
Dual-mode Detection for Foreground Segmentation in Low-contrast
Video Images
Du-Ming Tsai and Wei-Yao Chiu
Department of Industrial Engineering and Management, Yuan-Ze University, Taiwan, Taiwan
Keywords: Background Updating, Foreground Segmentation, Object Detection, Mode Estimation.
Abstract: In video surveillance, the detection of foreground objects in an image sequence from a still camera is critical
for object tracking, activity recognition, and behavior understanding. In this paper, a dual-mode scheme for
foreground segmentation is proposed. The mode is based on the most frequently occurring gray level of
observed consecutive image frames, and is used to represent the background in the scene. In order to
accommodate the dynamic changes of a background, the proposed method uses a dual-mode model for
background representation. The dual-mode model can represent two main states of the background and
detect a more complete silhouette of the foreground object in the dynamic background. The proposed
method can promptly calculate the exact gray-level mode of individual pixels in image sequences by simply
dropping the last image frame and adding the current image in an observed period. The comparative
evaluation of foreground segmentation methods is performed on the Microsoft’s Wallflower dataset. The
results show that the proposed method can quickly respond to illumination changes and well extract
foreground objects in a low-contrast background.
1 INTRODUCTION
In video surveillance, foreground object
segmentation is very important for the success of
object tracking, incident detection, activity
recognition, and behavior understanding. The
complete silhouette of a segmented object can
provide more detail about posture and position.
General video surveillance systems should be robust
to any changes of indoor/outdoor environments or
lighting conditions. For the widely-used background
updating models with a single Gaussian or a mixture
of Gaussians, the main idea is based on the gray-
level mean and the variance of each pixel in the
background image sequence. When the background
is represented by the mean pixel value for each pixel
over a short period of time in the image sequence, it
fails to detect a camouflaged foreground object
against a low-contrast background or a moving
object under sudden illumination changes of the
observed scene because the mean value is inevitably
disturbed by noise and outliers in the scene. If the
outlier is a low-contrast background or a sudden
illumination change, the mean value will be pulled
closer to the value of the outlier. Thus, the mean
background model cannot detect the low-contrast
object and respond to sudden light changes. In this
paper, we propose a mode-based background
modeling method for foreground segmentation. It is
well suited for scenes with under-exposure,
variations in lighting and low-contrast objects. The
proposed method can quickly calculate the exact
gray-level modes of individual pixels in the image
sequence by simply deleting the last image scene
and adding the current image scene into the image
sequence. It therefore involves only two arithmetic
operations to update the intensity statistics,
regardless of the number of consecutive image
frames. In order to accommodate dynamic changes
in a background, the proposed method uses a dual-
mode model, instead of a single-mode model, for
background representation.
2 DUAL-MODE BACKGROUND
MODEL
2.1 Single-mode Background Modeling
In a surveillance system, the background needs to
promptly respond to changes and resist noise in the
431
Tsai D. and Chiu W..
Dual-mode Detection for Foreground Segmentation in Low-contrast Video Images.
DOI: 10.5220/0004216004310435
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 431-435
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

environment. Mode detection assumes that the
number of image frames of the background is larger
than that of the foreground in a fixed duration of
observed frames.
Let
1,,1,,,,
NTTTtyxfyx
tT
F
be a
series of N consecutive image frames, where T
denotes the current time frame and
yxf
t
, the
gray-level of a pixel at coordinates
yx, in image
frame t. The single-mode background model is given
by
zyxzhyxM
T
st
T
z
,]),([maxarg,
1
1
1
F
(1)
where
]),([
1
yxzh
T
F
Frequency of gray level z at pixel
location (x, y) in
).,(
1
yx
T
F
The gray-level mode background modeling
formulas in eq. (1) involve one parameter value, the
number of image frames N, to be determined. This
value could be equivalent to the learning rate α in
the Gaussian mixture model that must be determined
beforehand. A very small number of N produces a
fast update of the background statistics. The mode
yxM
T
, obtained from a small N can then be
interpreted as a short-term background. It can
quickly absorb non-stationary background objects
such as a moving chair and opening/closing of a
curtain as parts of the background. It is therefore
very responsive to dynamic changes in the
environment. In contrast, a very large number of N
produces a slow update of the background statistics.
The mode
yxM
T
, obtained from a large N can be
considered as a long-term background. It can extract
more accurate silhouette of a moving object.
2.2 Dual-mode Background Modeling
In a surveillance system, a complex environment
sometimes has repeated dynamic interference in the
scene. The single mode model may not be able to
handle a dynamic background with only one
background image. For example, two gray levels of
a pixel may present the open/closed states of an
automatic door. The single mode background can
indicate only one of the two states of the door.
Therefore, we propose a dual-mode background
model for detecting foreground objects in a dynamic
background.
Denote by
yxM
st
T
,
1
1
and
yxM
nd
T
,
2
1
the first
and the second modes, i.e., the largest and the
second largest frequencies of occurrence, in an
observed duration. The formulas for calculating the
first and the second modes are, thus, given by
zyxzhyxM
T
st
T
,]),([maxarg,
1
1
1
F
yxMzyxzhyxM
st
TT
nd
T
,,]),([maxarg,
1
11
2
1
F
where
]),([
1
yxzh
T
F
Frequency of gray level z at pixel
location (x, y) in
).,(
1
yx
T
F
),(
1
1
yx
st
T
D
and
),(
1
1
yx
st
D
T
are the mean and
standard deviations of the distance
yxD
T
,
1
with
respect to the first mode
yxM
st
T
,
1
1
for all N image
frames, which are adaptively updated with
yxM
st
T
,
1
1
at the current time frame T. Likewise,
statistics
),(
2
1
yx
nd
T
D
and
),(
2
1
yx
nd
D
T
are updated
with respect to the second mode
yxM
nd
T
,
2
1
. The
foreground detection results are represented as two
binary images,
yxB
nd
T
,
1
and
yxB
nd
T
,
2
, for the
dual-mode backgrounds
yxM
st
T
,
1
1
and
yxM
nd
T
,
2
1
, where
otherwise,0
),(),(,,, 1
,
111
1
111
yxKyxyxMyxfif
yxB
st
D
st
D
st
T
st
T
TTT
and
otherwise,0
),(),(,,, 1
,
222
2
111
yxKyxyxMyxfif
yxB
nd
D
nd
D
nd
T
nd
T
TTT
The union of the two binary images
yxB
st
T
,
1
and
yxB
nd
T
,
2
is given by
yxB
dual
T
,
, where
otherwisebackground
BandBifforeground
yxB
ndst
dual
TT
T
),(0
11),(1
,
21
The pixel (x, y) is identified as a foreground point
only if it is a foreground point with respect to both
background modes
yxM
st
T
,
1
1
and
yxM
nd
T
,
2
1
.
The dual-mode background model allows the
background pixels with repeated changes of two
gray-levels. When the background pixel is static
over the entire observed duration, the two estimated
modes will converge into a single one. Therefore,
the dual-mode model can be used to represent a
background with static and dynamic changes of gray
levels.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
432
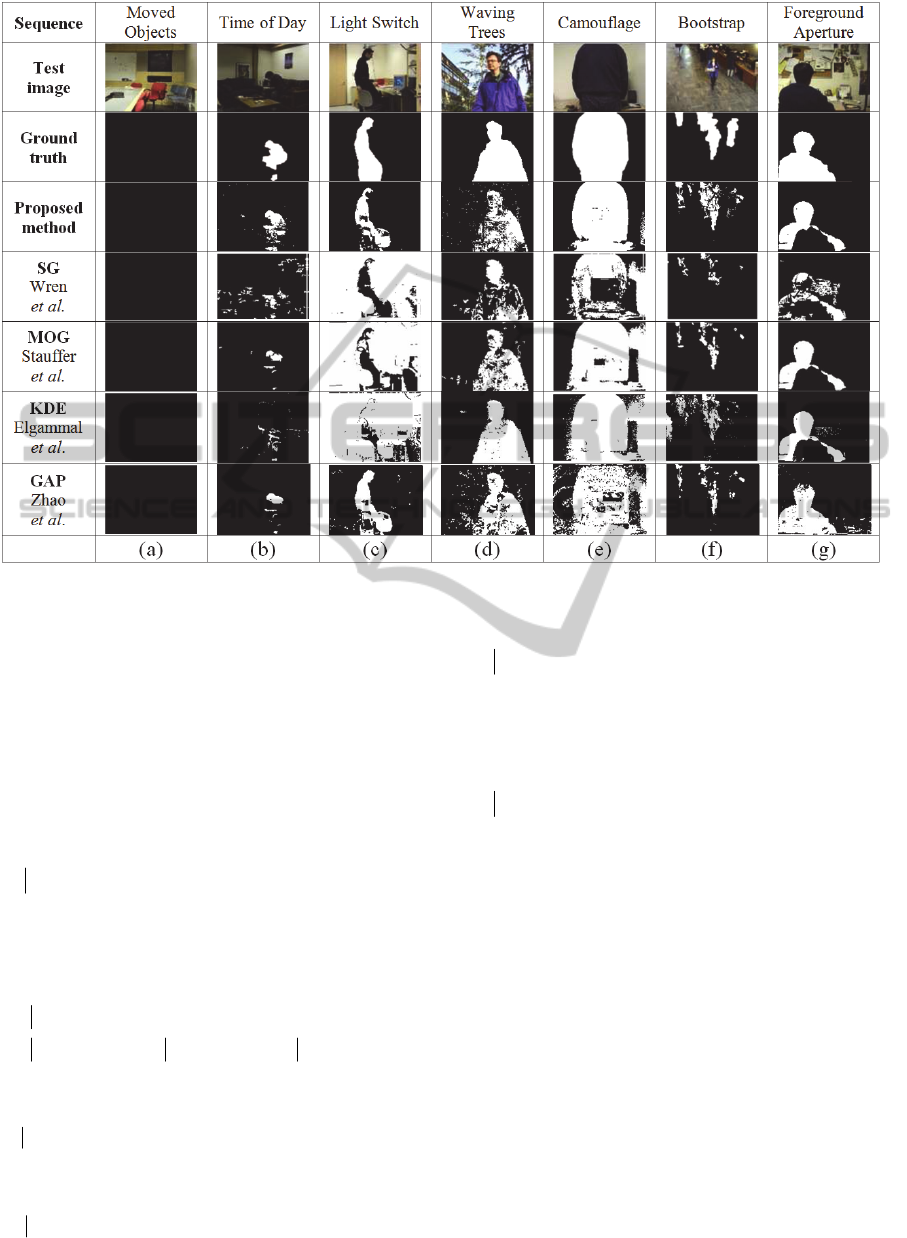
Figure 1: Comparative results of foreground segmentation methods on the Microsoft’s Wallflower dataset.
2.3 Fast Updating of Dual-mode
Background
The updating of the mode in each new image frame
using Eq. (1) is computationally expensive. In this
study, we propose a fast computation of the mode by
updating the frequency of image frames without
recounting all N image frames. Once the foreground
objects in image frame
),( yxf
T
have been
segmented from the background, the frequency
]),([
1
yxzh
T
F
at the current time frame T can be
quickly updated by deleting the presence of gray
level z in the last frame
NT
and adding the
presence of gray level z in the current image frame
T. That is,
,,),(
),(
1
yxfzhyxfzhyxzh
yxzh
TNTT
T
F
F
(2)
where
),( otherwise,0
,in ,at present is levelgray if,1
),(
zyxf
yxfyxz
yxfzh
T
T
T
and
otherwise ,0
frame in time , if ,1
,
NTzyxf
yxfzh
NT
NT
The frequency of observed N image frames
),( yxzh
T
F
can be updated by only two
arithmetic operations, regardless of the number of
consecutive image frames N. The first and second
modes
yxM
st
T
,
1
and
yxM
nd
T
,
2
at current time
frame T can then be updated from the frequency
),( yxzh
T
F
.
3 EXPERIMENTAL RESULTS
This section presents the experimental results from
Microsoft’s Wallflower dataset (Toyama et al.,
1999) for the performance evaluation and the
surveillance scenarios with low-contrast scenes to
demonstrate the effectiveness of the proposed dual-
mode model. The proposed algorithms were
implemented using the C++ language and run on an
INTEL Core2 2.53GHz 2046 MB personal
computer. The test images in the experiments were
160120
pixels wide with 8-bit gray levels. The
computation time per frame of size
160120
was
0.0065 seconds (i.e., 153 fps).
The Microsoft’s Wallflower dataset, containing
seven scenarios of image sequences, is used as the
Dual-modeDetectionforForegroundSegmentationinLow-contrastVideoImages
433
benchmark for comparison. Each sequence shows a
different type of challenge to foreground
segmentation applications. The Wallflower dataset
also provides a hand-segmented ground truth for
evaluation.
Figure 1 shows the comparative results on the
Microsoft benchmark dataset.
The experiment results show that the proposed
method has overall the best performance on the
Microsoft’s Wallflower dataset, as seen in Figure 1.
In terms of the capability for detecting low-contrast
objects, the experimental results of the “Time-of-
Day” video sequence in the Wallflower dataset show
that the proposed dual-mode method significantly
outperforms the GAP method as seen in column (b)
in Figure 1. In terms of computational efficiency, the
GAP method is computationally very expensive. It
takes 25 seconds to process just an image frame of
size 160×120. It can only be used for off-line
applications, such as video retrieval.
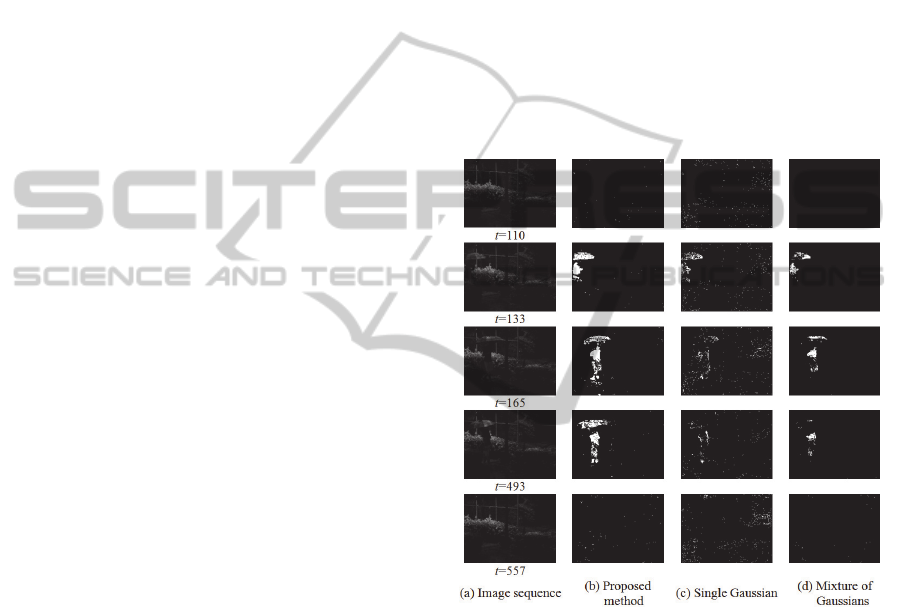
The outdoor scenario entails monitoring of a
parking lot, in which a person with an umbrella
passes a clump of bushes and a light pole on a dark,
rainy night. The path is poorly lit and the man is
hardly observable. Rain and wind produce dynamic
changes in the background. The image sequence is
also influenced by the rain in the environment. The
video sequence was filmed at 15 fps. The first
column (a) of Figure 2 shows the original video
sequence at varying time frames. The proposed
foreground segmentation scheme can effectively
extract the person under the very low-contrast
background, as seen in the second column (b) of
Figure 2. The detection results from the single
Gaussian model are presented in the third column (c)
of Figure 2. That model failed to detect the low-
contrast person against the noisy background. The
last column (d) of Figure 5 presents the detection
results from the Gaussian mixture model. This
column shows that the mixture of Gaussians model
was robust to the noise of moving foliage and rain in
the background. However, the foot of the person and
the umbrella were mis-detected, and the shape is not
complete.
4 CONCLUSIONS
In this paper, we have presented a dual-Mode model
for foreground detection from a static camera. It
detects the most frequently occurring gray level of
each pixel, instead of the mean, in the image
sequence. It can quickly respond to changes in
illumination and accurately extract foreground
objects against a low-contrast background. The
variance of gray-level distance between pixel value
and mode indicates the degree of scene changes. The
dual-mode model can handle noise and repetitive
movements such as an opening and closing door and
flashes on a monitor. It can accurately extract the
silhouette of a foreground object in a low-contrast
scene, and it is very responsive to both gradual and
radical changes in the environment. A process frame
rate of 153 fps can be achieved for images of size
160120
on an INTEL Core2 2.53GHz 2046 MB
personal computer. Experimental results have
revealed that the proposed method can be applied to
monitoring of both indoor and outdoor scenarios
with under-exposed environments and low-contrast
foreground objects.
Figure 2: Experimental results of an outdoor parking lot
on a rainy night: (a) discrete scene images in a video
sequence filmed at 15 fps; (b) detected foreground objects
from the proposed method; (c) detection results from the
single Gaussian model; (d) detection results from the
Gaussian mixture model. (The symbol t indicates the
frame number in the sequence).
REFERENCES
Toyama K, Krumm J, Brumitt B, Meyers B. 1999,
Wallflower: Principles and practice of background
maintenance. Inter Conf on Computer Vision 1999:
255-261, Corfu, Greece, September.
Wren, C. R., Azarbayejani, A., Darrell, T., Pentland, A. P.,
1997, Pfinder: real-time tracking of the human body,
IEEE Trans. Pattern Analysis and Machine
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
434

Intelligence, 19 (7), pp. 780-785.
Stauffer, C., Grimson, W. E. L., 2000, Learning patterns
of activity using real-time tracking, IEEE Trans.
Pattern Analysis and Machine Intelligence, 22 (8), pp.
747-757.
Elgammal, A., Duraiswami, R., Davis, L., 2003, Efficient
kernel density estimation using the Fast Gauss
Transform with applications to color modeling and
tracking, IEEE Trans. Pattern Analysis and Machine
Intelligence, 25 (11), pp. 1499-1504.
Zhao, X., Satoh, Y., Takauji, H., Kaneko, S., Iwata, K.,
Ozaki, R., 2011, Object detection based on a robust
and accurate statistical multi-point-pair model, Pattern
Recognition, 44(6), pp. 1296-1311.
Dual-modeDetectionforForegroundSegmentationinLow-contrastVideoImages
435
