
Information System for Autonomous Mobile Robot Interaction
Position Paper
Nadina Battagliotti, Daniela L´opez De Luise and Jin Sung Park
AIGrouo, Palermo University, Mario Bravo 1050, Buenos Aires, Argentine
Keywords:
Mobile Robots, Distributed Information Systems, Distributed Self-organizing Maps, Computational Intelli-
gence.
Abstract:
This paper presents what the authors consider to be a new distributed memory architecture for self-organizing
distributed systems. The work in progress presented here focuses on the representation of a distributedmemory
for multi-robot systems. It states the main characteristics of a shared environment and provides suitable
interfaces to allow autonomous mobile robots to query, publish and exchange relevant information without
requiring a central data storage. The memory is based on a combination of fuzzy systems, distributed Self-
Organizing Maps (SOM), a new specific design information handshake between robots and a new model for
approach for world-map global administration.
1 INTRODUCTION
This paper describes a proposal to solve the problem
of allocation of different types of services to a set
of heterogeneuos autonomous nobile robots. Multi-
robot solutions have been gaining popularity with the
development of cooperative strategies and enhanced
communication technologies but also due to the new
advances towards the internet of the future. Multi-
robot systems offer various advantages against single-
robot solutions because of the distributed character
that allows for parallel processing and robustness
thanks to the redundancy. Lot of work has been done
in cooperative robot systems, like in localization, for-
mation control, cooperativetransport and sensing, etc.
(Boella G., 2003) (Findler, N.V., 1995) (Findler, N.V.,
2005) (Jennings, N., 1995)(Maza, I., 2005)(Hachour,
O., 2008)(Dillmann, R., 1995)
One important topic when dealing with multi-
robot systems is the knowledge representation, which
can be global (collective awareness of a whole robot
team) or local (awareness of each individual mem-
ber). In centralized systems, the implementation of
a global memory can require lots of resources. Be-
sides, centralized systems are prone to total failure
if the central processing unit fails. Distributed sys-
tems on the other hand are more robust due to the
redundant character of those architectures allowing
an individual unit to get the role of another unit that
has broken down. Nevertheless, a fully distributed
system presents a high complexity and is more dif-
ficult to manage than a centralized one. This brings
along the need for an advanced memory representa-
tion that combines the advantages of both approaches
distributed and centralized. The implementation of
such memory requires not only the definition of soft-
ware architecture but also the specification of hard-
ware requirements regarding communicationbetween
the individual entities in the whole system. The sys-
tems knowledge should also be shared with human
users that can interact with the system via sponta-
neous connection using a smart phone. For scalabil-
ity, an information exchange between systems should
also be made possible. The field of Computational
Intelligence offers various concepts and tools to de-
velop a suitable approach to the presented situation.
Following is an overview of the current Soft Comput-
ing alternatives in the field.
Neural Networks are used for a variety of appli-
cations from speech processing, vision, optimization,
communications, classification activities, control sys-
tems, associative memories, etc (Simencio, E., 1992).
In all the cases the network is made of a set of process-
ing units (neurons) connected to others via links. The
links have different strengths according to the knowl-
edge acquired by the neurons. Every neuron has a
vector of links usually named as weight vector. Most
of Neural Networks require a training set to internal-
ize the patterns of the problem. During the learning
process, the desired outputs are compared to the cur-
376
Battagliotti N., López De Luise D. and Park J..
Information System for Autonomous Mobile Robot Interaction - Position Paper.
DOI: 10.5220/0004222403760382
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 376-382
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

rent outputs. If there is any difference between them,
the internal weights are iteratively changed accord-
ing to certain learning algorithms. The process stops
when a convergence criterion is met.
The number of neurons, its disposition into lay-
ers, the way they are interconnected, the approach
used to update weights and the mechanism by which
a neuron forwards its knowledge to another neurons
conform the architecture of the network. The archi-
tecture determines its velocity and precision (Wilson,
W., 1993).
But in certain architectures it is possible to let the
network learn in a competitive fashion. Competitive
learning is a rule based on the idea that only one neu-
ron from a given iteration in a given layer will fire at
a time. These types of networks are known as self-
organizing networks. In this case the current input is
compared to the weight vectors of the neurons and the
closest vectors determine the winning neuron (Koho-
nen, T., 1991).
The Kohonen’s Self-Organizing Maps (SOM) is
probablythe most relevant competitivenetwork archi-
tecture. It has been used successfully in many prob-
lems such as automatic speech recognition (Behme,
H., 1993), clinical voice analysis (Godino-Llorente,
J., 2000) (Hiltunen, T., 1993), etc. Specifically in the
robotic field it is intensively used in many problems
like robot navigation (Hu, H., 2000), cloud classifi-
cation from satellite images (Kilpatrick, D., 1995),
kinematic of a robot arm (Kieffer, S., 1991), adap-
tive controller for autonomous mobile robots (Kim,
Y., 1992), robot motion planning in dynamic envi-
ronments (Knobbe, A., 1995), spatial understand-
ing and temporal correlation for mobile robot (Kr-
ishna, K., 2000), etc. This project uses an exten-
sion of the SOM named Distributed Self-Organizing
Map (DSOM) where NN is trained using decentral-
ized learning. There are many DSOM implementa-
tion approaches(Pascual-Marqui,A., 2001) (Lobo, V.,
1998) and applications in this field (?). In (Lobo, V.,
1998) it is applied with the sonar noise to detect the
shape of a navy. In the context of this project, it is also
used for obstacle recognition. But the information
comes from different types of sensors that feeds asyn-
chronously even for the same object. This requires a
redesign of parts of the original DSOM model to let it
aggregate patterns from partial, noisy and incomplete
data of the obstacle.
Regarding the world map, the area is segmented
into portions. Boundaries between those segments
are not sharp but can be fuzzy. Fuzzy logic (FL) has
been successfully used to solve many complex prob-
lems. It is inherently robust, can be modified and
tweaked easily to improve the system performance
and can control nonlinear systems (Cox, E., 1992)
(Lee, C., 1990). In general, FL is used in many ap-
plications where noise, error and missing data is typ-
ical, mainly in control theory and artificial intelli-
gence. Among other applications are wireless com-
munications (Erman, M., 2009), velocity induction
for a motor (Kumar, V., 2005), operational meteorol-
ogy (Murtha, J., 1995), data mining and Information
Retrieval(Meunier, B., 2007), etc. This project pro-
poses a new FL usage in the world map segment ad-
ministration. Although it has been used in philoso-
phy (Kosko, B., 1993) and psychology (Didelon, C.,
1991) for evaluating the individual usage and charac-
teristics of its cognitive maps (or interpretative maps),
the approach to manage segments of a robots world-
map is a contribution in the field. In the context of this
work, FL is important to guarantee the proper control
of the robot during the migration from one segment
to another in the map. If the services provided by the
robot or its abilities are critical, the fuzzy boundaries
allow the system to take a period of time to adapt the
current activity softly.
This article is organized as follows: Section 2
describes the proposed architecture for a distributed
memory. Later in 3, the proposed information ap-
proach is presented. Section 4 describes the software
that is used in this work. Conclusions and future work
are presented in 5.
2 PROPOSED ARCHITECTURE
2.1 Global Description
Fig. 1 shows the proposed global system architec-
ture. The physical workspace covered by the system
is logically split into segments (S
i
). Every partition
has a Logical Central Point (LCP) that regulates the
activity of the agents within S. It can also handle a
local world map and define its boundaries. A team
of autonomous robots is constantly providing services
within each segment. Any robot is able to perform a
set of different services. To do so, it can download
from the LCP the service that it should provide and
the corresponding hardware configuration required to
perform these services. It can also upload its sensory
data to its corresponding LCP.
2.2 Logical Central Point
A Logical Central Point (LCP) is a logical role that
behaves as the manager of a segment S. A LCP can
be any data processing unit, for example a desktop
computer of a processor mounted on a robot. Custom
InformationSystemforAutonomousMobileRobotInteraction-PositionPaper
377
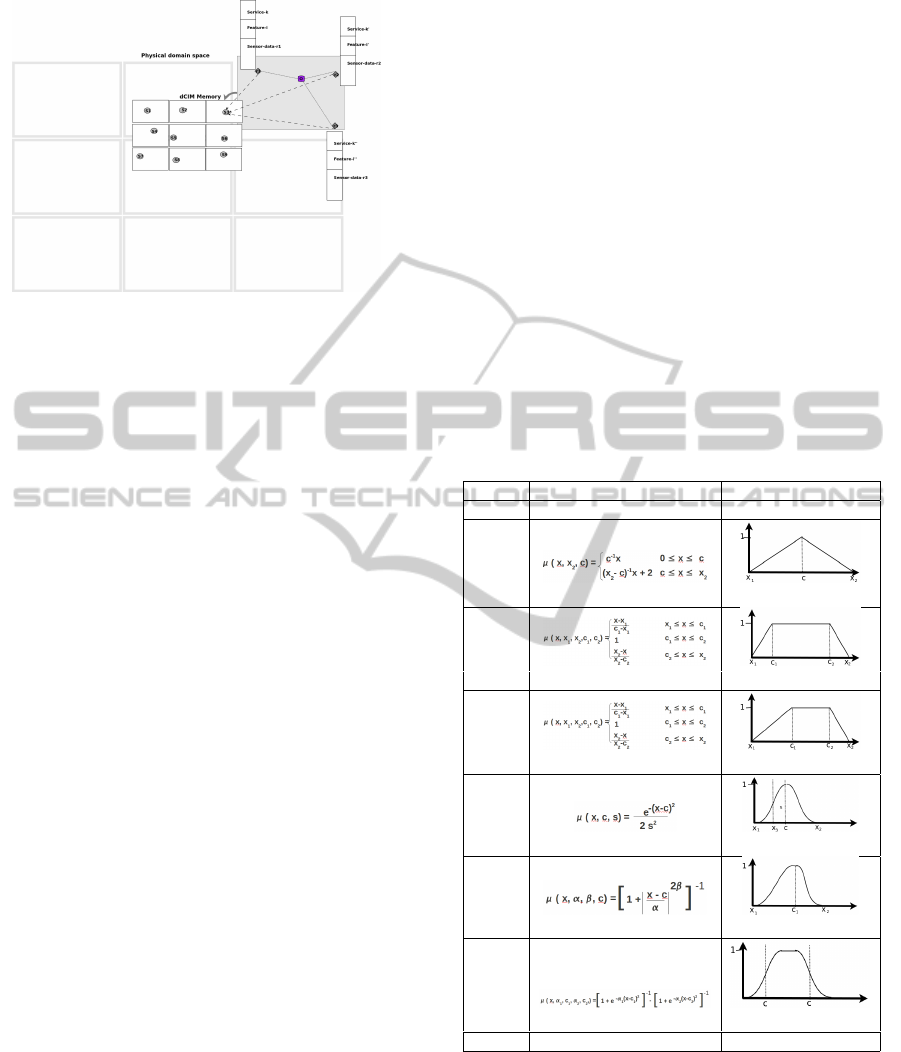
Figure 1: Representation of the proposed global architec-
ture.
services are physically located and associated to one
or more LCP. The activity of any LCP can be:
• Manage shared information with other LCPs us-
ing a specific LCP-LCP handshake.
• Manage information of the robots in its segment S
using a specific LCP-robot handshake.
• Work as a petition center.
• Work as a passive receiver of service requests
from another LCP.
• Manage local storage block to be able to make in-
ferences and command fast actions to the robots
in S.
• Allocate robots to service petitions.
• Request robots to other LCPs.
• Send robots to other segments upon a request from
other LCP.
• Delegate its role to other unit.
• Make a robot to change its service.
• Make a robot to change its hardware configuration
(sending it to a specific LCP whose segment is
advocated to this tasks).
• Manage a distributed world-map updated with the
information received from the robots in S.
To perform its activity, LCP has a local storage
with information like:
• ID and service of each robot within its segment.
• Number of robots in its corresponding segment S
i
.
• Local world map defined as a set of cells, each
representing a physical area.
• The boundaries of S
i
.
In this approach, every world map remains private
for its corresponding LCP. Each segments boundary
is defined by:
• Border section
• ID of the neighborthat shares everyborder section
• Border strength
The border strength is defined in terms of a fuzziness
function. For example, in Fig. 1, the neighbors of S1
are:
• S2: with border S1-2 and fuzziness = 0 (i.e. no
fuzziness)
• S4: with border S1-4 and fuzziness = 5 (fuzziness
with member function 5)
• S5: with border S1-5 and fuzziness = 3 (fuzziness
with member function 3)
In this context, the boundary is one or more borders.
And a border is a set of cells of the local world map.
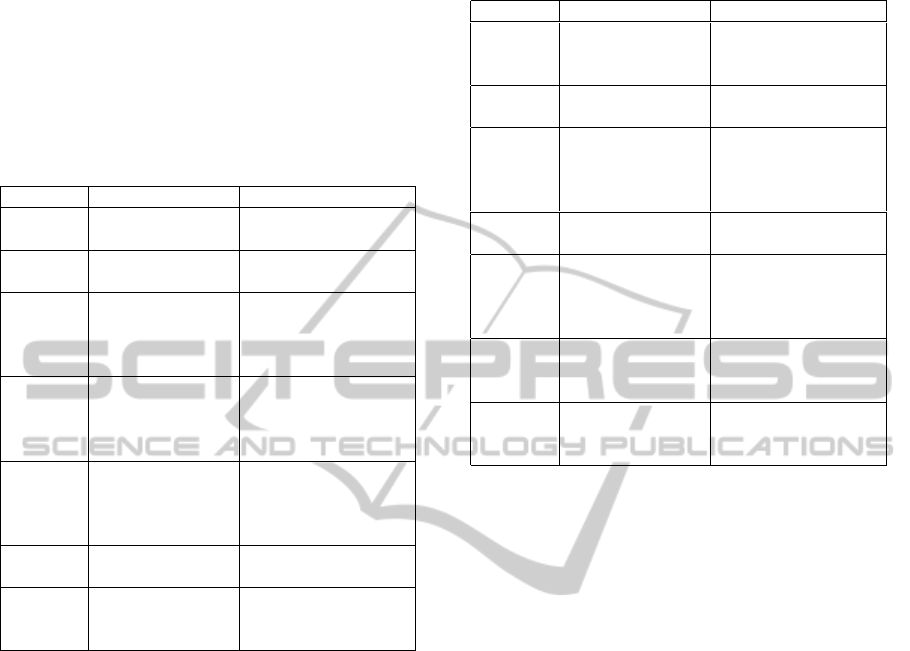
In all cases, fuzziness refers to a number of a pre-
defined member function. Table 1 is an example of
functions that are classical in the field.
Table 1: Classical membership functions.
ID Membership formula Shape
0 None None
1
triangular
2
trapezium
3
trapezoid
4
normalized gaussian
5
generalized bell
6
2 sigmoidals
7 ... ...
The membership function shape is very important
to define the transition behavior when a robot trespass
the boundaries of the current segment. Among others,
it defines:
• if the Membership Function is Symmetric: the
LCP consumes the same period of time to get
ready to delegate the robot and to release the robot
to the target LCP (see Fig. 2).
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
378

Figure 2: Fuzzy border trespassing.
• if the Membership Function is Asymmetric: the
LCP requires different amount of time to prepare
the robot delegation and to release the robot.
• if there is no Membership Function: the original
LCP delegates the navigation and control of the
robot instantly to the target LCP.
The strength of the border can also be understood
not only as the ability but also as the disposition of
the current LCP to allow a robot to pass-through that
segment of the boundary.
2.3 World Map
A world map is a representation of the internal in-
formation of a segment. As the LCP receives infor-
mation via handshaking with the robots within its as-
signed segment, the current information about obsta-
cles and robots positions in the world map gets con-
stantly updated.
By using the concept of Distributed Self Orga-
nized Maps (DSOM) the LCP is able to recognize
known obstacles from asynchronous and partial in-
formation gathered from the robots in the current seg-
ment. Although by definition, the SOM is intended to
classify data into known categories (e.g. types of ob-
jects), it was also demonstrated (Lobo, V., 1998) that
DSOMs are able to recognize new objects.
A world map is a small part of the global
workspace, because it is intended to model just the
physical space covered by a given segment S
i
(and
managed by the corresponding LCP).
2.4 Robot Distribution
Robots are assigned groups to segments handled by
LCPs. Every robot can only belong to a segment.
When a LCP detects an increase in the workload (e.g.
because the robots have many service requirements,
or because the LCP itself has received many queries
from a terminal operator), it can negotiate with the
nearest LCPs to get additional robots.
Conversely, a LCP can receive from its neighbors
a request for borrowing one or more robots from its
segment. Then it will decide whether to accept or not
those requests according to its current own workload.
We assume that each robot is able to navigate
autonomously within its segment with a predefined
collision-avoidance function and that a robot will
never cross the boundaries defined in the LCP world-
map. The LCP will monitor the states of its robots to
improve their collision-avoidance algorithms and so
prevent deadlocks and critical situations.
While executing a service, a robot simultaneously
keeps sampling its environment so its LCP can update
its world map. It also sends a fragment of this infor-
mation to the closest robots in the same area.
If there is a dynamic obstacle within a segment,
then one or more robots will detect its presence and
forward it to its LCP and closest robots. All this in-
formation is used by the LCP to recognize the type
of obstacle (by using the DSOM). The LCP can also
inform to another neighbor LCP that the obstacle is
about to enter to its area and provide obstacle data
(i.e. velocity, shape, type and last known position).
Upon request, the LCP can reassign a robot a new
service. If the robot hardware features necessary to
provide the new service require human intervention
(for instance to exchange a tool, remove or add a
wheel, add a new hardware module, etc.), the LCP
can command the robot to trespass the boundary of
the current segment and pass to a special maintenance
segment. After the robot has its physical configu-
ration changed, it updates its internal status, returns
to its former segment and follows the LCP indication
to perform the new service. This can also imply the
robot being transferred to a new segment.
3 INFORMATION APPROACH
Each robot uses a negotiation with its neighbors. Dur-
ing that negotiation, it shares a reduced amount of in-
formation (only with its neighbors). The approach is
similar to that used in the computer networks to solve
the problem of routing information from a source to
target. But in this proposal the data being routed con-
sists of a bunch of information required to acknowl-
edge the features of the surroundings.
Below there is a comparison between the typ-
ical activity of a router and the Distributed robot
Handshaking Approach (DHA)
1
. Table 2 shows
the features taken from the router approach that we
adapted for robot-to-robothandshaking. While within
a router, data packets are exchanged, in the DHA, this
occurs with sampling data from the robots sensors.
Each robot in the DHA is analog to a node in a routing
1
It is mentioned in section it is mentioned in section Fu-
ture Work as number 15
InformationSystemforAutonomousMobileRobotInteraction-PositionPaper
379
scheme. The difference is that in the router scheme,
the destination node can be each node in the network,
while in the DHA, the destination node can only be
a neighbor node. Furthermore, contrary to the router
approach, the DHA considers every LCP storing up-
date information about the environment; within the
router approach, a table of routings is stored.
Table 2: Features extracted from router approach for robot-
to-robot handshaking.
Feature Router DHA
Content Data packets Current sampling
changes
Source A node calling
another
The robot that is
sampling
Target The destination
candidates (can
be more than
one)
The robots that are
closest
Feed-
back
Navigation status
of each candidate
Sampling changes of
each closest robots
(when keep being
closer)
Activity Select best desti-
nation using the
feed-back from
every candidate
Select best destina-
tion using the feed-
back from every can-
didate
Storage Table of routings Current cells and sur-
roundings cells
2
Updating
process
Upon every
network configu-
ration change
3
Upon every physical
change in the land
that is being detected
Something similar is implemented between LCP
and robots. The information exchanged is reduced to
allow the LCP to manage a number of robots properly,
as in Table 3. In this case, in the DHA, the source is
given by the LCP itself. Whereas every robot inside
the LCPs segment can communicate with the LCP, in
the handshake, only the robots that are capable to per-
form the task in question are considered targets. In
this handshaking, the information stored is given by
the current set of tickets (queries) and services being
performed by the robot.
The handshake between two LCPs is defined as in
Table 4.
This handshaking is analog to that for robot-to-
robot communication. In this case, only neighbor
LCPs can be set as targets. The information to be ex-
changed here is represented by the global changes in
the environment affecting more than one LCP. Addi-
tionally, information about tickets under negotiation
and about robot sharing is also exchanged.
Table 3: Features extracted from router approach for robot-
to-robot handshaking.
Feature Router DHA
Content Data packets Current world-map
changes of interest
for the robot
Source A node calling
another
The LCP that has to
command a robot
Target The destination
candidates (can
be more than
one)
The robots that are
able to perform the
task
Feed-
back
Navigation status
of each candidate
Current status and
availability
Activity Select best desti-
nation using the
feed-back from
every candidate
Select the best robot
to accomplish the
task and afterwards
monitor it
Storage Table of routings Current tickets and
services being per-
formed by each robot
Updating
process
Upon every
network configu-
ration change
Upon every new
ticket or service
completion
4 SYSTEM REQUIREMENTS
4.1 Software
The software tools are mostly open, except for the
simulators required to test the functionality:
• Eclipse framework
• Java 2
• svn, subversion system
• Mantis, bug tracker
• LMS simulator
5 CONCLUSIONS AND FUTURE
WORK
There are many pending items for the project. Among
others the following items are to be refined yet:
1. The internal language (numeric or textual) to rep-
resent service features
2. The internal language (numeric or textual) to rep-
resent hardware features
3. The internal language (numeric or textual) to rep-
resent sampling information
4. Parameters to define the segments:
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
380
Table 4: Features extracted from a router approach for hand-
shaking between LCPs.
Feature Router DHA
Content Data packets Current global
changes that affects
more than one LCP.
Inter LCP ticket ne-
gotiation to provide
the services. Robots
sharing (between two
LCPs)t
Source A node calling
another
The LCP that has to
fulfill a request
Target The destination
candidates (can
be more than
one)
The neighbor LCPs
Feed-
back
Navigation status
of each candidate
Current status and
availability of the tar-
get LCPs
Activity Select best desti-
nation using the
feed-back from
every candidate
Select the best LCP
to share the task and
assign it
Storage Table of routings Current status and
services
Updating
process
Upon every
network configu-
ration change
Upon events
• if the boundaries are static or may change its
size and shape
• if the boundaries are fuzzy o sharp
• if the LCP defines its boundaries automatically
or it needs external information to know its
boundaries
5. Parameters for robot-central point handshake:
• LCP to robot: current service, hardware config-
uration
• Robot to LCP: sampling data
6. Parameters for the handshake between central
points (LCP).
7. Evaluate whether to implement traditional Koho-
nen’s SOM or Fuzzy c-Means (less computational
complexity).
8. The implementation of the logical central points
in one or more physical processor, and its real lo-
calization in the real world.
9. Define the approach to balance the resources dis-
tribution (resources are parts of robots, robots,
knowledge, parts of its world-maps, etc.)
10. Define the concept of closest robots: whether they
are all the robots within certain distance, or the
directly linked conceptually. It must be defined a
new metric to assess that.
11. Define if a LCP can be used as a petition centers
or it just receives petitions from a central point.
12. Define if traditional SOM or fuzzy c-means has to
be used.
13. Define the special segments. The hardware con-
figuration can be changed manually or using
robotics.
14. Define if there is just one special segment or
many. In the later case, the workload administra-
tion approach.
15. Define the contention algorithms between robots
to reduce their information storage and amount of
data to be interchanged.
16. Define the contention algorithms between a robot
and its LCP, to reduce their information storage
and amount of data to be interchanged.
17. Define the local robot memory updating approach.
18. Define the number of cells in the world-map that
corresponds to the surroundings term.
19. Define a hierarchy
20. Define roles & inter-role communication
21. Create a wiki to share and publish information
about the project, put the publications, etc
22. Evaluate the set of member functions according to
the service and hardware configurations.
23. Evaluate the shape and size of segments.
24. Evaluate the dynamic of changes in the bound-
aries of the segments.
25. Evaluate the proper set of fuzzy operators to work
with the fuzzy boundaries.
REFERENCES
Behme, H. (1993). Speech processing by hierarchical seg-
ment classification. In International Joint Conference
on Neural Networks. IEEE Press.
Boella, G.(2003). Norm governed multiagent systems: The
delegation of control to autonomous agents. In Proc.
of IEEE/WIC IAT. IEEE Press.
Cox, E. (1992). Fuzzy fundamentals. In IEEE Spectrum.
IEEE Press.
Didelon, C., de Ruffray, S. (1991). A world of interstices:
Fuzzy logic approach in the analysis of interpretative
maps. In The Cartographic Journal. British Carto-
graphic Society.
InformationSystemforAutonomousMobileRobotInteraction-PositionPaper
381

Dillmann, R., Kauser, M., Wallner, F., Weckesser, P. (1995).
Priamos: An advanced mobile system for service, in-
spection, and surveillance tasks. In Modelling and
planning for sensor based intellinget robot systems.
H. Bunke, T. Kanade, H. Noltemeirer Eds.
Erman, M., Mohammed, A. (2009). Fuzzy logic applica-
tions in wireless communications. In IFSA-EUSFLAT.
IFSA-EUSFLAT.
Findler, N.V. (1995). Multi-agent coordination and cooper-
ation in a distributed dynamic environment with lim-
ited resources. In Artificial Intelligence in Engineer-
ing. Elsevier.
Findler, N.V. (2005). A robust business resource manage-
ment framework based on a peer-to-peer infrastruc-
ture. In 7th IEEE Int. Conf. on E-Commerce. Kluwer
Academic.
Godino-Llorente, J. (2000). Non supervised neural net ap-
plied to the detection of voice impairment. In IEEE In-
ternational Conference on Acoustics, Speech and Sig-
nal Processing. IEEE Press.
Hachour, O. (2008). Path planning of Autonomous Mobile
robot. In Int. Journal of Systems Appl., Eng. & De-
velop.. University Press. Issue 4(2).
Hiltunen, T., Leinonen, L. (1993). Visualization and classi-
fication of voice quality with the self-organizing map.
In International Conference on Artificial Neural Net-
works. S. Gielen and B. Kappen.
Hu, H. (2000). Landmark-based navigation of industrial
mobile robots. University of Portsmouth, Portsmouth,
1st edition.
Jennings, N. (1995). Controlling cooperative problem solv-
ing in industrial multi-agent systems using joint inten-
tions. In Artificial Intelligence. Elsevier.
Kieffer, S., Morellas, S. (1991). Neural network learning
of the inverse kinematic relationships for a robot arm.
In International Conference on Robotics and Automa-
tion. IEEE Computer Society Press.
Kilpatrick, D. (1995). Unsupervised classification of
antarctic satellite imagery using kohonens self-
organizing feature map. In IEEE International Con-
ference on Neural Networks. IEEE Press.
Kim, Y. (1992). Robust adaptive control of an autonomous
mobile robot. In Second International Conference on
Automation, Robotics and Computer Vision. Nanyang
Technol. Univ.
Knobbe, A., Kok, J. (1995). Robot motion planning in un-
known environments using neural networks. In In-
ternational Conference on Artificial Neural Networks.
NParis : EC2 & Cie.
Kohonen, T. (1991). The self Organizing Map. IEEE Press,
New York, 1st edition.
Kosko, B. (1993). Fuzzy Thinking: The New Science of
Fuzzy Logic. Hyperion, New York, 1st edition.
Krishna, K. (2000). Spatial understanding and temporal
correlation for a mobile robot. In Spatial-Cognition-
and-Computation. Lawrence Erlbaum Associates Inc.
Kumar, V., Joshi, E.R. (2005). Hybrid controller based in-
telligent speed control of induction motor. In Journal
of Theoretical and Applied Information Technology.
Little Lion Scientific.
Lee, C. (1990). Fuzzy logic in control systems. In IEEE
Trans. on Systems, Man, and Cybernetics. IEEEPress.
Lobo, V., Bandeira, N. (1998). Ship recognition using dis-
tributed self organizing maps. In Neural Networks
Proceedings of the International Conference EANN
98. Systems Engineering Association.
Maza, I., Viguria, A., Ollero, A. (2005). Cooperacin
helicptero autnomo-robot mvil terrestre para aplica-
ciones de bsqueda y localizacin. In Proc. of I Con-
greso Espaol de Informtica. pp 109-116, Thomson,
Granada, Spain, 2005.
Meunier, B. (2007). Real-world fuzzy logic applications in
data mining and information retrievaly. In A Spectrum
of Theoretical and Practical Issues. Springer.
Murtha, J. (1995). Applications of fuzzy logic in opera-
tional meteorology. In Scientific Services and Pro-
fessional Development Newsletter. Canadian Forces
Weather Service.
Pascual-Marqui, A. , Pascual-Montano, K. (2001).
Smoothly distributed fuzzy c-means: a new self-
organing map. In Pattern Recognition. IEEE Press.
Simencio, E. (1992). Artificial Neural Networks. IEEE
Press, New York, 1st edition.
Wilson, W. (1993). A comparison of architectural alter-
natives for recurrent networks. In Fourth Australian
Conference on Neural Networks. Sydney University
Electrical Engineering.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
382
