
Robust 3-D Object Skeletonisation for the Similarity Measure
Christian Feinen
1
, David Barnowsky
2
, Dietrich Paulus
2
and Marcin Grzegorzek
1
1
Research Group for Pattern Recognition, University of Siegen, Hoelderlinstr. 3, 57076 Siegen, Germany
2
Research Group for Active Vision, University of Koblenz-Landau, Universitaetsstr. 1, 56070 Koblenz, Germany
Keywords:
3-D Skeleton Extraction, 3-D Curve Skeletons, 3-D Object Retrieval, 3-D Acquisition and Processing, Human
Perception and Cognition.
Abstract:
In this paper we introduce our approach for similarity measure of 3-D objects based on an existing curve
skeletonization technique. This skeletonization algorithm for 3-D objects delivers skeletons thicker than 1
voxel. This makes an efficient distance or similarity measure impossible. To overcome this drawback, we use
a significantly extended skeletonization algorithm (by Reniers) and a modified Dijkstra approach. In addition
to that, we propose features that are directly extracted from the resulting skeletal structures. To evaluate our
system, we created a ground truth of 3-D objects and their similarities estimated by humans. The automatic
similarity results achieved by our system were evaluated against this ground truth in terms of precision and
recall in an object retrieval setup.
1 INTRODUCTION
Automatic similarity measure of objects is important
for many object recognition systems. One of the most
important similarity features considered by humans is
shape (Pizlo, 2008). Powerful and promising shape
descriptors are skeletons. While skeletonization ap-
proaches in 2-D provide satisfying results (Chang,
2007; Bai and Latecki, 2008), their extensions to 3-D
are lacking of robustness and accuracy. Additionally,
3-D skeletons underlie several constraints: (i) Only
cylindrical geometry delivers curve skeletons; cubes
result in so-called surface skeletons. (ii) The skele-
ton extraction process includes complex mathemati-
cal instruments. (iii) Skeletonization methods require
a high computational effort. Additionally, a plenty
of 3-D approaches for skeletonization deliver skele-
tal structures that are wider than one voxel, e.g., (Re-
niers, 2008). However, skeletons are capable to re-
duce the dimensionality of an object while preserving
important shape characteristics in terms of geometry
and topology.
Although, a plethora of research was done in re-
cent decades, the major amount was dedicated to ob-
tain skeletons and only a little in using them in ob-
ject recognition systems. In this paper we try to
close the gap between extraction and use of skele-
tons as a similarity measure. The significant worth of
our work is the constitution of a complete processing
pipeline. Therefore, we employ a skeletonization al-
gorithm proposed by Reniers (Reniers, 2008). Given
the fact that this algorithm does not generate perfect
skeletons, we were forced to extend the Dijkstra al-
gorithm to estimate both, the shortest paths between
skeleton endpoints as well as the location of junction
points within the skeleton. We are aware of the pres-
ence of already existing skeleton extraction methods
that guarantee one voxel wide skeletons, however, Re-
niers’ method produces skeletons with a stable topol-
ogy analogical to the observed object. This prop-
erty has the highest priority for our proposed method,
since we decided to incorporate only topological in-
formation. These features are directly obtained from
the skeletal structure. From a practical point of view,
this decision is reasonable because skeletons are par-
ticularly capable to encode the topological structure
of an object in a highly efficient way. To evaluate our
system, a ground truth of 3-D objects is used whose
similarities are estimated by humans.
Our paper is structured as follows. We start by dis-
cussing relevant existing skeletonization algorithms
for 2-D and 3-D objects (Section 2). Afterwards, Sec-
tion 3 introduces Reniers’ skeletonization method as
well as the improvements made to it within our own
approach. Subsequently, Section 4 describes the pro-
posed similarity measure. In Section 5, we quantita-
tively evaluate our system based on the ground truth
qualified by humans. Finally, Section 6 concludes our
work and grants a deeper look into upcoming future
tasks.
167
Feinen C., Barnowsky D., Paulus D. and Grzegorzek M. (2013).
Robust 3-D Object Skeletonisation for the Similarity Measure.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 167-175
DOI: 10.5220/0004255601670175
Copyright
c
SciTePress

2 RELATED WORK
In the late 1960 Harry Blum introduced an initial
approach for describing objects by skeletons (Blum,
1967) and the well known medial axis (transform) has
been proposed. In subsequent years further methods
have been developed in order to extract skeletons pri-
marily in 2-D. Many of them are mapped into 3-D,
but there are still problems. One of the most popu-
lar methods are Thinning algorithms. This is one of
the most frequently used techniques to generate curve
skeletons of 3-D objects. The idea is to remove iter-
atively the object’s surface (3-D) (or boundary (2-D))
(Pal´agyi and Kuba, 1998; Pal´agyi and Kuba, 1999;
Ma and Sonka, 1996). Voronoi algorithms are also a
popular representative in this domain. The resulting
skeletons are a subset of voronoi edges (Ogniewicz
and Ilg, 1992). Main drawback associated to this type
of algorithms is the high computational complexity.
However, the basic idea was successfully mapped into
3-D space (Ogniewicz and K¨ubler, 1995). 3-D Skele-
tons can also be extracted by the so-called distance
transform methods. We also use this transform in
our system. During the execution of such a method
a distance map is generated that stores the distances
of each location to the closest point on the boundary
or surface (Fabbri et al., 2008; Borgefors, 1996; Re-
niers, 2008). Consequently, all points on the bound-
ary have a zero value. Analogical to the grass fire
flow assumption, this approach implies that skeletal
axes are located at singularities within the distance
map. “Singularities are the points where the field is
non-differentiable. When the distance field is seen
as a height map, the singularities can be seen as the
mountain ridges and peaks” (Reniers, 2008). Other
techniques employ deformable models (Sharf et al.,
2007) or level sets (Hassouna and Farag, 2007) to
approximate the surface of an object in order to es-
timate curve skeletons. Input of these methods are
point clouds or surface meshes. The output is a thin
and connected 3-D curve skeleton that constitutes a
desired structure in many skeleton-based algorithms.
A further approach which is working on the surface
mesh uses a so-called laplacian-based contraction to
contract the mesh iteratively until it convergesagainst
its centerline (Cao et al., 2010). A good introduction
to the most popular methods is given by the authors
K. Siddiqi and S. Pilzer in (Siddiqi and Pizer, 2008).
There is plethora of different approaches related
to object recognition, but most of them are working
in 2-D. Only less are able to perform directly in 3-D
by using skeletons for a similarity measure. More-
over, talking about 3-D skeleton-based retrieval meth-
ods generally includes both, view-based and model-
based approaches. Since the proposed method be-
longs to the latter, only such algorithms are discussed
in the following. In order to retrieve some informa-
tion about view-based approaches, the work presented
in (Macrini et al., 2002) should be mentioned here.
The authors propose a method where the 3-D model
is represented by a collection of 2-D views. These
views are taken for object recognition using shock
graphs. In (Bai and Latecki, 2008) a 2-D Path Simi-
larity Skeleton Graph Matching approach is presented
which is mapped into 3-D by the authors of (Sch¨afer,
2011). Further techniques based on 3-D skeletal rep-
resentations are introduced in (Cornea et al., 2005)
and (Sundar et al., 2003). As in our work, the authors
of (Cornea et al., 2005) are using the distance trans-
form to generate skeletons. However, in contrast to
our approach, they are using the Earth Mover’s Dis-
tance (EMD) to compute a dissimilarity value. More-
over, such an approach is not suitable for our work
due to the fact that our skeletons are wider than one
voxel.
Apart form this, other competing methods in this
area are based on so-called surface skeletons. In
(Hayashi et al., 2011), e.g., a 3-D shape similarity
measurement technique is proposed which uses sur-
face skeletons of voxelized 3-D shapes. This method
is similar to our approach, but the use of surface skele-
tons can be ambiguous in case of objects consisting of
simple geometry parts and this, in turn, affects the ac-
curacy and robustness of the system. In (Zhang et al.,
2005) a further method to perform 3-D object retrieval
by using surface skeletons is presented. In this work,
the authors place the major focus on the representa-
tion of symmetries of 3-D objects, especially in con-
text of articulated 3-D models.
3 SKELETONIZATION
Reniers used a distance transform to skeletonize 3-
D objects in order to perform segmentation purposes
(Reniers, 2008). These skeletons are wider than one
voxel which, in turn, does not affect his segmentation
approach. In our case, this exacerbates an efficient
computation of distinctive skeleton properties. One-
voxel wide skeletons provide attractive computational
advantages to estimate feature points, e.g., skeletal
junction points. However, the objective of our ap-
proach is to be capable to process these non-perfect, n
voxel wide skeletons (with n ∈ N and n > 1) in order
to guarantee stable and accurate topological informa-
tion. Of course, this includes a thinning procedure
somehow, the detection of end- and junction points,
the estimation of so-called nodal areas, the calcula-
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
168
tions of geodesics as well as the computation of fea-
ture values. All these points are subject in the Sec-
tions 3.2 - 3.4, whereas Section 3.1 provides a brief
introduction to Reniers’ work.
3.1 Skeleton Extraction According to
Reniers’ Distance Transform
Reniers’ skeleton extraction method is based on a dis-
tance transform. It consists of three steps, namely
(i) the computation of the so-called Tolerance-based
Feature Transform (TFT), (ii) the computation of the
geodesic paths, and (iii) the actual computation of the
skeleton. For each point p inside the 3-D object, the
TFT calculates feature points lying on the object’s
surface. The feature points are computed based on
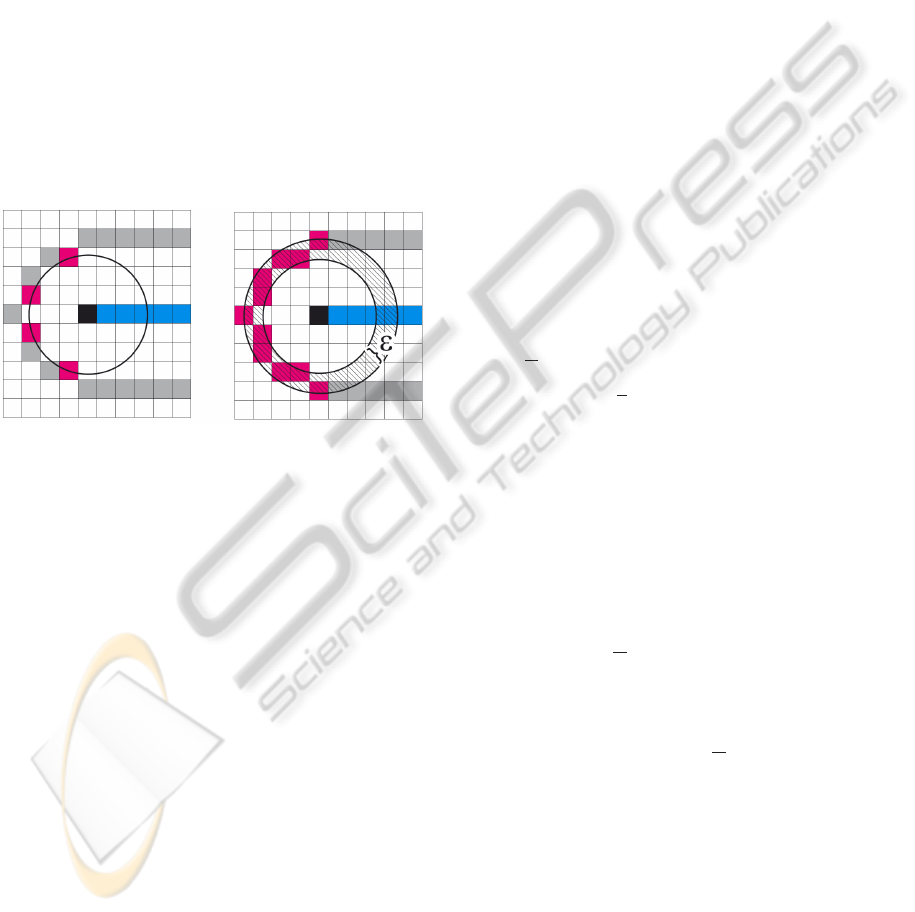
an adjustable tolerance basis as shown in Figure 1.
The TFT was developed in order to handle problems
Figure 1: Working Principle of TFT. The figure shows the
advantage of using an adjustable tolerance basis (ε) in con-
text of a discretized space. From the top-view of an object
it is clearly noticeable that much more feature points are
detectable by using the TFT.
which occur when the input data has a discretized
structure (volumetric data). As shown in Fig. 2(a),
it is not possible to find at least two feature points on
the contour whose lengths are identical to an arbitrary
interior point (black square) inside the rectangle. This
phenomenon is caused by the fact that the number of
voxels is even. In addition to this, it is obvious that
this phenomenon inhibits the estimation of at least
two geodesics between such contour feature points.
Fig. 2(b) shows one of the two possible geodesics
on the contour, please note that the geodesic path to
the opposite side would increase the number of vox-
els by two. These problems are avoidable by adding a
new parameter to adjust a tolerance threshold. Thus,
we are able to find at least two geodesics as shown
in Fig. 2(c). Moreover, the detection of at least two
geodesic paths grants us the possibility to detect so-
called Jordan curves and this, in turn, enables us to lo-
cate the desired skeleton points. The actual estimation
of geodesics between all feature points is performed
by using a Dijkstra algorithm. Unfortunately, this cal-
culation is the most time consuming step within Re-
niers’ algorithm. The computation of the tolerance-
based feature transform is not trivial, please refer (Re-
niers and Telea, 2006) to obtain detailed information
about it. According to the formal definition, a point p
belongs to the skeleton set, if condition (1) is satisfied.
Here, Γ indicates the set of all geodesics between the
feature points. More precisely, a point p is part of the
skeletal structure, if it holds a Jordan curve.
p ∈S ⇔|Γ| ≥ 2 (1)
The concrete estimation of Jordan curves are a bit
more complicated as described here. Please refer (Re-
niers, 2008) for a detail description. The result skele-
ton has several drawbacks related to our purpose: (i)
The skeleton is wider than one-voxel. (ii) Junction
points are not exactly defined due to the use of the
TFT and (iii) the distances between junction and end-
points are not uniquely calculable. The Listing be-
low illustrates the explanations above based on some
pseudo code lines in order to grants a deeper under-
standing of this technique.
1: compute feature transform F on Ω
2: for each object voxel p ∈ Ω do
3: F ←
S
x,y,z∈{0,1}
F(p
x
+ x, p
y
+ y, p
z
+ z)
4: Γ ←
S
a6=b∈F
shortestpath(a,b)
5: if Γ contains a Jordan curve then
6: S ←S∪{~p}
7: else
8: surface skeleton or non-skeleton voxel
9: end if
10: end for
Line 1-3 compute the TFT for each point p inside the
object Ω. Therefore, line 1 processes an ordinary
feature transform and line 3 stores the set of all
feature points F obtained by the TFT according to
the tolerance values (here: x, y,z ∈ {0,1}).
Line 4 computes the set of geodesics Γ. The
geodesic paths are calculated between all features
points which are stored in F.
Line 5-9 investigate the set of geodesics Γ generated
above in order to detect possible Jordan curves.
These curves can be generated by at least two
geodesic paths. If this is the case, the currently
observed point p is moved to the set of skeleton
points (Eq. 2, where S indicates the set of skele-
ton points).
S ← S∪p (2)
Robust3-DObjectSkeletonisationfortheSimilarityMeasure
169
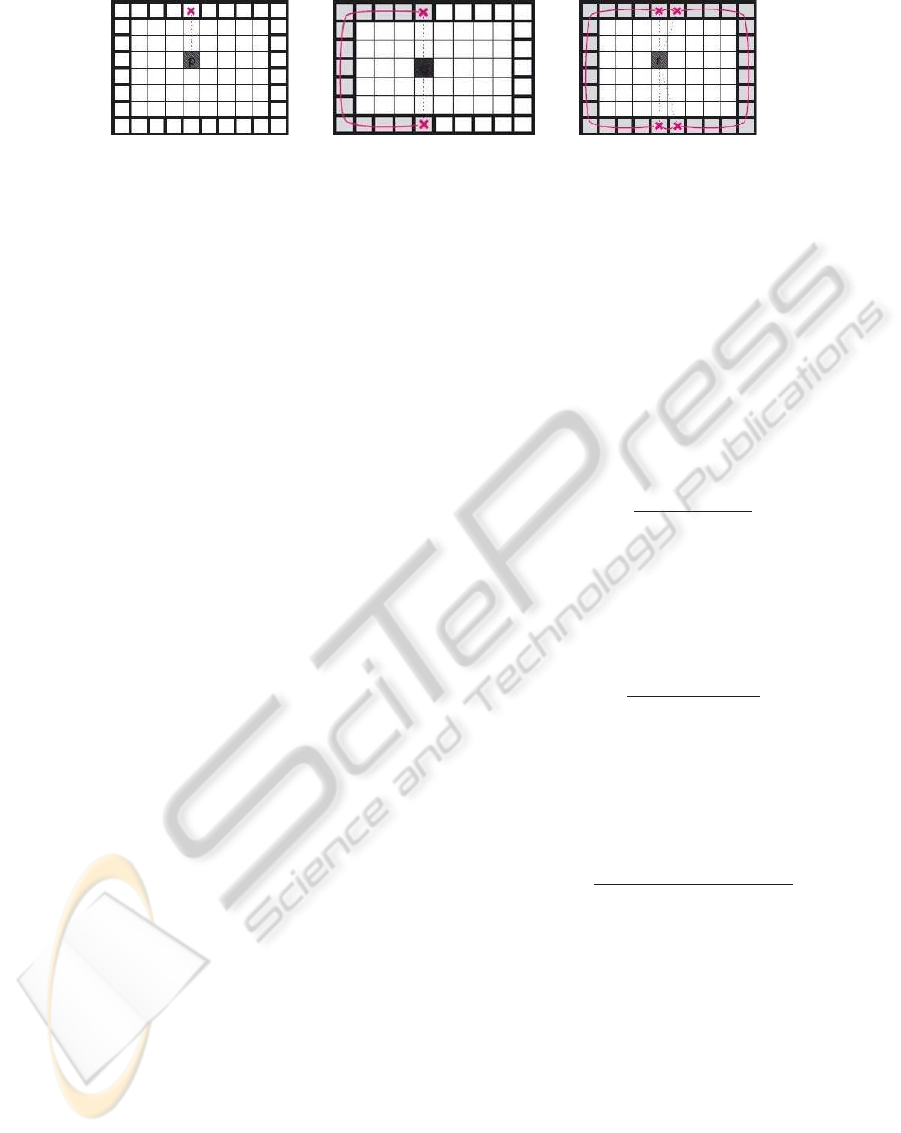
(a) (b) (c)
Figure 2: Problems occurring by using a discretized space. 2(a) shows the problematic to find the center line of the rectangle
due to the even number of interior points. Connected to this problem, 2(b) figures out that the estimation of geodesics is
inhibited as well. 2(c) illustrates the special handling of this problem by using the TFT.
3.2 Skeleton Feature Set
With respect to the problems stated in the previous
section, some modifications of the skeletal structure
are necessary in order to derive an adequate feature
set. These modifications are subject of Sec. 3.3
and 3.4. However, in order to modify the skeletons
generated by the algorithm stated above, considera-
tions about an adequate similarity measure have to
be made initially. This means, the feature set has to
be highly compatible regarding both, discrimination
power and consistency to structure changes. Conse-
quently, this vector strongly correlates to the modifi-
cations of the skeleton structure. Thus, we added the
following three constraints to our deliberations. First,
we only incorporate topological information which
are directly obtainable from the skeletal structure
without considering geometrical information (which
could be derived from the 3-D object as well). Actu-
ally, this aim makes it very challenging to discrimi-
nate our objects. However, it perfectly figures out the
strength of using skeletons to describe articulated ob-
jects. It also demonstrates the robustness of our mod-
ifications made to the skeletons. Second, the features
have to be invariant to rotation, translation and scal-
ing which is an obvious and significant advantage for
comparing objects in 3-D. Third, the computation of
our feature set should be fast in order to speedup the
proposed method. That makes it practical for many
applications.
This section introduces the proposed feature vec-
tor. As already mentioned, the feature set is topologi-
cally oriented and includes five values (Eq. 3).
f
v
= (m
1
,m
2
,m
3
,m
4
,m
5
)
T
(3)
Feature 1 indicates the number (m
1
) of end points
e
0
,e
1
,..., e
n
. This descriptor reflects the complexity
of the object.
Feature 2 is the number (m
2
) of junction points
n
0
,n
1
,..., n
n
. This descriptor extends the complexity
value (Feature 1).
Feature 3 describes the mean number of outgoing
paths of a junction point. This can be regarded as
a distribution factor between all end- and junction
points. The higher the value the more endpoints con-
nect to the same junction point on average. The func-
tion c(n
i
,e
j
) is a binary function. It returns the value
one, if there is a connection between the endpoint e
j
and the junction point n.
m
3
=
m
2
∑
i=1
m
1
∑
j=1
c(n
i
,e
j
)
m
2
(4)
Feature 4 determines the mean distance of all
skeletal paths (between endpoints). This value en-
codes the lengths of all object segments to one value.
m
4
=
m
1
∑
i=1
m
1
∑
j=i+1
d(e
i
,e
j
)
m
1
/2∗(m
1
−1)
(5)
Feature 5 represents the variance of all shortest
path lengths. This value indicates the regularity of
lengths inside the different object parts.
m
5
=
m
1
∑
i=1
m
1
∑
j=i+1
(d(e
i
,e
j
) −m
4
)
2
m
1
/2∗(m
1
−1)
(6)
3.3 Preprocessing
In order to obtain a feature vector as introduced in
Sec. 3.2 minimal demands on end- and junction
points have to be satisfied. These requirements con-
cern both, outlier removal and consistency of the
skeleton structure. This became obvious during our
work, as we observed some instability caused by out-
liers as well as by problems regarding the skeleton
structure (stated in Sec. 3.1). Hence, one major point
is the modification of Reniers’ skeletons with respect
to the skeletal structure. This issue is debated in Sec.
3.4. In this section we briefly discuss the outlier re-
moval which constitutes only a small part within our
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
170

Figure 3: The figure shows a skeleton after the preprocess-
ing step. The preprocessing is based on morphological op-
erations. In this case a 3 ×3×3 cube is used to perform a
dilatation followed by an erosion.
whole processing pipeline. Therefore, we employ
well-known state-of-the-art methods form the image
processing domain, e.g., thinning and morphological
operators. Since the skeleton extraction method is
time consuming, we tried to employ computationally
attractive techniques to speedup the whole process-
ing pipeline. tasks. In order to evaluate each method,
we directly visualized their results with OpenGL. This
was not much effort due to the fact our the dataset
is easily manageable. Thereby, we observed that the
best results are achieved with morphological opera-
tors even we are running the risk that they do not com-
pulsorily preserve the skeleton’s topology structure.
In our case a dilatation followed by an erosion is per-
formed. For both operations, we use a structure ele-
ment (cube) of size 3×3×3. The topological changes
caused by this combination of structure and structure
element are not able to influence our method nega-
tively. They also outperformed thinning algorithms.
In this way 60% to 70% of all wrong voxels could be
eliminated on average. The remaining 30% are un-
critical since our algorithm is able to handle such an
amount of outliers. Figure 3 shows a skeletons after
the preprocessing step.
3.4 Modified Version of the Dijkstra
Algorithm
This section describes our final approach. As stated
above, there are still outlier voxels. They do not
affect the proposed method negatively since our al-
gorithm will remove them as well during its execu-
tion. In addition to this, it detects the skeleton junc-
tion points and computes the values of our feature
vector. Therefore, we propose the Dijkstra-Skeleton
algorithm (DSA) as a modified version of the well-
known Dijkstra algorithm. Since the DSA consists
of multiple steps, we will provide an overview about
its operating principle below. Summarized, we bene-
fit from two significant advantages by using this new
version. First, we are able to compute our feature
vector. Second, as already stated, we get rid of the
remaining wrong endpoints.
1. The skeleton structure is mapped to a continuous
graph. This means all voxels are transformed into
an adjacency matrix. This matrix stores the dis-
tances between these nodes.
2. Expansion of skeleton nodes to skeleton nodal ar-
eas (SNA). SNAs are sets of points adjacent to
skeleton junction points which are thicker than
one voxel inside the skeleton. They are necessary
to prevent miscalculations of shortest paths. This
can happen, if the original skeleton junction point
is wider than one voxel. In this case the junction
point runs the risk of being skipped and this, in
turn, would lead to a wrong result. This is highly
crucial because the first SNA has to be assigned to
each shortest path that is touched by it. In order to
guarantee this assignment all SNAs have to be de-
tected. Therefore, we utilize a 3×3×3 structure
element.
3. Computation of all shortest paths and storage of
the first SNA that is passed during the computa-
tion.
4. Validity check of Dijkstra paths based on two ex-
clusion criteria.
• An endpoint is located between two SNAs.
• Multiple endpoints are connected to the same
SNA and the length of the currently observed
endpoint is not the maximum.
Fig. 4 demonstrates both cases. According to our
exclusion criteria, endpoint e
2
and e
3
is removed
from the graph.
5. Computation, normalization and storage of all re-
maining values of our feature vector introduced in
Sec. 3.2.
Figure 4: Conceptual representation of a skeleton graph.
The black arrows e
1
,e
2
,.. ., e
5
indicate the skeleton end-
points and the yellow rectangles SNA1 and SNA2 are skele-
ton nodal areas. By executing the modified Dijkstra algo-
rithm the endpoints e
2
and e
3
are removed.
4 SIMILARITY MEASURE
This section briefly describes the selected similarity
measure that is used to compare two 3-D objects. In
Robust3-DObjectSkeletonisationfortheSimilarityMeasure
171
this work, we employ the well-known cosine angle
as defined in (7). Since we are able to arrange our
features in a vector, this similarity measure, or more
precisely the distance, is highly suitable for our pur-
poses. A further benefit is its normalization power
regarding the vector lengths. In order compare two
objects based on their skeletons, we compute the dis-
tance between their feature vectors.
sim
cos
(f
n
,f
m
) =
hf
n
,f
m
i
kf
n
k∗kf
m
k
(7)
In addition to this, we rate the quality of a query
with well-known indicators from the field of informa-
tion retrieval, namely recall (completeness) and pre-
cision (accurateness). An small example is shown in
Table 2. In order to be capable to compute these val-
ues, a ground truth (GT) has been generated.
4.1 Ground Truth
The GT consists of totally 14 objects. We know that
this amount of objects is much to less in order to per-
form a comprehensive evaluation. Although there are
some standardized databases consisting of more ob-
jects, they are not useful for our project in this first it-
eration. The reason for this is the fact that we want to
investigate relations to the human perception. There-
fore, we used a group of volunteers (consisting of
15 students from different research disciplines) and
asked them to rate the the similarity of each object
pair within our database. Even for a small database
like ours, the similarity of 91 object pairs has to be
rated by a single person. If we would split up this
work, we will run the risk to jeopardize the GT’s con-
sistency. This, in turn, would be dramatically, be-
cause the GT a crucial factor to determine the num-
ber of true positives for every query. That means, the
GT provides the basis to compute the so-called opti-
mal hitting set. Unfortunately, the number of possible
(true) hits is not constant in our case caused by the
way of determining similarity groups. Summarized
we were faced with several problems: First, the ob-
jects belonging to each class are not spread uniformly.
Second, test persons were responsible to cluster our
objects into “similarity groups” according to the hu-
man understanding of similarity. On the one hand,
this data provides a high degree of interesting infor-
mation which is discussed in Sec. 5. On the other
hand, we had to ensure that we do not overload our
volunteers with to many rating tasks. Third, the op-
timal hitting set was estimated by a heuristic as ex-
plained as follows:
1. For each object O
h
all remaining GT objects are
arranged in a descending order within a list ac-
cording to their corresponding GT similarity val-
ues (s(O
h
)).
2. Afterwards, we compute all differencesof similar-
ity values as shown in Eq. 8 where d
O
v
indicates
the similarity value of an object according to its
list position (v).
∆(d
O
v
,d
O
v+1
) (8)
3. Finally, we detect the position of the fourth largest
delta value (∆) and select all objects above this
row as part of the optimal hitting set (H
G
).
An example of the procedure is shown in Table 1.
The decision to use the fourth largest difference as a
threshold is based on empirical observations. Besides
this, the actual rating of similarities, which has been
performed by our volunteers, was unrestricted. Every
test person was free to choose continuously different
perspectives on the objects in order to rate their simi-
larity.
Table 1: Example execution of the proposed heuristic to
select whose objects that build an optimal hitting set H
G
for
an arbitrary query object O
h
.
list s(O
h
) ∆(d
O
v
,d
O
v+1
) ∆-Position O
v
∈ H
G
O
i
0.9 - -
√
O
j
0.65 0.25 1
√
O
k
0.64 0.01 7
√
O
l
0.45 0.2 3
√
O
m
0.3 0.15 4 x
O
n
0.06 0.24 2 x
O
o
0.02 0.04 5 x
O
p
0.0 0.02 6 x
5 EVALUATION
This section presents the results of the evaluation
based on the proposed method. The objects of our
data set are shown in Fig. 5. Unfortunately, our
database is limited to 14 objects. Nevertheless, these
objects are quite challenging and our results are quite
promising.
As already mentioned in Sec. 4.1, the GT sim-
ilarity information was given by human volunteers.
Admittedly, one of the human characteristics is the
skill to decide similarity on fuzzy degrees and thus
the human perception is not binary. However, our
tests discovered two major things. (i) Expressing this
vagueness in numbers constitutes a challenging job
for humans and this (ii) makes it even harder to ar-
range these values subsequently in a consistent and
uniform distributed way. Latter is also affected by the
circumstance that each person scales this fuzziness
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
172
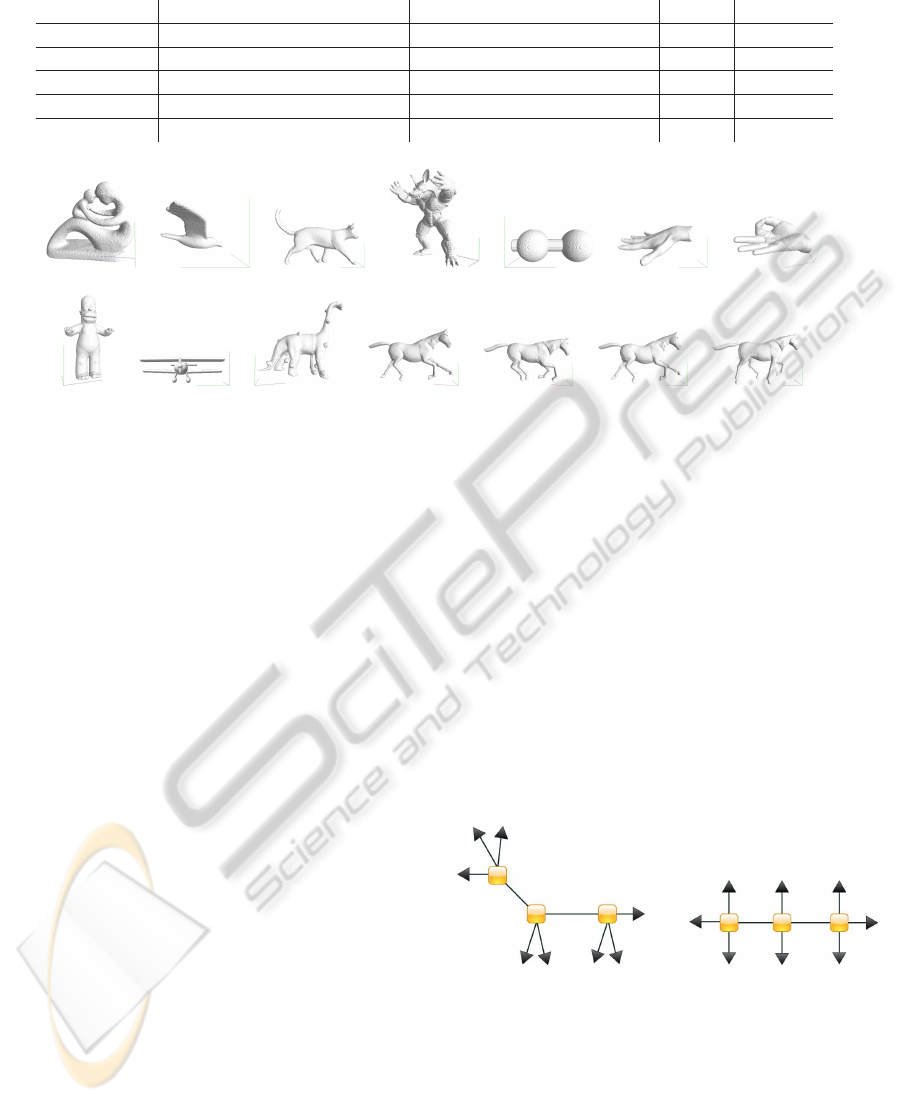
Table 2: Some easy example calculations in terms of Recall and Precision. All content elements are fictitious.
query object optimal #hits (GT) actual #hits (SM) Recall Precision
O
a
O
x
, O
y
, O
z
O
x
, O
y
, O
z
1 1
O
b
O
i
, O
j
, O
k
, O
l
O
c
, O
d
0 0
O
c
O
i
, O
j
, O
k
, O
l
O
i
, O
j
0.5 1
O
d
O
i
, O
j
O
i
, O
j
, O
k
, O
l
1 0.5
O
e
O
i
, O
j
, O
k
, O
l
O
i
, O
j
, O
m
, O
n
0.5 0.5
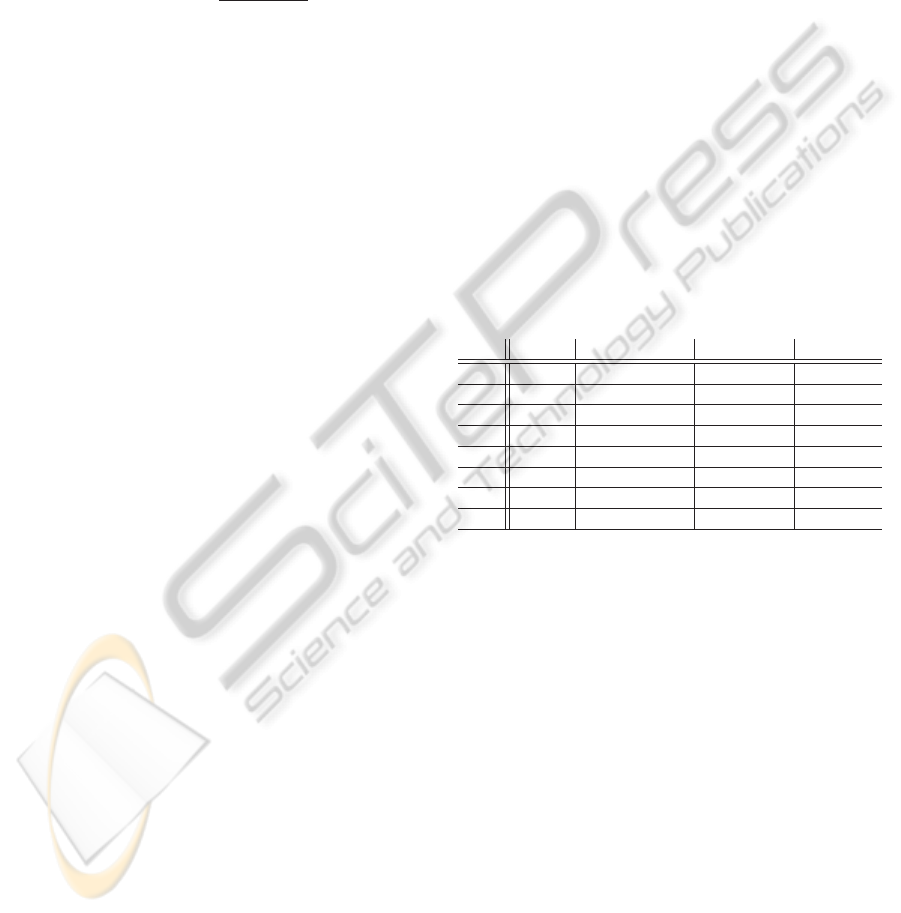
(a) o1 (b) o2 (c) o3 (d) o4 (e) o5 (f) o6 (g) o7
(h) o8 (i) o9 (j) o10 (k) o11 (l) o12 (m) o13 (n) o14
Figure 5: Overview about our object database consisting of 14 objects. As shown, most of the objects are articulating.
Articulated objects are highly suitable to work with skeletons.
totally different. In order to handle this gap of per-
ception and capability to express vagueness in values,
we limited this information to two categories: similar
and not similar. Consequently, we lost the possibil-
ity to employ a rational differentiation between these
two quantities. As a result of this, we were forced to
compare between two different scales:
1. an ordinal scaled range obtained by humans and
2. a continuous and metric interval-scaled range de-
rived from our similarity measure.
Working with different scales is hard and excludes a
direct comparison of both values. Thus, the whole
evaluation has to be expressed in terms of similar or
not similar. Additionally, we have to consider a very
interesting and crucial phenomena which we call “un-
conscious background-knowledge”. This means, hu-
mans refer to unconscious relationships between ob-
jects during the similarity rating. For example, it is
not surprising that the object group consisting of Fig.
5(o11) to Fig. 5(o14) obtains a high similarity value.
But in case of the objects of Fig.5(o5), 5(o6) and
5(o7) it is a bit surprising. However, with the knowl-
edge in mind it is replicable. Unconscious knowledge
guides persons to form factual connections. Consid-
ering this information, we evaluated our method. As
already stated, we evaluated the results in terms of re-
call (R) and precision (P). The evaluation results are
shown in Table 4. Altogether, most of the results are
quite promising and it can been assumed that our sys-
tems rates similarity of 3-D objects according to a cer-
tain degree of human perception. Nevertheless, it has
to be remarked that the object group of horses leads to
several outliers and that its result is not as accurate as
expected. Although all horses are found by our algo-
rithm, there are multiple wrong classified objects. The
problem is associated with the decisions we made in
respect of the proposed feature vector. Since we de-
cided to consider only the topological information of
the objects, the feature vector is not able to discrimi-
nate different objects with similar topology in an ad-
equate way (Fig. 6). A further aspect in context of
our feature vector relates to feature 3. This feature
does not provide strong differences within the range
of its values and consequently there is no additional
information.
(a) Horse (b) Three-man kayak
Figure 6: Two synthetically generated skeletons. The first
one could be the skeleton of a horse, the second could be
a three-man kayak. As it is shown, the skeletons are ap-
parently different, but in the case that only their topological
structure is considered, the skeletons are not differentiable
any more.
Robust3-DObjectSkeletonisationfortheSimilarityMeasure
173
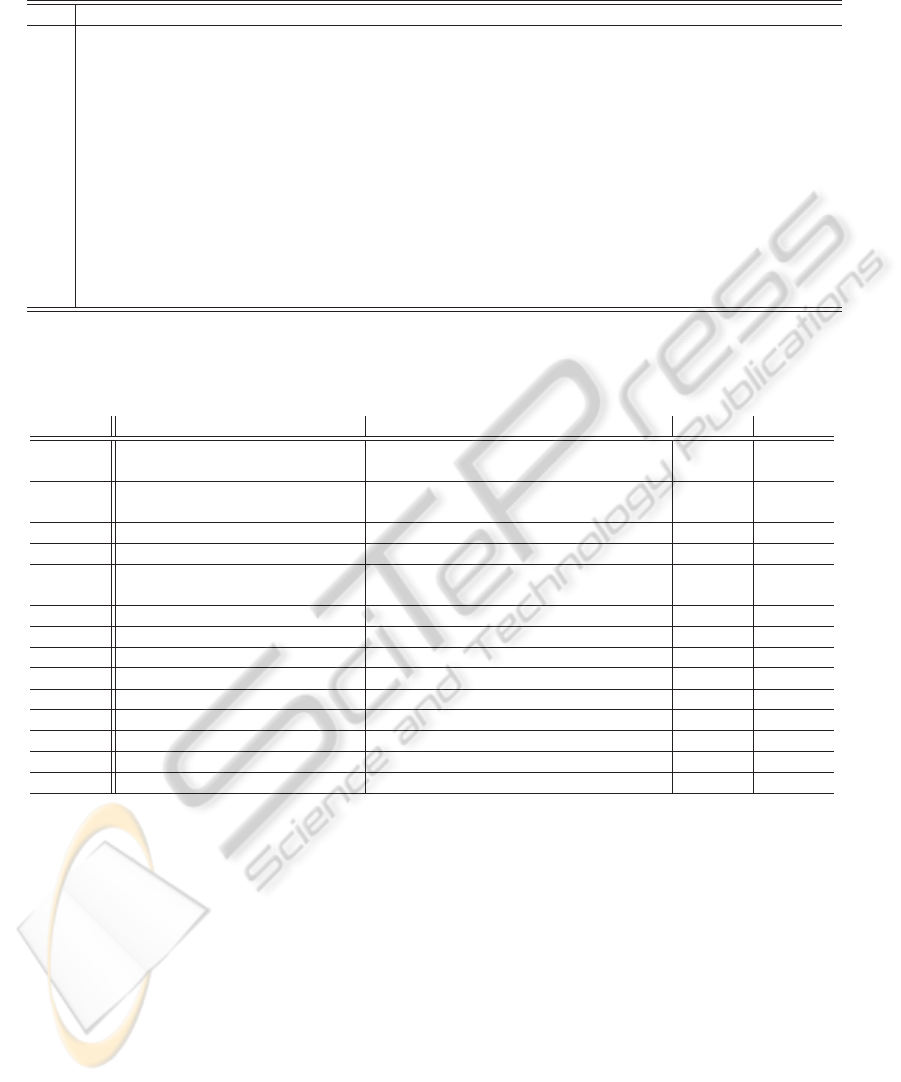
Table 3: Overview about the human similarity values between each combination of objects. To simplify the interpretation we
encoded object pairs with a highly rated similarity red and object pairs with low similarity blue.
o
1
o
2
o
3
o
4
o
5
o
6
o
7
o
8
o
9
o
10
o
11
o
12
o
13
o
14
o
1
-
o
2
0,10 -
o
3
0,12 0,20 -
o
4
0,20 0,07 0,27 -
o
5
0,12 0,20 0,13 0,05 -
o
6
0,13 0,12 0,15 0,13 0,17 -
o
7
0,13 0,11 0,12 0,10 0,17 0,90 -
o
8
0,19 0,07 0,40 0,47 0,10 0,20 0,13 -
o
9
0,08 0,46 0,07 0,07 0,09 0,07 0,10 0,06 -
o
10
0,22 0,07 0,38 0,30 0,07 0,10 0,17 0,17 0,07 -
o
11
0,13 0,10 0,61 0,23 0,07 0,07 0,10 0,19 0,07 0,60 -
o
12
0,13 0,10 0,60 0,23 0,10 0,07 0,10 0,19 0,07 0,59 0,95 -
o
13
0,12 0,10 0,63 0,23 0,10 0,07 0,10 0,19 0,07 0,59 0,95 0,92 -
o
14
0,13 0,10 0,60 0,23 0,10 0,07 0,10 0,19 0,07 0,61 0,96 0,96 0,95 -
Table 4: On the left you can see the query object which corresponds to Fig. 5. In the second and third column both set of
objects are arranged, the objects which are classified as similar by our test persons and the objects retrieved by our similarity
measure. The last to columns show the corresponding Recall and Precision value.
query optimal hitting set (GT) actual hitting set (similarity measure) Recall Precision
O
1
O
2
, O
3
, O
4
, O
5
, O
6
, O
8
, O
10
,
O
11
, O
12
, O
13
, O
14
O
3
, O
4
, O
8
, O
9
, O
10
, O
11
, O
12
, O
13
,
O
14
0.73 0.89
O
2
O
3
, O
5
, O
6
, O
7
, O
9
O
1
, O
3
, O
4
, O
5
, O
6
, O
7
, O
9
, O
10
, O
11
,
O
12
, O
13
, O
14
1.00 0.42
O
3
O
11
, O
13
O
7
, O
9
, O
11
0.50 0.33
O
4
O
1
, O
3
, O
8
, O
10
, O
11
O
1
, O
8
, O
9
, O
10
, O
11
, O
12
, O
13
, O
14
0.80 0.50
O
5
O
6
, O
7
O
1
, O
2
, O
3
, O
4
, O
7
, O
8
, O
9
, O
10
, O
11
,
O
12
, O
13
, O
14
0.50 0.08
O
6
O
1
, O
2
, O
3
, O
5
, O
7
, O
8
, O
10
O
3
, O
7
, O
11
0.29 0.67
O
7
O
1
, O
2
, O
5
, O
6
, O
8
, O
9
, O
10
O
3
, O
6
0.14 0.50
O
8
O
1
, O
3
, O
4
, O
6
, O
10
, O
11
O
1
, O
4
, O
9
, O
10
, O
11
, O
12
, O
13
, O
14
0.67 0.50
O
9
O
2
, O
5
, O
7
, O
8
, O
11
O
1
, O
4
, O
8
, O
10
, O
11
, O
12
, O
13
, O
14
0.40 0.25
O
10
O
11
O
1
, O
4
, O
8
, O
9
, O
11
, O
12
, O
13
, O
14
1.00 0.13
O
11
O
13
O
1
, O
3
, O
4
, O
9
, O
11
, O
12
, O
13
, O
14
1.00 0.13
O
12
O
14
O
1
, O
4
, O
8
, O
9
, O
10
, O
11
, O
13
, O
14
1.00 0.13
O
13
O
11
O
1
, O
4
, O
8
, O
9
, O
10
, O
11
, O
12
, O
14
1.00 0.13
O
14
O
12
O
1
, O
3
, O
4
, O
8
, O
9
, O
1
0, O
11
, O
12
, O
13
1.00 0.11
6 CONCLUSIONS
In this paper we introduce an innovative approach
for 3-D object retrieval based on 3-D curve skele-
tons. Therefore, we employ an already existing skele-
ton extraction technique with several drawbacks in re-
spect to our project. To overcome the most signifi-
cant problems of the resulting 3-D skeletons (e.g., a
curve thickness of more than one voxel), we propose
a modified version of the Dijkstra algorithm. Ad-
ditionally, we present a new feature set. This fea-
ture set only considers the topological structure of the
skeleton which makes it quite challenging to discrim-
inate objects. We decide to ignore the geometrical
information in order to prove the robustness of skele-
tons. The feature vector, in turn, is combined with
a suitable similarity measure, the cosine angle, that
enables us to evaluate our method. In addition to
this, we generate a ground truth database consisting
of 3-D objects. This database is clustered to “similar-
ity groups” by volunteers. Given these information,
we perform a challenging evaluation showing quite
promising results that justify our research. The evalu-
ation values are expressed in well-known terms from
the field of information retrieval. In the future, we
will compare our algorithm to other state-of-the-art
techniques. In this context we are going to use a new
medical 3-D object datasets as well as more compre-
hensive and standardized databases as the McGill 3-D
Shape Benchmark, Princeton Shape Benchmark and
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
174

objects from the AIM@Shape database. As a result of
this, our method is directly comparable to other meth-
ods. Moreover, since the medical 3-D object database
is already evaluated based on skeletons by using their
geometrical features, we are able to compare these re-
sults against whose of our method. Finally, we are go-
ing to combine both, the topological and geometrical
information. Related to this, we will extend our refer-
ence set (GT) as well and we are going to investigate
other possibilities of 3-D object representation. Fur-
ther research plans consider also other skeletonization
algorithms, features and feature sets as well as other
input data structures (e.g. point clouds, meshes). The
latter point is quite interesting considering the steadily
increasing amount of, e.g., Kinect devices and the
number of research based on such a device. Besides
this, we plan to improve all of our tests in terms of
invariance power and noise sensitivity.
ACKNOWLEDGEMENTS
This work was funded by the German Research Foun-
dation (DFG) as part of the Research Training Group
GRK 1564 “Imaging New Modalities”.
REFERENCES
Bai, X. and Latecki, L. (2008). Path similarity skeleton
graph matching. Pattern Analysis and Machine Intel-
ligence, IEEE Transactions on, 30(7):1282–1292.
Blum, H. (1967). A transformation for extracting new de-
scriptors of shape. In Wathen-Dunn, W., editor, Mod-
els for the Perception of Speech and Visual Form,
pages 362–380. MIT Press, Cambridge.
Borgefors, G. (1996). On digital distance transforms in
three dimensions. Computer Vision and Image Un-
derstanding, 64(3):368 – 376.
Cao, J., Tagliasacchi, A., Olson, M., Zhang, H., and Su, Z.
(2010). Point cloud skeletons via laplacian based con-
traction. In Shape Modeling International Conference
(SMI), 2010, pages 187–197.
Chang, S. (2007). Extracting skeletons from distance map.
International Journal of Computer Science and Net-
work Security, 7(7):213–219.
Cornea, N., Demirci, M., Silver, D., Shokoufandeh, Dick-
inson, S., and Kantor, P. (2005). 3d object retrieval
using many-to-many matching of curve skeletons. In
Shape Modeling and Applications, 2005 International
Conference, pages 366–371.
Fabbri, R., Costa, L. D. F., Torelli, J. C., and Bruno, O. M.
(2008). 2d euclidean distance transform algorithms: A
comparative survey. ACM Comput. Surv., 40(1):1–44.
Hassouna, M. and Farag, A. (2007). On the extraction of
curve skeletons using gradient vector flow. In Com-
puter Vision, 2007. ICCV 2007. IEEE 11th Interna-
tional Conference on, pages 1–8.
Hayashi, T., Raynal, B., Nozick, V., and Saito, H. (2011).
Skeleton features distribution for 3d object retrieval.
In proc. of the 12th IAPR Machine Vision and Appli-
cations (MVA2011), pages 377–380, Nara, Japan.
Ma, C. M. and Sonka, M. (1996). A fully parallel 3d thin-
ning algorithm and its applications. Comput. Vis. Im-
age Underst., 64(3):420–433.
Macrini, D., Shokoufandeh, A., Dickinson, S., Siddiqi, K.,
and Zucker, S. (2002). View-based 3-d object recog-
nition using shock graphs. In Proceedings of the 16
th International Conference on Pattern Recognition
(ICPR’02) Volume 3 - Volume 3, ICPR ’02, pages 24–
28, Washington, DC, USA. IEEE Computer Society.
Ogniewicz, R. and Ilg, M. (1992). Voronoi skeletons: the-
ory and applications. In Computer Vision and Pat-
tern Recognition, 1992. Proceedings CVPR ’92., 1992
IEEE Computer Society Conference on, pages 63–69.
Ogniewicz, R. L. and K¨ubler, O. (1995). Hierarchic voronoi
skeletons. Pattern Recognition, Vol. 28, pages 343–
359.
Pal´agyi, K. and Kuba, A. (1998). A 3d 6-subiteration thin-
ning algorithm for extracting medial lines. Pattern
Recognition Letters 19, pages 613–627.
Pal´agyi, K. and Kuba, A. (1999). Directional 3d thinning
using 8 subiterations. In Proceedings of the 8th Inter-
national Conference on Discrete Geometry for Com-
puter Imagery, DCGI ’99, pages 325–336, London,
UK, UK. Springer-Verlag.
Pizlo, Z. (2008). 3D Shape: Its Unique Place in Visual Per-
ception. The MIT Press, Cambridge - Massachusetts,
London - England.
Reniers, D. (2008). Skeletonization and Segmentation of
Binary Voxel Shapes. PhD thesis, Technische Univer-
siteit Eindhoven.
Reniers, D. and Telea, A. (2006). Quantitative compari-
son of tolerance-based feature transforms. First Inter-
national Conference on Computer Vision Theory and
Applications (VISAPP), pages 107–114.
Sch¨afer, S. (2011). Path similarity skeleton graph matching
for 3d objects. Master’s thesis, Universit¨at Koblenz-
Landau.
Sharf, A., Lewiner, T., Shamir, A., and Kobbelt, L.
(2007). On-the-fly Curve-skeleton Computation for
3D Shapes. Computer Graphics Forum, 26(3):323–
328.
Siddiqi, K. and Pizer, S. (2008). Medial Representations:
Mathematics, Algorithms and Applications. Springer
Publishing Company, Incorporated, 1st edition.
Sundar, H., Silver, D., Gagvani, N., and Dickinson, S.
(2003). Skeleton based shape matching and retrieval.
In Shape Modeling International, 2003, pages 130–
139.
Zhang, J., Siddiqi, K., Macrini, D., Shokoufandeh, A.,
and Dickinson, S. (2005). Retrieving articulated 3-
d models using medial surfaces and their graph spec-
tra. In Proceedings of the 5th international conference
on Energy Minimization Methods in Computer Vision
and Pattern Recognition, EMMCVPR’05, pages 285–
300, Berlin, Heidelberg. Springer-Verlag.
Robust3-DObjectSkeletonisationfortheSimilarityMeasure
175
