
How Women Think Robots Perceive Them – as if Robots were Men
Matthijs A. Pontier and Johan F. Hoorn
Center for Advanced Media Research Amsterdam (CAMeRA@VU) / The Network Institute, VU University,
De Boelelaan 1081, 1081HV, Amsterdam, The Netherlands,
Keywords: Cognitive Modeling, Emotion Modeling, Human-computer Interaction, Turing Test, Virtual Agents.
Abstract: In previous studies, we developed an empirical account of user engagement with software agents. We
formalized this model, tested it for internal consistency, and implemented it into a series of software agents
to have them build up an affective relationship with their users. In addition, we equipped the agents with a
module for affective decision-making, as well as the capability to generate a series of emotions (e.g., joy
and anger). As follow-up of a successful pilot study with real users, the current paper employs a non-naïve
version of a Turing Test to compare an agent’s affective performance with that of a human. We compared
the performance of an agent equipped with our cognitive model to the performance of a human that
controlled the agent in a Wizard of Oz condition during a speed-dating experiment in which participants
were told they were dealing with a robot in both conditions. Participants did not detect any differences
between the two conditions in the emotions the agent experienced and in the way he supposedly perceived
the participants. As is, our model can be used for designing believable virtual agents or humanoid robots on
the surface level of emotion expression.
1 INTRODUCTION
1.1 Background
There is a growing interest in developing embodied
agents and robots. They can make games more
interesting, accommodate those who are lonely,
provide health advice, make online instructions
livelier, and can be useful for coaching, counselling,
and self-help therapy. In extreme circumstances,
robots can also be the better self of human operators
in executing dangerous tasks.
For a long time, agents and social robots were
mainly developed from a technical point of view but
we now know it is not a matter of technology alone.
Theories and models of human life are also important
to explain communication rules, social interaction and
perception, or the appraisal of certain social situations.
In media psychology, mediated interpersonal
communication and human-computer interaction,
emotions play a salient role and cover an important
area of research (Konijn and Van Vugt, 2008).
The idea of affective computing (Picard, 1997) is
that computers ‘have’ emotions, and detect and
understand user emotions to respond appropriately to
the user. Virtual agents who show emotions may
increase the user’s likeability of a system. The
positive effects of showing empathetic emotions are
repeatedly demonstrated in human-human
communication (e.g., Konijn and Van Vugt, 2008)
and are even seen as one of the functions of emotional
display. Such positive effects may also hold when
communicating with a virtual agent. Users may feel
emotionally attached to virtual agents who portray
emotions, and interacting with such “emotional”
embodied computer systems may positively influence
their perceptions of humanness, trustworthiness, and
believability. User frustration may be reduced if
computers consider the user’s emotions (Konijn and
Van Vugt, 2008). A study by Brave et al. (2005)
showed that virtual agents in a blackjack computer
game who showed empathic emotions were rated
more positively, received greater likeability and
trustworthiness, and were perceived with greater
caring and support capabilities than virtual agents not
showing empathy.
Compared to human affective complexity,
contemporary affective behavior of software agents
and robots is still quite simple. In anticipation of
emotionally more productive interactions between
user and agent, we looked at various models of
human affect-generation and affect-regulation, to see
how affective agent behavior can be improved.
496
A. Pontier M. and F. Hoorn J..
How Women Think Robots Perceive Them – as if Robots were Men.
DOI: 10.5220/0004253504960504
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 496-504
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
1.2 From Theories to Computation
Previous work described how certain dimensions of
synthetic character design were perceived by users
and how they responded to them (Van Vugt et al.,
2009). A series of user studies into human-agent
interaction resulted into an empirically validated
framework called Interactively Perceiving and
Experiencing Fictional Characters (I-PEFiC). I-
PEFiC explains the individual contributions and the
interactions of an agent’s Affordances, Ethics,
Aesthetics, facial Similarity, and Realism to the Use
Intentions and Engagement of the human user. To
date, this framework has an explanatory as well as a
heuristic value because the extracted guidelines are
important for anyone who designs virtual characters.
In a simulation study (Hoorn et al., 2008), we
were capable of formalizing the I-PEFiC framework
and make it the basic mechanism of how agents and
robots build up affect for their human users. In
addition, we designed a special module for affective
decision-making (ADM) that made it possible for
the agent to select actions in favor or against its user,
hence I-PEFiC
ADM
.
To advance I-PEFiC
ADM
in the area of emotion
regulation, we also looked at other models of affect
(Bosse et al., 2010). Gratch and Marsella (2009)
formalized the theory of Emotion and Adaptation of
Smith and Lazarus (1990) into EMA, to create
agents that cope with negative affect. The emotion-
regulation theory of Gross (2001) inspired Bosse et
al., (2007) to develop CoMERG (the Cognitive
Model for Emotion Regulation based on Gross).
Together, these approaches cover a large part of
appraisal-based emotion theory (Frijda et al.,) and all
three boil down to appraisal models of emotion. We
therefore decided to integrate these three affect
models into a model we called Silicon Coppélia
(Pontier and Siddiqui, 2009; Hoorn et al., 2012).
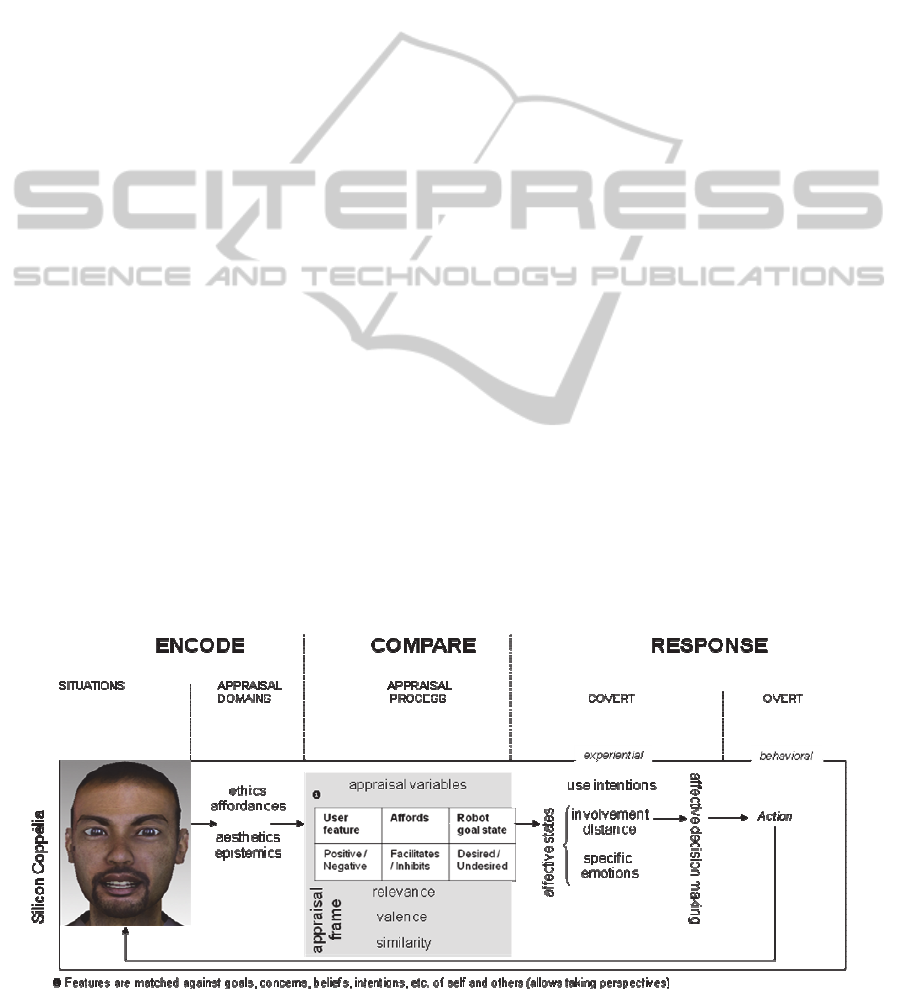
Figure 1 shows Silicon Coppélia in a graphical
format.
Silicon Coppélia consists of a loop with a
situation as input, and actions as output, leading to a
new situation. This loop consists of three phases: (1)
encoding, (2) comparison, and (3) response.
In the encoding phase, the agent perceives other
agents (whether human or synthetic) in terms of
Ethics (good vs. bad), Affordances (aid vs. obstacle),
Aesthetics (beautiful vs. ugly), and Epistemics
(realistic vs. unrealistic). The agent can be biased in
this perception process, because it is equipped with
desires that have a certain strength for achieving or
preventing pre-defined goal-states (‘get a date’, ‘be
honest’ and ‘connect well’).
In the comparison phase, the agent retrieves
beliefs about actions facilitating or inhibiting the
desired or undesired goal-states to calculate a general
expected utility of each action. Further, agent uses
certain appraisal variables, such as the belief that
someone is responsible for accomplishing goal-states
or not. These variables and the perceived features of
others are appraised for Relevance (relevant or
irrelevant) and Valence to the agent’s goals and
concerns (positive or negative outcome expectancies).
In the response phase of the model, the resulting
appraisals lead to processes of Involvement and
Distance towards the other, and to the emergence of
certain Use Intentions: The agent’s willingness to
employ the other as a tool to achieve its own goals.
Note that both overt (behavioral) and covert
(experiential) responses can be executed in this phase.
Emotions such as hope, joy, and anger are generated
using appraisal variables such as the perceived
likelihood of goal-states. The agent uses an affective
Figure 1: Graphical Representation of Silicon Coppelia.
HowWomenThinkRobotsPerceiveThem-asifRobotswereMen
497

decision-making module to calculate the expected
satisfaction of possible actions. In this module,
affective influences and rational influences are
combined in the decision-making process.
Involvement and Distance represent the affective
influences, whereas Use Intentions and general
expected utility represent the more rational influences.
When the agent selects and performs an action, a new
situation emerges, and the model
starts at the first
phase again.
1.3 Speed-dating as a New Turing-test
In previous research we developed a speed-dating
application as a testbed for cognitive models
(Pontier et al., 2010). In this application, the user
interacted with Tom, a virtual agent on a Website.
We opted for a speed-dating application, because
we expected this domain to be especially useful for
testing emotion models. The emotionally laden
setting of the speed-date simplified asking the user
what Tom would think of them, ethically,
aesthetically, and whether they believed the other
would want to see them again, etc. Further, in a
speed-date there usually is a relatively limited
interaction space; also in our application, where we
made use of multiple choice responses. This was
done to equalize the difference between a human
and our model in the richness of interaction, which
was not our research focus. We wanted the
difference to be based on the success or failure of
our human-like emotion simulations.
We chose to confront female participants with a
male agent, because we expected that the limitations
in richness of behavior in the experiment would be
more easily accepted from a male agent than from a
female one. Previous research suggests that men
usually have more limited forms of emotional
interaction and that women are usually better
equipped to do an emotional assessment of others
(Barret et al., 1998). By means of a questionnaire,
the participants diagnosed the emotional behavior,
and the cognitive structure behind that behavior,
simulated by our model, or performed by a
“puppeteer” controlling Tom.
A pilot study (Pontier et al., 2010) showed that
users recognized at least certain forms of human
affective behavior in Tom. Via a questionnaire, users
diagnosed for us how Tom perceived them and
whether they recognized human-like affective
mechanisms in Tom. Although Tom did not
explicitly talk about it, the participants recognized
human-like perception mechanisms in Tom’s
behavior. This finding was a first indication that our
software had a humanoid way of assessing humans,
not merely other software agents.
These results made us conduct a follow-up
‘Wizard of Oz’ (Landauer, 1987) experiment with
54 participants. In this experiment we compared the
performance of Tom equipped with Silicon Coppélia
to the performance of a human controlling Tom as a
puppeteer. This experiment may count as an
advanced version of a Turing Test (Turing, 1950).
In a Turing Test, however, participants are
routinely asked whether they think the interaction
partner is a human or a robot. In this experiment,
however, we did not ask them so directly. After all,
because of the limited interaction possibilities of a
computer interface, the behavior of Tom may not
seem very human-like. Therefore, all participants
would probably have thought Tom was a robot, and
not a human, making it impossible to measure any
differences. Therefore, we introduced the speed-
dating partner as a robot to see whether humans
would recognize human affective structures equally
well in the software and in the puppeteer condition.
Further, when testing the effect of a virtual
interaction partner on humans, participants are usually
asked how they experience the character. In this
experiment, however, we asked people how they
thought the character perceived them. Thus, the
participants served as a diagnostic instrument to assess
the emotional behavior of Tom, and to detect for us the
cognitive structure behind that behavior. This way, we
could check the differences between our model and a
human in producing emotional behavior, and the
cognitive structure responsible for that behavior.
We hypothesized that we would not find any
differences between the behavior of Tom controlled
by our model and that of Tom controlled by a
human, indicating the success of Silicon Coppélia as
a humanoid model of affect generation and
regulation. This would also indicate the aptness of
the theories the model is based on. Because Silicon
Coppélia is computational, this would also be very
interesting for designing applications in which
humans interact with computer agents or robots.
2 METHOD
2.1 Participants
A total of 54 Dutch female heterosexual students
ranging from 18-26 years of age (M=20.07,
SD=1.88) volunteered for course credits or money (5
Euros). Participants were asked to rate their
experience in dating and computer-mediated
communication on a scale from 0 to 5. Participants
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
498

communicated frequently via a computer (M = 4.02,
SD = 1.00) but appeared to have little experience in
online dating (M = .33, SD = .80).
2.2 Materials:
Speed-dating Application
We designed a speed-date application in which users
could interact with a virtual agent, named Tom, to
get acquainted and make an appointment. The dating
partner was represented by Tom, an avatar created in
Haptek’s PeoplePutty software.
Tom is capable of simulating five emotions:
hope, fear, joy, distress, and anger, which were
expressed through the face of the avatar with either a
low or a high intensity. This depended on little or
much relevance of user choices to Tom’s goals and
concerns. Like this, we created 32 (2
5
) different
emotional states in PeoplePutty; one for each
possible combination of two levels of intensity of
the five simulated emotions.
We created a Web page for the application (see
Figure 2), in which the virtual agent was embedded
as a Haptek player. We used JavaScript in
combination with scripting commands provided by
the Haptek software, to control the Haptek player
within the Web browser. In the middle of the Web
site, the affective conversational agent was shown,
communicating messages through a voice
synthesizer (e.g., “Do you have many hobbies?”)
and additionally shown as text right above the
avatar. Figure 2 shows that the avatar looks annoyed
in response to the user’s reply “Well, that’s none of
your business”.
Figure 2: The speed-dating application.
During the speed-date, partners could converse
about seven topics: (1) Family, (2) Sports, (3)
Appearance, (4) Hobbies, (5) Music, (6) Food, and
(7) Relationships. For each topic, the dating partners
went through an interaction tree with responses that
they could select from a dropdown box. To give an
idea of what the interaction trees look like, we
inserted the tree for Relationships in the Appendix.
When the ‘start speed-date’ button above the text
area was pressed, Tom introduced himself and
started by asking the user a question. The user
selected an answer from the dropdown box below
Tom. Then Tom responded and so on until the
interaction-tree was traversed. When a topic was
done, the user could select a new topic or let Tom
select one. When all topics were completed, the
message “the speed-dating session is over” was
displayed and the user was asked to fill out the
questionnaire.
In the speed-dating application, Tom perceived
the user according to Silicon Coppélia (Hoorn et al.,
2012). Tom had beliefs that features of the user
influenced certain goal-states in the world. For our
speed-date setting, the possible goal-states were ‘get
a date’, ‘be honest’, and ‘connecting well’ on each
of the conversation topics. Tom had beliefs about the
facilitation of these goal-states by each possible
response. Further, Tom attached a general level of
positivity and negativity to each response.
During the speed-date, Tom updated its
perception of the user based on her responses during
the speed-date, as described in (Pontier et al., 2010).
The assessed Ethics, Aesthetics, Realism, and
Affordances of the user led, while matching these
aspects with the goals of Tom, to Involvement and
Distance towards the human user and a general
expected utility of each action. Each time, Tom
selected its response from a number of options. The
expected satisfaction of each possible response was
calculated based on the Involvement and Distance
towards the user and the general expected utility of
the response, using the following formula:
ExpectedSatisfaction
(Action)
=
w
eu
* GEU
(Action)
+
w
pos
* (1 - abs(positivity – bias
I
* Involvement)) +
w
neg
* (1 - abs(negativity – bias
D
* Distance))
Tom searched for an action with the level of
positivity that came closest to the level of
Involvement, with the level of negativity closest to
the level of Distance, and with the highest expected
utility (GEU). Tom could be biased to favor positive
or negative responses to another agent.
During the speed-date, Tom simulated a series of
emotions, based on the responses given by the user.
Hope and fear were calculated each time the user
gave an answer. Hope and fear of Tom were based
on the perceived likelihood that he would get a
HowWomenThinkRobotsPerceiveThem-asifRobotswereMen
499

follow-up date. The joy and distress of Tom were
based on achieving desired or undesired goal-states
or not. The anger of Tom was calculated using the
assumed responsibility of the human user for the
success of the speed-date.
All five emotions implemented into the system
(i.e., hope, fear, joy, distress, and anger) were
simulated in parallel. If the level of emotion was
below a set boundary, a low intensity of the emotion
was facially expressed by Tom. If the level of
emotion was greater or equal than the boundary, a
high intensity of the emotion was expressed by Tom.
2.3 Design
The participants were randomly assigned to two
experimental conditions. In the first condition, Tom
was controlled by Silicon Coppélia, whereas in the
second condition Tom was controlled by a human
trained to handle him (Wizard of Oz condition,
WOz). All participants assumed they were
interacting with a robotic partner; also in the WOz
condition. To have some control over the
idiosyncrasies of a single human controller, the
WOz condition consisted of two identical sub-
conditions with a different human puppeteer in each.
Thus, we had three conditions: (1) Tom was
controlled by Silicon Coppélia (n=27), (2) Human 1
controlled Tom (n=22), (3) Human 2 controlled Tom
(n=5). Taken together, 27 participants interacted
with an agent controlled by a human, and 27
participants interacted with an agent controlled by
our software. This way, the behavior simulated by
our model could be compared to behavior of the
human puppeteers. In other words, this was an
advanced kind of Turing Test where we compared
the cognitive-affective structure between conditions.
In a traditional Turing Test, participants do not know
whether they interact with a computer or not
whereas in our set-up participants were told they
were interacting with a robot to avoid rejection of
the dating partner on the basis of limited interaction
possibilities.
2.4 Procedure
Participants were asked to take place behind a
computer. They were instructed to do a speed-date
session with an avatar. In the WOz, the human
controlling the avatar was behind a wall, and thus
invisible for the participants. After finishing the
speed-dating session of about 10 minutes, the
participants were asked to complete a questionnaire
on the computer. After the experiment, participants
in the WOz were debriefed that they were dating an
avatar controlled by a human.
2.5 Measures
The questionnaire consisted of 97 Likert-type items
with 0-5 rating scales, measuring agreement to
statements. Together there were 15 scales. We
designed five emotion scales for Joy, Anger, Hope,
Fear, and Sadness, based on (Wallbot & Scherer,
1989). We also designed a scale for Situation
Selection, with items such as ‘Tom kept on talking
about the same thing’ and ‘Tom changed the
subject’, and a scale for Affective Decision-Making,
with items such as ‘Tom followed his intuition’ and
‘Tom made rational choices’. For all eight
parameters that were present in the I-PEFiC model
(Ethics, Affordances, Similarity, Relevance,
Valence, Involvement, Distance, Use Intentions), the
questions from previous questionnaires (e.g., Van
Vugt, Hoorn & Konijn, 2009) were adjusted and
reused. However, because of the different
application domain (i.e. speed dating), and because
the questions were now about assessing how Tom
perceived the participant, and not about how the
participant perceived Tom, we found it important to
check the consistency of these scales again.
A scale analysis was performed, in which items
were removed until an optimal Cronbach’s alpha
was found and a minimum scale length of three
items was achieved. If removing an item only
increased Cronbach’s alpha very little, the item was
maintained. After scale analysis, a factor analysis
was performed, to check divergent validity. After
additional items were removed, again a scale
analysis was performed (Appendix). All alphas,
except those for Ethics and Similarity, were between
.74 and .95. The scale for Similarity had an alpha of
.66. Previous studies showed that the present Ethics
scale was consistently reliable, and an important
theoretical factor. Therefore, we decided to maintain
the Ethics scale despite its feeble measurement
quality.
2.6 Statistical Analyses
We performed a multivariate analysis of variance
(MANOVA) on the grand mean scores to scales, to
test whether the participants perceived a difference
in Agent-type (software vs. human controlled). We
performed paired t-tests for related groups of
variables.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
500

3 RESULTS
3.1 Emotions
To analyze the differences in perceived emotions in
the three agent types, we performed a 3x5
multivariate analysis of variance (MANOVA) of the
between-factor Agent-type (3: Silicon Coppélia,
Human1, Human2) and the within-factor of Emotion
(5: Joy, Sadness, Hope, Fear, Anger) on the grand
mean scores to statements. The main effect of
Agent-type on the grand mean scores to emotion
scales was not significant (F
(2, 51)
= 1.68, p < .196),
whereas the main effect of the Emotion factor was
significant (Pillai’s Trace = .64, F
(4, 48)
= 21.59, p <
.001,
2
p
= .64). The interaction between Agent-type
and Emotions was not significant (Pillai’s Trace =
.22, F
(8, 98)
= 1.545, p < .152). More detailed results
can be found in the Appendix.
Because the main effect of Agent-type to
Emotion scales was not significant, this might mean
that there was no effect of emotion at all within a
condition. To check whether emotional behavior was
diagnosed at all by the participants, we performed a
one-sample t-test with 0 as the test value, equalling
no emotions diagnosed. Results showed that all
emotion scales differed significantly from 0. The
smallest t-value was found for Anger (t
(2, 51)
= 8.777,
p < .001).
In addition, the significant main effect of the
Emotion factor suggested that there were systematic
differences in diagnosing emotions in Tom, which
we analyzed by paired samples t-tests for all pairs of
emotions. Out of the 10 thereby originated pairs, 6
pairs differed significantly. The 4 pairs that did not
differ significantly were Joy and Hope (p < .444),
Fear and Sadness (p < .054), Fear and Anger (p <
.908), and Sad and Anger (p < .06). Joy (M = 3.05,
SD = 1.03) and Hope (M = 2.96, SD = .82) were
both recognized relatively much in Tom, whereas
Fear (M=1.04, SD=.80), Sad (M=.84, SD=.66) and
Anger (M=1.02, SD=.86) were recognized little in
Tom.
In other words, the t-tests showed that emotions
were recognized in all conditions, and the
MANOVA showed that participants saw equal
emotions in humans and robots alike.
3.2 Perceptions
To analyze the differences in perceived perceptions
in the three agent-types, we performed a 3x8
MANOVA of the between-factor Agent-type (3:
Silicon Coppélia, Human1, Human2) and the within-
factor of Perception (8: Ethics, Affordances,
Relevance, Valence, Similarity, Involvement,
Distance, Use Intentions) on the grand mean scores
to statements. The main effect of Agent-type on the
perception scale scores was not significant (F < 1),
whereas the main effect of the Perception factor was
significant (Pillai’s Trace = .87, F
(7, 43)
= 39.63, p <
.001,
2
p
= .87). The interaction between Agent-type
and Perception was not significant (Pillai’s Trace =
.18, F
(14, 88)
= .635, p < .828). More detailed results
can be found in the Appendix.
Because the main effect of Agent-type to
Perception scales was not significant, this might
mean that there was no effect of perception at all
within a condition. To check whether the
perceptions of Tom were diagnosed at all by the
participants, we performed a one-sample t-test with
0 as the test value, equalling no perceptions
diagnosed. Results showed that all perception scales
differed significantly from 0. The smallest t-value
was found for Distance (t
(2, 51)
= 15.865, p < .001).
In addition, the significant main effect of the
Perception factor suggested that there were
systematic differences in diagnosing perceptions in
Tom, which we analyzed by paired samples t-tests
for all pairs of perceptions. Out of the 28 thereby
originated pairs, 23 pairs differed significantly. The
pair that differed the most was Ethics and Distance
(t(51) = 13.59, p < .001).
Tom’s perceptions of Ethics (M = 3.86, SD =
.68) and Affordances (M = 3.78, SD = .81) in the
participant were rated the highest. His perceptions of
feeling distant towards the participant (M = 1.77, SD
= .93) were rated the lowest.
In other words, the t-tests showed that
perceptions were recognized in all conditions, and
the MANOVA showed that participants saw equal
perceptions in humans and robots alike.
3.3 Decision-making Behavior
To analyze the differences in perceived decision-
making behavior in the three agent-types, we
performed a 3x2 MANOVA of the between-factor
Agent-type (3: Silicon Coppélia, Human1, Human2)
and the within-factor of Decision-making behavior
(2: Affective decision making, Situation selection)
on the grand mean scores to statements. The main
effect of Agent-type was not significant (F < 1),
whereas the main effect of Decision-making
behavior was small but significant (Pillai’s Trace =
.088, F
(1, 51)
= 4.892, p < .031,
2
p
= .088). The
interaction between Agent-type and Decision-
making behavior was not significant (Pillai’s Trace
HowWomenThinkRobotsPerceiveThem-asifRobotswereMen
501

= .04, F
(2, 51)
= .1.128, p < .332). More detailed
results can be found in the Appendix.
Because the main effect of Agent-type to
Decision-making behavior scales was not
significant, this might mean that there was no effect
of Decision-making behavior at all within a
condition. To check whether decision-making
behavior was diagnosed at all by the participants, we
performed a one-sample t-test with 0 as the test
value, equalling no decision-making behavior
diagnosed. Results showed that both Situation
selection (t
(2, 51)
= 14.562, p < .001) and Affective
decision-making (t
(2, 51)
= 15.518, p < .001) both
differed significantly from 0.
In addition, the significant main effect of the
Perception factor on Agreement suggested that there
were systematic differences in diagnosing
perceptions in Tom, which we analyzed by paired
samples t-test for affective decision-making (M =
2.24, SD = 1.07) and situation selection (M = 1.91,
SD = 1.32). The pair differed significantly (t(53) =
1.776, p < .081).
In other words, the t-tests showed that decision-
making behavior was recognized in all conditions, and
the MANOVA showed that participants saw equal
decision-making behavior in humans and robots alike.
4 DISCUSSION
4.1 Conclusions
In this paper, we equipped a virtual agent with
Silicon Coppélia (Hoorn et al., 2012), a cognitive
model of perception, affection, and affective
decision-making. As an advanced, implicit version
of a Turing Test, we let participants perform a
speed-dating session with Tom, and asked them how
they thought Tom perceived them during the speed-
date. What the participants did not know, was that in
one condition, a human was controlling Tom,
whereas in the other condition, Tom was equipped
with Silicon Coppélia.
A novel element in this experiment was that
participants were asked to imagine how an agent
perceived them. To our knowledge there does not
exist previous research in which participants were
asked to assess the perceptions of an artificial other.
It is a nice finding, that the scales of I-PEFiC (Van
Vugt et al., 2009), which were originally used to ask
how participants perceived an interactive agent,
could be used quite well to ask participants how they
thought Tom perceived them.
The results showed that in this enriched and
elaborated version of the classic Turing Test,
participants did not detect differences between the
two versions of Tom. Not that the variables
measured by the questionnaire did not have any
effect; the effects just did not differ. Thus, within the
boundaries of limited interaction possibilities, the
participants felt that human and software perceived
their moral fiber in the same way, deemed their
relevance the same, and so on. The participants felt
that human and software were equally eager to meet
them again, and exhibited equal ways to select a
situation and to make affective decisions. Also, the
emotions the participants perceived in Tom during
the speed-date session did not differ between
conditions. Emotion effects could be observed by
the participants, and these effects were similar for a
human controlled avatar and software agent alike.
This is good for the engineer who wants to use these
models for application development, such as the
design of virtual agents or robots. After all, on all
kinds of facets, participants may not experience any
difference between the expression of human
behavior and behavior generated by our model.
4.2 Applications
Our findings can be of great use in many
applications, such as (serious) digital games, virtual
stories, tutor and advice systems, or coach and
therapist systems. For example, Silicon Coppélia
could be used to improve the emotional intelligence
of a ‘virtual crook’ that could be used for police
studies to practice situations in which the police
officers should work on the emotions of the crook,
for example questioning techniques (Hochschild,
1983). Another possible use of models of human
processes is in software and/or hardware that
interacts with a human and tries to understand this
human’s states and processes and responds in an
intelligent manner. Many ambient intelligence
systems (e.g., Aarts et al., 2001) include devices that
monitor elderly persons. In settings where humans
interact intensively with these systems, such as
cuddle bots for dementia patients (e.g., Nakajima et
al, 2001), the system can combine the data gathered
from these devices with Silicon Coppélia to maintain
a model of the emotional state of the user. This can
enable the system to adapt the type of interaction to
the user’s needs.
Silicon Coppélia can also be used to improve
self-help therapy. Adding the moral reasoning
system will be very important for that matter.
Humans with psychological disorders can be
supported through applications available on the
Internet and virtual communities of persons with
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
502

similar problems.
New communication technologies have led to an
impressive increase of self-help programs that are
delivered through the Internet (e.g., Spek et al.,
2007). Several studies concluded that self-help
therapies can be more efficient in reducing mental
health problems, and less expensive than traditional
therapy (e.g., Andrews et al., 2001; Bijl and Ravelli,
2000; Cuijpers, 1997; Spek et al., 2007).
Web-based self-help therapy can be a solution
for people who would otherwise not seek help,
wishing to avoid the stigma of psychiatric referral or
to protect their privacy (Williams, 2001). The
majority of persons with a mental disorder in the
general population do not receive any professional
mental health services (an estimated 65%) (Andrews
et al., 2001; Bijl and Ravelli, 2000). In many
occupations, such as the police force, the fire service
and farming, there is much stigma attached to
receiving psychological treatment, and the
anonymity of Web-based self-help therapy would
help to overcome this. Also many other people feel a
barrier to seek help for their problems through
regular health-care systems; e.g., in a study by Spek
et al. (2007) about internet-based cognitive
behavioral therapy for sub-threshold depression for
people over 50 years old, many participants reported
not seeking help through regular health-care systems
because they were very concerned about being
stigmatized. Patients may be attracted to the idea of
working on their own to deal with their problems,
thereby avoiding the potential embarrassment of
formal psychotherapy (Williams, 2001).
Further, self-help therapy is particularly suited to
remote and rural areas, where ready access to a face-
to-face therapist cannot be economically justified.
Self-help therapy may also be useful in unusual
environments such as oilrigs and prisons, where
face-to-face therapy is not normally available. Self-
help therapy can also be offered to patients while
they are on a waiting list, with the option to receive
face-to-face therapy later, if required (Peck, 2007)
Self-help therapy may be even more successful
when the interface is enhanced or replaced by a
robot therapist that has Silicon Coppélia installed.
The anonymity of robot-supported self-help therapy
could overcome potential embarrassment of
undergoing formal treatment. When regular therapy
puts up too high a threshold, a robot therapist is less
threatening, what the patient reveals is
inconsequential, the patient is in control, and all in
all, interaction with the virtual therapist has a “dear
diary” effect. As if you were speed-dating with a
real partner.
4.3 Future Research
In future research, we will test an extended version
of the current model, using robots in the healthcare
domain. So-called Caredroids will play a chess game
with the patient as a form of daytime activity. Based
on whether the agent reaches its goals (winning and
losing when the agent has ambitions to win or lose),
the likelihood of these goals, and the expectedness
of the move of the user and the outcome of a game,
the emotions joy, distress, hope, fear and surprise are
simulated and shown by the agent by means of
bodily expressions. The Caredroid will be able to
trade rational choices to win the game for affective
choices to let the human opponent win if she is nice
to him.
Additionally, we will integrate Silicon Coppélia
with a moral reasoning system that can solve
medical ethical dilemmas (Pontier and Hoorn,
2012). In this system, actions are evaluated against a
number of moral principles to point out ethical
dilemmas in employing robot care.
In entertainment settings, we often like
characters that are naughty; the good guys often are
quite boring (Konijn and Hoorn, 2005). In Silicon
Coppélia (Hoorn et al., 2012), this could be
implemented by updating the affective decision
making module. Morality would be added to the
other influences that determine the Expected
Satisfaction of an action in the decision making
process. By doing so, human affective decision-
making behavior could be further explored. Some
inital steps in doing this were taken in (Pontier,
Widdershoven and Hoorn, 2012).
ACKNOWLEDGEMENTS
This study is part of the SELEMCA project within
CRISP (grant number: NWO 646.000.003). We
would like to thank Marco Otte for his help in
conducting the experiment. We are grateful to Elly
Konijn for valuable discussions and advice.
REFERENCES
Aarts, E., Harwig, R., and Schuurmans, M., 2001.
Ambient Intelligence. In The Invisible Future: The
Seamless Integration of Technology into Everyday
Life, McGraw-Hill, 2001.
Andrews, G., Henderson, S., & Hall, W., 2001.
Prevalence, comorbidity, disability and service
utilisation. Overview of the Australian National
HowWomenThinkRobotsPerceiveThem-asifRobotswereMen
503

Mental Health Survey. In The British Journal of
Psychiatry, Vol. 178, No. 2, pp. 145-153.
Barrett, L. F., Robin, L., Pietromonaco, P. R., Eyssell, K.
M., 1998. Are Women The "More Emotional Sex?"
Evidence from Emotional Experiences in Social
Context. In Cognition and Emotion, 12, pp. 555-578.
Bijl, R. V., & Ravelli, A., 2000. Psychiatric morbidity,
service use, and need for care in the general
population: results of The Netherlands Mental Health
Survey and Incidence Study. In American Journal of
Public Health, Vol. 90, Iss. 4, pp. 602-607.
Bosse, T., Gratch, J., Hoorn, J. F., Pontier, M. A.,
Siddiqui, G. F., 2010. Comparing Three
Computational Models of Affect. In Proceedings of
the 8th International Conference on Practical
Applications of Agents and Multi-Agent Systems,
PAAMS, pp. 175-184.
Bosse, T., Pontier, M. A., Treur, J., 2007. A Dynamical
System Modelling Approach to Gross´ Model of
Emotion Regulation. In Proceedings of the 8th
International Conference on Cognitive Modeling,
ICCM'07, pp. 187-192, Taylor and Francis.
Brave, S., Nass, C., & Hutchinson, K., 2005. Computers
that care: investigating the effects of orientation of
emotion exhibited by an embodied computer agent.
International Journal of Human-Computer Studies,
62(2), pp. 161–178.
Cuijpers, P., 1997. Bibliotherapy in unipolar depression, a
meta-analysis. In Journal of Behavior Therapy &
Experimental Psychiatry, Vol. 28, No. 2, pp. 139-147
Gross, J. J., 2001. Emotion Regulation in Adulthood:
Timing is Everything. In Current Directions in
Psychological Science, 10(6), pp. 214-219.
Hochschild, A. R., 1983. The managed heart. Berkeley:
University of California Press.
Hoorn, J. F., Pontier, M. A., Siddiqui, G. F., 2008. When
the user is instrumental to robot goals. First try: Agent
uses agent. In Proceedings of International
Conference on Web Intelligence and Intelligent Agent
Technology, WI-IAT ‘08, IEEE/WIC/ACM, Sydney
AU, 296-301.
Hoorn, J. F., Pontier, M. A., & Siddiqui, G. F., 2012.
Coppélius' Concoction: Similarity and
Complementarity Among Three Affect-related Agent
Models. Cognitive Systems Research, 2012, pp. 33-49.
Konijn, E. A., & Hoorn, J. F., 2005. Some like it bad.
Testing a model for perceiving and experiencing
fictional characters. Media Psychology, 7(2), 107-144.
Konijn, E. A., & Van Vugt, H. C., 2008. Emotions in
mediated interpersonal communication. Toward
modeling emotion in virtual agents. In Konijn, E.A.,
Utz, S., Tanis, M., & Barnes, S. B. (Eds.). Mediated
Interpersonal Communication. New York: Taylor &
Francis group/ Routledge.
Landauer, T. K., 1987. Psychology as a mother of
invention. Proceedings of the SIGCHI/GI conference
on Human factors in computing systems and graphics
interface, pp. 333-335.
Marsella, M., Gratch, J., 2009. EMA: A Process Model of
Appraisal Dynamics. In Journal of Cognitive Systems
Research, Vol. 10, No. 1, pp. 70-90.
Nakajima, K., Nakamura, K., Yonemitsu, S., Oikawa, D.,
Ito, A., Higashi, Y., Fujimoto, T., Nambu, A., Tamura,
T., 2001. Animal-shaped toys as therapeutic tools for
patients with severe dementia. Engineering in
Medicine and Biology Society. In Proceedings of the
23rd IEEE Conference, vol. 4, 3796-3798.
Peck, D., 2007. Computer-guided cognitive–behavioral
therapy for anxiety states. Emerging areas in Anxiety,
Vol. 6, No. 4, pp. 166-169.
Picard, R. W., 1997. Affective Computing. Cambridge,
MA: MIT Press.
Pontier, M. A., & Hoorn, J. F., 2012. Toward machines
that behave ethically better than humans do. In
Proceedings of CogSci'12, pp. 2198-2203.
Pontier, M. A., Siddiqui, G. F., 2009. Silicon Coppélia:
Integrating Three Affect-Related Models for
Establishing Richer Agent Interaction. In WI-IAT’09,
International Conference on Intelligent Agent
Technology, vol. 2, pp. 279—284.
Pontier, M. A., Siddiqui, G. F., & Hoorn, J., 2010. Speed-
dating with an Affective Virtual Agent - Developing a
Testbed for Emotion Models In: J. Allbeck et al.
(Eds.), In IVA'10, Lecture Notes in Computer Science,
Vol. 6356, pp. 91-103.
Pontier, M. A., Widdershoven, G. A. M., and Hoorn, J. F.,
2012. Moral Coppélia - Combining Ratio with Affect
in Ethical Reasoning. In: Proceedings of the 13th
Ibero-American Conference on Artificial Intelligence,
IBERAMIA’12, in press.
Smith, C. A., & Lazarus, R. S., 1990. Emotion and
adaptation. In L. A. Pervin (Ed.), Handbook of
personality: Theory & research, (pp. 609-637). NY:
Guilford Press.
Spek, V., Cuijpers, P., Nyklíĉek, I., Riper, H., Keyzer, J.,
& Pop, V., 2007. Internet-based cognitive behavior
therapy for emotion and anxiety disorders: a meta-
analysis. In Psychological Medicine, Vol. 37, pp. 1-10
Turing, A. M., 1950. Computing Machinery and
Intelligence. Mind 54(236), pp. 433-460.
Van Vugt, H. C., Hoorn, J. F., & Konijn, E. A., 2009.
Interactive engagement with embodied agents: An
empirically validated framework. In Computer
Animation and Virtual Worlds, Vol. 20, pp. 195-204
Wallbot, H. G., & Scherer, K. R., 1989. Assessing
Emotion by Questionnaire. Emotion Theory, Research
and Experience, Vol. 4, pp. 55-82.
Williams, C., 2001. Use of Written Cognitive-Behavioral
Therapy Self-Help Materials to treat depression. In
Advances in Psychiatric Treatment, Vol. 7, pp. 233–240.
APPENDIX.
http://camera-vu.nl/matthijs/SpeeddateAppendix.pdf
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
504
