
Tracking Subpixel Targets with Critically Sampled Optics
James Lotspeich and Mathias Klsch
Department of Computer Science, Naval Postgraduate School, 1 University Way, Monterey, CA, U.S.A.
Keywords:
Subpixel, Maximum a Posterior, Tracking, Viterbi, Distance Transform, Pixel Matched Filter, Template
Matching.
Abstract:
In many remote sensing applications, the area of a scene sensed by a single pixel can often be measured
in squared meters. This means that many objects of interest in a scene are smaller than a single pixel in
the resulting image. Current tracking methods rely on robust object detection using multi-pixel features.
A subpixel object does not provide enough information for these methods to work. This paper presents a
method for tracking subpixel objects in image sequences captured from a stationary sensor that is critically
sampled. Using template matching, we make a Maximum a Posteriori estimate of the target state over a
sequence of images. A distance transform is used to calculate the motion prior in linear time, dramatically
decreasing computation requirements. We compare the results of this method to a track-before-detect particle
filter designed for tracking small, low contrast objects using both synthetic and real-world imagery. Results
show our method produces more accurate state estimates and higher detection rates than the current state of
the art methods at signal-to-noise ratios as low as 3dB.
1 PROBLEM DESCRIPTION
A subpixel target is one whose physical dimensions
are smaller than the spatial resolution of the sensor.
This definition assumes that the sensor is diffraction
limited with pixel size determined by the Nyquist
Rate. This critical value is commonly used in tele-
scope and satellite optical sensor design to ensure
proper sampling of the point spread function (PSF)
of the sensor, which acts as a band-limited spatial fil-
ter. A lens that meets this criterion is referred to as
critically sampled (Gonzalez and Woods, 2007).
The PSF of the optical system is a function of
light intensity based on the diffraction of light waves
as they pass through an aperture that acts as a spa-
tial filter on an image, and results in blurring of target
intensity over more than one pixel (DeCusatis et al.,
2010). A staring sensor has no ego-motion relative to
the scene, therefore any localized intensity changes in
the scene are due to motion of objects in the scene,
or noise in the sensor. To track the target over suc-
cessive images, referred to as frames, we model the
target’s motion and sensor’s output for a given target
state.
This paper is organized as follows: in section 2,
we discuss previous work in the fields of subpixel tar-
get detection, and very dim object tracking. Section 3
describes target, sensor and motion models, as well as
defines our method for tracking subpixel targets, the
Pixel Matched Viterbi (PMV) algorithm. Section 4
discusses experiments performed to test PMV in both
synthetically generated and real-world data. Finally,
section 5 examines the strengths and weaknesses of
our method as well as provides suggestions for future
work.
2 PRIOR WORK
A subpixel target is one whose physical dimensions
are smaller than the spatial resolution of the sensor.
The total contribution of an object to the final inten-
sity of the pixel is based on the PSF of the sensor,
h(·), the intensity of the target, α, measured in photon
flux, and the total intensity of all background objects
within a pixel’s field of view. To track the target, it is
necessary to identify which pixel contains the target,
and estimate where the target is located within that
pixel.
Samson, et al. addresses the detection of subpixel
targets in a fixed scene (Samson et al., 2004). It pro-
vides a method to detect subpixel point targets using
the sensor’s PSF as an identifying characteristic. Us-
ing matched filtering theory, a measure is defined to
375
Lotspeich J. and Kolsch M. (2013).
Tracking Subpixel Targets with Critically Sampled Optics.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 375-381
DOI: 10.5220/0004263903750381
Copyright
c
SciTePress

determine the likelihood that a given pixel in an im-
age contains a subpixel object. This measure is used
to perform a detection decision by applying a thresh-
old to the likelihood values. The Neyman-Pearson
criterion to is used to determine the optimal thresh-
old value for a given false positive rate. The resulting
detector is shown to be greater than 70% accurate for
images with SNR=14dB.
The primary contribution of Samson, et al. is the
Generalized Pixel-Matched Filter (GPMF). This fil-
ter calculates the maximum likelihood estimate of the
unknown target photon flux, α, and returns the mini-
mum sum of squared error estimate for the template
centered at each pixel in an image. The GPMF is cal-
culated as:
`(z
(x,y)
) =
(s
ε
0
)
T
R
−1
k(z
(x,y)
)
2
(s
ε
0
)
T
R
−1
s
ε
0
(1)
The variable s
ε
0
is a 9 ×1 vector representation of a
3 ×3 pixel template. This template is generated by
calculating the ensquared energy of the PSF for each
pixel assuming a target with photon flux α is located
in the center of the template. The variable R repre-
sents the sensor’s noise covariance matrix, and k(·) is
a function that returns a 9 ×1 vector representation of
the 3 ×3 pixel patch with center pixel of (x,y) in the
observation z. Since the sensor noise is assumed inde-
pendent and identically distributed (IID), R becomes
I
9
r where I
n
denotes an identity matrix with diagonal
of size n.
The GPMF provides the likelihood that a subpixel
target exists in any given pixel. It does not provide an
estimate of the subpixel location of that target. Since
GPMF assumes a template with the target located in
the center of a pixel, objects offset from the center
will produce a lower overall likelihood. In order to
calculate the likelihood of a pixel in any subpixel po-
sition, Samson, et al. propose an Approximate Likeli-
hood Ratio Test (ALRT) that uses the trapezoidal rule
to approximate the integral:
L(x,y) =
0.5
ˆ
−0.5
0.5
ˆ
−0.5
1
(s
(i, j)
R
−1
s
(i, j)
)
0.5
exp(`(x,y))did j
(2)
While the ALRT method provides a measure of
pixel-wise likelihood, it does not provide an estimate
of subpixel location. To determine subpixel location,
a second Maximum Likelihood (ML) estimate must
be performed for each pixel likelihood exceeding the
specified threshold. If a large number of pixels fall
above the threshold limit, this will result in a high
computational load. Additionally the subpixel posi-
tion estimate does not incorporate any prior location
probabilities or data from multiple observations over
time. In order to use this method for tracking, it is
necessary to specify a tracking method that can use
detections provided by the ALRT method.
While not specifically focused on subpixel track-
ing, Track Before Detect (TBD) filters attempt to
track very low signal-to-noise ratio (SNR) targets
through a sequence of images. Since the total pho-
ton flux generated by a subpixel target is very small
relative to the overall sensor size, these targets gener-
ally exhibit a very low SNR. Additionally, TBD filters
focus on very small targets down to, but not smaller
than, a single pixel and typically incorporate the PSF
in their detection methods(Ristic et al., 2004; Rutten
et al., 2005a).
The TBD filter attempts to track a target using
multiple detection probabilities over time rather than
tracking detections above a given threshold. This al-
lows the filter to integrate motion information over
time with multiple detection likelihoods in order to
build a better estimate of a target’s location. Since
the sensor model is non-linear, TBD methods use a
particle filter algorithm to perform estimation (Rut-
ten et al., 2005b). Theoretical lower bound perfor-
mance of these filters indicate the ability to perform
with subpixel accuracy, however, while many applica-
tions achieve subpixel estimation accuracy, most ap-
plications in the literature fail to achieve the lower
bound performance (Morelande and Ristic, 2009;
Ristic et al., 2004). Since TBD filters use particle fil-
ter methods, they tend to be relatively fast, with com-
putation time proportional to the number of particles
used. The number of particles, however, also relates
directly to the ability of the filter to converge on the
correct estimate. As the number of dimensions or the
size of the domain for any dimension increases, the
number of particles required increases (Arulampalam
et al., 2001).
The drawback of using TBD methods is that the
filter performance degrades rapidly as the SNR falls
below 7dB. As demonstrated by Rutten, et al. (Rutten
et al., 2005b), the TBD method produces root mean
squared (RMS) position error of no less than 1 pix-
els at 6dB, and no less than 3 pixels at 3dB. In con-
trast, the Cramer-Rao lower bound (CRLB) predicts
the theoretical performance of the estimator to be bet-
ter than 10
−1
pixels at 4dB (Morelande and Ristic,
2009). While TBD methods perform close to the the
lower bound above 7dB, their performance suffers be-
low this level.
The PMV method presented here uses the Maxi-
mum A Posteriori (MAP) formulation of the target’s
state through a Hidden Markov Model (HMM) as the
basis of estimation. As opposed to ML estimation
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
376

used in TBD methods, the MAP estimator calculates
the maximum probability path through a HMM given
all observations from time 1. ..t. This allows full uti-
lization of all data regarding the target rather than per-
forming an estimate for each time step based only on
the previous estimation and current observation. For a
large number of observations, we expect the ML and
MAP to converge on the final position estimate, but
the ML solution will usually contain higher error in
its earlier estimates since those were made using only
the data up to that time step. A smoothed ML esti-
mate may provide reduced error for earlier estimates
relative to the ML solution, however, it is necessary
to determine a smoothing distribution. While this is
possible, as demonstrated by Junkun, et al. in (Junkun
et al., 2011), the final results are still well above the
expected CRLB.
3 METHODOLOGY
The PMV algorithm estimates the MAP of the path of
a subpixel object in three iterative steps:
1. Calculate the target’s current state likelihood
given the current observation
2. Calculate the probability of a state transition from
the previous time step to the current for each pos-
sible target state
3. For each possible target state, select the maximum
sum of the likelihood and state transition
3.1 Sensor Model
The sensor is assumed to consist of a discrete
grid of square sensing elements, such as a Charge-
coupled Device (CCD) or Complimentary Metal-
oxide-semiconductor (CMOS) device. Furthermore
we assume that the sensor is monochromatic, with
each sensing element reporting the local photon flux
detected during a fixed integration interval. Addition-
ally, the sensor is assumed to be critically sampled.
The width of the PSF is 1.22λN, where λ represents
the average of the sensor’s frequency range, and N is
the ratio of aperture diameter to focal length. By the
Rayleigh Criterion, the maximum spatial frequency
that can be sensed is equal to the width of the PSF
(DeCusatis et al., 2010). According to the Nyquist
sampling theorem, the optimal sampling frequency
for the PSF is
1
/2.44λN. By setting the size of the sen-
sor photo site to this optimal sampling value, the sen-
sor is critically sampled. It is common practice to de-
sign satellite and optical sensors for remote sensing
applications using this criteria (Olsen, 2007).
(
−1
/4,
−1
/4) (0,
−1
/4) (
1
/4,
−1
/4)
(
−1
/4, 0) (0,0) (
1
/4, 0)
(
−1
/4,
1
/4) (0,
1
/4) (
1
/4,
1
/4)
Figure 1: Templates generated by a subpixel target at
(
−1
/4,
−1
/4),. .., (
1
/4,
1
/4). The dot indicates the actual tar-
get position for each template.
An observation from the sensor consists of four
elements: the effect of the sensor’s PSF on the scene,
the contribution of the target, the background, and
sensor noise. These contributions are represented
mathematically as
z = h ⊗( f (x) + B) + ω (3)
where h denotes the PSF of the optical system, ⊗ is
the convolution operator, f (x) is a function of target
intensity over the scene given a target located at posi-
tion x, B is a static function of the background scene
intensity, and ω ∼ N (0,r) is IID for each pixel. Us-
ing the distributive property of convolution, eq 3 is
rewritten
z = h ⊗ f (x) + h ⊗B + ω (4)
Eq 4 separates the background contribution from the
target contribution without the need to deconvolve the
image first. This makes it possible to remove the
background contribution from the scene using only
estimates of the background determined from the ob-
servation frames. We use the median function to per-
form background subtraction,
ˆ
B = median(h ⊗B
1...t
).
As determined in (Lotspeich, 2012), this provides ad-
equate subtraction for the PMV algorithm relative to
other popular methods such as Mixture of Gaussians.
The background subtracted observation is denoted
¯z = z −
ˆ
B (5)
Using ¯z, we formulate a likelihood measure. Due
to the PSF, the target signal will spread onto neighbor-
ing pixels. This additional information can be used to
estimate the subpixel location of the target by com-
paring the expected intensity values of a pixel and its
neighbors with the observed values. Figure 1 shows
TrackingSubpixelTargetswithCriticallySampledOptics
377

the ensquared energy of the PSF over a 3 ×3 pixel
template for different subpixel positions. The ad-
ditional information provided in neighboring pixels
makes it possible to use an optimal template matched
filter on the image to determine the matching error be-
tween a template and the 3 ×3 pixel patch centered at
a given pixel. We use the GPMF developed by Sam-
son, et al. as the matched filter. To determine the
likelihood for each subpixel location, we generate a
set of templates, S, with each template, s
ε
∈ S, rep-
resenting a target located at a discrete subpixel point
in the central pixel of the template. The central pixel
is divided into ρ ×ρ subpixel locations such that ε ∈
{(i, j)|i, j ∈
−1
/2,
−1
/2 +
1
/ρ,
−1
/2 +
2
/ρ,.. .,
−1
/2 +
ρ−1
/ρ}.
The likelihood density for each discrete subpixel lo-
cation in the image is calculated for each pixel, ¯z
(x,y)
,
in the image.
`(¯z
(x,y)
|X) =
(s
ε
)
T
R
−1
k(¯z
(x,y)
)
2
(s
ε
)
T
R
−1
s
ε
(6)
3.2 Motion Model
The results presented in this paper assume a constant
velocity target motion with additive Gaussian noise
as described by Bar-Shalom in (Bar-Shalom et al.,
2001). The Nearly Constant Velocity (NCV) model
assumes that a target is moving at a fixed velocity
with noisy, zero mean acceleration. The state for this
model consists of position and velocity in the x and
y dimensions. To avoid ambiguity between position
and an instance of the random variable X, the state
values are denoted using i and j instead.
X =
i ∆i j ∆ j
T
(7)
The state update equation is given as:
x
k
= Ax
k−1
+ η (8)
With a linear transition matrix
A =
1 1 0 0
0 1 0 0
0 0 1 1
0 0 0 1
(9)
The noise, η, is additive Gaussian with covariance
matrix Q.
η ∼ N (0,Q) (10)
Q =
q
3
∆k
3
q
2
∆k
2
0 0
q
2
∆k
2
q∆k 0 0
0 0
q
3
∆k
3
q
2
∆k
2
0 0
q
2
∆k
2
q∆k
(11)
Q represents the covariance matrix of the NCV
noise. The variable q = 0.01 is used in all tests de-
scribed in section 4. The variable ∆k represents the
time increment between frames and is set to 1 for all
experiments.
Since η is a Gaussian, the motion probability for
this model is:
p(X
t
|X
t−1
) = (2π)
−2
|Q|
−
1
2
exp
−
1
2
(X
k
−AX
k−1
)
T
Q
−1
(X
k
−AX
k−1
)
(12)
3.3 Calculating MAP
Using sensor model likelihood in eq 6 and motion
probability in eq 12, the MAP is calculated as
MAP(X
1...t
) = p(X
0
)
t
∏
k=1
argmax
X
k
`(¯z
k
|X
k
)p(X
k
|X
k−1
)
(13)
The naive implementation of this calculation requires
O(n
t
) time where n = ρ
2
wh, when each frame has size
w ×h. This implementation quickly becomes compu-
tationally intensive for more than a few frames. Since
the number of possible states has been discretized, the
Viterbi algorithm can be used to optimally calculate
the MAP in O(tn
2
) time (Viterbi, 1967).
The Viterbi algorithm is a dynamic programming
method that calculates the optimal path through an
acyclic directional graph given node and edge costs.
The HMM representing each possible discrete target
state can be viewed as an acyclic directional graph
where each state at time t connects to each state at
time t + 1. The node value for each state is calcu-
lated using eq 13, and edge weights from t to t + 1 are
calculated using eq 12. The Viterbi algorithm calcu-
lates the MAP of the states by selecting the maximum
inbound edge for each successive set of states. The
states’ weights are then updated by multiplying the
weight of the inbound edge with the current state like-
lihood. Outbound edges are calculated as the prod-
uct of the motion model probability and the node
weight. The maximum probability node in the last
time sequence represents the final node of the MAP
sequence. A simple backtracking step follows the
maximum inbound edge for each node, providing the
final sequence of states in the MAP.
3.3.1 Distance Transform
Assuming the noise in eq 12 is additive Gaussian
noise, we can use the distance transform (DT) al-
gorithm developed by Felzenswalb and Huttenlocher
(Felzenszwalb and Huttenlocher, 2004) to further re-
duce the computation time from O(tn
2
) to O(tn).
The DT algorithm calculates the surface described
by the maximum value of a set of functions S =
{f
1
(x), f
2
(x),..., f
n
(x)} over each value of x.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
378
The distance transform algorithm calculates the
maximum or minimum manifold of a set of parabolic
or conic functions over a given domain. The set of
functions consists of tuples (h,k), where each tuple
represents a parabola in the form
f (x) = a(x −h)
2
+ k (14)
The variable a determines the size and direction of the
parabola. To apply the distance transform algorithm,
the value of a must be constant over all parabolas in
the set.
The distance transform algorithm only works in
one dimension, however, since Q is separable (i.e.
it can be expressed as the outer product of two vec-
tors, v and h), it is possible to run the distance trans-
form once for each dimension of the state - in this
case the i and j axis of the target position. Since
the probability of a target state can be expressed as
f (x) = log(p(X
k
|X
k−1
)) + log(`(¯z
k
|X
k
)), f (x) repre-
sents the Gaussian distribution of the target’s state at
time k given that X
k
= (i, j). Since f (x) is Gaussian,
it is separable. Substituting X
k
= (i, j) into the motion
model in eq 12 and the likelihood in eq 6, separating
the Gaussian distribution into the marginal distribu-
tions for i and j locations and simplifying yields:
f (i) =
−1
2σ
2
1
(i −µ
1
)
2
+ log(p(
ˆ
X)) + log
1
q
2πσ
2
1
(15)
f ( j) =
−1
2σ
2
3
( j −µ
3
)
2
+ log(p(
ˆ
X)) + log
1
q
2πσ
2
3
(16)
with [
µ
1
µ
2
µ
3
µ
4
]
T
= Ax
k−1
, σ
d
= Q
dd
, for
each dimension d ∈ {1, 3}. The DT algorithm is per-
formed for the set of functions over the i and j dimen-
sions. The resulting surface is the MAP estimate of
target states for the time step k.
4 RESULTS
To test the performance of the proposed method, we
estimated the target path over a series of simulated
image sequences at various SNR values from 1dB to
20dB. The SNR is calculated as
SNR = 20 log
α
σ
(17)
The estimated paths were then compared with the
known target path to determine the RMS distance er-
ror in pixels. The TBD filter described by Ristic, et
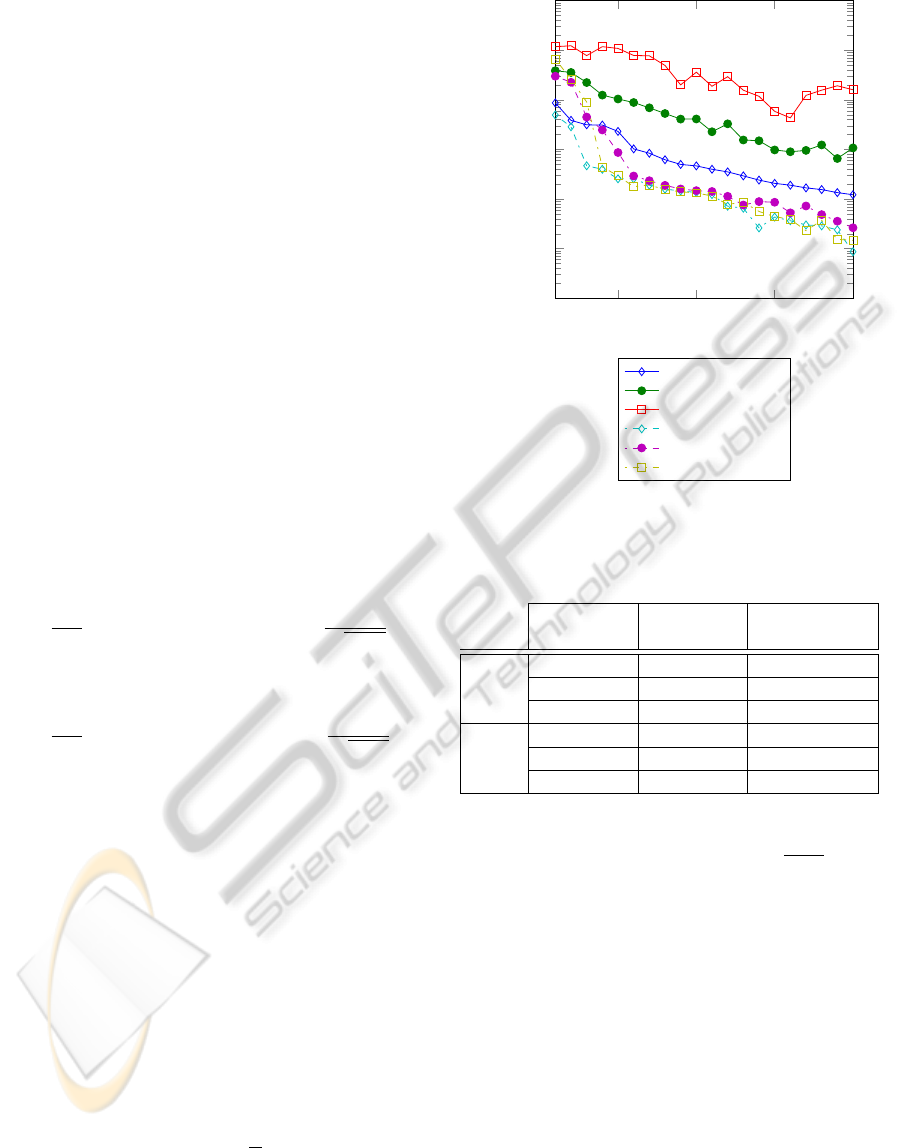
5
10
15
20
10
−3
10
−2
10
−1
10
0
10
1
10
2
10
3
SNR (dB)
Mean Estimation Error (pixels)
TBD 30x30 RMS-TP
TBD 85x85 RMS-TP
TBD 200x200 RMS-TP
PMV 30x30 RMS-TP
PMV 85x85 RMS-TP
PMV 200x200 RMS-TP
Figure 2: Average RMS over 20 runs for SNR of 1-20dB
for TBD and PMV.
Table 1: Run times for PMV and TBD for synthetic data
sets. Mean run times are reported over 20 separate tests.
Image
Size
Mean Run
Time (s)
Std of Run
Time (s)
PMV
30x30 17.9897 2.4852
85x85 58.3830 1.7788
200x200 403.7682 8.3409
TBD
30x30 1.2973 0.0488
85x85 1.9445 0.0711
200x200 6.3925 0.6091
al. was run on the same data set with 10000 particles,
with p(birth)= 0.05, p(death)= 0.05, and ∆x = ∆y =
1. The PSF width, Σ, was set to 1.22/2
√
2ln2, which
matches the PSF width of a critically sampled system
with λN = 1. The detection threshold for TBD is set
to 0.7. This means that the target is considered de-
tected if greater than 70% of the particles are in the
“continuation” chain of the jump Markov model.
The TBD and PMV filters were each run 20 times
on synthetic imagery from 1dB to 20dB, and the RMS
distance error was calculated for each estimated path.
In the case of the TBD filter, distance error is only cal-
culated for those points of the path that exceed the de-
tection threshold. To measure the computational time
for each filter, images of size 30 ×30, 85 ×85, and
200 ×200 where tested. Figure 2 shows the average
RMS over 20 runs for each SNR value, and table 1
shows the running time for both algorithms on the dif-
ferent data sets.
TrackingSubpixelTargetswithCriticallySampledOptics
379

0 10 20 30
12
12.5
13
13.5
14
PMV
TBD
Figure 3: Close-up of the PMV estimated path and TBD
estimated path in the real-world data set.
Using the mean RMS, PMV outperforms TBD
in every data set for SNRs greater than or equal to
4dB. At SNR values from 1 to 4dB, the methods are
relatively comparable, however, both methods fail to
achieve subpixel estimation error. Defining detection
rate as the number of estimated points that fall within
a 1 pixel distance of the ground truth, PMV achieves
greater than 80% detection rate for SNR of 3dB and
greater, with TBD producing greater than 80% at 7dB
for 30x30 images, and 12dB for 85x85. TBD fails to
achieve greater than 80% for the 200x200 data set at
any tested SNR. In relation to TBD, which is depen-
dent on image size, PMV does not appear to reduce
quality with image size. However, as expected, the
linear growth of PMV with respect to the number of
pixels results in much larger computation time.
To validate PMVs performance against real-world
data, we captured video of a 14mm diameter LED
emitting at the 3µm light frequency, mounted on a
robot platform moving at a constant 0.4m/s speed
from a distance of 97m using a FLIR 8200 mid-
wave infrared (MWIR) camera with 50mm lens and
f/4 aperture setting. The camera’s PSF is calculated
to have a full width at half-maximum (FWHM) of
16.448µm on a sensor with pixel pitch of 18µm. The
spectral range of the camera is 3 −5µm wavelength
frequencies. This results in a pixel sampling rate
of r
c
= 1.36, and a Nyquist sampling distance of
1
/1.36·4µm·4. This means the camera is under sampled
for the PSF size, however, since the full width of the
spot is greater than the pixel pitch, the target intensity
is still spread to more than one pixel. To avoid adding
multiple targets to the image, the final sequence of
images was cropped to remove the robot from the test
imagery. The real-world image sequence consists of
126 frames of 59 ×14 sized images.
Figure 3 shows the estimated paths for PMV and
TBD. The breaks in the TBD-estimated path are due
to the filter falling below the 0.7 threshold value dur-
ing portions of the sequence. Due to the difficulty in
determining the transformations necessary to convert
real-world target coordinates to camera coordinates,
ground truth target location is not known. Instead, the
resulting paths are overlaid on the actual image se-
quence as seen in figure 4.
The smoothness of the PMV estimate is due to the
use of the entire path in estimation. Low probability
estimates at the beginning of the sequence may still
be included in the final solution. For TBD, on the
other hand, there is no mechanism for keeping track
of prior path estimates when the filter has not con-
verged. The estimate tends to have high variance at
first, with the variance diminishing as further obser-
vations are made. As a consequence of this behav-
ior, estimates made prior to convergence will result in
larger error. Additionally, the TBD population of par-
ticles have a minimum variance after convergence that
results in a shifting mean. While the mean stays close
to the actual target location, the fluctuation produces
poorer results than the PMV estimate.
While the low noise characteristics of the sensor
used to the capture the real-world data set preclude
testing at lower SNR values, the observed results are
consistent with the predicted results from the syn-
thetic data set. At a peak SNR of ˜20dB, both methods
are expected to produce subpixel position estimates
with PMV providing a lower RMS error. As seen
in figure 3, the paths produced by each method are
very close to each other, with the smoother path of
the PMV more closely matching the actual motion of
the target.
5 CONCLUSIONS
While the results show that PMV performs better than
the TBD method, they also indicate areas for further
research. For example, the computational require-
ments of PMV precludes its use in real-time imagery.
A number of techniques may reduce overall process-
ing time without reducing estimation quality. For ex-
ample, adaptively adjusting the value of ρ based on
likelihood values has the potential to reduce the to-
tal number of states considered by the Viterbi algo-
rithm. Also, alternative Viterbi solution methods such
as Lazy (Feldman et al., 2002), A-Star (Klein and
Manning, 2002), or Tree Viterbi (Nelson and Rou-
farshbaf, 2009) have all been shown to increase the
speed of the Viterbi algorithm by evaluating fewer
states than the proposed method. While initial exper-
iments show the distance transform providing supe-
rior results, this conclusion has not been thoroughly
tested.
Another possible improvement is the development
of a likelihood function for color optical sensors. The
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
380

Figure 4: Three frames for the real-world dataset. The top row shows the PMV estimated path up to the current frame for
frames 47, 87, and 126 with a rectangle placed at the current estimated location. The bottom row shows the TBD estimated
path up to the current frame for frames 47, 87, and 126. A rectangle is placed over the current estimate if TBD has passed the
detection threshold for the frame (frames 47 and 126 do not have rectangles because TBD has fewer than 70% of particles
tracking the target. Picture intensity in these images is adjusted to highlight the target.
use of a color filter over different pixels of an opti-
cal sensor, or a prism in the case of 3 CCD cameras
results in different PSFs for each pixel of the image.
While this complicates the likelihood function, it may
also provide another indicator of target location. Ad-
ditionally, since the width of the PSF is dependent on
the wavelength of light, different color filters will pro-
vide more or less information in neighboring pixels.
By matching the likelihood function to the sensor in
use, it may be possible to increase accuracy of PMV.
This paper has demonstrated a method for track-
ing the path of subpixel objects in image sequences
captured by a critically sampled optical sensor. A
likelihood method is developed using a pixel matched
optimal filter. The problem is formulated using the
MAP solution for HMMs, and the motion model is
mapped to a distance transform problem that reduces
the overall complexity from O(tn
2
) to O(tn). We
compared the performance of PMV to a current state
of the art method and show that our method outper-
forms TBD in all data sets used. Finally, we provide
real-world validation of the results observed for the
synthetic data set. To the best of our knowledge, PMV
is the first subpixel target tracking method proposed in
the literature.
REFERENCES
Arulampalam, S., Maskell, S., Gordon, N., and Clapp, T.
(2001). A tutorial on particle filters for on-line non-
linear/non-Gaussian Bayesian tracking. IEEE Trans-
actions on Signal Processing, 50:174–188.
Bar-Shalom, Y., Li, X. R., and Kirubarajan, T. (2001). Esti-
mation with Applications to Tracking and Navigation.
John Wiley & Sons, Inc., New York, NY, USA.
DeCusatis, C., Enoch, J., Lakshminarayana, V., Li, G.,
MacDonald, C., Mahajan, V., and Stryland, E. V.
(2010). Handbook of Optics, volume 4. McGraw Hill,
3 edition.
Feldman, J., Abou-Faycal, I., and Frigo, M. (2002). A
fast maximum-likelihood decoder for convolutional
codes. In Vehicular Technology Conference, 2002.
Proceedings. VTC 2002-Fall. 2002 IEEE 56th, vol-
ume 1, pages 371 – 375 vol.1.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2004). Dis-
tance transforms of sampled functions. Technical re-
port, Cornell Computing and Information Science.
Gonzalez, R. C. and Woods, R. E. (2007). Digital Image
Processing (3rd Edition). Prentice Hall, 3 edition.
Junkun, Y., Hongwei, L., Xu, W., and Zheng, B. (2011).
A track-before-detect algorithm based on particle
smoothing. In Radar (Radar), 2011 IEEE CIE Inter-
national Conference on, volume 1, pages 422 –425.
Klein, D. and Manning, C. D. (2002). A* parsing: Fast
exact Viterbi parse selection. Technical Report 2002-
16, Stanford InfoLab.
Lotspeich, J. (2012). Tracking Subpixel Targets With Crit-
ically Sampled Optical Sensors. PhD thesis, Naval
Postgradute School, Monterey, CA.
Morelande, M. and Ristic, B. (2009). Signal-to-noise ratio
threshold effect in track before detect. Radar, Sonar
Navigation, IET, 3(6):601 –608.
Nelson, J. and Roufarshbaf, H. (2009). A tree search ap-
proach to target tracking in clutter. In Information
Fusion, 2009. FUSION ’09. 12th International Con-
ference on, pages 834 –841.
Olsen, R. (2007). Remote Sensing from Air and Space. The
International Society for Optical Engineering, Mon-
terey, CA.
Ristic, B., Arumluampalam, S., and Gordon, N. (2004). Be-
yond the Kalman Filter-Particle Filters for Tracking
Applications. Artech House, Boston, MA.
Rutten, M., Gordon, N., and Maskell, S. (2005a). Recur-
sive track-before-detect with target amplitude fluctua-
tions. Radar, Sonar and Navigation, IEE Proceedings
-, 152(5):345 – 352.
Rutten, M., Ristic, B., and Gordon, N. (2005b). A compari-
son of particle filters for recursive track-before-detect.
In Information Fusion, 2005 8th International Confer-
ence on, volume 1, page 7 pp.
Samson, V., Champagnat, F., and Giovannelli, J.-F. (2004).
Point target detection and subpixel position estimation
in optical imagery. Applied Optics, 43(2):257–263.
Viterbi, A. (1967). Error bounds for convolutional codes
and an asymptotically optimum decoding algorithm.
Information Theory, IEEE Transactions on, 13(2):260
–269.
TrackingSubpixelTargetswithCriticallySampledOptics
381
