
Enhanced Shortest Path Computation for Multiagent-based Intermodal
Transport Planning in Dynamic Environments
Christoph Greulich
1
, Stefan Edelkamp
1
, Max Gath
1
, Tobias Warden
1
, Malte Humann
1
,
Otthein Herzog
1
and T. G. Sitharam
2
1
Center for Computing and Communication Technologies, University of Bremen, Bremen, Germany
2
Center for Infrastructure, Sustainable Transportation and Urban Planning, Indian Institute of Science, Bangalore, India
Keywords:
Multiagent-based Simulation.
Abstract:
This paper addresses improved urban mobility using multiagent simulation. We provide a description of the
agent model and the routing infrastructure as a step towards a rich model of the interactions that happen
in intermodal transport planning tasks. The multiagent model is generic in the sense that different public and
individual transport agents and transportation agencies can be added and parameterized on-the-fly. It integrates
planning with execution. We show that a sequence of calls to Dijkstra’s single-source shortest-paths algorithm
is crucial for planning and provide an efficient memory-less implementation with radix heaps in order to make
this application feasible with respect to scalability. As a case study, we implement a scenario for Bangalore
(India), starting on a higher level of abstraction and drilling down to a running program.
1 INTRODUCTION
Under the umbrella term of smart mobility, the devel-
opment of forward-looking traffic concepts for fast-
growing metropolitan areas has attracted considerable
interest of regional authorities and transport planners.
In this context, optimized utilization of existing and,
potentially, planned traffic infrastructure, using new
mobility concepts has come in sharp focus.
Applying new traffic concepts to the real world
can be very expensive, especially when the given in-
frastructure has to be altered or new ressources have
to be acquired. Therefore, multiagent-based simula-
tion (MABS) can be used to procure well-founded as-
sessments of the impact of potential changes before
actual deployment. Agent-based traffic simulation
is an active research area (Chen and Cheng, 2010).
Various simulators are available, e.g., MATSIM and
SUMO.
Similar to Kl
¨
ugl and Rinsf
¨
user (Kl
¨
ugl and
Rindsf
¨
user, 2011), we do not concentrate on traf-
fic flow but on complex multimodal transportation
tasks. However, they provide a rather abstract model
that only contains dedicated route selection agents.
Our model is also related to the one introduced by
Meignan, Simonin, and Koukam (Meignan et al.,
2006) but is far more dependent on inter-agent com-
munication. We assume that information about possi-
ble travelling options can not be obtained directly but
must be requested from the respective transportation
service. Our main contributions are:
• push-button infrastructure map import from the
OpenStreetMap database yielding simulation re-
sults based on real-world transportation data.
• dynamic creation of agents in a multimodal route
planning environment and scalable integration in
a modern MABS system.
• a generic model for interleaved travel planning
and plan execution which includes replanning on
failure. While planning, the agents consider both
public and individual transportation options.
• enhanced shortest path planning in optimal linear
time with off-line space overhead of two pointers
per node and no additional space allocated during
the search.
Section 2 introduces MABS. Section 3 discusses
the proposed simulation model with a focus on the
implemented multiagent system. Section 4 provides
a time and space optimal implementation of Dijksta’s
algorithm. Section 5 specifies the agent configuration
used in our scenario and report on the feasibility as-
sessment of our implementation with results on sim-
ulation efficiency on the traffic infrastructure of Ban-
galore.
324
Greulich C., Edelkamp S., Gath M., Warden T., Humann M., Herzog O. and Sitharam T..
Enhanced Shortest Path Computation for Multiagent-based Intermodal Transport Planning in Dynamic Environments.
DOI: 10.5220/0004262103240329
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 324-329
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 AGENT-BASED SIMULATION
Any traffic simulation model can be classified by
its level of detail. While macroscopic models only
consider aggregated information, microscopic models
are based on detailed modeling of individual entities
(Hoogendoorn and Bovy, 2001).
Multiagent systems provide the capability to im-
plement microscopic models. Even though the defini-
tion of an agent is widely discussed, the most impor-
tant characteristic of an agent is its autonomy (Macal
and North, 2010): Every agent is a unique entity and
gains information by sensing its environment or by
social interaction with other agents. In addition, an
agent acts and reacts upon its own decisions which
are based on the individual goals of the agent and its
knowledge of the environment.
A MABS system can combine distributed
discrete-event or time-stepped simulation with
decision-making encapsulated in agents as separate
and concurrent logical processes. In classical simula-
tion systems, the involved logical processes as well
as interaction links have to be known in advance and
must not change during simulation. This is not the
case in MABS systems, as each agent may interact
with all other agents. Agents may join or leave
simulation during execution, e.g., depending on a
stochastic simulation model.
We use our event-driven MABS system which
has been designed to solve and evaluate scenarios
in the logistics domain. The system is based on
the Java Agent DEvelopment framework (Bellifem-
ine et al., 2007) and adds the functionality of a dis-
crete time simulation as well as conservative syn-
chronization with time model adequacy, causality and
reproducibility (Gehrke et al., 2008). In general,
our system architecture has the following compo-
nents: World model, physical objects, infrastructure
and agents including behaviour definitions.
The (physical) simulation world model of a sce-
nario can be modeled as a graph so that the infrastruc-
ture can be mapped accordingly. Graph nodes rep-
resent, e.g., traffic junctions. Graph edges represent
roads, rails, waterways, etc. In order to model real
transport processes, we extended our system to sim-
ulate scenarios within real traffic infrastructures that
1
4
3
2
BEH: Init
BEH: HandleInformationRequests
BEH: HandleBoardingQueries
BEH: HandleTransportRequests
Agent: ScheduledVehicleAgent
Agent: Person
Agent: Person
Simple Communication
FIPA IP Communication
State Transition
condition
Legend
Figure 1: Scheduled Transportation Company Agent.
are imported from OpenStreetMap databases. Agents
act either as artificial autonomous decision makers on
behalf of their associated entity within this model or
as background services, e.g., for creating additional
agents or providing information.
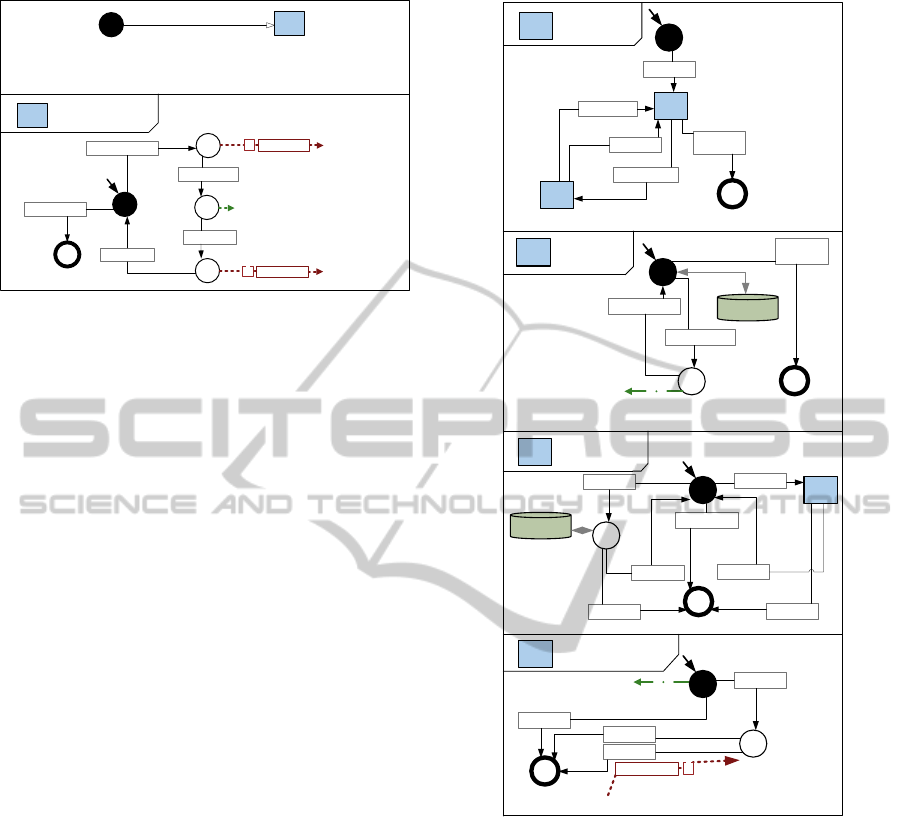
3 SIMULATION MODEL
We distinguish between simple behaviors (like Init or
HandleInformationRequests or Driving) and complex
behaviors (like TransportPassengers) that itself con-
sist of an arrangement of behavioral states (see Fig. 1
- 3). Complex behaviors are implemented in terms of
Finite-State-Machine (FSM) behaviors. FSM behav-
iors are labeled transition systems with a starting state
(indicated with an incoming arc), one or more ter-
minal states (encircled node), and several conditional
state transitions. The behaviors also include commu-
nication arcs (dashed) that show whether or not a be-
havior communicates with another agent. Addition-
ally, we show which agent poses shortest path queries
(SPS).
The Scheduled Transportation Company Agent is
an implementation of a transportation company that
provides an information infrastructure for answer-
ing initial transport queries (HandleInformationRe-
quests), sets-up and maintains a list of persons to
be picked up at stops for a specific vehicle (Handle-
BoardingQueries), and receives and answers trans-
port requests of persons at stops (HandleTransportRe-
quest).
The corresponding agent model is shown in Fig. 1.
After registration with the system wide directory fa-
cilitator and acquisition of time-table information
from a configuration file, the agent is responsible for
invoking time-dependent initialization of Scheduled
Vehicle Agent instances that represent the means of
transport. The sub-behaviors are spawned, and run in
parallel.
On its initialization, a Scheduled Vehicle Agent re-
ceives a schedule from the agency that it has to follow
on a daily basis. The time table information contains
the arrival and departing time of each stop in the tour.
If a vehicle is running late it usually tries to catch up
with its schedule, reducing waiting times. The Sched-
uled Vehicle Agent’s model is shown in Fig. 2. The
FSM behavior for scheduled driving mainly imple-
ments a cycle of boarding, debarking and moving.
Furthermore, it uses an interaction protocol to com-
municate with the transportation company agent to re-
ceive new instructions.
In addition, we implemented a Autonomous
Transportation Vehicle Agent which basically com-
EnhancedShortestPathComputationforMultiagent-basedIntermodalTransportPlanninginDynamicEnvironments
325
1
BEH: Init
2
BEH: ScheduledDriving
2
BEH: ScheduledDriving
FSMBehaviour
b
c
d
Unloading Done
Received List
Loading Done
Arrived at next Stop
BEH: Deboarding
BEH: RequestLoadInstructions
BEH: Boarding
BEH: MoveToNextStop
Agent: PersonAgent
Perf: INFORM
4
Agent: PersonAgent
Perf: INFORM
4
Agent: ScheduledTransportationCompanyAgent
a
c
BEH: Takedown
No next Stop left
Figure 2: Scheduled Vehicle Agent.
bines the functionality of a scheduled transportation
agent and a vehicle. Instead of running on schedule,
the autonomous vehicle agent picks up a person on
demand, just like a taxi would. The answer of the au-
tonomous transportation vehicle agent to a transport
query (a, b) is a single transport option which covers
the whole route from a to b since the autonomous ve-
hicle is not bound to scheduled routes.
The Person Agent is a complex agent which com-
municates with transportation agencies and vehicles.
It plans and executes travel routes, either by using
public transport passively or by walking actively. The
implemented model is shown in Fig. 3. We see a hi-
erarchy of complex FSM behaviors. It shows that a
person operates in a loop of planning and executing
plans.
For the generation of plans (Planning behavior)
shortest paths have to be generated for walking, as
well as transportation agencies have to be contacted
for options. While the start and goal locations are
assumed to be on an arbitrary node in the map, not
all transportation requests can be satisfied by bus, so
that planning includes to pad vehicle usage with walks
to or from the stops of the vehicles. Once the plan
is fixed, it goes to execution (ExecutePlan behavior),
where each step of the plan will be executed sequen-
tially, either as an active (walking) or passive trans-
port. We see that passive transport has to be moni-
tored and can fail (e.g., by a timeout on the waiting
time), so that the planning behavior has to be rein-
voked on termination.
The Birth-Giver Agent initializes person agents
with several parameters like the start location, a cer-
tain budget in time and cost, as well as a target loca-
tion. All values are random numbers, drawn accord-
ing to a given probability distribution. Optionally,
the start and end location can be specified manually
by determining a fixed node. The realistic modeling
of the random process is crucial for the applicabil-
ity of the simulation outcome. The better the model
BEH: Init
2
3
Init done
Plan Generated
Plan Executed
Failure
b
Arrived at
Destination
2
BEH: Planning
FSMBehaviour
b
c
Acquire Options
Options Acquired
Plan
Generated
3
BEH: ExecutePlan
FSMBehaviour
b
4
d
Agent: All„Transport“Agents
Active
Passive
Success
Plan Executed
Success
Failure
Failure
4
BEH: PassiveTransport
FSMBehaviour
b
c
Success
Success
Failure
Agent: „Transport“ServiceAgent
Failure
Agent: Vehicle Agent
Perf: INFORM
2
SPS
SPS
1
BEH: PersonFSM
a
a
a
a
BEH: Planning
BEH: ExecutePlan BEH: Takedown
BEH: GeneratePlan
BEH: AcquireOptions
BEH: FSMEndPoint
BEH: ExecuteNextStep
BEH: ActiveTransport
BEH: PassiveTransport
BEH: SealTransportContract
BEH: FSMEndpoint
BEH: FSMEndpoint
BEH: TransportMonitoring
Figure 3: Person Agent.
the better its prediction. These data might be indi-
rectly inferred by information on where people live
and where they work, or by monitoring their current
use of vehicles. In reality, the choice of a transport
mode depends on several details, such as spatial dis-
tance or social-economic variables (Buehler, 2011).
In the end, a rather complex probability distribu-
tion for transport requests, humans and their queries
should be derived.
4 SHORTEST PATH SEARCH
Single-source shortest paths search with Dijkstra’s or
the A* algorithm (Dijkstra, 1959) was already present
in our MABS system, but showed performance prob-
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
326

lems and slowed down the overall MABS process
considerably. Therefore we engineered the imple-
mentation by using a memory-efficient joint repre-
sentation of graph and radix heap nodes. A joint
node representation includes a state label (unlabeled,
labeled or scanned), a linked list of edges, the ele-
ment for storing the distances, the radix bucket a node
is stored in as well as two pointers (pred, succ) for
linking the elements in the radix heap. An edge is
a pair of a successor node ID and according weight
(cost/distance). We observed that the joint node rep-
resentation is more crucial to the performance of the
search than the proper choice of the data structure.
One reason is to avoid memory allocation, another is
that efforts for maintaining handles to the nodes can
be avoided.
We also employed a key-based priority queue, ex-
ploiting the maximum weight C of all edges. A
radix heap (Ahuja et al., 1990) maintains an array
of dlg(C + 1)e + 1 buckets of sizes 1, 1, 2, 4, 8, 16,
etc. Elements in the buckets are doubly-linked. More
precisely, we maintain buckets b[0..B] and bounds
u[0..B + 1] with B = dlog(C + 1)e + 1 and u[B + 1] =
∞. The invariants of the algorithms are: 1) all keys in
b[i] are in [u[i], u[i + 1]], 2) u[1] = u[0]+ 1, and 3) for
all i ∈ {1, . . . , B − 1} we have 0 ≤ u[i + 1] − u[i] ≤
2
i−1
.
The main difference to one-level buckets (Dial,
1969) is to use buckets of exponentially increasing
sizes. Therefore, only O(lgC) buckets are needed. If
edge weights are integers or floating point numbers
O(lgC) can be interpreted as a constant independent
from the number of nodes n and edges m.
For shortest path search, in the presence of a lower
bound heuristic function h, A* (Hart et al., 1968) can
be applied. Without reopening, A* resorts to a variant
of Dijkstra’s algorithm with f (s) = h(s) for start node
s and new weight w
0
(u, v) = w(u, v) − h(u) + h(v) for
all edges (u, v).
Theorem 1 (Time Optimality Shortest Paths Explo-
ration). Given that the edge weights are computer
words (64-bit integer or floating-point numbers) and
provided a matching number representation for stor-
ing the accumulated distances at each node, our im-
plementation of the Single-Source Shortest Paths Al-
gorithm of Dijkstra (or A* with consistent heuristic)
has optimal linear time complexity.
Proof. The radix heap assumes that all edge costs in
the graph are integers bounded above by C. The re-
sult is that Dijkstra’s algorithm can be implemented
with a time complexity of O(m + n lgC), where n is
the number of nodes and m is the number of edges.
Given that the logarithm of a 64-bit integer is bounded
by a constant lgC = 64, the running time on a mod-
ern computer is linear O(m + n). If edge weights are
doubles, lgC = lg(1.79769 · 10
308
) = O(1)
Furthermore, the radix heap is significantly sim-
pler to implement compared to the Fibonacci heap
and similar data structures. The radix heap achieves
this time complexity by taking advantage of the prop-
erty that shortest path distances fall into a finite range
during the computation shortest paths by Dijkstra’s
algorithm.
The practical savings were considerable. Erst-
while unanalyzable systems turned out to be quickly
analyzable, and even a full Dijkstra exploration was
much faster than the original implementation of A*.
In smaller graphs (200,000 nodes, 2,000,000 edges),
generating the graph turned out to be more com-
plex (4,443 ms) than actually searching it (1,668 ms).
But even larger graphs (1,000,000 nodes, 10,000,000
edges) could be generated (30,574 ms) and searched
(34,631 ms) in adequate time.
Recall, that shortest path queries are frequently
posed by different agents such as persons and vehi-
cles; buses in a dynamic world may have to recom-
pute shortest paths from every bus station to the next
(based on dynamic changes to the road network due
to traffic jams). Frequent shortest path queries are
also needed for preprocessing the graph in order to
solve so-called vehicle routing problems. The deci-
sion making then relies on efficient solutions to the
Traveling Salesman Problem (TSP), a touchstone for
many general approaches in combinatorial optimiza-
tion: Genetic algorithms, simulated annealing, tabu
search, ant system, just to name a few. The prob-
lem is strong NP-hard and difficult to approximate
unless the triangular inequality holds ((Christofides,
1976); (Arora, 1998)). In an application of a forward-
ing agency, the TSPs are generated via shortest paths
reductions of route networks. Each order to be served
corresponds to one city in the TSP.
On the first glance, in case a better shortest path
search performance is needed, A* is an obvious alter-
native to Dijkstra’s algorithm. For a consistent heuris-
tic evaluation function, it is optimal efficient and (up
to tie-breaking) A* will expand the minimum number
of nodes. For a heuristic that is strictly more informed
than the trivial 0-heuristic applied in Dijkstra’s algo-
rithms, it is guaranteed to expand less nodes. How-
ever, at this level of speed per node, the number of
expanded nodes is not the only key performance mea-
sure. We experienced that the time needed for com-
puting the lower bound heuristic during shortest path
search can negatively influence the overall perfor-
mance. The computation of shortest paths of several
hundred TSP matrices based on the distance calcu-
lations according to the Haversine formula resulted in
EnhancedShortestPathComputationforMultiagent-basedIntermodalTransportPlanninginDynamicEnvironments
327

A* requiring 330s, while Dijkstra’s algorithm only re-
quired 274s. The net computing time for computing
all heuristic values took 207s, so that despite the sav-
ings in the number of node in A*, the heuristic itself
is too complex. Hence, computationally more sim-
pler heuristics are needed to beat Dijkstra’s algorithm.
Devising an efficiently computable consistent lower
bound heuristic is non-trivial, as approximations of
the heuristic are often inconsistent and thus sacrifies
optimality, or call more involved data structures.
As an alternative improvment to the search, bidi-
rectional shortest paths search can be executed. More-
over, there are many speed-up techniques that prepro-
cess the graph for a much better search time (Bast
et al., 2007). However, such off-line improvements
hardly translate to a dynamic scenario.
5 EXPERIMENTAL SETUP
In the context of a study on opportunities for novel
last-mile connectivity, in a preliminary case study we
looked at a MABS model for the Bangalore urban re-
gion, based on a user needs study (Akhilesh et al.,
2012) and the 2010 Traffic Management Plans for
Major Towns in Bangalore Metropolitan Region for
the Bangalore Metropolitan Region Development Au-
thority conducted by WilburSmith Associates.
To perform the simulation we extracted route data
from the OpenStreetMap. As Bangalore was not pre-
defined as a coherent district, we defined a bounding
box and included also streets that cross the bound-
aries instead of clipping them exactly at the border of
the bounding box. The road infrastructure contains
49,399 nodes and 134,222 edges and includes the In-
ternational Airport of Bangalore (BIAL).
The bus routes and associated information on
travel fares as well as fleet sizes is supplied by
the Bangalore Metropolitan Transport Corporation
(BMTC) authorities. They refer to real-life data. We
decided to focus on the last-mile connectivity of pas-
sengers at BIAL. The distribution of passenger trans-
ports measured for a particular week shows that there
are about 6,000 persons who use the bus lines on a
day. In comparison there are about 10,000 persons
taking a taxi (trips per day). Information on real-life
bus schedules as well as bus stops is added manually.
The simulated scenario models 8 bus lines, whose first
or last stop is the BIAL.
The implementation of agents for the initial study
is fully operational. In our scenario, a first birth-giver
agent is responsible for creating person agents that act
for persons located in the inner city district. The de-
sire of this persons is to arrive the airport as soon as
Figure 4: Running simulation with busses, persons, rick-
shaws and bikes.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
1
10
100
1.000
10.000
100.000
Boarding Debarking
Number of Bus Stop (in Alphabetic Order)
Number of Passengers
Figure 5: Simulation results. The open bars show the num-
ber of boarding and the closed bars the number of debarking
passengers at each bus stop within an whole week. The bus
stops are numbered consecutively to their official name in
alphabetic order.
possible. Person agents that are created by a second
birth-giver agent represent individuals whose desire it
is to get from the airport to the inner city district. Fi-
nally, a third birth-giver agent generates a fixed num-
ber of rickshaws which start at the airport and also
drive to the inner city district.
To generate the start and end location randomly,
we implemented a random walk strategy starting at
a bus stop to generate requests at certain nodes with
an arbitrary distance. Therefore we ensure that trans-
port requests are not far from the encoded bus sta-
tions. Simulating dynamically changing traffic con-
ditions is the subject of further research. As a result,
edge following is mainly determined by the speed of
the human or the vehicle as well as the type of the
road.
Moreover, we added bikes, so that persons have
the flexibility to decide how to get to the bus stop or
home: if the distance is close enough (smaller than
some predefined threshold) they walk, otherwise they
ride by bike (see Fig. 4). The maximum walking
speed of a person is limited to 5 km/h while the max-
imum speed of a bike is limited to 30 km/h. We sim-
ulated a time span of a whole week.
For our sample scenario we are interested in the
number of passengers at each bus stop (see Fig. 5).
No. 2 is the BIAL and, therefore, either the place of
arrival or departure of each person. Low traffic is pri-
marily caused by a high density of bus stops within
a certain district. In total we simulated more than
45,000 agents with up to 1,100 agents running con-
currently.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
328

Performance indicators recorded in different sim-
ulations can easily be combined (e.g., averaged val-
ues). Besides the number of passengers that board or
debark a bus, there are a lot of other interesting per-
formance indicators for the simulation like the time
spend by persons to reach their destination, the bud-
get needed for the travel, or a combination of both.
Experiments have shown that the bottleneck of the
computations is computing several shortest paths on
the routing graph by each person agent. Buses do
not change their routes if there is no occurrence of
unexpected events. As a consequence, the computa-
tion time of the buses are minimized by the use of an
cache.
6 CONCLUSIONS
AND OUTLOOK
This paper reported on the current status of a fine-
grained MABS model for urban mobility in Banga-
lore. The physical simulation world model builds
upon detailed OpenStreetMap data for the basic traf-
fic infrastructure. It allows the mapping of the exten-
sive network of bus lines operated by the BMTC. The
generation of individuals that utilize modeled trans-
port modalities can be configured according to actual
distributions. Besides agent models for transport op-
erators such as the BMTC and independent operators
(using, for instance, taxis and rickshaws), a particu-
lar focus was put on the rational modeling of trans-
port customers. These are equipped with capabilities
for interleaved planning and execution of intermodal
transport schedules. Experiments have shown that our
system handles a hand-modeled excerpt of BMTC bus
lines connecting airport and city center with a real-
istic number of more than 6,000 passengers per day
in a time frame which make extensive experimenta-
tion practical in spite of complex planning and route-
finding calculations performed by the simulation ac-
tors. The challenges to be addressed in ongoing multi-
disciplinary research on smart mobility in metropoli-
tan areas are manifold. The results of this research
(e.g. optimized utilization of existing traffic systems
or new emergency strategies) can be compared and
evaluated by using a MABS model like the one we
introduced in this paper.
ACKNOWLEDGEMENTS
The presented research was partially funded by
the BMBF within the acatech project GRIP IT
(F
¨
orderkennzeichen 01/S09048) and the German Re-
search Foundation (DFG) within the Collaborative
Research Centre 637 ”Autonomous Cooperating Lo-
gistic Processes: A Paradigm Shift and its Limita-
tions” (SFB 637) at the University of Bremen, Ger-
many.
REFERENCES
Ahuja, R. K., Mehlhorn, K., Orlin, J. B., and Tarjan, R. E.
(1990). Faster Algorithms for the Shortest Path Prob-
lem. Journal of the ACM, 37(2):213–223.
Akhilesh, K. B., Sitharam, T. G., Goswami, M., and Man-
jula, D. (2012). User Needs Study: Living Lab on
Bangalore Mobility and ICT Research for Smart City
Solutions. Technical report, CiSTUP.
Arora, S. (1998). Polynomial time approximation schemes
for euclidian traveling salesman and other geometric
problems. Journal of the ACM, 45(5):753–782.
Bast, H., Funke, S., Sanders, P., and Schultes, D. (2007).
Fast Routing in Road Networks with Transit Nodes.
Science, 316(5824):566–566.
Bellifemine, F., Caire, G., and Greenwood, D. (2007). De-
veloping Multi-Agent Systems with JADE, volume 5.
Wiley.
Buehler, R. (2011). Determinants of transport mode choice:
a comparison of germany and the usa. Journal of
Transport Geography, 19(4):644 – 657.
Chen, B. and Cheng, H. H. (2010). A review of the appli-
cations of agent technology in traffic and transporta-
tion systems. IEEE Transactions On Intelligent Trans-
portation Systems, 11(2):485 –497.
Christofides, N. (1976). Worst-case analysis of a new
heuristic for the travelling salesman problem. Tech-
nical Report 388, Graduate School of Industrial Ad-
ministration, Carnegie-Mellon University.
Dial, R. B. (1969). Shortest-path forest with topological
ordering. Comm. of the ACM, 12(11):632–633.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1(1):269–
271.
Gehrke, J. D., Schuldt, A., and Werner, S. (2008). Quality
Criteria for Multiagent-Based Simulations with Con-
servative Synchronisation. In 13th ASIM Dedicated
Conference on Simulation in Production and Logistics
(ASIM), pages 177–186.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A formal
basis for the heuristic determination of minimum cost
paths. IEEE Transactions on Systems, Science, and
Cybernetics, SSC-4(2).
Hoogendoorn, S. P. and Bovy, P. H. L. (2001). State-of-the-
art of vehicular traffic flow modelling. Institution of
Mechanical Engineers, Part I: Journal of Systems and
Control Engineering, 215(4):283–303.
Kl
¨
ugl, F. and Rindsf
¨
user, G. (2011). Agent-based route (and
mode) choice simulation in real-world networks. In
IAT, pages 22–29.
Macal, C. M. and North, M. J. (2010). Tutorial on agent-
based modelling and simulation. Operational Re-
search Society, 4:151 – 152.
Meignan, D., Simonin, O., and Koukam, A. (2006). Multi-
agent approach for simulation and evaluation of urban
bus networks. In AAMAS’06, pages 50–56.
EnhancedShortestPathComputationforMultiagent-basedIntermodalTransportPlanninginDynamicEnvironments
329
