
Studying Aviation Incidents by Agent-based Simulation and Analysis
A Case Study on a Runway Incursion Incident
Tibor Bosse and Nataliya M. Mogles
Vrije Universiteit Amsterdam, Agent Systems Research Group
de Boelelaan 1081, 1081 HV Amsterdam, The Netherlands
Keywords: Aviation, Incidents, Agent-based Simulation, Verification, Interlevel Relations.
Abstract: This paper introduces an agent-based approach to analyse the dynamics of accidents and incidents in
aviation. The approach makes use of agent-based simulation on the one hand, and of formal verification of
dynamic properties on the other hand. The simulation part enables the analyst to explore various
hypothetical scenarios under different circumstances, with an emphasis on error related to human factors.
The formal verification part enables the analyst to identify scenarios involving potential hazards, and to
relate those hazards (via so-called interlevel relations) to inadequate behaviour on the level of individual
agents. The approach is illustrated by means of a case study on a runway incursion incident, and a number
of advantages with respect to the current state-of-the-art are discussed.
1 INTRODUCTION
On May 31, 2009, Air France flight 447 disappeared
somewhere over the Atlantic Ocean, during a route
from Rio de Janeiro to Paris. The crash was the
deadliest accident in the history of Air France,
killing all 228 people on board. Whilst currently still
under investigation, this accident seems to have been
the consequence of a rare combination of factors,
like inconsistent airspeed sensor readings, the disen-
gagement of the autopilot, and the pilot pulling the
nose of the plane back despite stall warnings
1
.
This example illustrates an important problem in
the analysis of accidents and incidents in aviation:
even if detailed flight data from the ‘black box’ are
available, it is usually difficult to come up with a
clear analysis, because the causes of incidents
cannot be attributed to a point of failure of one
individual entity. Instead, most incidents in aviation
are caused by a complex interplay of processes at
various levels of the socio-technical system.
The complexity of these processes (and their
interplay) poses some difficulties to existing
approaches for the analysis of aviation indicents.
Traditionally, such analyses are done via fault and
event trees, graphical representations of Boolean
logic relations between success and failure types of
1
http://en.wikipedia.org/wiki/Air_France_Flight_447
events. However, although widely used, there is an
increasing awareness that fault and event trees have
serious limitations, especially when it comes to
analysing dynamic systems with time-dependent
interactions (see Everdij (2004) for a more extensive
argumentation). More recently, alternative
approaches have been developed, such as FRAM
(Hollnagel, 2004) and STAMP (Leveson, 2004).
While these approaches have proved successful in
various case studies, they still have some drawbacks.
In particular, FRAM lacks a formal semantics,
which makes a computational analysis of complex
non-linear processes impossible. STAMP does have
a formal basis, but takes an aggregated,
organisational perspective (based on system
dynamics), which hinders an analysis at the level of
individual agents (such as pilots and air traffic
controllers), and their underlying mental processes.
As an alternative, the current paper presents an
approach for analysis of aviation incidents that takes
a multi-agent perspective, and is based on formal
methods. The approach is an extension of the
approach introduced in the work of Bosse and
Mogles (2012), which was in turn inspired by Blom,
Bakker, Blanker, Daams, Everdij and Klompstra
(2001). Whereas this approach mainly focuses on
the analysis of existing accidents (also called
accident analysis), the current paper also addresses
analysis of potential future accidents (called risk
47
Bosse T. and M. Mogles N..
Studying Aviation Incidents by Agent-based Simulation and Analysis - A Case Study on a Runway Incursion Incident.
DOI: 10.5220/0004229800470057
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 47-57
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

analysis). This is done by means of a multi-agent
simulation framework that addresses both the
behaviour of individual agents (operators, pilots) as
well as their mutual communication, and interaction
with technical systems. By manipulating various
parameters in the model, different scenarios can be
explored. Moreover, by means of automated checks
of dynamic properties, these scenarios can be
assessed with respect to their likelihood of the
occurrence of accidents. The approach is illustrated
by a case study on a runway incursion incident at a
large European airport in 1995.
The remainder of this paper is structured as
follows. In Section 2, the modelling approach used
in the paper is presented. In Section 3, the scenario
used within the case study is described. Section 4
introduces the agent-based model to simulate this
(and similar) scenarios, and Section 5 presents the
simulation results. Section 6 addresses formal
analysis of the model and its results, and Section 7
concludes the paper with a discussion.
2 MODELLING APPROACH
To model the different aspects of aviation operations
from an agent perspective, an expressive modelling
language is needed. On the one hand, qualitative
aspects have to be addressed, such as observations,
beliefs, and actions of human operators. On the other
hand, quantitative aspects have to be addressed, such
as the locations and speeds of aircraft. Another
requirement of the chosen modelling language is its
suitability to express on the one hand the basic
mechanisms of aviation operations (for the purpose
of simulation), and on the other hand more global
properties of these operations (for the purpose of
logical analysis and verification). For example, basic
mechanisms of aviation operations involve decision
functions for individual agents (e.g., an operator
may decide to give runway clearance, and a pilot to
abort a take-off procedure in case of an emergency).
On the other hand, examples of global properties
address the overall safety of an operation, such as
“no collisions take place”.
The predicate-logical Temporal Trace Language
(TTL) introduced in the work of Bosse, Jonker, van
der Meij, Sharpanskykh and Treur (2009) fulfils all
of these desiderata. It integrates qualitative, logical
aspects and quantitative, numerical aspects. This
integration allows the modeller to exploit both
logical and numerical methods for analysis and
simulation. Moreover it can be used to express
dynamic properties at different levels of aggregation,
which makes it well suited both for simulation and
logical analysis.
The TTL language is based on the assumption
that dynamics can be described as an evolution of
states over time. The notion of state as used here is
characterised on the basis of an ontology defining a
set of physical and/or mental (state) properties that
do or do not hold at a certain point in time. These
properties are often called state properties to
distinguish them from dynamic properties that relate
different states over time. A specific state is
characterised by dividing the set of state properties
into those that hold, and those that do not hold in the
state. Examples of state properties are ‘aircraft A
moves with speed S’, or ‘Air Traffic Controller C
provides runway clearance to aircraft A’. Real value
assignments to variables are also considered as
possible state property descriptions.
To formalise state properties, ontologies are
specified in a (many-sorted) first order logical
format: an ontology is specified as a finite set of
sorts, constants within these sorts, and relations and
functions over these sorts (sometimes also called
signatures). The examples mentioned above then can
be formalised by n-ary predicates (or proposition
symbols), such as,
moves_with_velocity(A, S) or commu-
nicate_from_to(C, A, runway_clearance)
. Such predicates
are called state ground atoms (or atomic state
properties). For a given ontology
Ont, the
propositional language signature consisting of all
ground atoms based on
Ont is denoted by
APROP(Ont). One step further, the state properties
based on ontology Ont are formalised by the
propositions that can be made (using conjunction,
negation, disjunction, implication) from the ground
atoms. Thus, an example of a formalised state
property is
moves_with_velocity(A, S) & communi-
cate_from_to(C, A, runway_clearance)
. Moreover, a state
S is an indication of which atomic state properties
are true and which are false, i.e., a mapping
S:
APROP(Ont) {true, false}
. The set of all possible
states for ontology Ont is denoted by
STATES(Ont).
To describe dynamic properties of complex
processes such as in aviation, explicit reference is
made to time and to traces. A fixed time frame
T is
assumed which is linearly ordered. Depending on
the application, it may be dense (e.g., the real
numbers) or discrete (e.g., the set of integers or
natural numbers or a finite initial segment of the
natural numbers). Dynamic properties can be
formulated that relate a state at one point in time to a
state at another point in time. A simple example is
the following (informally stated) dynamic property
about the absence of collisions:
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
48

For all traces ,
there is no time point t
on which a collision takes place.
A trace over an ontology Ont and time frame T
is a mapping :
T STATES(Ont), i.e., a sequence of
states
t
(t T) in STATES(Ont). The temporal trace
language TTL is built on atoms referring to, e.g.,
traces, time and state properties. For example, ‘in
trace at time
t property p holds’ is formalised by
state(, t) |= p. Here |= is a predicate symbol in the
language, usually used in infix notation, which is
comparable to the
Holds-predicate in situation
calculus. Dynamic properties are expressed by
temporal statements built using the usual first-order
logical connectives (such as , , , ) and
quantification ( and ; for example, over traces,
time and state properties). For example, the
informally stated dynamic property introduced
above is formally expressed as follows:
:TRACES t:TIME
state(, t) |= collision
In addition, language abstractions by introducing
new predicates as abbreviations for complex
expressions are supported.
To be able to perform (pseudo-)experiments,
only part of the expressivity of TTL is needed. To
this end, the executable LEADSTO language
described by Bosse, Jonker, van der Meij and Treur
(2007) has been defined as a sublanguage of TTL,
with the specific purpose to develop simulation
models in a declarative manner. In LEADSTO,
direct temporal dependencies between two state
properties in successive states are modelled by
executable dynamic properties. The LEADSTO
format is defined as follows. Let and be state
properties as defined above. Then,
e, f, g, h
means:
If state property holds for a certain time interval with
duration g,
then after some delay between e and f
state property will hold for a certain time interval with
duration h.
Based on TTL and LEADSTO, two dedicated
pieces of software have recently been developed.
First, the LEADSTO Simulation Environment
(Bosse, Jonker, van der Meij and Treur, 2007) takes
a specification of executable dynamic properties as
input, and uses this to generate simulation traces.
Second, to automatically analyse the resulting
simulation traces, the TTL Checker tool (Bosse et
al., 2009) has been developed. This tool takes as
input a formula expressed in TTL and a set of traces,
and verifies automatically whether the formula holds
for the traces.
3 CASE STUDY
Based on the modelling languages TTL and
LEADSTO, our model for flight operations will be
introduced in Section 4. Although this is a generic
model, it will be illustrated (in Section 5) by
applying it to a specific case study. To this end, a
simple scenario is used in the context of a runway
incursion incident that occurred in 1995 (Bosse and
Mogles, 2012). This scenario was obtained by
performing a semi-structured interview with an
available expert, a two years retired pilot of a
European civil aviation company.
The runway incursion incident took place during
the departure of an Airbus A310 of a civil aviation
company from one large airport in Europe. Although
the details of the interview and the case study are not
shown here (see Bosse and Mogles (2012) for this
purpose), a summary of the scenario is provided
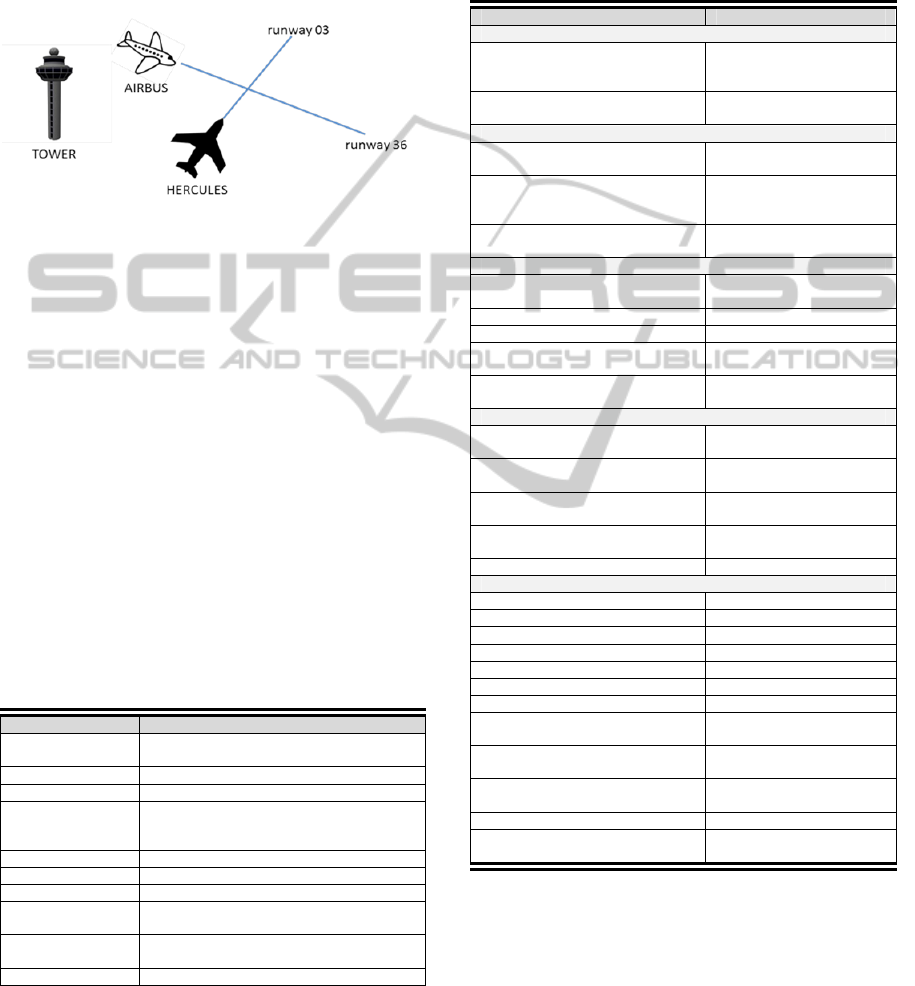
below. A schematic overview of the situation is
provided in Figure 1.
The Airbus was preparing for the departure: the pilot-in-
command was sitting on the left and the co-pilot on the right
seat in the cockpit and they were ready to start taxiing. They
were supposed to taxi to runway 03 in the north-east
direction. The Airbus received permission to taxi and started
taxiing to its runway. Approximately at the same time, a
military Hercules aircraft that was ready for the departure as
well received permission to taxi in the north-west direction
from its parking gate. The Hercules was supposed to take off
from runway 36 that crossed with runway 03 that was
designated for the Airbus. Both aircraft were taxiing to their
runways. During the taxiing, the Airbus received its flight
route from the air traffic controllers. Some time tater, when
the Airbus was near the runway designated for taking off, it
switched from the taxiing radio frequency to the frequency of
the Tower and received permission to line up on the assigned
runway. The Hercules was still at the taxiing radio frequency
and also received permission to line up, while at the same
time the Airbus received permission to take off at the radio
frequency of the Tower. However, due to unknown reasons
2
,
the Hercules pilot interpreted his permission for lining up as
permission for taking off and started taking off on runway 36.
As a result of this mistake of the pilot of the Hercules, two
aircraft were taking off simultaneously on crossing runways,
and none of the crews were aware of that. The air traffic
controllers in the Tower observed the conflicting situation
and communicated a ’STOP’ signal to the pilot-in-command
of the Airbus, while the Airbus was still on the ground (but at
high speed). The pilot had to make a quick decision about the
2
This misinterpretation might be explained by the fact that the pilot of
the Hercules got used to the routine procedure of taxiing from the same
military parking place at this airport and perhaps also of taking off
from the same runway. And in many past cases, the line up procedure
was often immediately followed by taking off, as permissions for
lining up and taking off were sometimes given simultaneously.
StudyingAviationIncidentsbyAgent-basedSimulationandAnalysis-ACaseStudyonaRunwayIncursionIncident
49
termination of the take-off as there is a point in this process
that one cannot safely do this anymore. After having analysed
the situation, the pilot-in-command of the Airbus gave a
command to the co-pilot (who controlled the aircraft) to
abort the take-off and start braking on the runway. During
braking, the crew of the Airbus saw the Hercules flying close
in the air above their own aircraft at a distance of about 5
meters. A serious collision was prevented.
Figure 1: Schematic overview of the case study.
4 AGENT-BASED MODEL
The following subsections describe, respectively, the
formal ontology for the case study, the executable
dynamic properties (or rules) used to model the
scenario, and some simulation results.
4.1 Formal Ontology
As the first step towards the formalisation of the
incident identified during the interview, formal
domain ontology was developed in TTL. In Table 1
and 2, an overview of the ontology elements is
shown, including the relevant sorts and subsorts
relations, elements (constants) of sorts, and logical
predicates over sorts.
Table 1: Domain ontology: sorts and elements.
SORT ELEMENTS
AGENT
{tower
sub-sorts: PILOT, AIRCRAFT}
PILOT {airbus_pilot, hercules_pilot}
AIRCRAFT {hercules, airbus}
ROADWAY
sub-sorts: RUNWAY, TAXIWAY,
STARTINGPOINT,
CROSSINGPOINT
RUNWAY {runway_03, runway_36}
TAXIWAY {taxiway_1, taxiway_2}
STARTINGPOINT {startingpoint_1, startingpoint_2}
CROSSINGPOINT
{crossing_point(runway_03),
crossing_point(runway_36)}
ACTION
{start_taxiing, start_line_up, start_take_off,
take_off_from, stop_take_off}
VELOCITY {low, high, very_high}
As shown in the first three rows of Table 1, the
model consists of five active agents that play a role
in the scenario (see also Figure 1): Tower, Airbus
Aircraft, Hercules Aircraft, Airbus Pilot and
Hercules Pilot. In addition, there are elements of the
environment that influence the agents’ behaviour in
the model, such as runways, taxiways and other
locations.
Table 2: Domain ontology: logical predicates.
PREDICATE DESCRIPTION
Communication
communicate_from_to(A:Agent,
B: Agent, C:Action,
R:Roadway)
agent A communicates
permission for action C on
roadway R to agent B
incoming_communication(A:
Agent, C:Action, R:Roadway)
agent A receives permission
for action C on roadway R
Internal states of agents
observation(A:Agent, I:Info_El)
agent A observes information
element I from the world
belief(A:Agent, I:Info_El)
agent A believes that
information element I is true
in the world
expectation(A:Agent, C:Action)
agent A has expectation for
action C
Actions of agents
move_from_to(R1: Roadway, R2:
Roadway)
action of moving from
roadway R1 to roadway R2
performed(A:Agent, C:Action)
agent A performs action C
set_velocity(A:Aircraft, V:Velocity)
aircraft A acquires velocity V
take_off_from(R:Runway)
take-off is performed from
runway R
stop_take_off(R:Runway)
take-off from runway R is
aborted
Positions of agents
is_at_position(A:Agent,
R:Roadway)
agent A is on roadway R
is_adjacent_to(R1:Roadway,
R2:Roadway)
roadway R1 is adjacent to
roadway R2
crossing_ways(R1:Roadway,
R2:Roadway
roadways R1 and R2 cross
is_half_way(A:Agent,R:Roadway))
agent A is half way on
roadway R
in_air(A:Aircraft)
aircraft A is in air
Other information elements used within predicates
is_available(R:Roadway))
roadway R is available
is_pilot_of(A:Agent, B:Aircraft))
agent A is a pilot of aircraft B
has_role(A:Agent)
an agent has role A
start_taxiing
start taxiing
start_line_up
permission to line up
start_take_off
permission to take off
velocity(A:Aircraft, V:Velocity)
aircraft A has velocity V
has_priority_over(A:Aircraft,
B:Aircraft)
aircraft A has priority over
aircraft B
not_in_conflict(A1:Agent, A2:
Agent)
agent A1 is not in conflict
with agent A2
similarity(A1:Action, A2:Action)
action A1 is similar to action
A2
velocity(A:Aircraft, V:Velocity)
aircraft A has velocity V
collision(A:Aircraft, B:Aircraft )
aircraft A collides with
Aircraft B
4.2 Executable Dynamic Properties
The dynamic relations between the agents are
modelled by means of executable dynamic
properties (EPs) in LEADSTO. These properties can
be subdivided into four different categories, namely
properties related to 1) belief formation, 2)
communicative action generation, 3) physical action
generation, and 4) transfer.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
50

Below some examples of properties in formal
LEADSTO notation per category are given (for
simplicity, the time parameters have been left out).
Note that most properties are applied to all agents.
Only some of the properties (e.g., EP2, EP6 and
EP16) are specific to a particular agent role (e.g.,
Tower or Pilot).
4.2.1 Belief Formation
Belief formation properties specify how agents
create beliefs about the world on the basis of the
observations or communications they receive. For
instance, EP1 states that, if an agent observes no
other agents at a certain roadway, it concludes that
this roadway is available.
Belief formation properties may also represent
erroneous behaviour, e.g. related to cognitive biases
such as the expectation bias (see:
http://www.skybrary.aero/index.php/ATC_Expectati
on_Bias). For example, EP5 states that, if an agent
receives an instruction I1, while it has a strong
expectation to receive a similar, but slightly different
instruction I2, it will believe that it actually did
receive I2. This property can be used to model the
fact that the Hercules pilot interpreted his permission
for lining up as permission for taking off.
EP1 - Belief Formation on Roadway Availability
observation(A:Agent,
not_at_position(B:Agent, R:Roadway))
belief(A:Agent, is_available(R:Roadway))
EP5 - Communication Misinterpretation
incoming_communication(A:Agent, I1:Action, R:Roadway)
& belief(A:Agent, similarity(I1: Action, I2: Action))
& I1 ≠ I2
& expectation(A:Agent, I2:Action)
belief(A:Agent, I2:Action, R:Roadway)
4.2.2 Communicative Action Generation
These properties specify how agents derive actions
to communicate to other agents, based on the beliefs
they possess. For instance, EP2 determines when the
Tower agent communicates a permission to start
taxiing to the different aircraft, whereas EP16 when
the Tower communicates a request to abort take-off.
EP2 - Tower: Taxiing request communication
belief(A:Agent, is_at_position(B:Aircraft, S: Startingpoint))
& belief(A:Agent,
is_adjacent_to(T:Taxiway, S: Startingpoint))
& belief(A:Agent, is_available(T:Taxiway))
& belief(A:Agent, has_role(tower))
communicate_from_to(A:Agent, B:Aircraft,
start_taxiing(T:Taxiway))
EP16 - Tower: Take-off Abort Request
Communication
belief(tower, is_half_way(A:Aircraft, R1: Runway))
& belief(tower, is_half_way(B:Aircraft, R2: Roadway))
& belief(tower, crossing_ways(R1:Runway, R2:Roadway))
& belief(tower, velocity(B:Aircraft, high))
& not collision(A:Aircraft, B:Aircraft)
& B ≠ A
communicate_from_to(tower, B:Aircraft,
stop_take_off, R1:Runway)
4.2.3 Physical Action Generation
In addition to communicative actions, agents may
also derive physical actions. An example of this is
represented by property EP6, which determines that
pilot agents may start taxiing when they believe this
is appropriate.
EP6 - Pilot: Taxiing Initiation
belief(P:Pilot, start_taxiing(T:Taxiway)
& is_a _pilot_of(P:Pilot, A:Aircraft)
& belief(P:Pilot, is_available(T:Taxiway))
& is_at_position(A:Aircraft, S:Startingpoint)
& belief(P:Pilot, is_adjacent_to(T:Taxiway, S:Startingpoint))
performed(P:Pilot,
move_from_to(S:Startingpoint, T:Taxiway))
& performed(P:Pilot, set_velocity(A:Aircraft, low))
4.2.4 Transfer
Finally, transfer properties represent correct transfer
of information. For instance, EP3 states that
information that is communicated from agent A to
agent B is also received as such by agent B (of by
the pilot of agent B, if agent B is an aircraft).
EP3 - Communication Transfer
communicate_from_to(A:Agent, B:Agent, I:Action,
R:Roadway)
& is_pilot_of(P:Pilot, B:Aircraft)
incoming_communication(P:Pilot, I:Action, R:Roadway)
Due to space limitations, only a number of the
executable properties per category have been listed.
However, the full specification (using the notation of
the LEADSTO simulation tool) can be found at
http://www.cs.vu.nl/~tbosse/aviation.
5 SIMULATION RESULTS
This section describes simulation results of the case
study across three different scenarios. The first
scenario represents the real situation as described in
Section 3, and the other two scenarios simulate two
hypothetical situations that would occur when the
perceptions and the actions of the agents involved
would slightly differ from the real case. These
hypothetical situations were created by making
small changes in some of the relevant parameters.
StudyingAviationIncidentsbyAgent-basedSimulationandAnalysis-ACaseStudyonaRunwayIncursionIncident
51

In the simulation traces depicted in Figures 2-4, a
time line is represented on the horizontal axis and
the states that hold in the world are represented on
the vertical axis. The dark lines on the right indicate
time intervals within which the given states are true.
For the sake of transparency, the atoms that
represent observations and beliefs of the agents are
not depicted in the traces.
5.1 Scenario 1: Interference of Tower
The simulation trace of scenario 1 is shown in
Figure 2. This scenario simulates the real events of
the case study. It represents the situation that the
pilot of the Hercules aircraft misinterprets the
information that is communicated to him by
controllers in the Tower because of an incorrect
expectation (see atom
expectation(hercules_pilot
Figure 2: Simulation results of Scenario 1 - Interference of
Tower prevents severe collision.
start_take_off) at the top of the trace that is true during
the whole simulation), and consequently initiates
take-off without take-off clearance (see atom
performed(hercules_pilot, take_off_from(runway_36)) that
is true from time point 15-21).
There is no atom that states that take-off
clearance from the Tower is communicated to the
Hercules. At the same time, the clearance for take-
off is given to the Airbus aircraft that almost
simultaneously initiates take-off from the crossing
runway at time point 20; see atom
perfor-
med(airbus_pilot, take_off_from(runway_03))
. Luckily,
the Tower observes the conflict situation (this atom
is not depicted in the trace) and communicates a
“STOP” signal to the Airbus at time point 24. As a
result, the pilot of the Airbus aborts the take-off at
time point 27 and a severe collision is prevented by
this action. This scenario is an example of a case
when a hazardous situation created by the wrong
decision and action of one agent can be corrected by
appropriate intervention of other agents.
5.2 Scenario 2: Nominal Behaviour
The simulation trace of scenario 2 is shown in
Figure. 3. This trace represents an ideal scenario
where all agents behave properly. In the initial
settings of this hypothetical scenario the pilot of the
Hercules has no erroneous expectation about the
take-off clearance as in scenario 1. As a result, he
performs line-up correctly and does not initiate any
take-off, as shown in Fig. 3. After both aircraft have
performed line-up on their runways at time point 14,
permission to take off is communicated only to the
Airbus (see atom
communicate_from_to(tower, airbus,
start_take_off, runway_03))
). Hence, in this scenario all
agents behave according to the nominal
prescriptions of the agent system. Consequently, no
collision or hazardous situation occurs.
5.3 Scenario 3: Collision
The simulation of scenario 3 is shown in Figure 4.
This scenario represents a situation when the pilot of
the Hercules aircraft has erroneous expectations
about the take-off clearance and initiates take-off
while he should not (like in scenario 1). However, in
this case the controllers in the
Tower observe the conflict situation rather late, and
therefore they do not have the time to interfere. As a
result, both aircraft collide; see atom
collision(hercules, airbus) at the end of the trace.
In this scenario the time parameters of the rule
that generates the action to take off have been
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
52
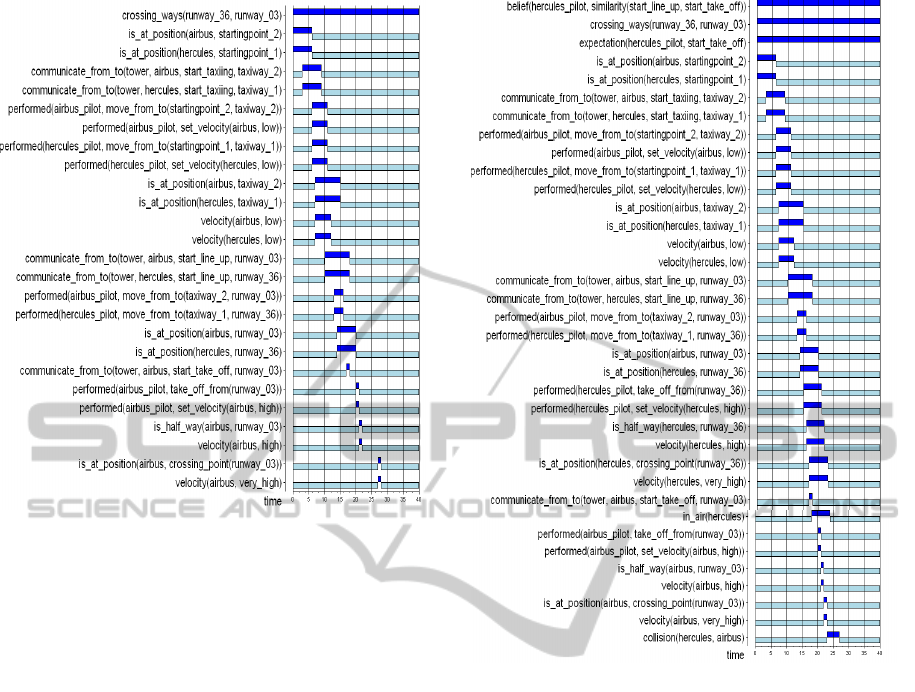
Figure 3: Simulation results of Scenario 2 - Hercules pilot
does not make interpretation error.
modified in such a way that this action is performed
more quickly. This has important consequences for
the opportunity of the Tower to interfere and prevent
the collision. As can be seen in Fig. 4, the short
duration of the take-off procedure leads to severe
consequences as both aircraft perform take-off
almost simultaneously on crossing runways.
6 FORMAL ANALYSIS
This section addresses formal analysis of the
simulated traces. Section 6.1 addresses specification
of (global) dynamic properties, Section 6.2 address
specification of interlevel relations between dynamic
properties at different aggregation levels, and
Section 6.3 discusses some results of verification of
properties against traces.
6.1 Global Dynamic Properties
Various dynamic properties for the aviation domain
have been formalised in TTL, a number of which are
introduced below. All of these properties are related
in some way to the occurrence of collisions. More
specifically, Section 6.1.1 addresses properties that
relate to the fact that ‘there are never two
Figure 4: Simulation results of Scenario 3 - Interpretation
error by Hercules results in severe collision.
simultaneous take-offs at crossing runways’. Section
6.1.2 addresses properties that relate to the fact that
‘IF any of such simultaneous take-offs occur, THEN
they will be corrected on time because one of the
aircraft aborts its take-off’. It is easy to see that
either one of these cases is sufficient to guarantee
that no runway incursions will occur (assuming for
simplicity that simultaneous take-offs are the only
ways in which runway incursions can possibly
occur). All properties in Section 6.1.1 are presented
both in semi-formal and in formal (TTL) notation; to
enhance readability, the properties in Section 6.1.2
are presented only in semi-formal notation.
Note that the properties presented below address
processes at different aggregation levels, thereby
distinguishing global properties about the entire
scenario (indicated by GP), intermediate properties
about input and output states of individual agents
(indicated by IP), and local properties about mental
processes of agents or about information/commu-
nication transfer between agents (indicated by LP).
StudyingAviationIncidentsbyAgent-basedSimulationandAnalysis-ACaseStudyonaRunwayIncursionIncident
53

6.1.1 Absence of Simultaneous Take-Offs
GP1 - No Simultaneous Take-offs at Crossing Runways
There are no trace m, time points t1 and t2, agents a1 and a2, and
runway r1 and r2 such that
agent a1 performs a take-off on runway r1 at time t1
and agent a2 performs a take-off on runway r2 at time t2
and runway r1 and r2 are crossing runways
and the difference between t1 and t2 is smaller than or equal to d
3
.
[m:TRACE t1,t2:TIME a1,a2:AGENT r1,r2:RUNWAY
state(m, t1) |= performed(a1, take_off_from(r1)) &
state(m, t2) |= performed(a2, take_off_from(r2)) &
state(m, t1) |= world_state(crossing_ways(r1, r2)) &
| t1 - t2 | d ]
IP1 - No Simultaneous Permissions to Take off at
Crossing Runways
There are no trace m, time points t1 and t2, agents a1 and a2, and
runway r1 and r2 such that
the tower gives agent a1 permission for take-off on runway r1 at
time t1
the tower gives agent a2 permission for take-off on runway r2 at
time t2
and runway r1 and r2 are crossing runways
and the difference between t1 and t2 is smaller than or equal to d.
[m:TRACE t1,t2:TIME a1,a2:AGENT r1,r2:RUNWAY
state(m, t1) |=
communicate_from_to(tower, a1, start_take_off(r1)) &
state(m, t2) |=
communicate_from_to(tower, a2, start_take_off(r2)) &
state(m, t1) |= world_state(crossing_ways(r1, r2)) &
| t1 - t2 | d ]
IP2 - Each Take-off is Preceded by a Corresponding
Permission
For all traces m, time points t1, agents a, and runways r
if agent a performs a take-off on runway r at time t
then there was a time point t2 with t1-d t2 t1 on which
the tower gave agent a permission for take-off on runway r.
m:TRACE t:TIME a:AGENT r:RUNWAY
state(m, t1) |= performed(a, take_off_from(r))
[ t2:TIME state(m, t2) |=
communicate_from_to(tower, a, start_take_off(r)) &
t1-d t2 t1 ]
LP1 - Each Take-off is Preceded by a Corresponding
Belief
For all traces m, time points t1, agents a, and runways r
if agent a performs a take-off on runway r at time t
then there was a time point t2 with t1-d t2 t1 on which
agent a believed that it had permission for take-off on runway r.
m:TRACE t:TIME a:AGENT r:RUNWAY
state(m, t1) |= performed(a, take_off_from(r))
[ t2:TIME state(m, t2) |= belief(a, start_take_off(r)) &
t1-d t2 t1 ]
LP2 - Each Belief about Permissions is Preceded by a
Corresponding Communication
For all traces m, time points t1, agents a, and runways r
if agent a believes that it has permission for take-off on runway r
at time t
then there was a time point t2 with t1-d t2 t1 on which
the tower gave agent a permission for take-off on runway r.
3
Many of the properties given in this section contain some parameters d and e. These
should be seen as constants, of which the value can be filled in by the modeller.
m:TRACE t:TIME a:AGENT r:RUNWAY
state(m, t1) |= belief(a, start_take_off(r))
[ t2:TIME state(m, t2) |=
communicate_from_to(tower, a, start_take_off(r)) &
t1-d t2 t1 ]
6.1.2 Correction of Simultaneous Take-Offs
GP2 - All Simultaneous Take-offs are Corrected on
Time
For all traces m, time points t1 and t2, agents a1 and a2, and
runways r1 and r2,
if agent a1 performs a take-off on runway r1 at time t1
and agent a2 performs a take-off on runway r2 at time t2
and runway r1 and r2 are crossing runways
and the difference between t1 and t2 is smaller than or equal to d
then there is a time point t3 with t1 t3 t1+e and t2 t3 t2+e
on which either agent a1 or agent a2 aborts take-off.
IP3 – For all Simultaneous Take-offs that are
Observed an Abort Request is Communicated
For all traces m, time points t1 and t2, agents a1 and a2, and
runways r1 and r2,
if at time t1the tower observes that agent a1 performs a take-off
on runway r1
and at time t2 the tower observes that agent a2 performs a take-off
on runway r2
and runway r1 and r2 are crossing runways
and the difference between t1 and t2 is smaller than or equal to d
then there is a time point t3 with t1 t3 t1+e and t2 t3 t2+e
on which the tower communicates either to agent a1 or to agent
a2 a request to abort take-off.
IP4 - All Received Abort Requests are Followed
For all traces m, time points t1, agents a1 and a2, and runways r1,
if at time t1agent a1 receives from agent a2 a request to abort
take-off from runway r1
then there is a time point t2 with t1 t2 t1+d on which agent a1
indeed aborts take-off from r1.
LP3 - All Simultaneous Take-offs are Observed
For all traces m, time points t1 and t2, agents a1 and a2, and
runways r1 and r2,
if agent a1 performs a take-off on runway r1 at time t1
and agent a2 performs a take-off on runway r2 at time t2
and runway r1 and r2 are crossing runways
and the difference between t1 and t2 is smaller than or equal to d
then there are two time points t3 and t4 with t1 t3 t1+e and t2
t4 t2+e on which the tower observes both take-offs.
LP4 - All communicated Abort Requests are Received
For all traces m, time points t1, agents a1 and a2, and runways r1,
if at time t1agent a1 communicates to agent a2 a request to abort
take-off from runway r1
then there is a time point t2 with t1 t2 t1+d on which this
request is received from a1 by 2.
LP5 - All Observed Take-offs are Converted into
Corresponding Beliefs
For all traces m, time points t1, agents a1, and runways r1,
if at time t1 the tower observes that agent a1 performs a take-off
on runway r1
then there is a time point t2 with t1 t2 t1+d on which the
tower believes that agent a1 performs a take-off on runway r1.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
54

LP6 – For all Beliefs on Simultaneous Take-offs an
Abort Request is Communicated
For all traces m, time points t1 and t2, agents a1 and a2, and
runways r1 and r2,
if at time t1the tower believes that agent a1 performs a take-off on
runway r1
and at time t2 the tower believes that agent a2 performs a take-off
on runway r2
and runway r1 and r2 are crossing runways
and the difference between t1 and t2 is smaller than or equal to d
then there is a time point t3 with t1 t3 t1+e and t2 t3 t2+e
on which the tower communicates either to agent a1 or to agent
a2 a request to abort take-off.
LP7 - All Received Requests are Converted into
Corresponding Beliefs
For all traces m, time points t1, agents a1 and a2, and runways r1,
if at time t1agent a1 receives from agent a2 a request to abort
take-off from runway r1
then there is a time point t2 with t1 t2 t1+d on which agent a1
believes that it should abort take-off from r1.
LP8 - All Believed Requests are Followed
For all traces m, time points t1, agents a1, and runways r1,
if at time t1agent a1 believes that it should abort take-off from
runway r1
then there is a time point t2 with t1 t2 t1+d on which agent a1
indeed aborts take-off from r1.
6.2 Interlevel Relations
A number of logical relationships have been
identified between properties at different
aggregation levels. An overview of all identified
logical relationships relevant for GP1 is depicted as
an AND-tree in Figure 5.
Figure 5: AND-tree of interlevel relations between
dynamic properties related to GP1.
The relationships depicted in this figure should
be interpreted as semantic entailment relationships.
For example, the relationship at the highest level
expresses that the implication IP1 & IP2 => GP1
holds, whereas the relationship at the lower level
expresses that LP1 & LP2 => IP2 holds. A sketch of
the proof for the first implication is as follows (for
simplicity reasons abstracting from time constrains):
Suppose that IP1 and IP2 hold. Then, according to IP1, no
two permissions to take off at crossing runways will be
communicated simultaneously. Moreover, since take-offs
are only performed immediately after a corresponding
permission has been communicated (as guaranteed by
IP2), no simultaneous take-offs are performed at crossing
runways. This confirms GP1.
Such logical relationships between dynamic
properties can be very useful in the analysis of (both
simulated as well as empirical) scenarios, especially
when used in combination with the TTL Checker
Tool mentioned earlier. For example, for simulation
trace 1, checking GP1 pointed out that this property
was not satisfied. As a result, by a refutation process
(following the tree in Figure 5 top-down) it could be
concluded that either IP1 or IP2 failed (or a
combination of them). When, after further checking,
IP2 was found to be the cause of the failure, the
analysis could proceed by focusing on LP1 and LP2.
Eventually, LP1 was found satisfied, whereas LP2
failed. Thus, (part of) the source of the incident
could be reduced to failure of LP2, i.e., there was an
agent (namely the pilot of the Hercules) that
believed to have the permission to take off, whilst
this was not communicated by the tower. One level
deeper, such local properties can even be related to
executable properties. For instance, the failure of
LP2 can be explained because the Hercules pilot
applied property EP5. A full connection of local
properties to executable properties is beyond the
scope of this paper, but a detailed discussion can be
found in Jonker and Treur (2002).
Similar to Figure 5, an AND-tree representing all
identified logical relationships relevant for GP2 is
shown in Figure 6.
Figure 6: AND-tree of interlevel relations between
dynamic properties related to GP2.
6.3 Checking Results
Using the TTL Checker, all dynamic properties
introduced in Section 6.1 have been checked against
the three simulation traces discussed in Section 5.
The results are shown in Table 3 (where ‘X’ denotes
‘satisfied’).
As can be seen from the table, scenario 2 is
indeed a nominal case in which all expected
properties hold. In contrast, in scenario 1, two
simultaneous take-offs at crossing runways occur
(since GP1 fails), which can eventually be related to
an incorrectly derived belief of permission for take-
off (failure of LP2).
LP2
LP1
GP
1
IP1
IP2
GP2
LP6LP5 LP8LP7
IP3
LP4
LP3 IP4
StudyingAviationIncidentsbyAgent-basedSimulationandAnalysis-ACaseStudyonaRunwayIncursionIncident
55

Table 3: Checking dynamic properties against traces.
property scenario 1 scenario 2 scenario 3
GP1 - X -
IP1 X X X
IP2 - X -
LP1 X X X
LP2 - X -
GP2 X X -
IP3 X X -
IP4 X X X
LP3 X X +/-
LP4 X X X
LP5 X X X
LP6 X X -
LP7 X X X
LP8 X X X
However, since the situation is corrected on time
(GP2 succeeds), no collision occurs in this scenario.
In scenario 3, GP1 also fails, but in addition GP2
fails, which can be related partly to failure of LP3
(the simultaneous take-offs are observed, but too
late) and to failure of LP6 (once the tower believes
that there are simultaneous take-offs, it is too late to
communicate an abort request). As a result, the
collision is not prevented.
7 DISCUSSION
For the analysis of accidents and incidents in
aviation, roughly two streams can be distinguished
in the literature, namely accident analysis and risk
analysis. Whilst the former has the goal to determine
the cause of an accident that actually took place, the
latter aims to assess the likelihood of the occurrence
of future accidents. Hence, although both streams
have similar purposes, a main difference is that
accident analysis attempts to identify one specific
combination of hazardous factors, whereas risk
analysis basically explores a whole range of such
factors, and the associated risks.
The approach introduced in the current paper in
principle addressed both types of analysis. An agent-
based method for simulation and analysis of aviation
incidents was introduced, and based on a case study
on a runway incursion incident it was demonstrated
how the approach can be applied both for
accident/incident analysis (to examine the causes of
the scenario that took place in reality) and for
qualitative risk analysis (to determine potential risks
for various hypothetical scenarios).
For a more quantitative type of dynamic risk
analysis, often Monte Carlo methods are applied; see
e.g. the work of Blom et al. (2001); or Stroeve,
Blom and Bakker (2004). These methods are very
useful for quantitative collision risk estimations, but
one of their disadvantages is lack of transparency
due to the complex stochastic relations between the
elements of the agent-based models that are used. In
contrast, the approach presented in this paper is
highly transparent; it provides a visible trace of risk
related events that can be analysed manually or
automatically with the help of special tools.
Moreover, the roles of the agents involved in risk
creation and reduction (as well as their underlying
cognitive processes, like the influence of biased
reasoning) are clear from the trace, while in dynamic
quantitative risk models used for Monte Carlo
simulations this is usually not the case. The
complexity of Monte Carlo methods makes it also
difficult for the non-specialist to understand the
implications of actions and thus makes a public
debate of issues a problem. However, a disadvantage
of the method proposed in this paper is that it cannot
provide a precise risk estimation as is provided by
Monte Carlo methods. In follow-up research, we
therefore intend to explore the possibilities to
combine our approach with elements from Monte
Carlo methods.
ACKNOWLEDGEMENTS
This work was performed under the auspices of the
SESAR WP-E research network ComplexWorld. It
is co-financed by Eurocontrol on behalf of the
SESAR Joint Undertaking. The authors are grateful
to the retired airline pilot who participated in the
interview for his useful input on the case study, and
to Jan Treur for a number of fruitful discussions.
REFERENCES
Blom H. A. P., Bakker G. J., Blanker P. J. G., Daams J.,
Everdij M. H. C., and Klompstra M. B. (2001).
Accident risk assessment for advanced air traffic
management. In: Donohue, G. L. and Zellweger, A. G.
(eds.), Air Transport Systems Engineering, AIAA, pp.
463-480.
Bosse, T., Jonker, C. M., Meij, L. van der, Sharpanskykh,
A., and Treur, J. (2009). Specification and Verification
of Dynamics in Agent Models. International Journal
of Cooperative Information Systems, vol. 18, 2009, pp.
167-193.
Bosse, T., Jonker, C. M., Meij, L. van der, and Treur, J.
(2007). A Language and Environment for Analysis of
Dynamics by Simulation. International Journal of
Artificial Intelligence Tools, volume 16, issue 3, 2007,
pp. 435-464.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
56

Bosse, T. and Mogles, N. (2012). Formal Analysis of
Aviation Incidents. In: H. Jiang et al. (eds.).
Proceedings of the 25th International Conference on
Industrial, Engineering & Other Applications of
Applied Intelligent Systems, IEA/AIE'12. Springer
Verlag, LNAI volume 7345, 2012, pp. 371-380.
Everdij, M. H. C. (2004). Review of techniques to support
the EATMP Safety Assessment Methodology. Report
for EEC Safety Methods Survey project, Volume I and
II.
Hollnagel, E. (2004). Barriers and accident prevention.
Aldershot: Ashgate.
Jonker, C. and Treur, J. (2002). Compositional
Verification of Multi-Agent Systems: a Formal
Analysis of Pro-activeness and Reactiveness.
International Journal of Cooperative Information
Systems, vol. 11, 2002, pp. 51-92.
Leveson N. (2004). A new accident model for engineering
safer systems. Safety Science 42, pp. 237-270.
Stroeve, S. H., Blom, H. A. P., and Bakker, G. J. (2009).
Systemic accident risk assessment in air traffic by
Monte Carlo simulation. Safety Science 47, pp. 238-
449.
StudyingAviationIncidentsbyAgent-basedSimulationandAnalysis-ACaseStudyonaRunwayIncursionIncident
57
