
Smart Video Orchestration for Immersive Communication
Alaeddine Mihoub
and Emmanuel Marilly
Alcatel-Lucent Bell Labs France, Multimedia Technologies Domain, Centre de Villarceaux, Route de Villejust, 91620,
Nozay, France
Keywords: Camera Orchestration, Hidden Markov Model, Learning, User, Immersive Communication.
Abstract: In the context of immersive communication and in order to enrich attentional immersion in
videoconferences for remote attendants, the problem of camera orchestration has been evoked. It consists of
selecting and displaying the most relevant view or camera. HMMs have been chosen to model the different
video events and video orchestration models. A specific algorithm taking as input high level observations
and enabling non expert users to train the videoconferencing system has been developed.
1 INTRODUCTION
A key challenge of the telecommunication industry
is to identify the future of communication.
Immersive communication has been defined as the
way to exploit video and multimedia technologies in
order to create new relevant and valuable usages.
But in a context where the objective is to
improve distant communications, sensorial
immersion (i.e. all technical capabilities to mimic
sensorial feelings) is not enough. Because
communication is made of social interaction,
narration, task driven activities, we need to include a
new aspect for immersion: attentional immersion.
Attentional immersion concerns the cognitive
experience to be immersed in a narration, in a task or
in a social interaction.
Figure 1: Remote Immersive meeting use case.
In order to improve sensorial and attentional
immersion, the remote immersive meeting &
experience sharing (e-education, town hall meeting)
use case (Figure 1) has been observed and several
pain points were identified such as keeping attention
(e.g. interactivity, dynamicity, concentration,
comprehention, boredom, diversion), remote
audience feedback (e.g. reactions, questions,
discussions) and video orchestration issues (e.g. how
to switch between cameras?, which camera to
displayed in the main view?, which metadata use?,
How to model this metadata?).
In this paper we will focus mainly on the video
orchestration issues.
2 VIDEO ORCHESTRATION
Having attentional immersion used for remote video
presentation use cases (i.e. town hall meeting, e-
learning, etc...) imply to develop and implement
specific reasoning mechanisms. Such mechanisms
enable for instance to identify which of the video
events happening is the most relevant (Lavee, 2009)
to display. Or, it may help to implement elements of
the Cognitive Load Theory (Mayer, 2001) in order
to support a better knowledge transfer (for instance
when narration and visual information are
complementary and presented simultaneously).
Our experimental video conference system has
been extended to enable video orchestration
supporting some of these attentional immersion
aspects.
Several solutions and systems were proposed to
solve the problem of camera selection/orchestration.
752
Mihoub A. and Marilly E..
Smart Video Orchestration for Immersive Communication.
DOI: 10.5220/0004230307520756
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 752-756
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
For instance, a remote control has been chosen to
select videos/cameras to display or pre-defined
orchestration templates have been used to show
participants of the meeting. Such exisiting systems
are unable to manage high number of video streams
with high level of details, dynamicity in the
rendering, adaptability to the user intent and
programmability and flexibility in the orchestration.
Video orchestration based on “audio events” is
one way in this direction. Yet, as around 70% of all
the meaning is derived from nonverbal
behavior/communication (Engleberg, 2006) useful
information for video orchestration are missing (i.e.
gesture, expression, attention,…).
Al-Hames (Al-Hames and Dielmann, 2006)
proved that the audio information is not sufficient
and visual features are essential. Then, Al-Hames
(Al-Hames and Hörnler, 2006) proposed a new
approach based on rules applied on low level
features such as global motions, skin blobs and
acoustic features. HMMs (Hidden Markov Models)
have been also used (Hörnler, 2009) for video
orchestration by conbining low and high level
features.
Based on theses observations and inspired from
(Al-Hames and Hornler, 2007) and (Ding, 2006), we
will use for our video orchestration a system based
on HMMs taking as input only high level features
such as Gesture (Fourati and Marilly, 2012), Motion
(Cheung and Kamath, 2004), Face expression
(Hromada et al., 2010), Audio (O’Gorman, 2010).
The benefit of the use of high level features is to
solve the problem of programmability of the video
orchestration during video conferences. Basic users
can define their own rules transparently and such
approach improves the user experience, the
immersion and efficiency of video-conferences.
3 PROGRAMMABILITY
Implicit or user intent-based programmability
capabilities enabling to model video orchestration
and to smartly orchestrate the displaying of
video/multimedia streams have been implemented in
our system. Data used by our HMM engine to model
the video orchestration are captured through the
combination of two approaches: visual programming
and programming by example. In our HMM model,
the transition matrix A contains transition
probabilities between diverse camera views; the
emission matrix B contains emission probabilities of
each observation knowing the current state or
screen; the initialization matrix contains the
probability for each camera to be showed the first.
3.1 Solution Description
Therefore, the “multimedia orchestrator” module,
part of the videoconferencing system, has been
augmented by the three following functionalities:
o Smart video orchestration capabilities thanks to
HMMs.
o Learning/programmability capabilities. That
means that the system is able to define
automatically new orchestration models through
user intent capture and interactions.
o Smart template detection. That means that the
system is able to recognize the video
orchestration model that best fits the video
conference context/scenario and the user profile.
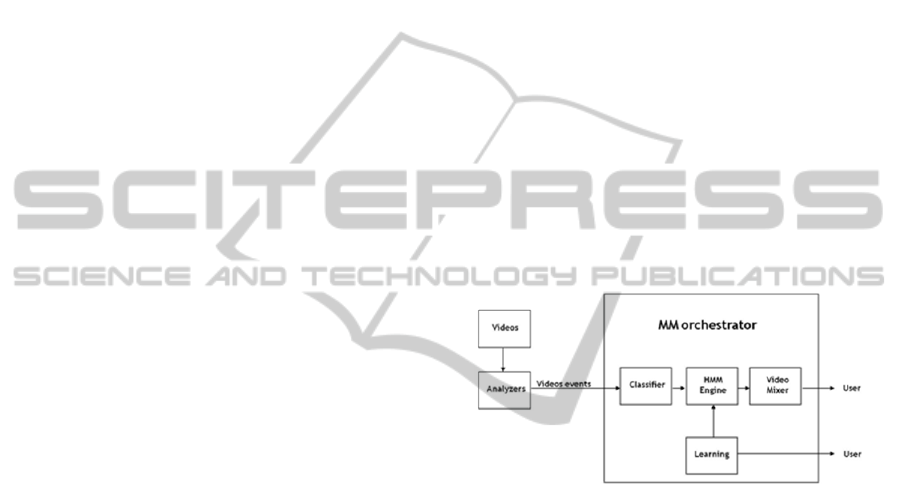
Figure 2 presents a basic scheme of the solution. The
engine of the “Multimedia Orchestrator” module is
based on specific mechanisms (e.g. learning
mechanisms, scenario recognition,…) integrating
HMMs.
Figure 2: Basic scheme of the solution.
The “MM orchestrator” module takes as inputs
video streams and video/audio events metadata
(coming for instance form video/audio analyzers
outputs). Video analyzers enable to detect high level
video events such as gestures, postures, faces and
audio analyzers enable to detect audio events such as
who is speaking, keywords, silence and noise level.
Initially, based on the first received video and audio
events metadata such as “speaker metadata”, the
classifier module selects the template that fits best
the temporal sequence of events. By default, the user
can select a model related to the current meeting
scenario. During the use, the classifier can change
the model if another one fits better the temporal
sequence of events.
This problem of selecting the right model is known
as recognition problem. Both, Forward algorithm
(Huang et al., 1990) and Backward algorithm can
solve this issue. In our MM orchestrator we have
used the Forward algorithm. Next step after the
selection of the best template is to select the most
SmartVideoOrchestrationforImmersiveCommunication
753

relevant camera to display. This decoding step is
assured by the Viterbi algorithm (Viterbi, 1967).
Once the decoding done, the HMM engine will
orchestrate videos through a video mixer.
3.2 A New Learning Mechanism
In usual approaches (Al-Hames and Hornler, 2007);
(Hörnler et al., 2009), the learning problem is known
as an estimation problem. The EM algorithm
(Dempster et al., 1977) (a.k.a. Baum Welch
algorithm (Baum et al., 1970)) is used to
reestimation the parameters
, ,
. By default this
process is done by experts and directly implemented
in systems.
Figure 3 gives an overview of the proposed solution
enabling basic users to create and personalize their
own video orchestration models through the use of
learning mecanisms (e.g. intent-based
programming).
Figure 3: Video Orchestration Learning Module.
A visual programming interface is providing to
the user (figure 6). The interface displays the video
streams and the detected video events. The user
selects which video stream has to be displayed as
main stream by the orchestrator depending of the
detected video event. The learner module records the
events and the corresponding chosen screens and
generates a new template (or updates an existing
one). From a technical point of view, the module
records the observations and the corresponding
selected states and generates a new HMM with the
appropriate probabilities. The following section
details the implemented learning process.
Learning Module Theory
The learning algorithm enables to create and train
video orchestration models based on the user uses
without any technical skills in progamming. It is
composed of 3 modules: the user visual interface,
the user activities recorder and the HMM generator.
The three components
, ,
of the HMM has
been determined in the following manner:
1. Training of the Initialization Matrix
The initialization probability of the first state
selected by the user is set to 1 and the others to 0.
2. Training of the Transition Matrix
The training of this matrix is composed of 4 steps:
Step 1: Get the number of states for the HMM
inputted.
Step 2: Generate a comparison matrix. This matrix
will contain all possible transitions.
Step 3: Browse the states sequence and each
transition will be compared to each transition in the
comparison matrix. If a similarity is found, the
occurrence matrix will be filled.
Step 4: Once the occurrence matrix obtained, the
transition matrix is estimated. The equation 1 gives
the formula enabling the transition matrix
estimation.
∑
(1)
Where Occ is the occurrence matrix.
3. Training of the Emission Matrix
For each state, each type of observation is count, and
then divided by the total observations of that state.
The equation 2 gives the formula enabling to
estimate the emission matrix:
∑
(2)
Where occObs represents the occurrence matrix for
each type of observation knowing the state.
3.3 HMM Model for e-Learning
The Video Orchestration Learning module has been
applied and tested in the context of a basic e-
learning video conferences scenario. The scenario
consists in one video stream for the lecturer/tutor,
one video stream for the virtual class room and
several individual video streams for the
students/learners. Figure 4 gives a description.
Figure 4: e-Learning use case description.
The HMM model is configured as follow:
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
754

o 3 States: 1-Tutor Screen, 2-Virtual Class Room
Screen and 3-Learner Screen.
o 17 Observations. This number corresponds to
the number of video or audio events that can be
detected by our system. These observations are
split in 7 families: Gestures, Motion, Face
Expressions, Keywords, Audio Cues, Slide
Number, Sub-Events. Figure 5 gives a detail
representation of the observations used.
Figure 5: Model Observations.
For the scenario, 5 basics use-cases been defined
corresponding to 5 initial video orchestration models
which are: normal lecture, question/answer
interactions, unsupervised question, exercise and
learner presenting a work.
3.4 Evaluation
Figure 6 presents the graphical user interface of the
learning module used to capture the user interactions
and model the orchestration.
Figure 6: GUI of the learning module.
Once the learning module implemented in the
videoconference system, the performance of the
HMM to correctly orchestrate the video streams has
been evaluated. Table 1 gives an overview of the
video orchestrattion performance per state.
The evaluation was based on K-Cross Validation
(K=10). For 10 sequences, 24 observations for each
one, we have in total 209 observations that have
been well decoded and affected to the right state, so
the global rate of a good detection is 0.87 (209/240).
Table 1: Evaluation of the Video Orchestration.
Recall Precision F-measure
Confusion Matrix
for Tutor State
0.97 0.86 0.91
Confusion Matrix
for Class State
0.58 0.92 0.71
Confusion Matrix
for Learner State
0.94 0.86 0.90
4 CONCLUSIONS
The paper highlights the interest of a learning
module in the context of video orchestration with
two main objectives: In the first hand enable user
intent based programming to enhance the
interactivity and the attentional immersion. In the
other hand maintain good technical results. In
addition to the learning module, the orchestration
system was enhanced by a classification module
enabling automatic detection of the appropriate
scenario to make the orchestrator more flexible and
more dynamic.
The next important step will consist in the usability
evaluation. Qualitatively, the capability offers to the
user to create or modify the video orchestration has
to be evaluated in term of acceptance and interest. A
lot of questions have to be considered, for instance:
Did the user interact at ease with the module? Did he
appreciate the use? Can we give to the user a total
freedom in video orchestration? … A whole session
for user testing will be organized in order to study
usuability issues.
REFERENCES
Lavee G., Rivlin E., and Rudzsky M., “Understanding
Video Events: A Survey of Methods for Automatic
Interpretation of Semantic Occurrences in Video,”
Systems, Man, and Cybernetics, Part C: Applications
and Reviews, IEEE Transactions on, vol. 39, no. 5, pp.
489 –504, Sep. 2009.
Mayer, R. E., 2001, “Multimedia learning.” Cambridge
University Press.
Engleberg, I. N. and Wynn D. R., 2006, Working in
Groups: Communication Principles and Strategies.
Al-Hames M., Dielmann A., Gatica-Perez D., Reiter S.,
Renals S., Rigoll G., and Zhang D., 2006,
SmartVideoOrchestrationforImmersiveCommunication
755

“Multimodal Integration for Meeting Group Action
Segmentation and Recognition,” in Machine Learning
for Multimodal Interaction, vol. 3869, Springer Berlin
Heidelberg, 2006, pp. 52–63.
Al-Hames M., Hörnler B., Scheuermann C., and Rigoll G.,
2006, “Using Audio, Visual, and Lexical Features in a
Multi-modal Virtual Meeting Director,” in Machine
Learning for Multimodal Interaction, vol. 4299, S.
Renals, S. Bengio, and J. G. Fiscus, Eds. Berlin,
Heidelberg: Springer Berlin Heidelberg, 2006, pp.
63–74.
Hörnler B., Arsic D., Schuller B., and Rigoll G., 2009,
“Boosting multi-modal camera selection with semantic
features,” in Proceedings of the 2009 IEEE
international conference on Multimedia and Expo,
Piscataway, NJ, USA, 2009, pp. 1298–1301.
Al-Hames M., Hornler B., Muller R., Schenk J., and
Rigoll G., 2007, “Automatic Multi-Modal Meeting
Camera Selection for Video-Conferences and Meeting
Browsers,” in Multimedia and Expo, 2007 IEEE
International Conference on, 2007, pp. 2074 –2077.
Ding Y. and Fan G., 2006, “Camera View-Based
American Football Video Analysis,” in Multimedia,
2006. ISM’06. Eighth IEEE International Symposium
on, 2006, pp. 317 –322.
Fourati N., Marilly E., 2012, “Gestures for natural
interaction with video”, Electronic Imaging 2012, Jan.
2012, Proceedings of SPIE Vol. 8305.
Cheung S. and Kamath C., 2004, ”Robust techniques for
background subtraction in urban traffic video”
Electronic Imaging: Visual Communications and
Image, San Jose, California, January 20-22 2004.
Hromada D., Tijus C., Poitrenaud S., Nadel J., 2010,
"Zygomatic Smile Detection: The Semi-Supervised
Haar Training of a Fast and Frugal System" in IEEE
International Conference on Research, Innovation and
Vision for the Future - RIVF , 2010.
O'Gorman L., 2010, Latency in Speech Feature Analysis
for Telepresence Event Coding" in 20th International
Conference on Pattern Recognition (ICPR), Aug.
2010.
Huang X. D., Ariki Y., and Jack M. A., 1990, “Hidden
Markov Model for Speech Recognition.” Edmgurgh
Univ. Press, 1990.
Viterbi A., “Error bounds for convolutional codes and an
asymptotically optimum decoding algorithm,”
Information Theory, IEEE Transactions on, vol. 13,
no. 2, pp. 260 –269, Apr. 1967.
Dempster A. P., Laird N. M., and Rubin D. B., 1977,
“Maximum likelihood from incomplete data via the
EM algorithm,” Journal of the Royal statistical
Society, Series B, vol. 39, no. 1, pp. 1–38, 1977.
Baum L. E., Petrie T., Soules G., and Weiss N., 1970, “A
Maximization Technique Occurring in the Statistical
Analysis of Probabilistic Functions of Markov
Chains,” The Annals of Mathematical Statistics, vol.
41, no. 1, pp. 164–171, Feb. 1970.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
756
