
A Combined SVM/HCRF Model for Activity Recognition based
on STIPs Trajectories
Mouna Selmi, Mounim A. El-Yacoubi and Bernadette Dorizzi
Institut Mines-Telecom / Telecom SudPari, Evry, France
Keywords: Human Activity Recognition, Hidden Conditional Random Field, SVM/HCRF Combination, Space-time
Interest Points’ Trajectories.
Abstract: In this paper, we propose a novel human activity recognition approach based on STIPs’ trajectories as local
descriptors of video sequences. This representation compares favorably with state of art feature extraction
methods. In addition, we investigate the use of SVM/HCRF combination for temporal sequence modeling,
where SVM is applied locally on short video segments to produce probability scores, the latter being
considered as the input vectors to HCRF. This method constitutes a new contribution to the state of the art
on activity recognition task. The obtained results demonstrate that our method is efficient and compares
favorably with state of the art methods on human activity recognition.
1 INTRODUCTION
Recognition of human activity from video sequences
has a wide range of real-world applications such as
video surveillance, assistance for elder care, human
robot interaction, video indexing, etc. As a
consequence, a large number of approaches have
been devoted to human activity recognition. Based
on the features used for recognition, these
approaches can be classified into two categories:
holistic approaches (Blank et al., 2005) and local
approaches (Dollar et al., 2005); (Laptev, 2005). The
first category uses explicit body representation by
extracting features from the whole silhouette and
exploits both spatial information and motion
trajectory. However, it requires background
segmentation and tracking of the body or of the body
parts which may be difficult in the case of complex
scenes that contain a dynamic background, fast
motion and self occlusion. The second category uses
local Interest Points. It achieves state-of-the-art
performance for motion recognition tasks in
complex real-world scenes when combined with a
bag-of-word (BOW) representation. The major
advantage of these approaches is to provide a
concise representation of events while avoiding the
pre-processing phases related to
foreground/background segmentation and to
tracking. These interest points are usually described
by histograms of gradients (HOG) and histograms of
optical flows (HOF). However, these gradient-based
descriptors ignore the spatio-temporal layout of the
local features which may be very informative.
Addressing this problem, some recent research
(Messing et al., 2009); (Matikainen et al., 2009);
(Sun et al., 2009); (Wang et al., 2011) exploit the
trajectories information of local features. These
approaches outperform BOW based approaches in
activity recognition tasks in complexes real-world
scenes. In (Messing et al., 2009), trajectories of
Harris interest points are used for complex daily
living activity recognition. These trajectories are
tracked with a standard KLT method and encoded as
sequences of log-polar quantized velocities. In
(Matikainen et al., 2009), Matikainen et al use a
quantization of local features trajectory based on a
k-means clustering and affine transformation. Sun et
al. (Sun et al., 2009) recently used similar techniques
to model SIFT-feature trajectories. They considered
a fixed-dimensional velocity description using the
stationary distribution of a Markov chain velocity
model. Wang et al. (Wang et al., 2011) used dense
trajectories by sampling dense points from each
frame in multiple scales. The trajectories are
described by HOG, HOF and motion boundary
histogram (MBH) calculated in a volume
surrounding each trajectory. However, these
methods track local features that were proposed
essentially for image recognition tasks which are not
necessarily adapted to space-time data. These image
features correspond to points with a significant local
variation of intensities in the corresponding frame
568
Selmi M., A. El-Yacoubi M. and Dorizzi B. (2013).
A Combined SVM/HCRF Model for Activity Recognition based on STIPs Trajectories.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 568-572
DOI: 10.5220/0004267405680572
Copyright
c
SciTePress

without any consideration of the temporal context.
In this work, we consider the use of the
trajectories of local space-time interest points
(STIPs) that correspond to points with significant
local variation in both space and time, thus
extending the approaches above which are limited to
2D interest points. In fact, STIPs have proven to be a
strong feature extraction method that has given
impressing results in real-world human action
recognition tasks. Our motivation is that STIPs’
trajectories can provide rich spatio-temporal
information about human activity at the local level.
For sequence modeling at the global level, a suitable
statistical sequence model is required.
Hidden Markov Models (HMMs) (Rabiner,
1989) have been widely used for temporal sequence
recognition. However, HMMs make strong
independence assumptions on feature independence
that are hardly met in human activity tasks.
Furthermore, generative models like HMMs often
use a joint model to solve a conditional problem,
thus focusing on modeling the observations that at
runtime are fixed anyway. To overcome these
problems, Lafferty et al. (Lafferty et al., 2001) have
proposed powerful discriminative models:
Conditional Random Fields (CRF) for sequence text
labeling. CRF is a sequence labeling model that has
the ability to incorporate a long range dependency
among observations. CRF assign to each observation
in a sequence a label but it cannot capture intrinsic
sub-structures of observations. To deal with this,
CRF is augmented with hidden states that can model
the latent structures of the input domain with the so
called Hidden CRF (HCRF) (Quattoni, 2004). This
makes it better suited to modeling temporal and
spatial variation in an observation sequence. Such a
capability is particularly important as human
activities usually consist of a sequence of elementary
actions. However, HCRF needs a long time range
for the training phase. To overcome this problem we
propose to combine HCRF with a discriminative
local classifier (e.g SVM). The local classifier
predicts confidence of activity labels from input
vectors. We use the predicted confidence
measurements of different classes from the local
discriminative classifier as the input observation to
the HCRF model. Assuming, as is the usual case,
that the number of classes is significantly lower than
feature dimensionality, this will reduce as much the
feature space dimensionality during HCRF inference
while exploiting the high discriminative aspect of
SVM.
To summarize, the first objective of this paper is
to investigate the use of STIPs’ trajectories as
activity descriptors. To the best of our knowledge,
such a descriptor has not been addressed before in
the state of the art. The second objective is to assess
the discriminant power of HCRF-SVM combination
on a daily living activities recognition task. This
constitutes the second contribution of our work.
The organization of the paper is as follows.
Section 2 gives a brief description of local space
time features. HCRF and its combination with SVM
are reviewed in Section 3. In Section 4, the
databases used for experiments are described and
results are detailed and compared with the state of
the art. Section 5 draws some conclusions and
sketches futures directions of this work.
2 LOCAL SPACE-TIME
TRAJECTORIES
Local space-time features capture structural and
temporal information from a local region in a video
sequence. A variety of approaches exist to detect
these features (Wang et al., 2009). One of the most
popular methods is the one detecting Space Time
Interest Points (STIP), proposed by Laptev et al.
(Laptev et al., 2001), that extends Harris corner
detector to the space- time domain. The main idea is
to find points that have a significant change in space
and time.
To characterize the detected points, histograms
of gradients (HOG) and histograms of optical flows
(HOF) are usually calculated inside a volume
surrounding the interest point and used as
descriptors.
To provide a description at the video action
level, one of the most popular methods is to
represent each video sequence by a BOW of
HOG/HOF STIP’s descriptors. However, this
representation does not capture the spatio-temporal
layout of detected STIPs. To overcome this
limitation, a number of recent methods encode the
spatio-temporal distribution of interest points.
Nevertheless, these methods typically ignore the
spatio-temporal evolution of each STIP in the video
sequence. As mentioned above, some approaches
have attained a good result when using the
trajectories of 2D-interest points that are mainly
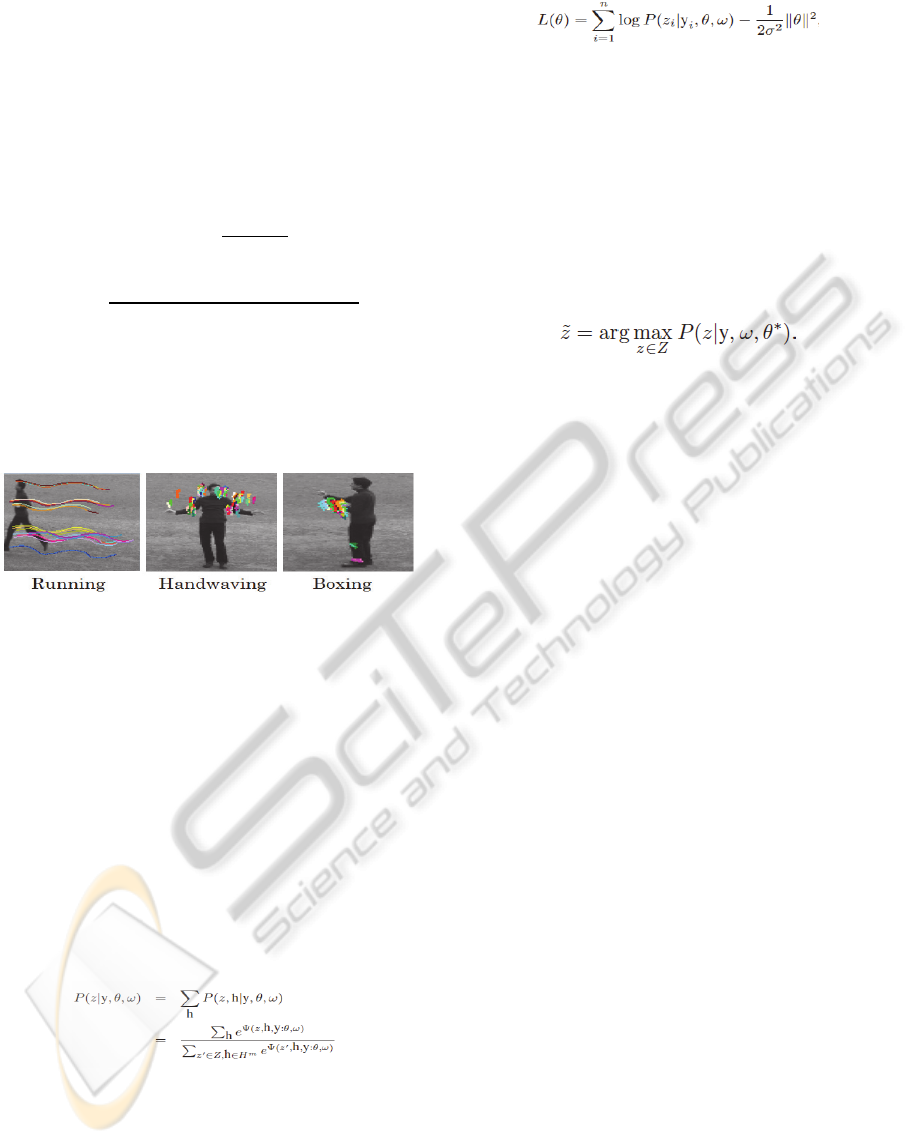
adapted to 2D space domain. In this section, we
present our approach of activity representation based
on the trajectories of STIPs (Figure 1) which are
adapted to video data.
To construct our basic feature, we first extract
STIPs from the video sequences. Then we track
them with Kanade-Lucas-Tomasi (KLT) tracker
ACombinedSVM/HCRFModelforActivityRecognitionbasedonSTIPsTrajectories
569
(Lucas and Kanade, 1981) for a fixed number of
frames T.
The trajectories description considered in this
work is based on the following three temporal
sequences:
- horizontal and vertical position trajectories:
=<
,
>,
- path-tangent angle:
arctan
,
- path velocity magnitude:
.
where n1..N is the time index and N is the time
duration.
As shown in Section 4, STIPs’ trajectories
outperform 2D-interest points’ trajectories and
HOG/HOF descriptor.
Figure 1: Example of STIPs trajectories in KTH dataset.
3 SVM-HIDDEN CONDITIONAL
RANDOM FIELDS
COMBINATION
HCRF is a powerful discriminative model that can
be used to predict a label z from an input y. y is a
vector of local observations y = {y
1
, y
2
,… , y
m
} and
each local observation y
i
is represented by a feature
vector, z is a member of a set Z which represents the
class labels.
An HCRF models the conditional probability of
a class label given a set of observations by:
where the summation is over hidden state sequences
h, and ω represents a specific window size. The
potential function Ψ(z, h, y : θ, ω), parameterized by
θ and ω measures the compatibility between a label,
a set of observations and a configuration of the
hidden states. The following objective function is
used in estimating the parameters:
where n is the total number of training sequences.
The first term is the conditional log likelihood of the
labels given the data while the second is the log of a
Gaussian prior with variance
2
.
The training phase aims at finding the best
parameters, θ
∗
= arg min -L(θ). It can be carried out
by gradient descent using LBFGS optimization
method (Byrd et al., 1995).
Given a new test sequence y and the parameters
values θ
∗
learned from training examples, the label
for the sequence is determined by:
As mentioned in the introduction, HCRF suffers
from a slow convergence during training. In fact,
HCRF uses, for parameter estimation, the forward–
backward algorithm that needs to scan the training
set many times. The training duration is correlated to
the dimension of data. To deal with this problem, we
use a SVM-HCRF combination. Using the
probability scores given by SVM as input of HCRF
will reduce considerably feature’s dimension and so
will accelerate the training and testing phases. In
addition, SVM is a popular method for classification
tasks due to its high discriminative and
generalization properties. It also has the ability to
use high-dimensional feature spaces via kernels.
Thus, using SVM as a local classifier can improve
the recognition rate while ensuring a significant
training speed-up.
To train SVM, first we split the video sequence
into segments. Each segment is locally represented
by a local Bag of Words (frequency histogram of
visual word occurrences): visual words are
constructed using k-means based on trajectories
descriptors. We train SVM on these local Bag of
Words and the generated activity probability scores
will be considered as the input of HCRF.
4 EXPRIMENTS
We start this section by an evaluation of STIP’s
trajectories performance, and then we evaluate the
performance of our model in a complex daily living
activity recognition task.
4.1 STIPs Trajectories Evaluation
In this section, we evaluate the proposed STIPs’
trajectories in action recognition task and compare it
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
570

to state-of-the-art methods. We provide detailed
analysis below.
4.1.1 Dataset Description
The KTH dataset (Schuldt et al., 2004) is one of the
most common datasets in evaluation of action
recognition. It consists of six types of human
actions: boxing, hand clapping, hand waving,
jogging, running and walking; performed by 25
subjects in 4 different scenarios. We divide the
samples into test set (9 subjects) and training set (16
subjects) as is usually done.
4.1.2 Evaluation Framework
In this section, we compare STIPs and Speeded Up
Robust Features (SURF) (Bay et al., 2006)
trajectories. SURF is a scale and rotation invariant
detector of distinctive key points from images. The
extracted points correspond to corners detected on
the integral image. We also compare the
performance of STIPs’ descriptors: trajectories and
HOG/HOF. Theses comparisons are based on the
bag of features approach where each video sequence
is represented as the frequency histogram over visual
words. We begin by extracting STIPs. We track
them during 15 frames using KLT tracker. STIPs’
trajectories are then quantized into visual words
using k-means clustering. In our experiments, we set
the number of visual words to 80 which gives the
optimal result. Finally, the video descriptor is
obtained by assigning every local descriptor to the
nearest visual word. This descriptor is the input of a
Gaussian kernel SVM.
4.1.3 Results and Interpretation
As Table1 shows, our trajectory descriptor
outperforms the HOG/HOF descriptor that contains
rich information about texture and local motion. And
it also outperforms the SURFs’ trajectories’
descriptor based on Velocity histories. The accuracy
gained is principally due to the fact that STIPs are
sparse and correspond to points with significant
local variation in both space and time. In addition,
most detected SURFs belong to the background.
Table 1: Comparison results on KTH dataset.
Methods Rates (%)
STIPs trajectories 84.25
HOG/HOF [4] 80
Velocity Histories(Messing et al., 2009) 74
4.2 SVM-HCRF Combination
4.2.1 Dataset Description
We evaluate our model on the Rochester dataset
(Messing et al., 2009). It consists of 10 complex
daily living activities: answering a phone, dialling a
phone, looking up a phone number in a telephone
directory, writing a phone number on a whiteboard,
drinking a glass of water, eating snack chips, peeling
a banana, eating a banana, chopping a banana, and
eating food with silverware. It was each performed
three times by five persons. To ensure appearance
variation, the activities are performed by people
having different shapes, sizes, genders, and
ethnicities.
4.2.2 Evaluation Framework
To evaluate our activity recognition system, we
compute recognition accuracy using the leave-one-
person-out cross-validation method. Each time, we
first leave out all the sequences pertaining to one
person. Then, we train the model using all the
remaining sequences, and we use the 10 activities of
the omitted person as test data. We average out the
results from all the persons to obtain the average
recognition rate.
As stated above, we first extract STIPs'
trajectories for L=15 frames. For each trajectory, we
calculate its basic descriptor (P
n
, θ
n
,V
n
) sequence.
Then, we construct K visual words using k-means
(K is empirically optimized, K=100). Each video is
split into smaller segments using a sliding window
of length 10. Each segment is locally represented as
a frequency histogram of word occurrences (local
Bag of Words). Based on these features, we train a
Gaussian kernel SVM in order to obtain the activity
probability scores for each segment. These
probability vectors are the input of our HCRF model
which is trained using ten hidden states.
4.2.3 Results and Interpretation
Table 2 compares our results to the state of the art.
Our approach significantly outperforms STIP-based
Bag-of-word approach based on HOG/HOF
descriptor. It also outperforms considerably the
recognition rate given by the “Latent Velocity
Histories” method (Messing et al., 2009): This
method is based on the velocity histories of the
SURF trajectories and Markov chain. Note that the
authors (Messing et al., 2009) have obtained an
important improvement (22%) by adding texture and
ACombinedSVM/HCRFModelforActivityRecognitionbasedonSTIPsTrajectories
571

color information. However, it is clear that color
information is actually irrelevant to activity
recognition. Although in (Messing et al., 2009), it
brings high improvements, this is due to the fact the
activities are performed in the same kitchen
consisting of the same objects (refrigerator, plates,
knives, etc.) whose color does not change. Had the
activities were performed in different locations with
different objects, using color would have actually
decreased performance.
Table 2: Results comparison on Rochester dataset.
Methods Rates (%)
Our approach 80
BOW of HOG/HOF (Messing et al., 2009) 59
Latent Velocity Histories(Messing et al., 2009) 67
Augmented Velocity Histories(Messing et al., 2009) 89
5 CONCLUSIONS
In this work we have introduced an approach for
activity recognition based on STIPs’ trajectories and
HCRF model. Our STIPs’ trajectories are more
robust than state-of-the-art interest point descriptors.
In fact, this descriptor captures the motion
information of efficient sparse interest points,
namely “3D Harris points”.
We also have described a new approach to train
an HCRF for high-dimensional feature sequences.
Our approach is based on SVM-HCRF combination.
It is faster and more scalable than standard HCRF
model.
Experiments show that the proposed method
achieves high accuracy.
The results obtained using
SVM-HCRF based on STIPs’ trajectories compare
favorably with the state of the art on the same
dataset. This is quite promising if we bear in mind
that no color information is considered in our
approach.
We have shown that trajectory descriptors
outperform STIP descriptors by a margin of 5%,
while consisting of a radically different feature
representation. The former is based on the intrinsic
information of the trajectory while the later is based
on a rough HOG/HOF description of STIP
neighborhood. An interesting consequence is that the
two representations are good candidates for feature
combination as their orthogonality means a real
potential for accuracy improvement. We intend to
explore this direction in our future work.
REFERENCE
M. Blank, L. Gorelick, E. Shechtman, M. Irani, and R.
Basri, (2005). Actions as space-time shapes, 2005. In
International Conference on Computer Vision.
P. Dollar, V. Rabaud, G. Cottrell, and S. Belongie, (2005).
Behavior recognition via sparse spatio-temporal
features. In VS-PETS, pages 65-7.
I. Laptev (2005). On space-time interest points. In. J.
Comput. Vision.
R. Messing, C. Pal, and H. Kautz, (2009). Activity
recognition using the velocity histories of tracked
keypoints. In ICCV.
P. Matikainen, M. Hebert, and R. Sukthankar, (2009).
Trajectons: Action recognition through the motion
analysis of tracked features. In ICCV workshop on
Video-oriented Object and Event Classification.
J. Sun, X. Wu, S. Yan, L.-F. Cheong, T.-S. Chua, and J.
Li, (2009). Hierarchical spatio-temporal context
modeling for action recognition. In CVPR.
Heng Wang, Alexander Kl¨aser, Cordelia Schmid, Cheng-
Lin Liu, (2011). Action Recognition by Dense
Trajectories. In CVPR: 3169-3176
Rabiner, L., (1989). A tutorial on HMM and selected
applications in speech recognition. In Proceedings of
the IEEE, 77(2):257–286.
J. Lafferty, A. McCallum, and F. Pereira, (2001).
Conditional random fields: probabilistic models for
segmenting and labeling sequence data. In ICML.
A. Quattoni, M. Collins, and T. Darrell, (2004).
Conditional random fields for object recognition. In
NIPS.
H. Wang, M. M. Ullah, A. Klaser, I. Laptev, and C.
Schmid, (2009). Evaluation of local spatio-temporal
features for action recognition. In British Machine
Vision Conference.
B. D. Lucas and T. Kanade (1981). An iterative image
registration technique with an application to stereo
vision. In IJCAI, pages 674–679.
Bay, H., Tuytelaars, T., and Gool, L. J. V., (2006). Surf:
Speeded up robust features. In ECCV (1)’06, pages
404–417.
R. H. Byrd, P. Lu and J. Nocedal, (1995). A Limited
Memory Algorithm for Bound Constrained
Optimization, SIAM Journal on Scientific and
Statistical Computing, 16, 5, pp. 1190–1208.
C. Schuldt, I. Laptev, and B. Caputo, (2004.). Recognizing
human actions: A local svm approach. In ICPR, pages
32–36.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
572
