
Evaluation of RSS-based Position Tracking using WSNs for Resource
Localization in an Indoor Construction Environment
Meimanat Soleimanifar
1
, Ming Lu
1
, Ioanis Nikolaidis
2
and Xuesong Shen
1
1
Department of Civil and Environmental Engineering, University of Alberta, Edmonton, Canada
2
Department of Computing Science, University of Alberta, Edmonton, Canada
Keywords: Construction Management, Location Aware Computing, Wireless Sensor Networks, Received Signal
Strength, Real-time Positioning, Indoor Environments.
Abstract: Timely information of construction resource is always a concern and an essential task for construction
engineers and managers. In the recent past, Wireless Sensor Networks (WSNs) have emerged as a
promising means to improve the current construction localization applications due to the ease of deployment
and expandability to large scale construction projects, low cost, and capacity to function efficiently under
dynamic and rough environments. Received Signal Strength Indicator (RSSI) based localization is a popular
technique especially for indoor environments, where satellite based positioning is infeasible. This study
evaluates multilateration localization, a popular localization technique, in construction environments as well
as a second, profiling-based, localization technique. Both techniques RSSI values collected in a WSN.
Indoor experiments were conducted and their results reveal that acceptable position accuracy can be
obtained with the profiling-based architecture.
1 INTRODUCTION
The construction industry is currently seeking to
employ techniques that can reduce project
completion time and cost, and improve project
productivity and performance. Awareness of
resource status, such as the location of tools,
equipment, materials and workers, can play an
important role in attaining cost and timeliness
objectives.
Localization is a building block for
implementing higher level functionalities based on
positioning technologies, such as tracking,
monitoring, and data collection. Previous research
on the use of wireless technologies for localization
in construction sites, has focused mainly on
localization in open areas, for instance, tool tracking
and locating materials in a storage yard (Song et al.,
2006); (Goodrum et al., 2006); (Ergen et al., 2007);
(Teizer et al., 2007); (Chin and Yoon, 2008).
However, provision of a reliable localization
technique for indoor or partially covered
environments (where satellite-based positioning
such as GPS is infeasible due to signal obstruction)
is a challenge. Wireless sensor network (WSN)
technologies provide flexible data acquisition and
improved communication automation suitable for
construction environments. This is due to their ease
of deployment and expandability to large scale
construction projects (Skibniewski and Jang, 2009).
It is therefore natural to co-opt WSNs for
localization purposes as well. The cost-effectiveness
and capacity to work efficiently under dynamic and
harsh environment are the other factors that make
WSNs an appropriate technology to improve current
tracking and monitoring practices in construction
(Shen et al., 2008).
The objective of this paper is to study a low cost
and accurate indoor localization and resource
tracking methodology utilizing WSNs for
construction projects. First, we investigate the
feasibility and application of a geometric
multilateration localization algorithm on the basis of
received signal strength (RSS) measurement based
on a ranging technique. To overcome the limitations
of multilateration, we use an alternative technique,
that determines the location of mobile sensor nodes
(“tags”) by profiling the RSS collected by stationary
sensor nodes (“pegs”) with known locations. An
experiment was conducted in a parking lot in order
to evaluate the potential and confirm the capability
of RSS-based localization in construction sites.
189
Soleimanifar M., Lu M., Nikolaidis I. and Shen X..
Evaluation of RSS-based Position Tracking using WSNs for Resource Localization in an Indoor Construction Environment.
DOI: 10.5220/0004274301890192
In Proceedings of the 2nd International Conference on Sensor Networks (SENSORNETS-2013), pages 189-192
ISBN: 978-989-8565-45-7
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 LOCALIZATION TECHNIQUES
The first, and well-known technique, we consider is
a range-based multilateration technique. Given that
the ranges between a mobile node and three or more
stationary nodes are determined, the location of the
mobile node can be calculated by applying the
geometric multilateration algorithm. RSSI-based
ranging is low-cost and simple to implement and
does not require expensive, specialized,
infrastructure (Haque et al., 2009).
The RSS-based range measurement is developed
based on propagation-loss characteristics of radio
frequency signals. One of the factors influencing
RSS values obtained by a wireless device is the
distance between transmitter and receiver, as this
distance causes attenuation, “path loss,” captured in
the RSS values. One usually applies a “standard”
propagation model, such as the ITU indoor signal
propagation model which is considered applicable to
complicated, hostile, indoor environments delimited
by walls. It is given by (Stallings 2005, Shen et al.
2011):
10
147.56
(1)
where is the distance power loss coefficient and
denotes the floor penetration loss factor
which can be omitted for line-of-sight transmission.
It is noteworthy to mention that is not a specific
value for construction environments, and can only
be determined based on collecting field data for the
specific environment (Shen et al., 2011). Then, the
received signal strength at distance can be
calculated by essentially solving equation (1) for .
Using the estimated distances from the known
coordinates of the reference nodes, the location is
calculated based on multilateration.
2.1 LEMON
An alternative to range-based localization is range-
free localization. An example of a range-free
localization is LEMON (Haque et al., 2009). It
consists of two phases: 1) profiling and 2) actual
localization. In the first phase, a database of RSSI
readings is populated for transmissions received
from tags at known locations. The database consists
of samples which are stored as triplets ;Ω;τ
in whichC represents the known coordinates of the
sampled point,Ω
stands for the association set
(which comprises receiver ID and the RSS value
received by that Receiver), and
symbolizes the
class of sample (e.g., channel/frequency used, and
any other pertinent transmitter configuration
information). The second phase, i.e., the actual
localization of tracked tag at an unknown location, is
similar to the profiling stage with the only difference
being that is unknown.
In the localization stage, the server compares the
tracked tag's RSS, as reported measured by all the
receivers in the monitored area, against the RSS of
each profiled reference point and evaluates the
difference between the tag and all the profiling
points. If Ω
,…,
and Ψ
,…,
are assumed to be two association’s sets, the
distance between these sets will be:
Ω,Ψ
(2)
where N is the total number of receivers in the
network and R
j
is defined as r
, if the pair
p
,r
occurs is found in Ω , and 0 otherwise.
Therefore, the server evaluates the signal-space
distance of each pre-selected sample (its association
set) from the tag’s association set, representing the
combined momentary perception of the tag's RSS by
all the receivers (pegs) that can hear it.
It should be emphasized that, contrary to range-
based techniques, no attempt is made to relate the
distance in the signal space to a Euclidean distance
from the peg. The next step is the selection of an
arbitrary number, , of profiled samples with the
smallest distance from the tracked tag. This is called
the “best matched” set of profiled points.
Subsequently, the coordinates of the selected
samples are averaged to produce the estimated
coordinates of the tag. The averaging formula biases
the samples in such a way that the ones with a
smaller distance contribute with a proportionally
larger weight. The biasing reflects the intuition that a
smaller signal-space distance implies very likely a
more reliable signal, by virtue of being closer to the
corresponding receiving peg. If
is the
maximum distance among the best K selected
samples and
∑
is the sum of all those
distances then the tag coordinates are estimated as:
∑
(3)
∑
(4)
where
,
are the coordinates associated with
sample i.
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
190
3 EXPERIMENTS
The infrastructure nodes that we used for assessing
the proposed localization architecture are low-cost,
low-power wireless devices. The nodes utilized for
our experiments make use of the CC1100 RF
module from Texas Instruments operating within the
915MHz band. From an operational point of view,
the node is called a “peg” when it captures signal
strength. The pegs’ locations are fixed (static nodes)
and their precise location needs to be known. A
monitored device, which is a node of the same type
as a peg, is called a tag whose location needs to be
determined. The experiments were conducted by
deploying a number of nodes in an underground
parking lot over an approximately 12m×9m
rectangular layout. The environment incorporated
certain features one can find in a construction
environment, such as steel access doors, metallic
cages, concrete columns, and power cables, and was
subjected to occasional (uncontrolled) pedestrian
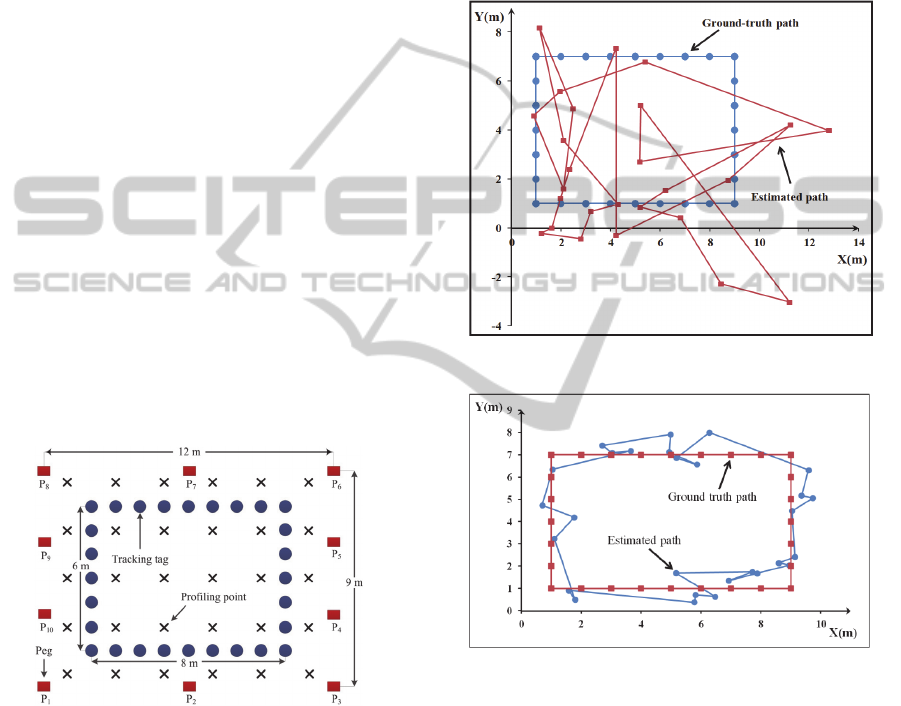
and vehicular traffic. Fixed nodes were distributed at
the corners of the 12m×9m rectangular area and a
node (to be localized) was moving along a
rectangular path of 8m×6m within that area. The peg
placement (red squares), tracked tag (blue circles),
and profiling points for LEMON (× marks) is
depicted in Figure 1.
Figure 1: Experimental layout.
A simple visual comparison of the
multilateration (Figure 2) and LEMON (Figure 3)
results points to a distinct advantage for LEMON.
While this fact is consistent with previous
observations of shortcomings of multilateration
techniques, we note two important aspects. First, the
advantage of LEMON arguably comes at the cost of
a more labor-intensive task of profiling, while an
improvement (if any) of the multilateration
techniques could come from fitting a more
appropriate and representative loss model to the
particular propagation environment. However,
developing a propagation model for a particular
environment is likely a labor-intensive task as well.
Hence, it is unclear whether a labor-intensive task
can be avoided if we seek improved accuracy.
Therefore, it is fruitful to consider techniques
whereby the profiling (for range-free) or model-
fitting (for range-based) is (at least partly)
automated.
Figure 2: Path (calculated vs. true) using mutlilateration.
Figure 3: Path (calculated vs. true) using LEMON.
A second observation is the relative
“smoothness” of the path in Figure 3. In addition to
the average error of the LEMON approach being
less than 1.5m compared to more than 4m of the
multilateration technique, the standard deviation of
LEMON is also much smaller (0.61m vs. 2.4m for
mutlilateration). What this suggests is that
algorithms that might operate on top of the
localization estimates (like, e.g., tracking) are
subjected to less variance in their input and could
conceivably produce better fidelity results. Hence,
another way to see the tradeoff is that cost paid
“upfront” for labor-intensive tasks, can pay
performance dividends at a higher-level application.
EvaluationofRSS-basedPositionTrackingusingWSNsforResourceLocalizationinanIndoorConstructionEnvironment
191

Figure 4: Collected RSSI values.
4 CONCLUSIONS
We observed that localization performance in indoor
environments can be improved by utilizing a
premeasured map of radio signal strengths. In this
case, a set of predefined locations is associated with
RSS values (that are sometimes referred to as
location “fingerprints. The unknown location can
then be estimated online by measuring the signal
strength at particular location and searching for the
pattern to determine the set of closest matches stored
in the database. A weighted average of coordinates
of those matches can then be used as an approximate
location of the tracked object.
Two aspects requiring further study are the
deployment of the pegs and the need to re-profile.
Pegs could be incrementally deployed as the
structure gets erected, while re-profiling may be
needed while the structures change (as they are
erected), and hence the RF propagation
characteristics change in it. So far we observed from
other tests that the changes in the overall RSS map
may be relatively, on the average, insignificant with
the introduction of cars and humans but some areas
are more impacted than others, and hence re-
profiling is necessary at least in certain areas. As a
starting point, we will exploit the fact that each peg
node fixed on a known location could be taken as a
profiling reference point as well to assess when re-
profiling is warranted.
Our aim is to develop a self-adaptive, self-
calibrating, real-time positioning solution based on
frequent, dynamic RSS re-profiling. Part of the
challenge is how to determine the best placement of
pegs, given that there may exist natural restrictions
to their placement. Additionally, as can be seen in
Figure 4, certain RSS values collected are essentially
outliers. While we used all of the collected values in
both techniques presented in this paper, one can
reasonably argue that certain (especially the lower)
values (at the -100dBm mark or less) are outliers and
should be eliminated. We plan to develop pre-
processing steps to assess the reliability (and outlier
elimination) of the measurements before using them
for any localization technique.
ACKNOWLEDGEMENTS
The authors would like to thank Dr. Israat T. Haque
for help with the experimental setup. The project
was partially funded by a grant from NSERC.
Equipment was provided by OlsoNet.
REFERENCES
Song, J., Haas, C. T., Caldas, C. H., 2006. Tracking the
location of materials on construction job sites. ASCE
Journal of Construction Engineering and
Management, 132(9), 911–918.
Goodrum, P. M., McLaren, M. A., Durfee, A., 2006. The
application of active radio frequency identification
technology for tool tracking on construction job sites.
Autom. Constr., 15(3) 292–302.
Ergen E., Akini B., Sacks S., 2007. Tracking and locating
components in a precast storage yard utilizing radio
frequency identification technology and GPS, J.
Autom. Constr., (16) 354-367.
Teizer J., Lao D., Sofer M., 2007, Rapid automated
monitoring of construction site activities using ultra-
wideband, Proc. 24th ISARC, Madras, Kochi, India
23-28.
Chin S., Yoon S., 2008. RFID+4D CAD for Progress
Management of Structural Steel Works in High-Rise
Buildings, Journal of Computing in Civil Engineering,
22(2) 74-89.
Skibniewski, M. J., Jang, W. S., 2009. Simulation of
Accuracy Performance for Wireless Sensor-Based
Construction Asset Tracking. Computer-Aided Civil
and Infrastructure Eng., (24) 335-345.
Shen X., Wu C., Ming L., 2008. Wireless Sensor
Networks for Resources Tracking at Building
Construction Sites, Tsinghua Science and Technology,
(13) 78-83.
Haque, I.T., Nikolaidis, I., Gburzynski, P., 2009. On the
Impact of Node Placement and Profile Point Selection
on Indoor Localization, Proceedings of WMNC 2009,
Gdansk, Poland.
Stallings, W., Wireless communications and networks,
Pearson Prentice Hall, Upper Saddle River, N.J., 2005.
Shen, X. S., Lu M., Wei B., Chen W.: Field Evaluation of
ZigBee-based Wireless Sensor Networks for
Automated Resource Tracking on Construction Sites,
CSCE Conference, 3rd International/9th Construction
Specialty, Ottawa, Ontario, (2011) 14-17.
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
192
