
Equivalence between Two Flowshop Problems
MaxPlus Approach
Nhat Vinh Vo and Christophe Lent
´
e
Universit
´
e Franc¸ois Rabelais Tours, Laboratoire d’Informatique (EA 6300),
´
Equipe Ordonnancement et Conduite (ERL CNRS 6305), Tours, France
Keywords:
Flowshop, MaxPlus Algebra, Modeling.
Abstract:
In this paper, a flowshop problem with minimal and maximal delays, setup and removal times is tackled. It
is shown that this problem is equivalent to another flowshop problem with only minimal and maximal delays,
which can be seen as a central problem. The proof is done using an algebraic way which allows to identify the
role of each constraint, once the modeling is performed.
1 INTRODUCTION
In this paper, a flowshop problem with a large set of
constraints is tackled, the objective is to minimize the
makespan. It is shown that this problem can be mod-
eled in an algebraic way and that, as a consequence, a
kind of central problem can be highlighted.
The proposed model is based on MaxPlus alge-
bra. This algebra is sometimes used in control sys-
tem, particularly in relation with Petri Nets, but very
few in scheduling theory. Nevertheless, one can cite
some articles like (Giffler, 1963) on project schedul-
ing, (Hanen and Munier, 1995) on cyclic parallel ma-
chine problems, (Cohen et al., 1985), (Gaubert, 1992)
on cyclic flowshop scheduling problem and (Gaubert
and Mairesse, 1999) on cyclic job-shop scheduling
problems. The MaxPlus approach was applied in
modeling and scheduling flowshop problem with min-
imal delays, setup and removal times in (Lent
´
e, 2001),
(Bouquard et al., 2006) and flowshop problems with
minimal and maximal delays in (Bouquard and Lent
´
e,
2006) for two machines flowshop problems and in
(Augusto et al., 2006) for any number of machines.
In each case, a square matrix was associated to each
job and a similar matrix could be associated to each
sequence of jobs. In the two last articles, it is shown
how to derive lower bounds by constructing a no-wait
instance from the job-matrices that can be solved by
an efficient procedure designed for the traveling sales-
man problem (Carpaneto et al., 1995).
This paper presents a synthesis and a generaliza-
tion of these studies, by considering simultaneously
minimal and maximal delays and setup and removal
times. The objective of this paper is to bring out
equivalence between this general flowshop problem
and the flowshop problem with only minimal and
maximal delays. This equivalence will be put in evi-
dence through a MaxPlus modeling.
Following this introduction, this general flowshop
problem with associated constraints and also nota-
tions used in this paper will be described. The third
part describes the algebraic approach, using MaxPlus
algebra. The fourth one presents how to model the so
called general problem and to calculate in detail job
associated matrix in MaxPlus. The next part indicates
how to transform a Job-matrix of this problem into
a Job-matrix of a minimal - maximal delay flowshop
problem that therefore will be highlighted as a central
problem.
2 FLOWSHOP WITH
MINIMAL - MAXIMAL
DELAYS, SETUP AND
REMOVAL TIME
Figure 1 illustrates the constraints that are applied to
a job. The considered flowshop problem is composed
of m machines numbered from M
1
to M
m
and a set
of n jobs. A job J
i
is then composed of m operations
with duration p
i1
, p
i2
, . .., p
im
: the k
th
operation has
to be executed on the k
th
machine and it can be done
only when the (k − 1)
th
operation of the same job has
been completed on machine M
k−1
. Before and after
its execution, an operation requires a setup and a re-
174
Vo N. and Lenté C..
Equivalence between Two Flowshop Problems - MaxPlus Approach.
DOI: 10.5220/0004278903220325
In Proceedings of the 2nd International Conference on Operations Research and Enterprise Systems (ICORES-2013), pages 322-325
ISBN: 978-989-8565-40-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Schema of the system.
moval time, noted S
ik
and R
ik
. During these times the
machine is considered as occupied. At any moment,
each machine can handle at most one task.
Moreover, a waiting time between the execution
of two consecutive operations of the same job must
respect both a minimal and maximal delays that are
noted α
ik
and β
ik
(2 ≤ k ≤ m).
The preemption is not allowed but only permuta-
tion schedules are considered, which means that all
jobs are executed in the same order by all machines.
For a given sequence, the end date C
ik
of the opera-
tion k of the job J
i
is measured by the end of its asso-
ciated removal time. The makespan of a schedule is
then defined by the maximum of dates C
im
for all jobs
J
i
(C
max
= max
1≤i≤n
C
im
). This problem can be denoted
by F
m
—S
nsd
, R
nsd
, min −max delay, perm—C
max
ac-
cording to notation of Graham (Graham et al., 1979).
3 ALGEBRAIC APPROACH
3.1 MaxPlus Algebra
As a short introduction of MaxPlus algebra, let’s say
that in this algebra we denote the maximum by ⊕ and
the addition by ⊗. The first operator, ⊕, is idempo-
tent, commutative, associative and has a neutral ele-
ment (−∞) denoted by 0. The second operator, ⊗,
is associative, distributive on ⊕ and has a neutral ele-
ment (0), denoted by 1. The element 0 is an absorbing
element for the operator ⊗. These properties can be
summarized by saying that R
max
= (R ∪ {−∞}, ⊕, ⊗)
is a dioid. It is important to note that in MaxPlus al-
gebra and more generally in dioids, the first operator
does not allow simplification: a ⊕ b = a ⊕ c 6⇒ b = c.
Furthermore, in R
max
, the second operator ⊗ is com-
mutative, and except for 0 , every element is invert-
ible: the inverse of a is denoted by a
−1
or
1
a
. For
more convenience we denote the ordinary subtraction
by
a
b
instead of a ⊗ b
−1
and by ab the product a ⊗ b.
Moreover, it is possible to extend these two opera-
tors to m × m matrices of elements of R
max
. Let A and
B be two matrices of size m × m and let [.]
i, j
be the
element at row i and column j of a matrix, operators
⊕ and ⊗ are defined by:
∀(i, j) ∈ {1, . . . , m}
2
,[A ⊕ B]
i, j
= [A]
i, j
⊕ [B]
i, j
∀(i, j) ∈ {1, . . . , m}
2
,[A ⊗ B]
i, j
=
m
O
k=1
[A]
i,k
⊗ [B]
k, j
The set of m × m matrices in R
max
endowed with
these two operators is also a dioid. But the operator ⊕
is not commutative and matrices are generally not in-
vertible. For more details, please see (Gaubert, 1992;
Baccelli et al., 1992; Gunawardena, 1998).
3.2 Generalities about MaxPlus
Modeling of Flowshop Problems
The MaxPlus modeling of a flowshop problem al-
ways follows the same principles, whatever the con-
straints are. A matrix T
i
is associated to each job
J
i
. This matrix is computed from data linked to the
job and defines entirely this job. This matrix allows
also to compute the completion times
~
C
i
of the op-
erations of the job knowing the dates of availabil-
ity
~
δ of all the machines
~
C
i
=
~
δ ⊗ T
i
. As a conse-
quence, considering a sequence σ of ν jobs, if ma-
chines are available at dates
~
δ, the dates of liberation
~
C
σ
of the machines by the sequence are given by for-
mula
~
C
σ
=
~
δ ⊗
ν
O
i=1
T
σ(i)
. So it is possible to associate
to a sequence σ the matrix T
σ
=
ν
O
i=1
T
σ(i)
. Then lower
bounds can be derived from the algebraic modeling
by extracting sub-matrices from matrices T
i
(Lent
´
e,
2001; Augusto et al., 2006). MaxPlus provides a for-
mal framework for the study of flowshop problems.
It allows to extend or adapt easily results from some
kinds of flowshop problems to others.
3.3 Application to Flowshop with
Minimal - Maximal Delays
In (Augusto et al., 2006), the authors have studied and
solved a flowshop with minimual and maximal de-
lays. The flowshop problem is the same that the one
described in section 2 except that there is no setup
nor removal time. They established the form of the
matrix T
i
associated to a job J
i
(Equation (1) shows
an example for three machines). Then they defined
a lower bound following this way: from a matrix T
i
,
EquivalencebetweenTwoFlowshopProblems-MaxPlusApproach
175
they built a lower matrix T
NW
i
(T
NW
i
≤ T
i
) character-
istic of a nowait flowshop job. The resolution of the
corresponding nowait flowshop problem, which can
be done using a fast TSP resolution procedure, gives
a lower bound of the initial flowshop problem. Fi-
nally, they designed a Branch and Bound procedure
to solve the F
m
|min − max delay, perm|C
max
.
T
i
=
p
i1
p
i1
p
i2
α
i2
p
i1
p
i2
α
i2
p
i3
α
i3
1
β
i2
p
i2
p
i2
p
i3
α
i3
1
β
i3
1
p
i2
β
i2
1
β
i3
p
i3
(1)
4 F
M
|S
NSD
,R
NSD
,MIN −
MAX DELAY S, PERM|C
MAX
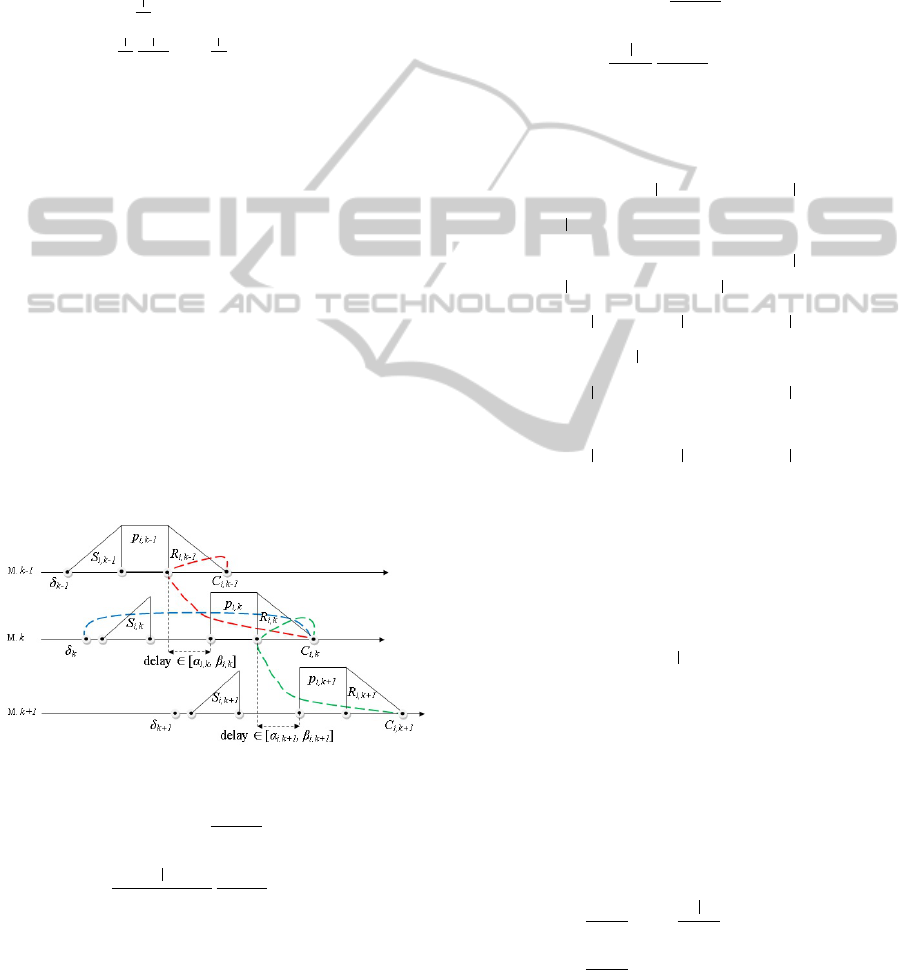
4.1 Modeling
The description from section 2 leads to the sets of in-
equations (2), (3) and (4), written in MaxPlus nota-
tions. They summarize all the constraints applied to
the k
th
operation of a job J
i
. The term δ
k
represents
the date of availability of machine M
k
to perform the
setup operation. Typically, in a schedule, δ
k
could be
the completion time of operation k of the job preced-
ing J
i
. These inequations are illustrated in figure 2,
they will serve to determine a linear relation between
the dates of availability δ
k
of the machines and the
end dates C
ik
of job J
i
.
Figure 2: Model for calculation.
C
ik
≥ C
i(k−1)
α
ik
p
ik
R
ik
R
i(k−1)
(2 ≤ k ≤ m) (2)
C
ik
≥ C
i(k+1)
1
p
i(k+1)
β
i(k+1)
R
ik
R
i(k+1)
(1 ≤ k ≤ m − 1) (3)
C
ik
≥ δ
k
S
ik
p
ik
R
ik
(1 ≤ k ≤ m) (4)
4.2 Job Associated Matrix
Remembering section 3.2, an expected relation is of
the form:
~
C
i
=
~
δT
i
(5)
where T
i
is the matrix associated to the job J
i
. Let in-
troduce some new notations before pursuing calculus:
a
ik
= α
i(k+1)
p
i(k+1)
R
i(k+1)
R
ik
(1 ≤ k ≤ m − 1) (6)
b
ik
=
1
β
ik
p
ik
R
i(k−1)
R
ik
(2 ≤ k ≤ m) (7)
~
C
i
= (C
i1
, C
i2
,..., C
im
) (8)
~
δ = (δ
1
, δ
2
,..., δ
m
) (9)
P
i
=
S
i1
p
i1
R
i1
0 ... 0
0 S
i2
p
i2
R
i2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
0 ... 0 S
im
p
im
R
im
(10)
A
i
=
0 a
i1
0 ... 0
b
i2
0 a
i2
.
.
.
.
.
.
0 b
i3
.
.
.
.
.
.
0
.
.
.
.
.
.
.
.
.
.
.
.
a
i(m−1)
0 ... 0 b
im
0
(11)
Basically, vector
~
C
i
represents end dates of operations
of job J
i
, matrix P
i
regroups data defining an operation
and matrix A
i
the data linking two successive opera-
tions of job J
i
, it can be seen as a ”delay matrix”.
According to this system of inequations (2), (3) and
(4), it can be inferred that:
~
C
i
≥
~
δP
i
⊕
~
C
i
A
i
. The small-
est solution of this system is found using Kleene star:
~
C
i
=
~
δP
i
A
i
∗
where A
∗
i
= (1 ⊕ A
i
⊕A
2
i
⊕. . . ⊕A
q
i
⊕. . .).
Therefore, to meet relation (5) we must define
T
i
= P
i
A
i
∗
(12)
T
i
is the matrix associated to job J
i
. Note that this ma-
trix is totally independent of position of the associated
job in the sequence. The general form of matrix T
i
is:
[T
i
]
`,c
=
S
i`
p
i`
R
ic
c
O
k=`+1
p
ik
α
ik
if ` < c
S
i`
p
i`
R
ic
if ` = c
S
i`
R
ic
β
i`
`−1
O
k=c+1
1
p
ik
β
ik
if c < ` − 1
S
i`
R
ic
β
i`
if c = ` − 1
(13)
As an example, in case of 3 machines, the matrix
associated to the job J
i
is:
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
176

T
i
=
S
i1
p
i1
R
i1
S
i1
p
i1
R
i2
p
i2
α
i2
S
i1
p
i1
R
i3
p
i2
α
i2
p
i3
α
i3
S
i2
R
i1
β
i2
S
i2
p
i2
R
i2
S
i2
p
i2
R
i3
p
i3
α
i3
S
i3
R
i1
β
i3
1
p
i2
β
i2
S
i3
R
i2
β
i3
S
i3
p
i3
R
i3
(14)
It must be noted that this model can be generalized
to additional constraints such as release dates (r
i
), la-
tency duration (q
i
) or some batch constraints.
5 CENTRAL PROBLEM
In (Augusto et al., 2006) or (Fondrevelle et al., 2006),
authors proposed a way to calculate lower bounds
and optimal schedules for problem Fm—min − max
delays; perm—C
max
. This section represents now
how to transform our studied problem into flowshop
with only minimal and maximal delays. To do that,
terms relating to setup and removal times must be in-
tegrated to the definition of new processing times and
minimal and maximal delays. It will define a new
flowshop problem whose characteristics are described
below. In this new formulation, a job J
i
is only defined
by operations’ processing times p
ik
and minimal and
maximal delays α
ik
and β
ik
. But its associated matrix
T
i
remains unchanged.
p
ik
= S
ik
p
ik
R
ik
(1 ≤ k ≤ m)
β
ik
=
β
ik
S
ik
R
i(k−1)
(2 ≤ k ≤ m)
α
ik
=
α
ik
S
ik
R
i(k−1)
(2 ≤ k ≤ m)
(15)
For example, in case of three machines, the matrix
associated to job J
i
becomes
T
i
=
p
i1
p
i1
α
i2
p
i2
p
i1
α
i2
p
i2
α
i3
p
i3
1
β
i2
p
i2
p
i2
α
i3
p
i3
1
β
i2
p
i2
β
i3
1
β
i3
p
i3
(16)
6 CONCLUSIONS
Thanks to MaxPlus approach, it is possible to trans-
form a flowshop scheduling problem into a matrix
problem. Some manipulations over these matrices al-
low us to exhibit a sort of central problem. Permu-
tation flowshop with several classical constraints are
equivalent to some permutation flowshop with min-
imal and maximal delays. Calculus have been pre-
sented with non sequence dependent setup and re-
moval times, but the equivalence can also be stated for
release dates or groups of jobs for example. This re-
sult means that one can focus our efforts to solve this
central problem. It also means that it must be possible
to adapt automatically a method developed for a type
of constraints to another type of constraints.
Further research will concern modeling a greater
set of constraints, like limited stocks between ma-
chines or blocking constraints and, if possible and
if necessary, the definition of an other central prob-
lem. They will also concern improvements of solving
methods presented in (Augusto et al., 2006).
REFERENCES
Augusto, V., Lente, C., and Bouquard, J. L. (2006).
R
´
esolution d’un flowshop avec delais minimaux et
maximaux. In MOSIM.
Baccelli, F., Cohen, G., Olsder, G., and Quadrat, J. (1992).
Synchronisation and Linearity: An Algebra for Dis-
crete Event Systems. John Wiley and Sons, New York.
Bouquard, J. and Lent
´
e, C. (2006). Two-machine flow shop
scheduling problems with minimal and maximal de-
lays. 4’OR, 4(1):15–28.
Bouquard, J., Lente, C., and Billaut, J. (2006). Applica-
tion of an optimization problem in Max-Plus algebra
to scheduling problems. Discrete Applied Mathemat-
ics, 154(15):2064–2079.
Carpaneto, G., Dell’amico, M., and Toth, P. (1995).
Carpaneto, Dell’amico, Toth - 1995 - Exact solu-
tion of large asymmetric traveling salesman prob-
lems.pdf. ACM Transactions on Methematical Soft-
ware, 21(4):394–409.
Cohen, G., Dubois, D., Quadrat, J., and Viot, M. (1985).
A linear system-theoretic view of discret-event pro-
cesses and its use for performance evaluation in man-
ufacturing. IEEE Trans. Automatic Control, 30:210–
220.
Fondrevelle, J., Oulamara, A., and Portmann, M.-C. (2006).
Permutation flowshop scheduling problems with max-
imal and minimal time lags. Computers & Operations
Research, 33:1540–1556.
Gaubert, S. (1992). Th
´
eorie des syst
`
emes lin
´
eaires dans les
dio
¨
ıdes. PhD thesis.
Gaubert, S. and Mairesse, J. (1999). Modeling and analysis
of timed petri nets using heaps of pieces. IEEE Trans.
Automatic Control, 44(4):683–698.
Giffler, B. (1963). Schedule algebras and their use in
formulating general systems simulations,. in ”Indus-
trial scheduling”, Muth and Thompson (eds.),Prentice
Hall, New Jersey (U.S.A.).
Graham, R. L., Lawler, E. L., Lenstra, J. K., and Rinnooy
Kan, A. H. (1979). Optimization and approximation
in deterministic sequencing and scheduling: A survey.
Annals of Discrete Mathematics, 5(2):287–326.
Gunawardena, J. (1998). Idempotency. Publications of the
Newton Institute, Cambridge University Press.
Hanen, C. and Munier, A. (1995). Cyclic scheduling on
parallel processors: an overview. In Chretienne, P.,
Coffman, E., Lenstra, J., and Liu, Z., editors, Schedul-
ing Theory and its Applications, pages 193–226. John
Wiley.
Lent
´
e, C. (Nov. 2001). Analyse Max-Plus de probl
`
emes
d’ordonnancement de type Flowshop. Th
`
ese de doc-
torat, Universit
´
e Frano¸is Rabelais de Tours.
EquivalencebetweenTwoFlowshopProblems-MaxPlusApproach
177
