
Optimal Decision Making in Agent-based Autonomous Groupage Traffic
Stefan Edelkamp and Max Gath
Center for Computing and Communication Technologies, Institute for Artificial Intelligence,
University of Bremen, Am Fallturm 1, 28359 Bremen, Germany
Keywords:
Operations Research, Decision Making, Multiagent Simulation, Asymmetric TSP, Logistic Processes.
Abstract:
The dynamics and complexity of planning and scheduling processes in groupage traffic require efficient, proac-
tive, and reactive system behavior to improve the service quality while ensuring time and cost efficient trans-
portation. We implemented a multiagent-system to emerge an adequate system behavior and focus on the
decision making processes of agents that is based on the Traveling Salesman Problem (TSP) with aspects like
contract time windows, individual restricted capacities of trucks, premium services and varying priorities of
dynamically incoming orders. We present an optimal depth-first branch-and-bound asymmetric TSP solver
with constraints on tour feasibility and depot reachability at any step of the process. To evaluate our approach,
we use established benchmarks as well as its inclusion in a real-life multiagent-based simulation. Simulated
scenarios are based on real customer orders of our industrial partner Hellmann Worldwide Logistics GmbH &
Co. KG and are applied on real world infrastructures. The results reveal that efficient optimal decision making
in multiagent systems increases the service quality and meets the requirements and challenges in logistics.
1 INTRODUCTION
In this paper we present an approach to optimize the
planning and controlling processes in groupage traf-
fic to improve the service quality while ensuring cost-
and time-efficient transport processes. To meet the
high requirements on complexity and dynamics, we
implemented a multiagent system to ensure a flexible
system behavior and developed efficient, optimal de-
cision making algorithms for participating agents.
In transport logistics the decision making often re-
lies on efficient solutions to the Traveling Salesman
Problem (TSP), a touchstone for many general ap-
proaches in combinatorial optimization. In our ap-
plication of a forwarding agency, the TSPs are gen-
erated via shortest paths reductions of route networks
between pickup or delivery stops. Each order to be
served corresponds to one city in the TSP. Symmet-
ric TSPs (STSPs), for which edges cost are the same
in both directions, are usually optimally solved with
algorithms relying on the quality of the Held-Karp
lower bound (Johnson et al., 1996).
Due to one-way streets in this paper we consider
Asymmetric TSPs (ATSPs), where other bounds ap-
ply (Miller and Pekny, 1991; Karp and Steele, 1990).
Most of them consider the solution of the according
Assignment Problem (AP), which can be solved by the
Hungarian algorithm or refined approaches (Jonker
and Volgenant, 1986), followed by some tour patch-
ing strategies. ATSPs can be converted into STSPs,
but this requires doubling the number of cities. Em-
pirical TSP exploration results often partially refer to
the 8th DIMACS Challenge. As an example, depth-
first branch-and-bound (DFBnB) has been refined for
the TSP (Zhang, 2000).
Many additional constraints apply in practice. Be-
sides capacity and time constraints we have a cer-
tain mix of pick-up and backhaul and premium ser-
vices constraints to be served in the tour, while oth-
ers non-premium services are optional (but should
be maximized). We also consider TSPs with de-
livery and backhauls (Gendreau et al., 1996); not
to be mixed with delivery and pick-up (Anily and
Mosheiov, 1994). For the TSP with release and due
time window constraints (TSPTW), exact dynamic-
programming algorithms exploit elimination tests to
reduce the state space (Dumas et al., 1995). Vari-
ants can also be applied to TSPTW problems with
precedence constraints. Frequently, branch-and-cut
algorithms are the method of choice (Ascheuer et al.,
2001). Introducing capacities constraints links to con-
straint solving. With the mix of premium and non-
premium tasks we generate a preference problem that
includes a combination of hard and soft constraints.
Determining the optimal solution for the vehicle rout-
ing problems (Baldacci et al., 2012) with capacity,
248
Edelkamp S. and Gath M..
Optimal Decision Making in Agent-based Autonomous Groupage Traffic.
DOI: 10.5220/0004256702480254
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 248-254
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

time and premium services constraints, backhauling
and dynamic change becomes practically intractable.
2 DISPATCHING IN GROUPAGE
TRAFFIC
In groupage traffic, several orders to different desti-
nations with less-than-truckload (LTL) shipments are
served by the same truck to decrease total cost. In
pickup tours, trucks transport loads from their origin
to a local depot where the shipments are consolidated
to build economical loads. Through LTL networks the
load is transported to a depot in the destination area
where each good is delivered to its final destination.
The process planning complexity is even increased by
individual qualities of shipments like weight, volume,
priority, and value. Handling the complexity is ag-
gregated by the high degree of dynamics that result
also from unexpected events, such as an exact amount
and properties of incoming shipments are not known
in advance.
Quality of service is an important factor to suc-
ceed the economic objectives. The transportation of
so-called premium services must be guaranteed with
respect to their time windows while considering other
hard constraints, e.g., the capacity of vehicles. In or-
der to increase service quality through short transit
times and reliable deliveries it is mandatory to handle
the high degree of dynamics and complexity of logis-
tic processes with adaptive, reactive system behavior.
By delegating the planning and controlling pro-
cesses from central decision making systems to de-
centralized entities, e.g., agents that represent vehi-
cles, the overall problem is split into smaller problem
instances that can be solved optimally. Regarding the
dispatching processes each vehicle has to find a tour
with minimum costs, such that each pickup and deliv-
ery stop is visited exactly once and the tour returns to
a central depot. This problem can be described by a
TSP with stops i, i ∈ {1,2,.. .,n}. All distances be-
tween two stops i and j given by c
i, j
∈ R with c
i,i
= 0
for 1 ≤ i, j ≤ n. Feasible solutions are permutations
of (1,2,. .., n) with the additional constraint that the
first city to visit is the current position of the truck and
the last city is the depot. Real transport infrastructures
are commonly represented by directed graphs, so that
we search an optimal tour for an ATSP.
In logistic transport networks participating for-
warding agencies have to pay high amounts of penalty
if they are not fulfilling the agreed commitments.
Therefore, we distinguish hard premium service con-
strains that must be delivered on date of receipt and
soft non-premium services constraints that can be de-
layed by up to 2 days.
Definition 1. Pickup and delivery of premium ser-
vices is mandatory and defined by
p
i
=
1, if i is a premium stop
0, otherwise
(1)
Hence, the priority of premium stops is higher
than visiting other stops.
Definition 2. The optimal tour of the asymmetric TSP
must be feasible and fulfill the following requirements
ordered by their priorities for the variables
x
i, j
=
1, if (i, j) is part of the tour
0, else
(2)
1. Maximize the number of transported premium ser-
vices: max
∑
n
i=1
∑
n
j=1
p
i
· x
i, j
2. Maximize the number of visited stops:
max
∑
n
i=1
∑
n
j=1
x
i, j
3. Minimize the total cost of the path:
min
∑
n
j=1
∑
n
i=1
c
i, j
· x
i, j
subject to
(a)
∑
n
i=1
x
i, j
= 1 for all j ∈ {1,... ,n}
(b)
∑
n
j=1
x
i, j
= 1 for all i ∈ {1,. .., n}
(c) x
i, j
=
{
0,1
}
for all j,i ∈ {1,... ,n}
(d)
∑
j∈S
∑
i∈S
x
i, j
≤ |S| −1 for all S ≤
{
1,.. .,n
}
We assume that all premium stops have to be tra-
versed such that we have to find the tour with min-
imum costs that includes all premium services and
the maximum number of stops while satisfying all
time and capacity constraints. Therefore, the problem
changed into a maximizing-minimizing problem.
3 CONSTRAINT ATSP SOLVING
To apply Branch-and-bound (BnB), we extend depth-
first search (DFS) with upper and lower bounds. To
determine lower bounds for the ATSP, we transform it
into the Assignment Problem (AP), that can be solved
with the Hungarian algorithm (Jonker and Volgenant,
1986) in O(n
3
). While the AP is a relaxation of the
asymmetric TSP, it can be used as heuristic function
for the ATSP. In order to solve the AP, we extend
the cost matrix with the distance from the depot to
the current node (we want to return to the central de-
pot which is not necessary the starting point). After
solving the AP, we subtract it to compute the current
lower bound. For increasing the upper bound (which
is the sum of the weights in the subgraphs) we de-
termine the minimum value to merge the subgraphs
of the AP by comparing the respective columns and
rows in the cost matrix and choosing the arcs with
minimum costs.
OptimalDecisionMakinginAgent-basedAutonomousGroupageTraffic
249

An initial upper bound can be obtained by con-
structing any solution, e.g., established by a greedy
approach. Unfortunately, for lager TSPs the branch-
ing process consumes a lot of time to determine a
greedy solution. Therefore, we additionally computed
the upper bound U at each node by applying Karp-
Steel patching (Karp and Steele, 1990). As with stan-
dard DFS, the first solution obtained might not be op-
timal. With depth-first BnB (DFBnB), however, the
solution quality improves over time together with the
global value U until eventually the lower bound L(u)
at some node u is equal to U. In this case an optimal
solution has been found, and the search terminates.
A Constraint ATSP is an ATSP in which addi-
tional state constraints are applied. As states are only
discarded from the search that do not fulfill the con-
straints. This weakens but does not invalidate the
lower bound. For example time and capacity con-
straints as well as priorities have to be satisfied.
For time constraints, the due date d
i
for latest
pickup (or delivery) at each stop i ∈ {1, ... ,n} has to
be met. Each stop may require additional individual
processing time δ
i
(e.g., for loading), which can be
compiled away (the solution value then changes by
∑
n
i=1
α
i
). In some cases, release date r
i
, i ∈ {1,. .., n}
are given, at which the order at stop i becomes issued.
If the arrival is too early, we have to wait for time β
i
.
For the TSPTW we choose the next time for
traversing the edges to be minimized rather than the
total time, which, nonetheless, is progressed for adap-
tion to release and checking with due dates. The travel
time between stops π
i
and π
j
on tour π is denoted by
t
i, j
, i, j ∈ {1,. .., n}. Additional capacity constraints
for the vehicle yield a Capacitated TSP (CTSP).
Definition 3. Let w
i
be the freight weight at stop i
and ∆
w
be the max. weight of the vehicle. A tour π
with stops
{
π
1
,.. .,π
n
}
and depot d is feasible for the
CTSPTW if for all i = 1,2,. .., n we have
∑
i
l=1
(α
i
+
β
i
+t
i−1,i
) ≤ d
i
,
∑
i
l=1
w
i
≤ ∆
w
, and d = π
n
.
The pseudo-code is shown in Alg. 1. The proce-
dure is invoked with the number of cities n the depot
d, cost 0 and upper bound U set to some reasonable
estimate (U can obtained using some heuristics; the
lower it is, the better the pruning, but in case no upper
bound is known, it is safe to set U to ∞). The tour
is maintained globally and updated during backtrack-
ing. Another global variable best keeps track of the
actual solution path. DFBnB sorts the set of succes-
sors according to increasing L-values is an optional
refinement to the algorithm that often aids in acceler-
ating the search for finding an early solution.
Release and due dates in TSPTWs induce a prece-
dence relationship at each city. The relationship im-
plies a partial ordering, so that a city can be selected
Algorithm 1: DFBnB for Constraint TSPs.
DFBnB(n,u,g,U)
tour
depth(u)
← u
if (depth(u) = n − 1)
if (g + c
u,d
< U)
best ← tour; U ← g + c
u,d
else
for each v
j
in nextcities(u)
if Constraint(v
j
)
if (g + h(v
j
) < U)
call DFSBnB(n,v
j
,g + c
u,v
j
,U)
as a successor of city only if it does not violate the
imposed ordering. Given a bitvector of cities visited
so far the subsumption check for precedence can be
executed by native Boolean operations in O(1). Simi-
larly, premium services are checked on the word level.
Theorem 1. Alg. 1 is optimal for admissible lower
bounds, and the above pruning rules.
Proof. If no pruning was taking place, every pos-
sible solution would be generated, so that the optimal
solution would eventually be found. Sorting of chil-
dren according to the L-values has no influence on the
algorithm’s completeness. The condition L(v
j
) < U
confirms that the node’s lower bound is smaller than
the global upper bound. Otherwise, the search tree is
pruned, as for admissible weight functions exploring
the subtree cannot lead to better solutions than the one
stored with U. All further pruning rules (like prece-
dence or premium service pruning), cut off infeasible
branches from the search tree so that the solution will
be optimal for the TSP. Precedence pruning retains
optimality for the TSPTW, while capacity pruning re-
tains optimal for CTSP, etc.
With h
a
we define the heuristic that is derived
from solving AP. The Hungarian algorithm for com-
puting the solution as well as lower bound off-
sets based on the tour being Hamiltonian takes time
O(n
3
). It can be incrementally be computed in O(n
2
),
but bookkeeping becomes involved. With h
c
we de-
fine the heuristic that is defined as the sum of the
column minima in the distance matrix. If cities are
visited, column minima are subtracted from the sum.
The travel distance back to the depot is added on top.
We compute h
c
incrementally in O(1) time and space.
Let u be the successor of v, and m
i
be the precom-
puted minima of columns i, i = {1,.. .,n} in distance
matrix D. Moreover, let the heuristic value of the de-
pot d be defined as h
c
(d) =
∑
n
i=1
m
d,i
. For each ex-
panded node u we compute h
0
= h(u) − m
d
if u = d,
and h
0
= h(u) − c
u,d
, otherwise. For each generated
successor v of u we have h
c
(v) = h
0
− m
v
+ c
v,d
.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
250

An advantage of the tree structure is that the con-
straints are checked in constant time and space. The
current time, capacity and premium service informa-
tion are stored at each node. Considering the time
efficiency of the algorithm, bit-vectors are realized
by one computer word: we have bit-vectors for the
visited cities, the relative ordering among them im-
posed by the time window, and the priority service
constraints. All bit-vector operations (setting, clear-
ing of bits, check for subsumption) run in O(1).
Theorem 2. Let w be the word width of the computer.
The incremental solver for the asymmetric TSP with
time windows, capacity, and premium service con-
straints and heuristic h
c
runs in O(n/w) per node.
It allocates O((n/w) · n
2
) space in its initialization
phase and no more memory during the search.
Proof. The space consumed for the distance ma-
trices as well as their compression and copies is
O(n
2
). The matrices for successor reordering and fil-
tering take O(n
2
) and each state on the stack requires
O(n/w) space. As the stack is limited by the depth
times the number of successor, its memory needs
are also bounded by O((n/w) · n
2
). All other struc-
tures (tour covers, interval sizes, row and column cov-
ers and minima, partial ordering bitvectors, successor
sets, and visited flags) take at most O(n) space.
To determine the optimal solution for a TSP with
premium services we have to extend the algorithm.
All premium stops must be traversed so that we have
to find the tour with min. costs that includes all pre-
mium services and the max. number of stops while
satisfying all time and capacity constraints. There-
fore, the problem changed into a max.-min. prob-
lem and branching is not applicable by comparing
the costs to the lower bound L. We have to find a
feasible solution that includes all premium services
within max. search tree depth and the shortest dis-
tance within that depth.
To speed up search for a first solution in depth
n − 1, the computation of lower bounds is disabled
and a subtree is cut if the current tour is not a fea-
sible tour. The following rule prunes the tree using
bitvectors and Boolean operations. Before starting the
search, the premium services are sorted by their ca-
pacities. The number of premium services included
in the best solution is saved and updated if a bet-
ter solution is found. Next, we compute the differ-
ence ∆ between the number of currently included pre-
mium services and the amount of premium services
in the best-known solution. Afterwards, the weight of
∆ lightest not considered premium services is accu-
mulated and we check if they exceed the maximum
capacity of the truck. The solution remains optimal
and complete because a feasible solution with more
premium services exists. The pruning rule is applied
to regular orders accordingly if all premium services
are included within the tour. The application of this
pruning rule is optional, because it is done in O(∆)
time (for summing up the weight of not considered
orders). Nevertheless, it speeds up the algorithm if
good solutions are known in advance, the maximum
capacity of the truck is reached, and no more orders
can be operated. In this case big subtrees are pruned
early. If we find a first feasible complete tour objec-
tives 1. and 2. in Def. 2 are fulfilled. The remaining
objective is to reduce the total cost and the problem
has changed to a classical TSP with constraints. As
a result, the computation of lower and upper bounds
described above is activated. In this case, less nodes
are expanded because the searching process is goal-
directed. If heuristic h
a
instead of h
c
is activated, the
efforts at each node are higher.
4 AGENT-BASED DISPATCHING
AND SIMULATION
To cope with the dynamics and complexity of lo-
gistic processes, we are implementing autonomous
groupage traffic with agent technologies. The agent
system induces a proactive, reactive, and adaptive sys-
tem behavior. Agent-based commercial systems are
used within the planning and controlling processes
of containerized freight (Dorer and Calisti, 2005).
Team formation and interaction protocols have been
designed for efficient resource allocation (Schuldt,
2011). Agent-based systems have optimized plan-
ning and controlling processes within dynamic envi-
ronments (Fischer et al., 1995). Other ranges of appli-
cation have been provided for industrial logistic pro-
cesses (Skobelev, 2011).
In our setting agents represent trucks and orders.
Whenever a new transport request has to be aced
upon, a new agent is created that represents an or-
der. The goal of the agent is to find a proper transport
service provider to pickup or deliver the shipments
with respect to the time windows and premium ser-
vice constraints. The agent starts the contract-net pro-
tocol for negotiating with available transport service
providers. All operating trucks are represented by an
agent as well. The truck agents evaluate the propos-
als by determining its additional costs for transport-
ing. This is done by solving the TSP optimally that is
specified in Def. 2 while considering time and capac-
ity constraints with the algorithm described in Sec. 3.
In order to schedule new orders also while transport-
ing other shipments, the truck has to consider its cur-
rent capacity constraints and position. For example,
OptimalDecisionMakinginAgent-basedAutonomousGroupageTraffic
251

picked up shipments reduce the capacities and the po-
sition of the vehicle affects the determination of short-
est ways and tours. Consequently, we link the plan-
ning and decision making processes of the agents di-
rectly with their execution behaviors and consider all
relevant observed changes of the environment as well
as the internal state of the agent within the decision
making and tour planning. On the other hand, new
plans can effect the executed actions of the agents.
Therefore, the truck agent checks during driving, if
the next stop has changed and if necessary he adapts
the tour. In real processes as well as in the simula-
tion the handing processes (boarding and deboarding
of shipments) must not be interrupted. This require-
ment is satisfied by not adopting plans that manipu-
lates the running handling processes.
To transport a premium service instead of conven-
tional orders or another premium service by driving a
shorter distance, already accepted orders may not be
included in the new plan. If these orders have not been
boarded the truck agent sends a message to the agent
that acts on behalf of the corresponding order. Af-
terwards, the order agent negotiates with other trans-
port service providers again. Potentially, this results
in a series of computation and communication inten-
sive negotiations between agents to achieve small im-
provements. To weaken this effect (especially if sev-
eral shipments are processed consecutively within a
short time window and the global allocation changes
significantly) the agent waits for a certain period of
time before it starts the negotiation procedure. For op-
timal decision making agents have to solve a TSP for
each proposal. Consequently, numerous TSPs have to
be solved in the planning and controlling processes.
Applying simulation for evaluating multiagent
systems before their deployment in real applica-
tions is an accurate cost and time reducing method.
Our system PlaSMA (http://plasma.informatik.uni-
bremen.de) extends the JADE framework (Bellifem-
ine et al., 2007) and provides a discrete time sim-
ulation that ensures a correct conservative synchro-
nization with time model adequacy, causality, and
reproducibility. The transport infrastructure within
the simulation environment is modeled as a directed
graph. Nodes represent traffic junctions or logis-
tic sources and sinks, while edges represent differ-
ent types of ways, e.g., roads, motorways, trails, and
waterways. To model sound planning and control-
ling processes in the logistic domain, we extended our
system to import infrastructures from OpenStreetMap
(OSM) databases. The directed graph includes infor-
mation about the real worlds speed limits, the dis-
tance as well as the type of an edge. Particularly
within large infrastructures determining the shortest
path between nodes is an essential, costly, and time-
consuming procedure within the decision making pro-
cess of an agent. However, computing the distance
matrix between cities is essential for solving the TSP
on a shortest path reduced graph. Consequently, we
implemented single-source shortest paths search (Di-
jkstra, 1959) with a memory-efficient joint represen-
tation of graph and heap nodes. Computing a dis-
tance matrix requires many shortest-path queries with
a fixed starting node and is time-critical. Hence, we
adapted the search procedure and saved the last vis-
ited nodes within a hash map as well as in the heap as
long as the start node has not changed. While process-
ing new search requests we check in constant time, if
the shortest path to the node was already found and
retrieve the corresponding node from the heap. Oth-
erwise, shortest path search is continuing at the last
expanded node. We extended the search with a cache.
5 EVALUATION
In the first setting (all experiments were run on an In-
tel i7 processor with negligible RAM requirements;
see Theorem 2) we generated a fully-connected ran-
dom graph of k nodes with edge weights in [0..C].
With C = 10 our solver can handle problems with 500
cites. For C = 100, and up to 100 cities the experi-
mental outcome shows that there are rare unfortunate
cases that need hours for computation, but generally
remain tractable. For smaller values of n (the number
of cities) and more complex TSPs, our incremental
solver with constant time per node was often more ef-
fective than computing a lower bound by solving the
Assignment Problem (Jonker and Volgenant, 1986) at
each node.
Next, we extended the solver with time windows
and focus on the performance of applied heuristics.
As release and due times are more difficult to gen-
erate randomly, we took an existing benchmark set
of TSPTW problems (Dumas et al., 1995). The re-
sults in Table 1 examine the search efforts for DF-
BnB with h
a
and h
c
(see Sec. 3). While the number of
nodes is substantially lower for h
a
, the solving time is
sometimes (but not always) larger than for h
c
, indicat-
ing that the more constraint the problem is, the worse
the AP approximation and the better the search with
a simpler heuristic. Note that the best results were
obtained with a combination of both heuristics, using
the more expressive one in the top part of the tree and
the less expressive one in the bottom part of the tree.
To investigate the interactions between agents we
implemented several scenarios within PlaSMA. The
transport infrastructure contains 124,462 nodes and
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
252
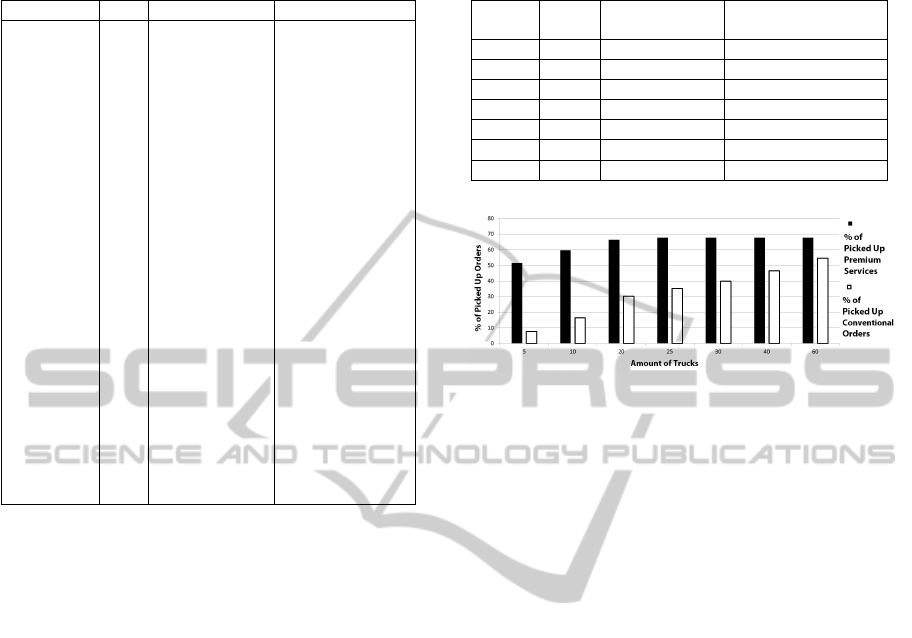
Table 1: Results in Dumas’ TSPTW Benchmark (Exp.
nodes and CPU time for the two heuristics are shown).
Prob. Cost E
a
T
a
E
c
T
c
n20w20.001 378 49 < 1s 2784766 < 1s
n20w20.002 286 97 < 1s 3234936 < 1s
n20w20.003 394 138 < 1s 4944477 < 1s
n20w20.004 396 156 < 1s 2331312 < 1s
n20w20.005 352 41 < 1s 4017260 < 1s
n20w40.001 254 38022 3s 103087541 18s
n20w40.002 333 88 < 1s 11388523 2s
n20w40.003 317 1409 < 1s 21158796 3s
n20w40.004 388 7676 1s 35117607 6s
n20w40.005 288 10287 2s 20801644 3s
n20w60.001 335 40810 14s 223904879 43s
n20w60.002 244 97144 7s 81367918 15s
n20w60.003 352 399127 27s 31292739 5s
n20w60.004 280 4055453 258s 1245195466 238s
n20w60.005 338 105393 10s 104049862 18s
n20w80.001 329 316992 35s 288653549 56s
n20w80.002 338 260552 36s 166880630 33s
n20w80.003 320 15959 3s 208526467 42s
n20w80.004 304 1258898 80s 373077547 73s
n20w80.005 264 5224435 438s 1660621704 332s
n20w100.001 237 1635101 52s 1232596799 279s
n20w100.002 222 68954 7s 2203174867 531s
n20w100.003 310 13382035 765s 2586795810 538s
n20w100.004 349 34289 2s 1213551958 266s
n20w100.005 258 688887 44s 2308713055 548s
292,521 edges. Orders and transport requests were
provided by the Bremen office of Hellmann World-
wide Logistics GmbH & Co. KG. We started a reverse
geocoding process to map the address information to
coordinates and determined the nearest neighbor node
in the map, to link the addresses with graph nodes.
The real weight, premium service constraints, latest
delivery times as well as the incoming dates are at-
tached with the order. Since exact delivery times are
not available, only the date is considered during eval-
uation. As a result, we modeled the dynamics by gen-
erating new orders successively until all orders of this
day have been dispatched. In real transport processes,
vehicles with interchangeable units are sent to stops
where numerous shipments have to be handled. Con-
sequently, we did not consider orders if more than six
orders had to be picked up at the same stop. While the
dynamics of the planning and controlling processes
of delivery tours are limited due to the fact that ship-
ments have to be loaded at the depot in the morning
and cannot be changed anymore, we only consider
pickup orders and simulate the planning processes si-
multaneously to the execution of plans.
We assume that tours start at 7am at the depot and
the vehicle must return not after 4pm. Moreover, the
average velocity of a truck is set to 60 km/h, all trucks
have a maximum possible capacity of 7.5 tons and a
truck starts only one tour per day. The handling and
waiting periods at incoming goods departments is half
an hour.
Table 2: CPU time in ms for solving the TSP as well as for
shortest path searches during the matrix computations.
#Trucks #TSP time for time for
solving TSP in ms matrix computation in ms
5 6,122 199,043 4,912,094
10 11,893 324,566 16,588,955
20 22,457 604,675 56,845,930
25 26,751 972,579 75,882,546
30 31,542 2,246,511 94,921,678
40 40,759 7,979,063 144,742,544
60 56,152 79,704,147 225,749,232
Figure 1: Black/White bars show the percentage of picked
up premium/conventional services in the selected scenario.
We modeled seven scenarios. In each scenario
1,265 orders are distributed within a whole week
while the number of trucks is varying. About six per-
cent of the total amount of modeled orders are pre-
mium services. Table 2 shows the computation times
elapsed during each simulation run for computing the
distance matrix with the shortest-path algorithm as
well as the time for solving the TSP specified in Def. 2
while cons. The results reveal that more computation
time is required for the reduction of the real world in-
frastructure graph to a minimum distance matrix be-
tween relevant nodes than for optimally solving of the
TSP. Consequently, the shortest path matrix computa-
tion is the most expensive part of the decision making
process of the agent, if we are considering the com-
putational effort. Moreover, Table 2 indicates that the
amount of TSPs rises with the number of available
trucks. This is obvious, because the TSP solver is an
essential part within the decision making process of
each truck.
Fig. 1 shows the percentage of picked-up premium
and conventional orders within each scenario. Con-
sequently, the agent system serves premium services
with higher priorities. Even with 5 trucks nearly 50%
of all premium services are sill picked up, while pro-
cessing more than 90% of conventional orders are
postponed to other days. An increase of the num-
ber of available trucks leads to processing more pre-
mium services as well as more conventional orders.
If about 70% of all premium services were satisfied,
only transported conventional orders increased. How-
ever, not more than 70% of all premium services are
transported even if enough trucks are available. We
OptimalDecisionMakinginAgent-basedAutonomousGroupageTraffic
253

assume, this is explained by the scenario assumptions
in combination with the customer orders. For exam-
ple, if the max. velocity of trucks is set to 60 km/h,
it is not possible to pick up premium services with a
distance of more than 60 km at 8am, if the trucks start
the transporting process at 7am.
6 CONCLUSIONS AND
OUTLOOK
We developed a dispatching system matching the re-
quirements of forwarding agencies in groupage traf-
fic. To face the dynamics of consecutively incoming
orders and the high complexity of logistic processes,
we implemented a reactive and proactive multiagent
system. The agents link the planning and schedul-
ing processes directly with their actions. Therefore,
changes of the environment can be considered dur-
ing runtime and induce a reactive behavior. We fo-
cused on the planning and decision making processes
of the agents and developed an efficient TSP solver
that is crucial for negotiation with service customers
agents. The optimal branch-and-bound TSP solver is
time and space efficient: it checks resource, time, and
premium service constraints in O(1) time and space
per generated node. Moreover, after the allocation of
O((n/w)·n
2
) words at initialization time for the stack
contents and other structures (including copies of the
distance matrix) no additional memory is allocated
during the search. The performance was proven on ar-
tificial graphs with test sets from benchmarks (Dumas
et al., 1995) as well as in simulated real world scenar-
ios of an entire week by computing more than 56,000
TSPs including time windows, capacities, handling
times, and priorities.
In further investigations, we will evaluate the mul-
tiagent system on multiple computer and enable par-
allel decision making. As a result, trucks have suf-
ficient computational power to continue negotiating
with other trucks and improve the allocations consec-
utively. Applying the contract-net protocol in com-
bination with the optimal TSP solver, the negotia-
tions will converge in a global optimum (Shoham and
Leyton-Brown, 2009, p. 27).
ACKNOWLEDGEMENTS
The presented research was partially funded by the
German Research Foundation (DFG) within the Col-
laborative Research Centre 637 ”Autonomous Coop-
erating Logistic Processes: A Paradigm Shift and its
Limitations” (SFB 637) at the University of Bremen,
Germany. We thank the Bremen office of Hellmann
Worldwide Logistics & Co. KG for great cooperation.
REFERENCES
Anily, S. and Mosheiov, G. (1994). The traveling salesman
problem with delivery and backhauls. Operations Re-
search Letters, 16(1):11–18.
Ascheuer, N., Fischetti, M., and Groetschel, M. (2001).
Solving the asymmetric travelling salesman problem
with time windows by branch-and-cut. Math. Pro-
gramming, 90:475–506.
Baldacci, R., Mingozzi, A., and Roberti, R. (2012). Re-
cent exact algorithms for solving the vehicle routing
problem under capacity and time window constraints.
European Journal of Op. Res., 218(1):1–6.
Bellifemine, F., Caire, G., and Greenwood, D. (2007). De-
veloping Multi-Agent Systems with JADE. John Wiley
& Sons.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1:269–271.
Dorer, K. and Calisti, M. (2005). An Adaptive Solution to
Dynamic Transport Optimization. In AAMAS, pages
45–51.
Dumas, Y., Desrosiers, J., Gelinas, E., and Solomon, M.
(1995). An optimal algorithm for the travelling sales-
man problem with time windows. Operations Re-
search, 43(2):367–371.
Fischer, K., Mueller, J. P., and Pischel, M. (1995). Cooper-
ative Transportation Scheduling: An Application Do-
main for DAI. Journal of Applied Artificial Intelli-
gence, 10:1–33.
Gendreau, M., Hertz, A., and Laporte, G. (1996). The trav-
eling salesman problem with backhauls. Comp. & Op.
Research, 23(5):501–508.
Johnson, D. S., McGeoch, L. A., and Rothberg, E. E.
(1996). Asymptotic experimental analysis for the
Held-Karp traveling salesman bound. In SODA, pages
341–350.
Jonker, R. and Volgenant, A. (1986). Improving the hungar-
ian assignment algorithm. Operations Research Let-
ters, 5:171–175.
Karp, R. M. and Steele, J. M. (1990). Probabilistic analysis
of heuristics. In The Traveling Salesman Problem, E.
Lawler et al. (eds.), 181–205.
Miller, D. L. and Pekny, J. F. (1991). Exact solution of
large asymmetric traveling salesman problems. Sci-
ence, 251:754–761.
Schuldt, A. (2011). Multiagent Coordination Enabling Au-
tonomous Logistics. Springer Verlag.
Shoham, Y. and Leyton-Brown, K. (2009). Multiagent
Systems: Algorithmic, Game-Theoretic, and Logical
Foundations. Cambridge Univ Press
Skobelev, P. (2011). Multi-agent systems for real time re-
source allocation, scheduling, optimization and con-
trolling: Industrial applications. In HOLOMAS, 1–14.
Zhang, W. (2000). Depth-first branch-and-bound versus lo-
cal search: A case study. In AAAI, p.930–936.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
254
