
Multi-purpose Electrostimulator Software
Nuno Costa
1
, Tiago Araujo
1,2
, Neuza Nunes
2
and Hugo Gamboa
1,2
1
CEFITEC, Departamento de Física, FCT, Universidade Nova de Lisboa, Lisbon, Portugal
2
PLUX - Wireless Biosignals S.A., Lisbon, Portugal
Keywords:
Human Computer Interaction, Electrostimulation, Multi-purpose Software.
Abstract:
Nowadays, most of the software for electrostimulation is made with specific purposes, and in some cases
they have complicated user interfaces and large, bulky designs that deter usability and acceptability. A novel
Human Computer Interaction framework was developed enabling the end user to configure and control an
electrostimulator, surpassing the specific use of several electrostimulator software. In the configuration the
user is able to compile different types of electrical impulses (modes) in a temporal session, and this session
can be actuated in the control. To help the user in creating any type of protocol (session) we devised three
standard impulse generator (rectangular, sin and triangular) and a new way of creating electrical impulses by
drawing, then fitting this data and process it with a mathematical algorithm for finding simple equations to
describe the data. With it, the user has the possibility to choose the best equation that fits the draw and store
it mathematically structured, thus adding not only a draw editor, but also an equation editor. Therefore, we
provide a tool for clinical, sports and investigation where the user is free to produce their own protocols by
sequentially compile electrical impulses.
1 INTRODUCTION
In 1791, scientist Luigi Galvani showed that electric-
ity, when applied to a frog’s leg, could cause muscle
twitches (Piccolino, 1998). In the intervening cen-
turies, scientists learned much about how Electrical
Stimulation or Electrostimulation (ES) affects mus-
cle tissue and have tried to apply that knowledge to
muscles paralysed by neuromuscular disease to cre-
ate both therapeutic and functional effect. This field
Device
Mode
Actuation
Control
Session
Configuration
(Electrostimulator)
(Impulse generator)
(Mode compiler)
Specialized
Professionals
Patients
Basic users
Figure 1: Generic diagram of the HCI.
of medicine is known variously as Electrical Mus-
cle Stimulation or Electromyostimulation (EMS),
Neuromuscular Electrical Stimulation (NMES) and
Functional Electrical Stimulation (FES) electromyos-
timulation, consisting in nerve manipulation through
electrical pulses aiming muscular contraction or sen-
sory response for distinct applications (Malmivuo and
Plonsey, 1996). Nowadays, the applications can be
divided in two main areas:
• Electrotherapy: Rehabilitation (Von Lewinski
et al., 2009); Spinal cord injury, stroke, sensory
deficits, and neurological disorders (with Neural
prostheses) (Cogan, 2008); and many others.
• Physical Conditioning: fitness; active recovery;
optimizing physical performance by improvement
of maximum strength of a muscle (muscular
tonus) in less time (Siff, 1990).
Although ES may hold much promise there are
many technical challenges that need to be surpassed.
Commercial software solutions for electrostimulators
grow every day, but these are often limited by a va-
riety of factors including cost, source code inaccessi-
bility, hardware compatibility, and more (Keller et al.,
2002). Consequently, a strong tradition in scien-
tific research is to write custom software routines.
While superb for the specific tasks at hand, these
225
Costa N., Araujo T., Nunes N. and Gamboa H..
Multi-purpose Electrostimulator Software.
DOI: 10.5220/0004241002250230
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2013), pages 225-230
ISBN: 978-989-8565-34-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
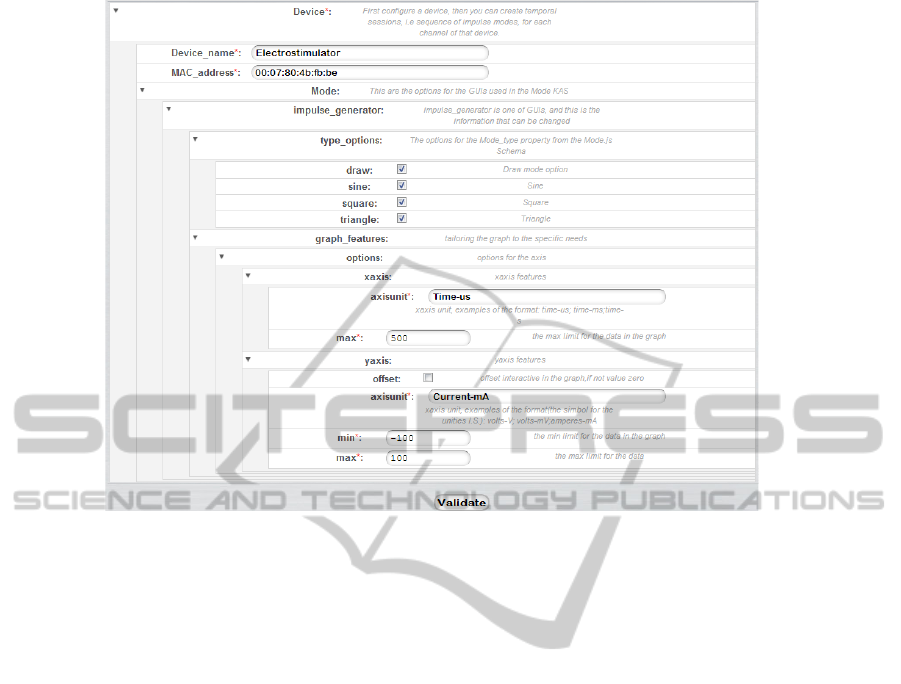
Figure 2: Device Configuration for the Electrostimulator used to test the software.
custom solutions rarely offer the flexibility and ex-
tensibility needed for them to be transferable across
platforms, hardware configurations, and experimental
paradigms without significant modifications. There-
fore, in present time, software/hardware solutions to
provide a device with a multi-purpose platform (sport,
therapy or investigation), a dynamic software, which
enables the user to create their own protocols, is
needed (Suter et al., 2010). To contribute in solving
this necessity, we created a WEB based Human Com-
puter Interaction (HCI) that allows the user to employ
the software in different types of ES applications, pur-
suing a non-specific software.
This paper further depicts this novel HCI based on
a dynamic Knowledge Acquisition System developed
previously enabling the fast re-edition of configura-
tions if needed (Costa et al., 2012). The specific focus
of this tool is to compile electrical impulses in differ-
ent sessions for actuation of an electrostimulator, en-
abling the user to design particular types of protocols.
To surpass this challenge, innovative ways of compile
and create electrical impulses were implemented.
The next sections are divided in: Human Com-
puter Interaction, a resume of the structure developed
in a previous study; Configuration, a description of
the methods provided to the user to compile electrical
impulses; Control, a brief description of the simplic-
ity in actuate a session.
2 HUMAN COMPUTER
INTERACTION
A novel Human Computer Interaction was developed
with the intention of controlling the actuation of elec-
trical devices, like Biosignals Acquisition Systems,
LEDs, motors, between others. Nevertheless, to show
the potential of the tool, the biggest and the first chal-
lenge that led us to idealize it, was to control an elec-
trostimulator for different types of applications. To
demonstrate it, this article shows the capabilities of
the software in controlling an electrostimulator and
the contribution for Electrostimulation.
The HCI is integrated in a WEB based software
for biosignals acquisition and processing from PLUX
- Wireless Biosignals, S.A., enabling the control of a
generic device. In this way, actuation, acquisition and
processing will be possible in a closed-loop cycle.
In Biomedicine, the configuration of a device
should only be performed by clinical experts, where
they can adapt sessions to each patient. Overly com-
plicated user interfaces and large, bulky designs can
deter users from operate the device on a day to day
basis. For example, home health care devices should
have sessions previously programmed enabling the
patient to only start or stop a session prepared for
him, and restrict the software to this purpose because
patients can’t be allowed to configure or change any
BIODEVICES2013-InternationalConferenceonBiomedicalElectronicsandDevices
226
a)
b)
c)
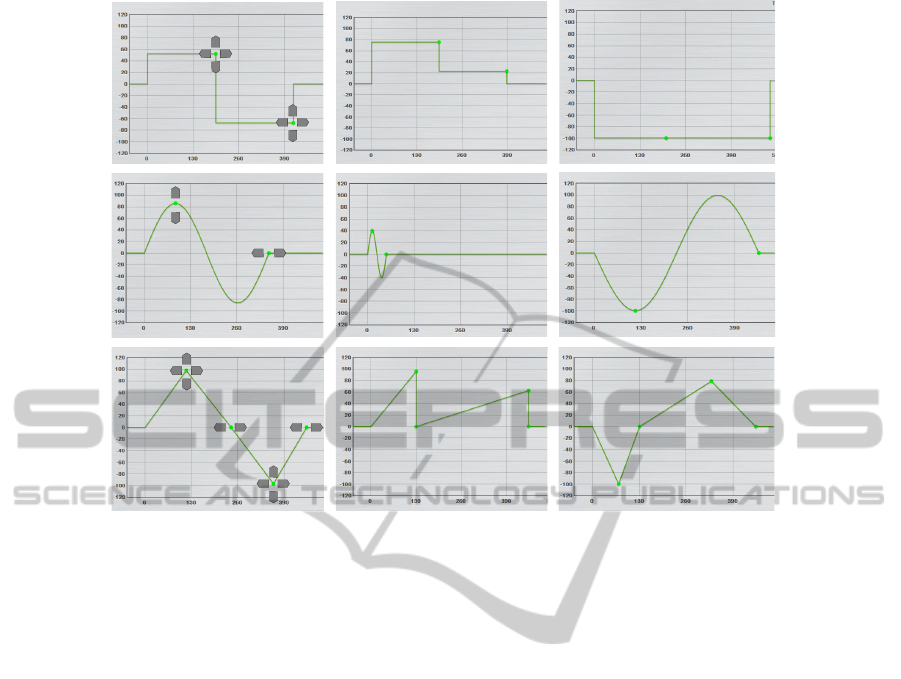
Figure 3: Example of the default impulses with the restrictions specified in the Device Configuration: a)square, b)sine and
c)triangle. The arrows mark the direction in which the interactive points can be moved. In each row are presented examples
of the respective impulse after moving the interactive points.
parameter in the software. Thus, to economize time,
simplify interfaces, automate the device actuation and
separate this tool for experts and non-experts the soft-
ware was divided in Configuration and Control. Ba-
sically, as shown in Figure 1, to control we need to
configure the electrostimulator, and create temporal
sessions, i.e. sequence of impulse modes, for each
channel of that device. Consequently, the configura-
tion is hierarchically structured in device, mode and
session. In the control we only need to choose the de-
vice and connect to it, if connected chose the session
to setup the hardware, then start the session. The stop
can be manual or automatic (end of the session).
3 CONFIGURATION
3.1 Device Requisites
In the case of an electrostimulator, some specific op-
tions need to be satisfied. The specifications for the
potentials and limits of ES is dependent of the ap-
plication and the electrostimulator. The requisites of
the electrostimulator we used for this project, are:
MAC Address, "00:07:80:4b:fb:be"; Pulse amplitude,
0-100 mA (1 mA step); Pulse Width, 0-500 µs (5 µs
step); Pulse frequency, 1-200 Hz (1 Hz step); Number
of channels, 2; Number of modes, 4; Waveform type,
Rectangular, triangular, sinusoidal, customized wave-
form (constant potential with no offset). In this way,
Figure 2 represents the Device Configuration with the
above requirements.
3.2 Mode
After the specification of the device requisites the user
can project a new mode for a specific device. The
mode permits four types of impulse configuration:
square, rectangular pulse that can be changed within
the data limits; sine, sin pulse that can be changed
within the data limits; triangle, triangular pulse that
can be changed within the data limits; draw, a novel
and innovative impulse generator. The user is also
able to choose the frequency (impulse per second) by
moving a slider.
In the three default types square, sine and triangle,
the user have to click and pull the interactive points.
Examples of the three types are shown in Figure 3,
each row represents an example of the respective im-
pulse after moving the interactive points. These types
allow the end user to create a lot of different impulses,
but to be able of creating any type we had to devise a
new form of impulse generation, the draw method.
In this new type, the user has the possibility to
Multi-purposeElectrostimulatorSoftware
227
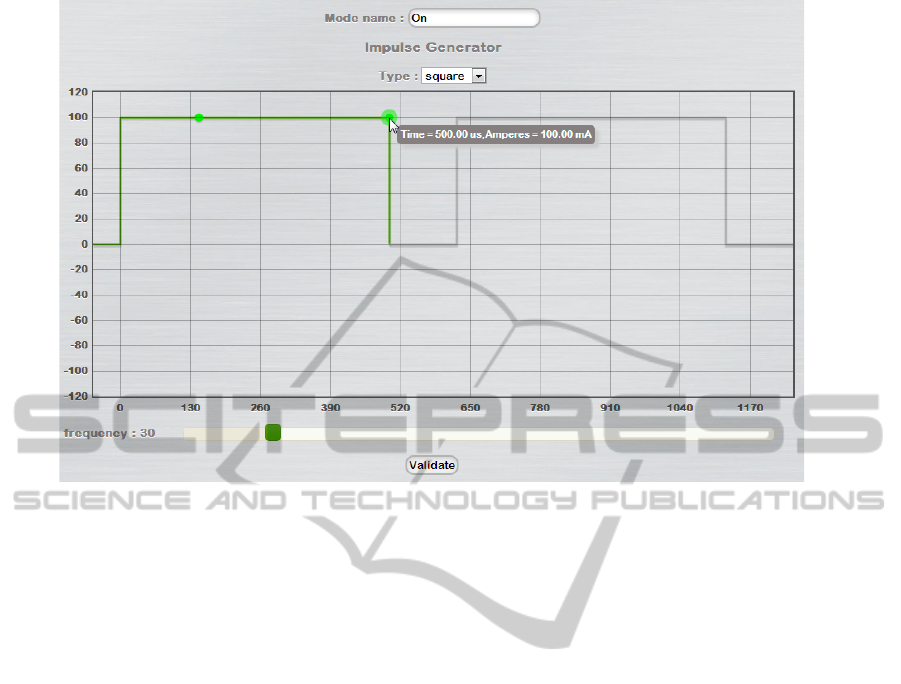
Figure 4: Configuration of the mode "On" for the Electrostimulator. Initial version of the software.
draw an impulse within the data limits, from this draw
we retrieve 100 points that will be processed by an al-
gorithm. The idea behind this algorithm it is to search
within the 100 points that seem connected to each
other, then propose a series of simple equations to de-
scribe the links. The best are selected, tweaked, and
again tested against the data. Next, the algorithm re-
peats the cycle over and over, until it finds equations
that have a good probability of modulate the data.
Then, by choosing one of the equations, the user can
see a graph with 100 points based in the equation and
compare it to the drawing. If it fits the user objectives,
save the equation, if not, the user can tweak the equa-
tion manually, and see the effects, or just save the 100
points from the draw. This algorithm will have large
benefits when finished, because it provides a mecha-
nism of storing the draw data mathematically struc-
tured, in this way, the user will have the possibility
of re-editing the data by changing some parameters in
the stored equations. So, instead of just providing a
draw method to create impulses, an equation method
is also available, with great relevance by simplifying
the impulse generation when the impulse can be de-
scribed by an equation and only few parameters need
to be changed.
This algorithm is still in the initial stage and is
based in the work of Schmidt and Lipson, the Eu-
reqa, a highly praised symbolic regression program
(Stoutemyer, 2012).
In Figure 4 is possible to view an example of how
a mode can be configured within the data limits for x
axis 0 - 500 µs and for y axis -100 - 100 mA . The fig-
ure shows the creation of "On" mode for the electros-
timulator, a rectangular pulse with 500 µs, amplitude
100 mA, and 20 Hz of pulse frequency, i.e. 20 pulses
per second.
3.3 Session
The user can create a new session for a specific
device. A session is a sequence of modes, and
each channel of a device can have one session pro-
grammed. A device has a maximum number of pro-
grammable modes, but they can be repeated infinitely.
This mechanism is very important to program stim-
ulation protocols, automating the control. Figure 5
shows an example of session configuration. Primar-
ily, the definition of the modes that will be used, four
is the maximum that the hardware can memorize. Af-
terwards, the creation of a session for the channels re-
quired, in this case, only one channel is programmed
with two modes: On, 300 seconds activated and, Off,
during 100 seconds (Off is a pulse with 500 µs and
amplitude 0 mA). This sequence is repeated during
half an hour by activating the loop for that specific
session.
Additionally, we remark that each configuration
presented is not static, input new fields, re-edit or
delete is fast and simple due to the dynamic Knowl-
edge Acquisition System implemented for the HCI.
A very important mechanism to optimize and adapt
quickly the software, especially the configuration
BIODEVICES2013-InternationalConferenceonBiomedicalElectronicsandDevices
228
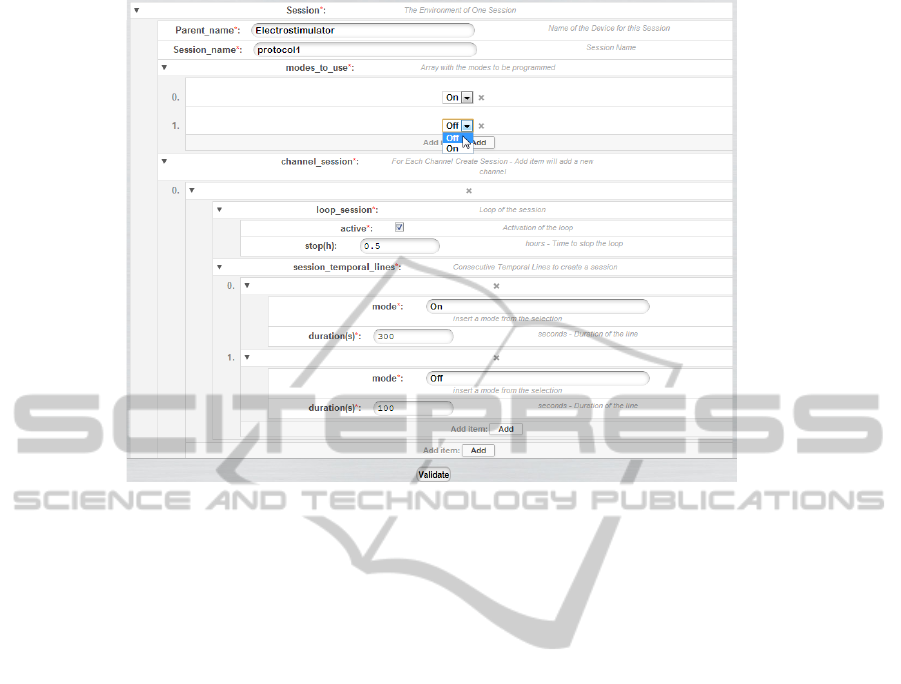
Figure 5: Configuration of one channel session with the modes "On" and "Off". Initial version of the software.
(Costa et al., 2012).
4 CONTROL
Control is the division for actuation and acquisition of
biosignals. In here, the user first needs to choose the
device, in our case the electrostimulator, and the ses-
sion to program. When the device is ready, start/stop
of the session is feasible. In the course of the session
is possible to acquire real time biosignals and syn-
chronize them with the session.
Figure 6 presents the Control environment, di-
vided in Setup and Actuation. In the Setup the user
picks one of the devices configured, connects using
the MAC address defined in the Device Configura-
tion, then chooses the session to program in the Hard-
ware. If the hardware is correctly set up, start/stop
and information of the session for each channel are
available within the Actuation.
The control area will have many device sessions
templates. Therefore, a quick approach by the user
will enable the simple selection of a pre-defined ses-
sion and start the actuation immediately.
5 CONCLUSIONS
A strong tradition in neurophysiology research is to
write custom software routines. These software are
specific and rarely offer the flexibility and exten-
sibility needed for them to be transferable across
platforms, hardware configurations, and experimen-
tal paradigms without significant modifications. Also,
most of the times these software have confuse, large
and bulky interfaces that can deter users from using
the software. Electrostimulation is one of the areas
that suffers from these problems. For these reasons,
and pursuing usability and acceptability, we are devel-
oping a HCI that has a great potential to be transfer-
able across different types of electrical device control,
and to demonstrate it, we are able to produce different
types of sessions to control the actuation of an elec-
trostimulator.
For this purpose we provide mechanisms to con-
figure and control a device. The most important
mechanisms are: the separation in Configuration and
Control; Configuration, where clinical professionals
can configure a device with sessions for each channel
trough the compilation of electric impulses; Control,
where the user just needs to choose the device and
session (set up the device) then simply start/stop the
session prepared in the configuration; the sequence of
configuration (Device, Mode, Sessions), that supplies
the user with a structured configuration; the tools in
Mode, enabling the end user to shape the impulses at
is own desire, and with the draw, plus equation algo-
rithm, implemented the user will be able to produce
any kind of impulse and store information mathemat-
ically structured; the compilation of modes in Ses-
sion allowing the creation of temporal sessions for
Multi-purposeElectrostimulatorSoftware
229
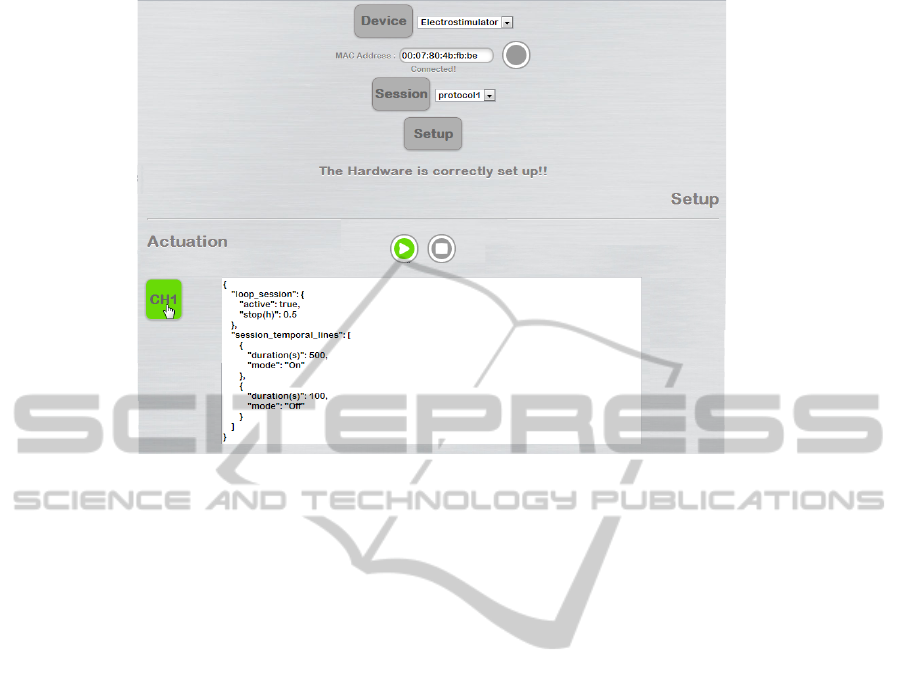
Figure 6: Control environment using the Electrostimulator defined in the configuration and session "protocol1".
the actuation of an electrostimulator, i.e. permits to
program stimulation protocols. Thus, creating a dy-
namic, flexible way of automate the actuation of stim-
uli.
Depending on the stakeholder the combination
Configuration-Control will change. Configuration
will be enabled, disabled or will have different levels
of restrictions. In the Control area different devices
and sessions will be programmed by default for a fast
approach by the user (setup the device then start/stop
the session). Ideally, the various envisioned users
should be consulted on whether they would be open
to use such a software package and, if so, under what
restrictions. Interviews or questionnaires will be suit-
able instruments for this. We hope this could be the
foundation for building a business model and further
develop ideas on how to penetrate the market.
We also provide a tool to generate dynamic con-
figurations, that are fast and simple to re-edited.
Therefore, if for example the configurations described
in this article are not optimized to configure a specific
electrostimulator we can easily optimized them.
With this powerful tool we provide a user-friendly
software solution with a multi-purpose platform for
sport, therapy and research.
REFERENCES
Cogan, S. (2008). Neural stimulation and recording elec-
trodes. Annu. Rev. Biomed. Eng., 10:275–309.
Costa, N., Araújo, T., Nunes, N., and Gamboa, H. (2012).
Knowledge acquisition system based on json schema
- implementation of a hci for actuation of biosignals
acquisition systems. In Cabello, E., Virvou, M., Obai-
dat, M. S., Caldeirinha, R. F. S., Ji, H., and Vergados,
D. D., editors, SIGMAP, pages 255–262. SciTePress.
Keller, T., Popovic, M., Pappas, I., and Müller, P. (2002).
Transcutaneous functional electrical stimulator “com-
pex motion”. Artificial organs, 26(3):219–223.
Malmivuo, J. and Plonsey, R. (1996). Bioelectromagnetism,
volume 34. Peter Peregrinus LTD.
Piccolino, M. (1998). Animal electricity and the birth of
electrophysiology: the legacy of luigi galvani. Brain
research bulletin, 46(5):381–407.
Siff, M. (1990). Applications of electrostimulation in phys-
ical conditioning: a review. The Journal of Strength &
Conditioning Research, 4(1):20.
Stoutemyer, D. (2012). Can the eureqa symbolic regres-
sion program, computer algebra and numerical analy-
sis help each other? Arxiv preprint arXiv:1203.1023.
Suter, B. A., O’Connor, T., Iyer, V., Petreanu, L. T., Hooks,
B. M., Kiritani, T., Svoboda, K., and Shepherd, G.
M. G. (2010). Ephus: multipurpose data acquisition
software for neuroscience experiments. Frontiers in
Neural Circuits, 4:100.
Von Lewinski, F., Hofer, S., Kaus, J., Merboldt, K.,
Rothkegel, H., Schweizer, R., Liebetanz, D., Frahm,
J., and Paulus, W. (2009). Efficacy of emg-triggered
electrical arm stimulation in chronic hemiparetic
stroke patients. Restorative Neurology and Neuro-
science, 27(3):189–197.
BIODEVICES2013-InternationalConferenceonBiomedicalElectronicsandDevices
230
