
Through a Fuzzy CTL Logic for Modelling Urban Trajectories
A Framework for Modelling City Evolution from Past to Future
Asma Zoghlami
1
, Cyril de Runz
1,2
and Herman Akdag
1
1
LIASD, University of Paris 8, 2 Rue de la liberté, 93526, Saint-Denis Cedex, France
2
CReSTIC, University of Reims, Rue des crayères, BP 1035, 51687 Reims cedex 2, France
Keywords: Geographical Information System, Spatiotemporal Modelling, Evolving System, City, Modal Temporal
Logic.
Abstract: A city is by definition a relatively large town of a significant importance. It is a centre of population,
commerce, culture, industry, etc. The city evolves over time and gets morphological, sociological, economic
and political transformations. Geographic Information System (GIS) may be used in spatial analysis of both
the current city and its evolution over time. Based on the past and the present of a city, we are interested in
developing a methodology that goes from the spatiotemporal modelling of its evolution to its prediction in
the future. The motivation behind this research is to create a tool for the decision support at the disposal of
the town hall. This tool aims to help making future decisions about investments, transport networks,
infrastructures, etc. In this paper, we propose a framework that allows defining the possible trajectories of
the city following the spatial, temporal and functional dimensions. The definition of those trajectories will
be attached to a reasoning based on logic according to modalities, time and the imperfect nature of the
information (imprecision, uncertainty, etc.).
1 INTRODUCTION
Geographical Information System (GIS) could be
viewed as a set of tools that allow gathering,
handling, analysing and displaying the data from
various sources (Burrough and McDonnell, 1998).
These data are localized information that contributes
to the space management. Spatial information is
mainly used according to specific objectives. GIS
has an important role in many fields, including
history and urban planning, which involves them in
all phases of data processing starting from the data
collection and ending with the visualization of the
built maps. Historians and geographers may study
the history of cities using GIS for analysing them
over long periods of time. In the urban planning
field, GIS tools enhance urban planners’ analytical,
problem-solving and decision making capabilities.
Urban planning is a future-oriented activity
mainly conditioned by the past and the present.
Therefore, a natural way for modeling the city
evolution is to exploit a logical framework based on
the past of the city that allows modeling rules
according to temporal links using modalities.
Indeed, modal logic and/or temporal logic may help
us for defining consistent processes over time. For
instance, as in the previous example, the emergence
of means of transport (roads, railways) has
contributed very closely to the economic and urban
development (construction, extensions of existing
production sites) and to the sociological
development (populating area, immigration).
To understand past, present and future of the
city, it is important to identify the space in which its
trajectory can be modeled. It is therefore, essential to
establish a list of identified variables as a part of a
city model and to generate a Cartesian logic in the
interaction of these variables in space and time.
Modalities and temporalities will give us the tools to
define this trajectory.
In classic approaches, the imprecision of the
stored information is not considered for modeling
the urban trajectories. In deed, if the uncertainty of
the scenario is studied for the prospective approach
using probabilities, the modelling of the urban
trajectories according to the vagueness of the initial
data is still few studied.
In this paper, section 2 presents the nature of the
studied object and of their possible evolution.
Section 3 introduces the logics we would use.
514
Zoghlami A., de Runz C. and Akdag H..
Through a Fuzzy CTL Logic for Modelling Urban Trajectories - A Framework for Modelling City Evolution from Past to Future.
DOI: 10.5220/0004256305140518
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 514-518
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
Section 4 proposes our framework. Section 5 is
devoted a discussion and the conclusion.
2 URBAN TRAJECTORIES:
OBJECTS AND EVOLUTIONS
Many researches focused on the modeling of the old
cities' history. In particular, several studies targeted
the development of a modeling approach to
represent cities' shapes and their dynamic in the past
time (Güting et al., 2000); (Pumain et al., 2006).
Urban objects are generally represented as the
combination of three features (Peuquet, 2002):
- The function of the object (church, school,
business, etc.),
- The space which is the location of the object,
- The time that corresponds to the existence of the
object over time.
Thus, the trajectory of urban objects is determined
by the different changes occurred in each one of the
previous features. Over the time, the object can
evolve by changing its function, its space or the both
at once. In fact, it may only change its function and
keep its space, change its space and keep its function
or change both the space and the function at once.
It is completely obvious to say that the future of
a city (urban area) is uncertain, and any scenario
should be considered as it is. Nevertheless, we can
study the different possible evolution according to
the knowledge of the past and to the current rules for
the change.
This knowledge is usually vague or imprecise. In
fact, there are many possible sources of information:
such as history studies, maps, city archives, current
urban management laws and directives, etc. Then,
consider the past time to retrace the shape of urban
objects (city, agglomerations, urban areas, etc.)
motivate as to wonder about the geographical
dimensions, and the different changes that the city
would have by evolving in the future.
Nevertheless, every stored data is subject to
imprecision to each component of the information.
Therefore, this component of the information should
be taken into consideration. That is the main goal of
our proposal. In order to present it, we should,
firstly, introduce the different logics we will use.
3 LOGICS
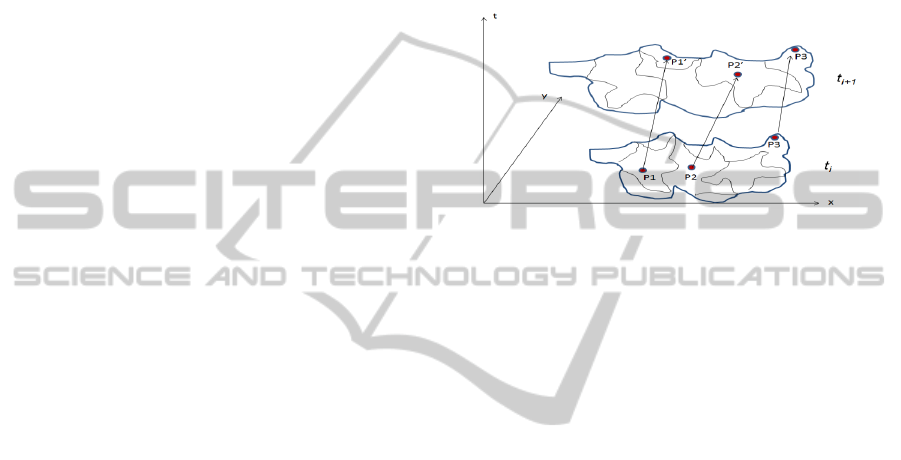
Based on the past and the present of a city, we are
interested in modelling its evolution in the future. To
reach this objective, we have to define its
spatiotemporal trajectory at an instant ti+1. In Figure
2, the city evolves in the space (x, y) during the
period [ti, ti+1]: the points P1’, P2’ and P3’ at ti+1
correspond to the evolution of respectively the
points P1, P2 and P3 observed at the time ti. These
future points are created based on expressions like
“we think that P1 and P1’ should always be
matched”, “it seems that P2 will be P2’ ”, “we know
that P3 will always be P3”, etc.
Figure 1: Illustration of two steps of a possible urban
trajectory.
The elaboration of this trajectory requires the use of
a logic offering ways to reason about expressions
qualified in terms of time called also time modalities
such as “it has been the case that p”, “it has always
been the case that p”, “it will always be the case that
p”, etc.
3.1 Temporal Logic
Classical logic has a static nature that does not allow
handling the concept of properties changing over
time. Temporal logics are consequently, obtained by
extending classical logics with temporal operators
like always, all, some, until and next to express the
evolution of a system over time.
They associate a truth value to a sequence of
states representing the evolution of a system. The
concept of truth in the temporal logic depends on the
world evolution. It means that a proposition may be
false at some time and becomes later true. This
concept may be used to represent the acquired
knowledge. These logics are defined on a set P of
atomic propositions called also proposition
variables. These atomic propositions are combined
through a number of logical connectors, including
the classic connectors (and, or, not, etc) and other
operators called modalities.
Linear logics focus on the executions of the
system without taking into consideration the
interweaving of the different possible futures at a
given point during the execution. In our approach,
we will focus on CTL (Clarke et al., 1986), which
ThroughaFuzzyCTLLogicforModellingUrbanTrajectories-AFrameworkforModellingCityEvolutionfromPastto
Future
515
has a representation in the form as a tree of possible
executions. CTL offers the possibility to have
several solutions over time and to model trajectories
due to the branching aspect.
3.2 Modal Logic
In addition to the temporal logic, the elaboration of
the trajectory requires also the use of a modal logic
to express the possibility, prohibition, doubt, etc.
about a logical proposition (c.f. Chellas (1980)).
Modal logic is similar to traditional logic with the
additions of modalities of possibility ("may be p", "it
is possible that p") and modalities of the necessity
("necessarily p", "it is necessary that p"). In addition
to the alethic modalities which are the modalities of
necessity and possibility, modal logic handles also
the modalities of the impossibility ("it is impossible
that p"), the modalities of the belief ("we believe that
p"), the modalities of the knowledge ("it is known
that p") and the deontic modalities such as (" it is
obligatory that p"," it is allowed that p").
3.3 Fuzzy Logic
The fuzzy logic (c.f. Dubois and Prade (2000))
offers the ability to deal with the vagueness through
the representation of each concept by a fuzzy set. A
fuzzy set characterized a concept through its
possible domain values using a membership function
taking values in [0,1]: 0 the confidence in the
domain value for the concept is null, 1 the domain
value is possible, and, in between, the greater the
degree, the higher the confidence. On those sets,
some operators such as AND, OR, NOT, etc. have
been introduced in the literature. Using the three
previous logics, we propose a framework that allows
dealing with soft urban trajectories.
4 OUR FRAMEWORK
In our context, which is the urban objects' evolution
modelling, it has to consider three parameters: time,
space and function of the object (school, business,
etc.). The construction of this trajectory will provide
a global view of the various changes that the city
will undergo. It also enables to predict its functional
and spatial mutations. It is thus possible to answer
questions like "How such a place will evolve?"
"What will be the function of a given place at a
particular time?" etc.
4.1 Fuzzy Object
This work is based on a fuzzy representation
introducing various degrees of membership of an
object to the time, to its function, and to the space as
mentioned previously. Therefore, for each object o
l,
our system may return a triplet of fuzzy sets:
<FTime
ol, FSpaceol, FFunctionol> with respectively
the membership functions <fTimeol, fSpaceol,
fFunction
ol>.
At a state m, one may evaluate the confidence in
the possible presence of the object, called likelihood
coefficient LK
m with the timestamp ti, function Fk,
the shape (geometry) Sj using the Zadeh t-norm:
LKm=
min(fTimeoj(ti),fFunctionoj(Fk),fSpaceoj(Sj))
(1)
4.2 Soft Urban Trajectories
In our context, in place of classic triplet, we have
triplet of fuzzy sets. Therefore for each object ol, we
may obtain at each ti a set of triplet <t
i, Sj, Fk> from
the domain values <FTimeol, FSpaceol, FFunctionol>.
Each triplet may represent a possible state m of the
object. We can, thus, compute for each state m the
likelihood coefficient LK
m. Thus each state of the
model will be described by the quad <time, space,
function, likelihood coefficient>, i.e. <t
i, Sj, Fk,
LKm>.
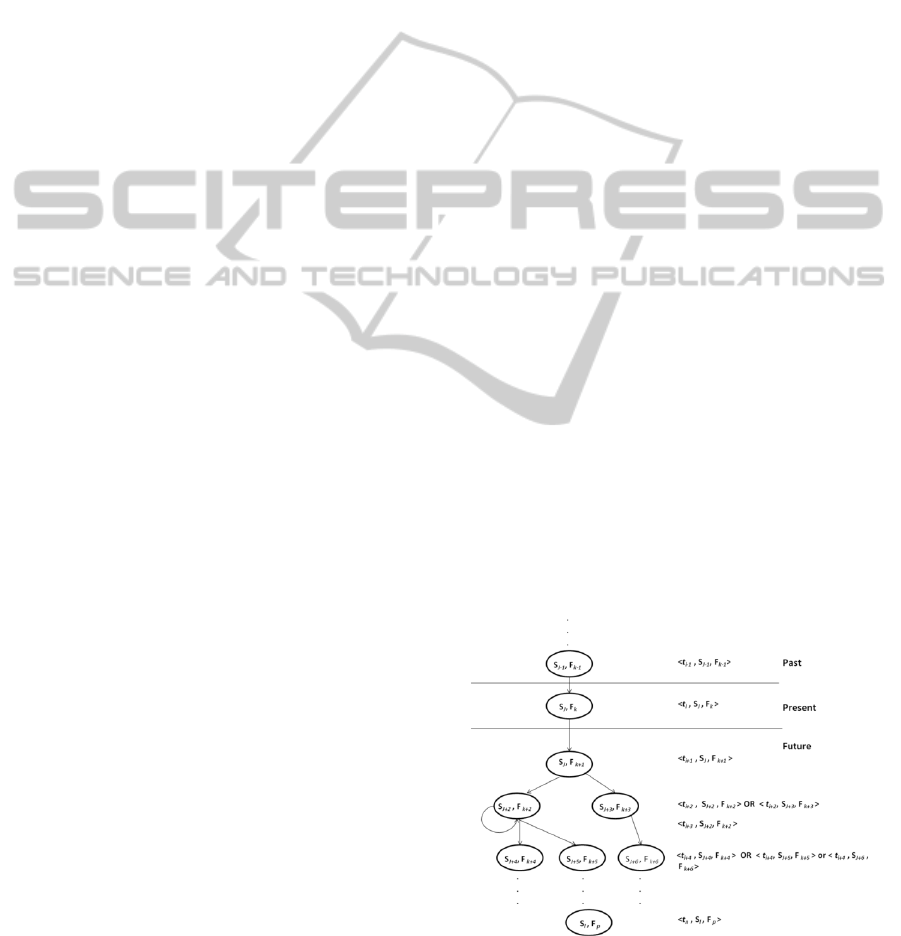
We have valued hypotheses of object presence
over time. Therefore, the use of temporal logic is
important in order to obtain the possible object
mutations and the possible city model evolution. The
main goal is to compute also a confidence index we
may have in the global evolution model.
Figure 2: K transitions of an urban object over time with
likelihood coefficient.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
516
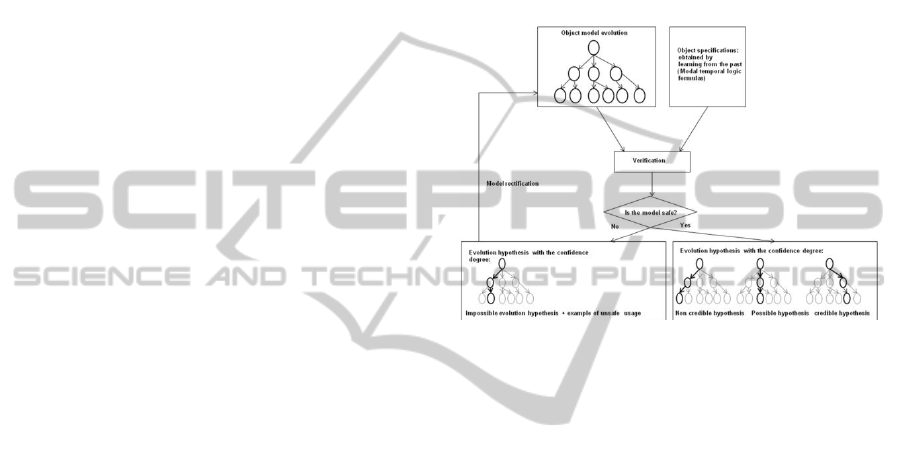
Figure 2 illustrates an example of the different
possible transitions of an urban object from the
instant t
i+1 to tn. At the instant ti+1, the likelihood
coefficient LKm is assigned to the first state which
has the function Fk+1 and which will take place at the
space S
j+1. At the instant ti+2, two possible transitions
are derived from the previous state leading to two
possible states. LK
m+1 is assigned to the first state
with the parameters <t
i+2, Sj+2, Fk+2> and LKm+2 is
assigned to the second state <ti+2, Sj+3, Fk+3>, and so
on.
4.3 New Operators for Reasoning
in Our Framework
By proposing a modal temporal logic, we aim to
define in space the points that form the trajectory of
the city at an instant t
i+1. In order to deal with the
previous aspect (modality, fuzziness), we define 3
thresholds: the α-mean, the α-min and the α-max of
the set of confidence degree LK
m.
We propose 4 new modal operators that we will
deal with in addition to the classic CTL operators.
At t
i:
N:
∃
<ti, Sj, Fk, LKm> such as LKm < α-mean (2)
P:
∃
<ti, Sj, Fk, LKm> such as LKm ≥ α-mean (3)
Z:
∃
<ti, Sj, Fk, LKm> such as LKm = α-min (4)
T:
∃
<ti, Sj, Fk, LKm> such as LKm ≥ α-max (5)
N is true when it exists, at a time t
i, a state <ti, Sj, Fk,
LK
m> where the confidence degree is lower than the
minimum of the confidence degree. The evolution
hypothesis <t
i, Sj, Fk > is then rather non credible. If
P is true, then the hypothesis is rather possible.
When Z is true, the hypothesis is impossible. When
T is true, <t
i, Sj, Fk> is credible.
4.4 Model Checking
Then we may combine the CTL and our operators in
order to define an axiomatic that will be checked
using a model-checking in which we may obtain
both a confidence index in the model and a conflict
index (using spatial constraint and logic). We will
adapt the model-checking (Clarke et al., 1986)
during the analyzing step.
Figure 3 illustrates the operational principle of
the model checker that will be developed for the city
evolution verification. The urban object’s model
evolution will be verified based on a set of
specifications. These specifications are in the form
of rules formulated in the modal temporal logic and
obtained through a learning process carried out on
old maps and plans of the city. The application of
the verification algorithm indicates if the model is
safe or not safe. If the model is safe, the evolution
hypothesis is, then non credible, possible or credible.
The evolution hypothesis is returned with the
confidence degree. If the model is not safe that
means that the evolution hypothesis is impossible.
The latter is returned with the confidence degree and
an example of an unsafe usage.
Figure 3: The model checking adapted to our framework.
5 CONCLUSIONS
In this paper, we introduce a new framework for
modelling and reasoning on urban trajectories. Its
main goal is to take into consideration the whole
complexity of urban objects from their definition
(vagueness, imprecision, space-time-function) to
their exploitation (valued temporal and modal logic)
through a unique and complete framework. In order
to model our data and to produce new evolution
scenarii, our approach uses modal, temporal, and
fuzzy logics in a new kind of GIS.
REFERENCES
Burrough, P. A., McDonnell, R., 1998. Principle of
Geographical Information Systems, Oxford University
Press.
Chellas, B. F., 1980. Modal logic, an introduction,
Cambridge University Press.
Clarke, E. M., Emerson, E. A., Sistla, A. P., 1986.
Automatic Verification of Finite-State Concurrent
Systems Using Temporal Logic Specifications, ACM
Transactions on Programming Languages and
Systems, Vol. 8(2), pp. 244–263.
Dubois, D., Prade, H., 2000. Fundamentals of fuzzy sets.
ThroughaFuzzyCTLLogicforModellingUrbanTrajectories-AFrameworkforModellingCityEvolutionfromPastto
Future
517

The Handbooks of Fuzzy Sets Series. Vol. 7. Springer.
Güttin , R. H., B’hlen, M. H., Erwing, M., Jensen, C. S.,
Lorentzos, N. A., Schneider, M., Vazirgiannis, M.
2000. A foundation for representing and quering
moving objects. ACM Transactions on Database
System, Vol 25(1), pp. 1–42.
Peuquet, D. J., 2002. Representations of Space and Time,
The Guilford Press, N.Y.
Pumain, D., Bretagnolle, A. Glisse, B. 2006. Modeling the
future of cities. ECCS’06, In Proceedings of the
European Conference of Complex systems, Oxford,
pp. 25–29.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
518
