8rg
3C
D
, (32)
where C
D
is the drag coefficient. We normalize the
particle’s vertical speed with v
T
and clamp the result
to the range [0,1], as χ = clamp(v
y
/v
T
,0, 1).
Taking into account the previous consideration,
we calculate f
eqχ
0
as
f
eqχ
0
= f
eq
0
V
p
∆x
2
,v
xz
, (33)
and we can finally update the d f s of the cell using the
following computations
f
0
= f
0
+ (1 −χ) · f
eqχ
0
, (34)
f
i
= f
i
+ f
eq
i
V
p
∆x
2
+ χ f
eqχ
0
,v
x
z
. (35)
Similarly to the obstacle to fluid coupling from
Section 2.3.2, using the interpolation with the ter-
minal speed, the added volume is pushed from the
cell’s center to its neighbours with more energy, the
faster the particle drops. Figure 2 shows how particles
generated from a breaking dam wave are reintegrated
even in dry sections and Figure 6 shows how the water
level of a basin is effectively raised from the mid-air
dropped particles.
3 IMPLEMENTATION DETAILS
In this section we give some implementation details of
the Particle-LBMSW coupling. As there is no simple
way to maintain a dynamic data structure for the par-
ticles, i.e., particles should be created and destroyed
on the fly; we have resorted to a fixed number of parti-
cles from the beginning of the simulation. In addition
to the usual particle properties as position and veloc-
ity, we add two more: a TTL (time-to-live) value and
an active (ACTIVE/INACTIVE) flag. We will explain
their use in the particle-related functions.
In Algorithm 1 we show high-level pseudo-code
for the full simulation. All CUDA functions are ker-
nels, except the sort, remove and prefix sum parallel
operations, which are provided by the Thrust library.
There are kernels that are only targeted to a limited
Algorithm 1: Full per frame hybrid Particle-LBMSW high-
level algorithm.
dt = (∆t) frame time step (16ms)
dt’ = (∆t
0
) LBM dimensional time step
foreach(frame) {
//CPU
ObstacleSimulation();
ObstacleFluidCoupling();
//CUDA
ReintegrateParts_S1();
sort_tuples();
remove_nonValidTuples();
prefix_sum_tuples();
ReintegrateParts_S2();
for(i=0; i<dt; i+=dt’) {
LBM_stream_collision();
LBM_applyForce();
upd_CellTags_pre();
upd_CellTags_Fluid();
upd_CellTags_Empty();
}
computeLBM_GradLaplacian();
sort_particlesByTTL();
stepParticles();
detectBreakingWaveCells();
prefix_sum_NeededPartsPerCell();
initParticles();
//Render
}
group of cells or particles; they provide an early exit
condition for the elements that are not to be changed.
Below, we will explain the different kernels, starting
from the LBM simulation to the Particle coupling at
last.
The LBM core simulation, executed in the
LBM stream collision kernel is basically the same as
previous LBM implementations in CUDA like, e.g.,
(Geveler et al., 2010), (T
¨
olke, 2010) or (Obrecht et al.,
2011); using the BGK collision operator instead of
the MRT one. This is done in an inner loop, as the
∆t
0
for the LBM is quite smaller than the ∆t of the
frame and depends on the parametrization used. In
contrast to (Bailey et al., 2009), where they proposed
an A-A memory access pattern to reduce memory re-
quirements, we have used an A-B memory access pat-
tern; there are two arrays for the d f s in memory and
they are interchanged after each iteration inside the
for loop. The reason for this choice is the additional
operations we are doing, they would have required to
double the kernels, as the A-A memory access pat-
tern needs two kernels just for the core simulation.
Nevertheless, we use separated arrays for each d f , in
order to ensure coalesced memory accesses like pre-
vious works.
HybridParticleLatticeBoltzmannShallowWaterforInteractiveFluidSimulations
223

The LBM applyForce kernel adds the force terms
from Equation 5 for the underlying slope and friction.
The three kernels upd CellTags * are the ones
responsible for the actual Dry-Wet region tracking.
Fluid cells that have a height above the threshold
ε must convert their Empty neighborhood to Fluid
in order to allow the fluid to advance. Seamlessly,
Fluid cells with a height below the threshold must
be changed back to Empty. As CUDA executes by
warps inside blocks, we could fall into race condi-
tions in this change of type for the cells. To solve
this problem, we have to serialize the reflaging opera-
tions, thus the three kernels. upd CellTags pre checks
the height of the cells against the threshold and pre-
flags them with an additional type if necessary: to-
beFluid or tobeEmpty. Next, we change the type of
the cells conservatively, first the Fluid-to-be ones and
then the Empty ones. This way, we ensure no cells are
changed prematurely if they should be needed in the
next iteration.
Then, the computation of the gradient and lapla-
cian of the fluid height is done for further use in the
breaking wave detection kernel.
The particles are then sorted by their TTL in as-
cending order. The particle simulation is advanced in
stepParticles, depending on the chosen particle sys-
tem. For a ballistic particle system, the velocity and
position of the particles are updated ignoring possi-
ble interaction between particles. The particles’ TTL
are also updated, subtracting the current ∆t. Their sta-
tus is also updated to ACTIVE. If a particle has died
(TTL ≤ 0) before being reintegrated, we let them be
ACTIVE but out of view. We can use this same be-
haviour for particles exiting the domain. This ensures
we don’t lose mass because of dead particles in the
particle generation step.
From the previously computed gradient and lapla-
cian and Equations 23 to 24 we detect the cells that
have a breaking wave. Each cell will output the
needed particle count that it needs. Then, with a
prefix sum operation we can obtain an accumulated
sum of the needed particles. We can use the result
of this accumulated sum as the index at the particle
array for which each cell will take their needed parti-
cle count. As particles have been sorted by TTL, we
ensure the particles first taken in this step are those
who had a lower TTL. Unfortunately, if more particles
are needed than those with a TTL = 0, the next with
lower TTL will be taken. With a bad parametriza-
tion this can lead to artifacts, as disappearing parti-
cles from frame to frame as they are needed. init-
Particles will, then, initialize the particles needed for
each cell as explained in Section 2.4.2, marking them
as ACTIVE2 which ensures they are alive at least for
a frame. Their TTL is also set up as the maximum
allowed time to live for a particle, which is a user-
defined parameter. For particles that were previously
marked as ACTIVE, no fluid will be subtracted from
the LBMSW, ensuring no mass loss; thus, only IN-
ACTIVE particles will take fluid from the LBMSW.
Needless to say, these steps for the detection and ini-
tialization of particles can be changed or improved to
take into account more situations as those described
in (Chentanez and M
¨
uller, 2010).
Finally, although we have written it as one of the
first steps in Algorithm 1, the particles are reintro-
duced. Only ACTIVE particles will be looked for.
For these particles, the reintegration should be as
easy as the explanation from Section 2.4.3 but, as we
can’t be sure how many particles can fall in a cell
at once, we should use atomic operations in the up-
date of the cell’s d f s. As our hardware, a GTX280,
does not support these operations for float variables,
we had to solve it from another perspective: Rein-
tegrateParts S1 relates which particles have fallen in
which cells and how many there are for each cell;
from the cell point of view, ReintegrateParts S2 will
gather the fallen particles and update the local d f s. In
order to do so, for each particle, S1 will write a tuple
associating the cell id (the cell’s position in a linear
memory array) with the particle id, as well as the par-
ticle count for each cell (using integer atomics). Par-
ticles not to be reintegrated are associated to a fake
cell, in this case we use the cell 0 that we ensure is a
Boundary cell for all examples. Sorting the tuples by
the cell id, removing those with the fake cell id and
doing a prefix sum on the particle-in-cell count will
lead us to the cells having the index where their par-
ticle count starts in the tuple array. S2 will, for each
cell, take their counted fallen particles and reintegrate
them, marking them as INACTIVE with TTL = 0.
While the rigid body simulation is done in CPU,
we can only update the values as in Section 2.3 using
the CUDA memory arrays (not the opaque CUDA Ar-
ray handlers) mapped to CPU memory space.
As all the data needed is already in the GPU,
we use Vertex Array Buffers to interoperate with
OpenGL in the render phase.
4 RESULTS AND DISCUSSION
We have tested our implementation both on CPU with
OpenMP and GPU with CUDA, timings shown in Ta-
ble 1 for various examples. Our test system was an In-
tel Core2Duo E8400 with 4GB of RAM memory and
a Nvidia GTX280 running Ubuntu 11.10. We have
used the Bullet Physics library for the simulation of
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
224
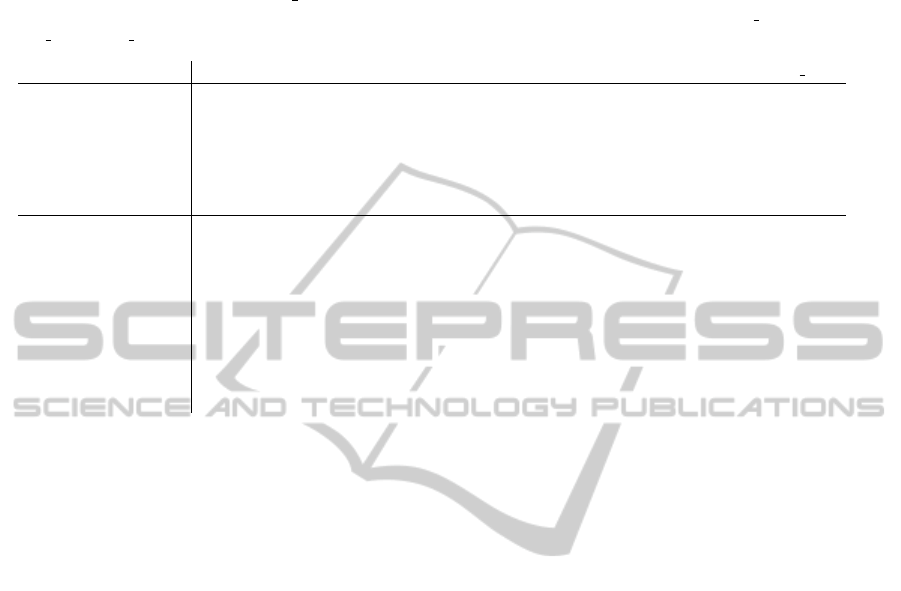
Table 1: Timing per frame for various examples in milliseconds; the number in the name of the example indicates the total
number of particles used, where k = 2
10
. LBMSW includes the LBM simulation, as well as the dry-wet region tracking.
Solids accounts for the 2-way coupling of dynamic rigid bodies. PGen, PSim and PReint are the timings for the generation and
initialization, simulation and reintegration of the particles respectively. We have extracted the timings for the sort operation
from the Thrust library in Psort and PReint sort, as they do not depend directly on the other steps but have a significant impact
on the results, more heavily on the CPU version. Psort is for the sorting of particles by their TTL. PReint sort is the sort of
the (cell id, particle id) tuples.
Total LBMSW Solids Psort PGen PSim PReint PReint sort
CPU
boat 10.78 10.69 0.09 0.00 0.00 0.00 0.00 0.00
buoy 10.91 10.85 0.06 0.00 0.00 0.00 0.00 0.00
drop 32k 372.96 9.97 0.00 214.56 1.16 1.46 31.50 114.31
drop 128k 1635.36 9.75 0.00 1001.35 2.09 2.79 114.92 504.46
wave 32k 410.88 9.62 0.00 224.04 3.68 4.85 32.58 136.11
wave 128k 1694.87 9.62 0.00 1007.30 3.37 10.71 117.51 546.36
GPU
boat 0.82 0.35 0.47 0.00 0.00 0.00 0.00 0.00
buoy 0.87 0.35 0.52 0.00 0.00 0.00 0.00 0.00
drop 32k 14.30 0.35 0.00 7.03 0.45 0.10 1.24 5.13
drop 128k 23.50 0.34 0.00 10.71 0.41 0.14 1.75 10.15
wave 32k 15.28 0.36 0.00 7.26 0.99 0.12 1.32 5.23
wave 128k 25.71 0.36 0.00 11.21 1.42 0.32 2.01 10.39
wave 256k 34.39 0.37 0.00 16.45 1.18 0.54 2.55 13.30
wave 512k 54.84 0.36 0.00 27.76 1.04 0.81 2.97 21.90
wavegr 64k 18.79 0.39 0.00 9.48 1.18 0.18 1.64 5.92
the rigid bodies and the Thrust library for parallel op-
erations like sort or prefix sum. The CUDA version
used was 4.1. The size of the grid used throughout
the examples is set to 128x128 and we fix the time
step for each frame to ∆t = 16ms. For the boat and
buoy scenes, the particle coupling was deactivated to
allow us a better timing. For the same reason, for the
wave examples, the object coupling was deactivated.
The wavegr example is basically the same as the oth-
ers, a breaking wave generated from a breaking dam,
but in this case the rest of the domain is totally empty
as shown in Figure 2.
Although a direct comparison with (Chentanez
and M
¨
uller, 2010) would not be totally fair because
of the difference in the hardware and their lack of im-
plementation details, at least for the particle simula-
tion in CUDA, we think that our LBM-based hybrid
system is a great alternative up to the challenge for
real-time fluid simulations.
The hardware used has severely limited us. To en-
sure all the particles were reintroduced correctly with-
out loss mass and because the GTX280 had no sup-
port for float atomic operations, we had to separate
the reintroduction step in two kernels plus some other
Thrust powered operations; the particles are not di-
rectly reintroduced but gathered by the cells. These
additional operations add more time to the processing
of the particles than what it should be needed with
more modern hardware.
Nevertheless, we have shown that a coupling of
LBMSW with a particle system is feasible for higher-
detail fluid simulations. The particle system, how-
ever, is not limited to the ballistic version used in
here. While the coupling should be the same, i.e.,
generation and reintegration, TTL of particles and ac-
tive flag; the simulation and behaviour of the particles
can be defined alternatively. A CUDA implementa-
tion of SPH as in (Goswami et al., 2010) could be
easily adapted to our hybrid system and is part of fu-
ture work.
One limitation our system has, however, is the
sudden disappearance of particles due to high de-
manding simulations, i.e., more particles are needed
per frame than what is available. It will be interesting
to look at Level-Of-Detail techniques that allow to re-
lax this situation, if more particles than available are
needed, the ones actually being active could be rep-
resented with simpler primitives, grouping near par-
ticles, etc. Alternatively, it also would be worth in-
vesting in some technique that tries to prioritize the
preservation of visible particles, i.e., those that fall in
the actual view frustum.
Although we have not explained how the visual-
ization is done, the render of the fluid is based in tri-
angle meshes in OpenGL. This can provoke some mi-
nor visual artifacts in the dry-wet region boundaries,
which should also be considered.
Other future work also includes the use of a rigid
body simulation totally in the GPU, as well as im-
prove the detection conditions for breaking waves.
Other particle generation conditions should be further
researched to broaden the use of this method.
HybridParticleLatticeBoltzmannShallowWaterforInteractiveFluidSimulations
225

ACKNOWLEDGEMENTS
With the support of the Research Project TIN2010-
20590-C02-01 of the Spanish Government.
REFERENCES
Bailey, P., Myre, J., Walsh, S., Lilja, D., and Saar, M.
(2009). Accelerating lattice boltzmann fluid flow sim-
ulations using graphics processors. In International
Conference on Parallel Processing, pages 550 –557.
Chentanez, N. and M
¨
uller, M. (2010). Real-time simulation
of large bodies of water with small scale details. In
Proc. ACM SIGGRAPH/Eurographics Symposium on
Computer Animation (SCA), pages 197–206.
Cords, H. (2007). Mode-splitting for highly detailed, in-
teractive liquid simulation. In Proceedings of the
5th international conference on Computer graphics
and interactive techniques in Australia and Southeast
Asia, GRAPHITE ’07, pages 265–272, New York,
NY, USA. ACM.
Geveler, M., Ribbrock, D., G
¨
oddeke, D., and Turek, S.
(2010). Lattice-boltzmann simulation of the shallow-
water equations with fluid-structure interaction on
multi- and manycore processors. In Keller, R.,
Kramer, D., and Weiss, J.-P., editors, Facing the
multicore-challenge, pages 92–104. Springer-Verlag.
Goswami, P., Schlegel, P., Solenthaler, B., and Pajarola,
R. (2010). Interactive SPH simulation and ren-
dering on the GPU. In Proceedings ACM SIG-
GRAPH/Eurographics Symposium on Computer An-
imation, pages 55–64.
He, X. and Luo, L. S. (1997). Theory of the lattice Boltz-
mann method: From the Boltzmann equation to the
lattice Boltzmann equation. Phys. Rev. E, 56:6811–
6817.
Hinsinger, D., Neyret, F., and Cani, M.-P. (2002). Interac-
tive animation of ocean waves. In Proceedings of the
2002 ACM SIGGRAPH/Eurographics symposium on
Computer animation, SCA ’02, pages 161–166, New
York, NY, USA. ACM.
Hou, S., Sterling, J., Chen, S., and Doolen, G. D. (1996). A
Lattice Boltzmann Subgrid Model for High Reynolds
Number Flows. Fields Institute Communications,
6:151–166.
Kass, M. and Miller, G. (1990). Rapid, stable fluid dynam-
ics for computer graphics. In Proceedings of the 17th
annual conference on Computer graphics and interac-
tive techniques, SIGGRAPH ’90, pages 49–57, New
York, NY, USA. ACM.
Layton, A. T. and van de Panne, M. (2002). A nu-
merically efficient and stable algorithm for animat-
ing water waves. The Visual Computer, 18:41–53.
10.1007/s003710100131.
Lee, H. and Han, S. (2010). Solving the shallow water
equations using 2d sph particles for interactive appli-
cations. The Visual Computer, 26:865–872.
Obrecht, C., Kuznik, F., Tourancheau, B., and Roux, J.-
J. (2011). A new approach to the lattice boltzmann
method for graphics processing units. Computers &
Mathematics with Applications, 61(12):3628 – 3638.
O’Brien, J. F. and Hodgins, J. K. (1995). Dynamic simula-
tion of splashing fluids. In Proceedings of the Com-
puter Animation, CA ’95, pages 198–. IEEE Com-
puter Society.
Qian, Y. H., D’Humi
`
eres, D., and Lallemand, P. (1992).
Lattice BGK models for Navier-Stokes equation. EPL
(Europhysics Letters), 17(6):479.
Salmon, R. (1999). The lattice boltzmann method as a ba-
sis for ocean circulation modeling. Journal of Marine
Research, 57(3):503–535.
Solenthaler, B., Bucher, P., Chentanez, N., M
¨
uller, M., and
Gross, M. (2011). SPH Based Shallow Water Simula-
tion. In Bender, J., Erleben, K., and Galin, E., editors,
VRIPHYS 11: 8th Workshop on Virtual Reality Inter-
actions and Physical Simulations, pages 39–46, Lyon,
France. Eurographics Association.
Tessendorf, J. (1999). Simulating ocean water. SIGGRAPH
course notes.
Th
¨
ommes, G., Sea
¨
ıd, M., and Banda, M. K. (2007). Lat-
tice boltzmann methods for shallow water flow appli-
cations. International Journal for Numerical Methods
in Fluids, 55(7):673–692.
Th
¨
urey, N. (2007). Physically based Animation of Free Sur-
face Flows with the Lattice Boltzmann Method. PhD
thesis, Dept. of Computer Science 10, University of
Erlangen-Nuremberg.
Th
¨
urey, N., M
¨
uller-Fischer, M., Schirm, S., and Gross, M.
(2007). Real-time breaking waves for shallow water
simulations. In Computer Graphics and Applications,
2007. PG ’07. 15th Pacific Conference on, pages 39
–46.
T
¨
olke, J. (2010). Implementation of a lattice boltzmann ker-
nel using the compute unified device architecture de-
veloped by nvidia. Computing and Visualization in
Science, 13:29–39. 10.1007/s00791-008-0120-2.
ˇ
St’ava, O., Bene
ˇ
s, B., Brisbin, M., and K
ˇ
riv
´
anek, J.
(2008). Interactive terrain modeling using hydraulic
erosion. In Proceedings of the 2008 ACM SIG-
GRAPH/Eurographics Symposium on Computer An-
imation, SCA ’08, pages 201–210, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Wei, X., Li, W., Mueller, K., and Kaufman, A. (2004). The
lattice-boltzmann method for simulating gaseous phe-
nomena. Visualization and Computer Graphics, IEEE
Transactions on, 10(2):164 –176.
Yuksel, C., House, D. H., and Keyser, J. (2007). Wave par-
ticles. ACM Trans. Graph., 26(3).
Zhou, J. G. (2004). Lattice Boltzmann Methods for Shallow
Water Flows. Springer.
Zhou, J. G. (2011). Enhancement of the labswe for shal-
low water flows. Journal of Computational Physics,
230(2):394 – 401.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
226
