Unposed Object Recognition using an Active Approach
Wallace Lawson and J. Gregory Trafton
Naval Center for Applied Research in Artificial Intelligence, Washington D.C., U.S.A.
Keywords:
Object Recognition, Active Object Recognition, Neural Networks.
Abstract:
Object recognition is a practical problem with a wide variety of potential applications. Recognition becomes
substantially more difficult when objects have not been presented in some logical, “posed” manner selected by
a human observer. We propose to solve this problem using active object recognition, where the same object
is viewed from multiple viewpoints when it is necessary to gain confidence in the classification decision. We
demonstrate the effect of unposed objects on a state-of-the-art approach to object recognition, then show how
an active approach can increase accuracy. The active approach works by attaching confidence to recognition,
prompting further inspection when confidence is low. We demonstrate a performance increase on a wide
variety of objects from the RGB-D database, showing a significant increase in recognition accuracy.
1 INTRODUCTION
State-of-the-art-approaches to visual recognition have
focused mostly on situations when objects are
“posed” (i.e., the camera angle, lighting, and position
has been chosen by an observer). When conditions
become more variable, the ability to visually recog-
nize objects quickly decreases. In one prominent ex-
ample demonstrating this affect, (Pinto et al., 2008)
produced very good accuracy classifying objects from
the Caltech-101 dataset (Fei-Fei et al., 2004), but their
state-of-the-art approach was reduced to performing
at chance when variation was introduced. Specifi-
cally, this meant viewing objects at any arbitrary pan,
tilt, scale, and rotation (both in plane and depth).
Unfortunately, such variability is common in the
objects that we see scattered throughout our environ-
ment. In some cases (see figure 1(a)) it may be diffi-
cult for even the most robust visual object recognition
approach to recognize an object. What results is a de-
graded performance from the object recognition sys-
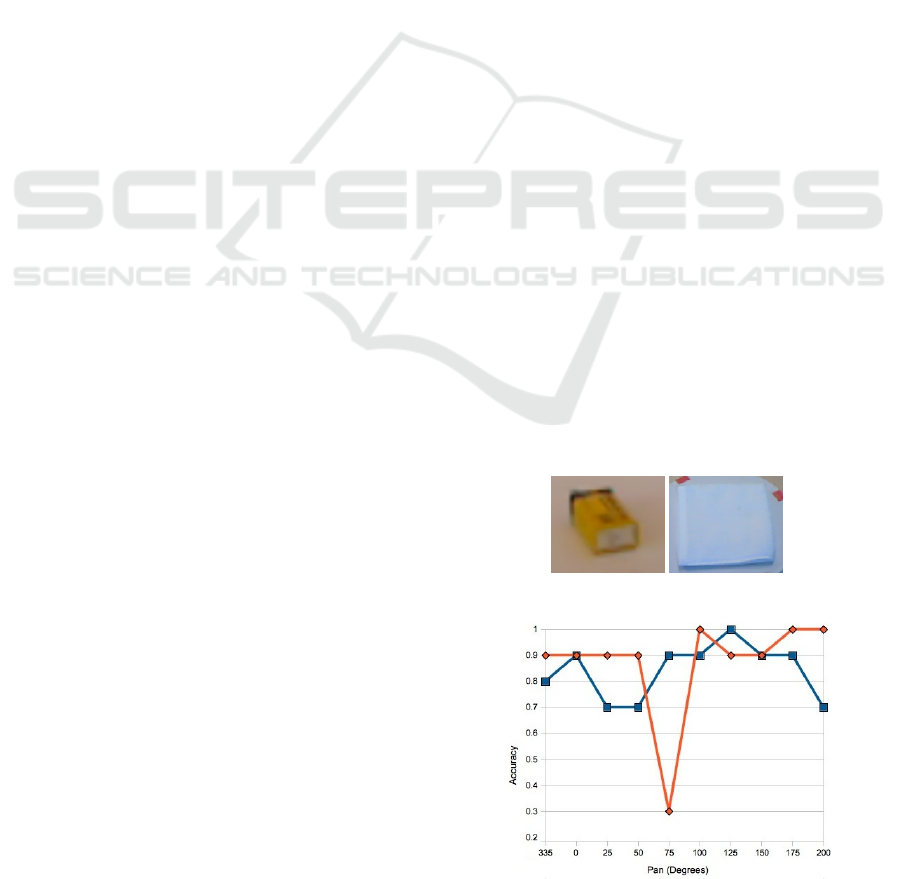
tem. Figure 1(a) shows two objects from the RGB-D
dataset. From left to right the objects are a dry bat-
tery, and a hand towel. However, in both cases, the
object classes could be mistaken with similar classes.
For example, the dry battery could easily be mistaken
for a flashlight or a pack of chewing gum. The hand
towel could easily be confused for a 3 ring binder.
Figure 1(b) shows the accuracy of Leabra (de-
scribed further Section 3.1) recognizing a dry battery
over a range of different pan angles, with a slightly
different camera tilt. While performance is generally
good, there is a point at which performance drops sig-
nificantly. A system that had been recognizing objects
with an accuracy of about 90% suddenly decreases to
an accuracy of 30% when the pan and tilt of the ob-
ject modified. An image from this region is shown in
figure 1(a).
(a) Challenging Examples from the RGB-D
dataset.
(b) Recognizing the Dry Battery using a State-of-the-Art
Approach
Figure 1: Images from the RGB-D dataset.
The strategy of improving object recognition
through multiple viewpoints is referred to as active
309
Lawson W. and Trafton J..
Unposed Object Recognition using an Active Approach.
DOI: 10.5220/0004285503090314
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 309-314
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

object recognition (D. Wilkes, 1992). Several ((Den-
zler and Brown, 2002; Farshidi et al., 2009; LaPorte
and Arbel, 2006)) have proposed probabilistic frame-
works for active object recognition. These frame-
works serve to both incorporate multiple viewpoints
as well as incorporating prior probability. However,
most have been evaluated on only a small number
of objects, using simple recognition schemes chosen
specifically to highlight the benefits of active recogni-
tion.
We demonstrate the benefit of active object recog-
nition to improve the results of a state-of-the-art ap-
proach, specifically, to improve in areas where per-
formance is affected by the pose of an object. We
recognize objects using Leabra
1
, which is a cogni-
tive computational neural network simulation of the
visual cortex. The neural networks have hidden layers
designed to mimic the functionality of the primary vi-
sual cortex (V1), the visual area (V4), and the inferior
temporal cortex (IT) . We extend Leabra by adding
a confidence measure to resulting classification, then
use active investigation when necessary to improve
recognition results.
We demonstrate the performance on our system
using the RGB-D (Lai et al., 2011) database. The
RGB-D contains a full 360
◦
range of yaw, and three
levels of pitch. We perform active object recognition
on 115 instances of 28 object classes from the RGB-D
dataset.
The remainder of the paper is organized as fol-
lows. We present related work in the field of active
object recognition in Section 2. We discuss our ap-
proach in Section 3, then present experimental results
in Section 4 with concluding remarks in Section 5.
2 RELATED WORK
Wilkes and Tsotsos’ (D. Wilkes, 1992) seminal work
on active object recognition examined 8 origami ob-
jects using a robotic arm. The next best viewpoint
was selected using a tree-based matching scheme.
This simple heuristic was formalized by Denzler and
Brown (Denzler and Brown, 2002) who proposed an
information theoretic measure to select the next best
viewpoint. They use average gray level value to rec-
ognize objects, selecting the next pose in an optimal
manner to provide the most information to the current
set of probabilities for each object. They fused results
using the product of the probabilities, demonstrating
their approach on 8 objects.
Jia et al (Jia et al., 2010) demonstrated a slightly
1
http://grey.colorado.edu/emergent/
different approach to information fusion, using a
boosting classifier to weight each viewpoint accord-
ing to the importance for recognition. They used a
shape model to recognize objects, using a boosted
classifier to select the next best viewpoint. They rec-
ognized 9 objects in multiple viewpoints with arbi-
trary backgrounds.
Browatzki et al. (Browatzki et al., 2012) used an
active approach to recognize objects on an iCub hu-
manoid robot. Recognition in this case was performed
by segmenting the object from the background, then
recognizing the object over time using a particle filter.
The authors demonstrated this approach to recognize
6 different cups with different colored bottoms.
3 METHODOLOGY
We use Leabra to recognize objects (section 3.1).
Once an object has been evaluated by Leabra, we find
both the object pose (section 3.2), and attach confi-
dence to the resulting classification (section 3.5). Fi-
nally, when the resulting classification has low confi-
dence, we actively investigate (section 3.6).
3.1 Leabra
The architecture of a Leabra neural network is broken
into three different layers, each with a unique func-
tion. The V1 layer takes the original image as input,
then uses wavelets (Gonzalez and Woods, 2007) at
multiple scales to extract edges. The V4 layer uses
these detected edges to learn a higher level representa-
tion of salient features (e.g., corners, curves) and their
spatial arrangement. The features extracted at the V1
layer includes multiple scales, therefore features ex-
tracted in the V4 layer have a sense of the large and
small features that are present in the object. The V4
layer also collapses on location information, provid-
ing invariance to the location of the object in the orig-
inal input image. The V4 layer feeds directly into the
IT activation layer, which has neurons tuned to spe-
cific viewpoints (or visual aspects) of the object.
3.2 Visual Aspects
Object pose plays an important role in recognition.
We consider pose in terms of visual aspects (Cyr and
Kimia, 2004; ?) (see figure 2). When an object under
examination is viewed from a slightly different angle,
the appearance generally should not change. When
it does not, we refer to this as a “stable viewpoint”,
both the original and the modified viewpoint belongs
to the same visual aspect V
1
. However, if this small
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
310
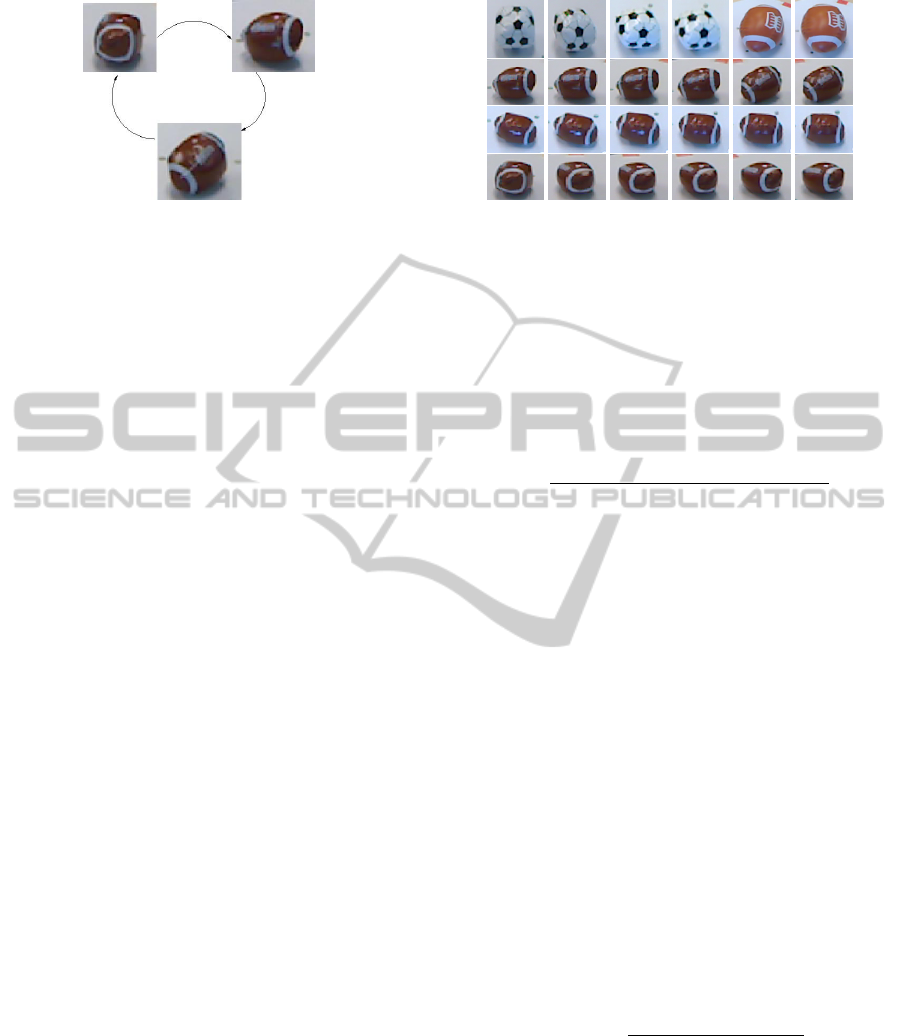
Figure 2: An example of visual aspects from one level of
pitch. The images show different visual aspects, and the
arrows show how each of these visual aspects are connected.
change in viewing angle affected the appearance of
the object, we would call this an “unstable viewpoint”
representing a transition between two different visual
aspects V
1
, and V
2
.
The human brain stores pose in a similar manner.
Neurophysiological evidence suggests that the brain
has view-specific encoding (Kietzmann et al., 2009;
?). In this encoding scheme, neurons in the IT cor-
tex activate differently depending on how an object
appears. Referring to Figure 2, when we look at the
football in the first visual aspect, a certain set of neu-
rons in the IT layer activate. When we look at the
football in the second visual aspect, a different set of
neurons activate.
To find visual aspects, we use the IT layer in the
Leabra neural network. We find visual aspects using
unsupervised learning, clustering IT activations. We
describe this process in section 3.3.
3.3 Finding Aspects
Classifying an object using a Leabra network pro-
duces a set of neurons that have been activated in the
IT layer. Leabra contains a total of 210 neurons in this
layer, with similar activation patterns occurring when
an object is viewed in a similar pose. We group ac-
tivation patterns using unsupervised learning through
k-means clustering (Duda et al., 2000).
Some care must be taken to establish the number
of clusters, k, since this is synonymous with the num-
ber of visual aspects of an objects. This number is
variable depending on the complexity of the object.
For example a simple, uniformly colored, perfectly
symmetric object such as a ball would only have one
aspect. That is, a change in viewing angle will never
affect the appearance of the object. Contrast this with
a more complicated object, such as an automobile. An
automobile would likely have a great number of vi-
sual aspects because of its complex structure.
The value of k cannot be estimated a priori, so we
set this value using a heuristic based on viewpoint sta-
Figure 3: Four different visual aspects found using cluster-
ing.
bility. A small change in viewpoint (δ) should gener-
ally not result in a new visual aspect. Therefore, when
the correct value of k has been found, all of the ele-
ments resulting clusters (cl) will mostly all belong to
stable viewpoints. We determine the quality of the
clustering using the hueuristic shown in Eq. 1, where
c represents a cluster.
m(c) =
∀
i∈c
|cl(pose(i)) = cl(pose(i) + δ)|
|c|
(1)
To determine the correct number of visual aspects,
we set k to a large number, then evaluate each result-
ing cluster. If the majority of the elements of any
cluster do not belong to stable viewpoints, k is de-
creased, then the process is repeated. Some visual
aspects from different object classes are shown in fig-
ure 3.
3.4 Distinctiveness of Visual Aspects
A basic tenet of active object recognition is that some
viewpoints have greater distinctiveness than others. In
this section, we establish the distinctiveness of each
visual aspect using STRoud (Barbara et al., 2006), a
test which evaluates the distinctiveness (or conversely
“strangeness”) of the members of each class. The
strangeness of a member (m) is evaluated using the ra-
tio of the distance to other objects of that class c over
the distance to all points of other classes c
−1
(Eq. 2).
In practice, we evaluate this by selecting the k small-
est distances.
str(m, c) =
∑
K
i=1
distance
c
(i, m)
∑
K
i=1
distance
c
−1
(i, m)
(2)
The sum of the distance to objects in the same
class c should be much smaller than the sum of the
distances to other classes c
−1
. Therefore, a distinctive
data point would have very low strangeness. When
referring to visual aspects (s), the probability that we
have correctly identified object (o) in visual aspect s
is determined using
UnposedObjectRecognitionusinganActiveApproach
311
p(s|o) =
|∀
i∈s
str(i, s) ≤ str(o, s)|
|s|
(3)
3.5 Recognition from a Single
Viewpoint
To recognize object o, we use the IT activation pattern
from Leabra (a), then compare this against known
classes. We compute the strangeness that the object
belongs to each class using Eq. 2. The probability of
recognition is conditionally dependent upon the dis-
tinctiveness of the visual aspect s, as well as the con-
fidence that the object belongs to visual aspect s. The
probability that we have recognized an object of class
o is p(o
ix
|a
x
s
x
), for object i using image x.
p(o
ix
|a
x
, s
x
) = p(o
ix
|a
x
)p(o
ix
|s
x
) (4)
p(o
ix
|a
x
) = αp(a
x
|o
ix
)p(o
ix
) (5)
p(o
ix
|s
x
) = αp(s
x
|o
ix
)p(o
ix
) (6)
Eq. 5 can be interpreted as the probability that we
have observed the object given a particular activation
pattern. If the activation pattern observed is quite sim-
ilar to known activation patterns for object o
i
, we ex-
pect the probability to be high. Similarly, eq. 6 can
be interpreted as the general confidence of recogniz-
ing object o in estimated visual aspect s. Combining
the two (eq. 4) produces a uncertainty measure that
accounts for both similarity of activation patterns as
well as the confidence in the visual aspect.
3.6 Active Recognition
When confidence is low, a single image may not be
sufficient to correctly recognize the object. In these
cases, we make a small local movement to view the
object from a slightly different perspective, then com-
bine the measurements. The probability that the ob-
ject belongs to class i, as was suggested in (Denzler
and Brown, 2002), is estimated using the product of
all measurements that have been taken over time (n).
This also has the potential for incorporating a prior
probability, which we have set to a uniform probabil-
ity.
p(i) =
n
∏
x=1
p(o
ix
|a
x
, s
x
) (7)
4 EXPERIMENTAL RESULTS
We experimentally validate our approach using the
RGB-D dataset (Lai et al., 2011). This particular
dataset was selected due to its large number of object
classes, many instances of each class, and the range
of poses where each instance was imaged. A few ex-
amples of training images are in Figure 5. Our exper-
iments are conducted using 115 instances of 28 object
classes. RGB-D has images of objects when viewed
from three different levels of camera pitch, rotating
the object a full 360
◦
at each pitch level. We use 39
randomly selected images per object for training (ap-
proximately 5% of the images). One third of the re-
maining images were used for validation, the remain-
ing images are used for testing (52,404 images).
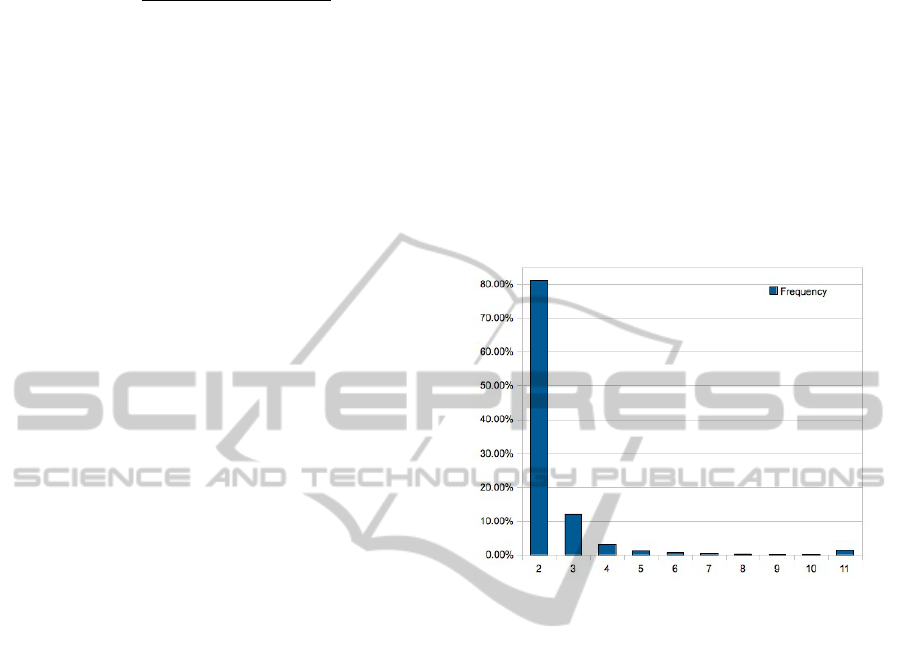
Figure 4: Frequency and number of positions used during
the active object recognition process.
We extract the object using the foreground mask
provided in the RGB-D dataset. The foreground mask
represents the part of the region that is not on the
table, as estimated using the Depth information pro-
vided by the Kinect. The size of the object was nor-
malized in the same manner as was previously de-
scribed in (Pinto et al., 2008). The purpose of fore-
ground extraction and size normalization is to remove
irrelevant size cues and to provide a measure of scale
invariance.
Table 1 shows the recognition rates for Leabra
(i.e., single viewpoint or static object recogni-
tion), and active object recognition. Active object
recognition has been set for very high confidence
(p=0.99999) and therefore will only recognize an ob-
ject when it is extremely confidence in the results.
Note that this is a confidence on a decision-level ba-
sis, and does not necessarily predict the overall per-
formance of the system, as performance is driven by
the variability of the testing data.
During active investigation, on average, objects
are examined at 2.4 positions before they are recog-
nized. The frequency of the positions used during ex-
amination are shown in 4.
Across all of the objects, the static approach has
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
312
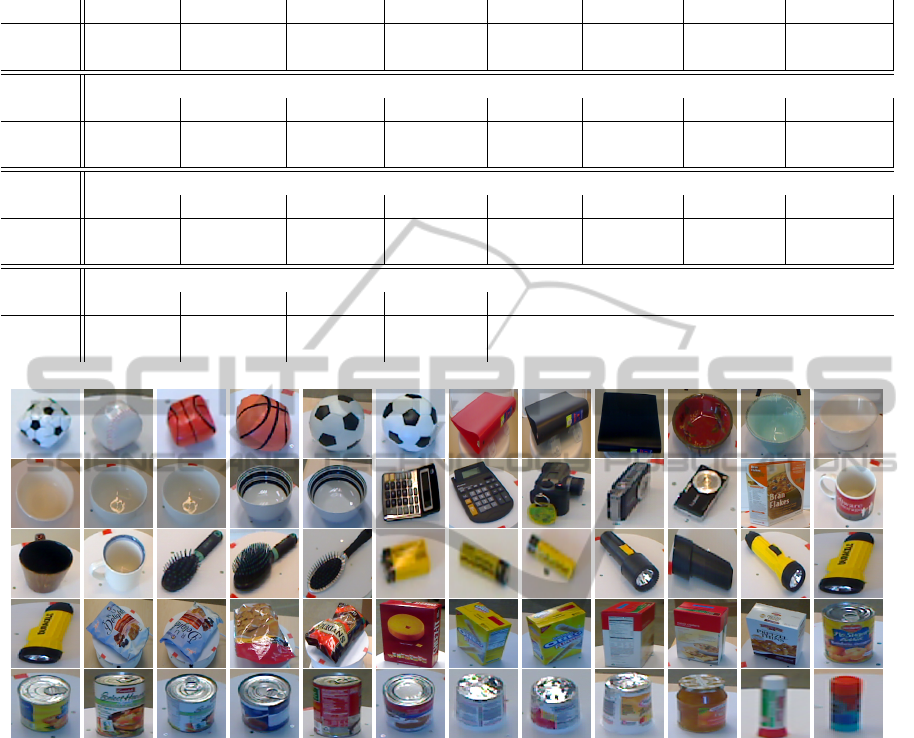
Table 1: Object Recognition Results.
object ball binder bowl calculator camera cellphone cerealbox coffeemug
Leabra 95.04% 88.92% 97.80% 84.46% 69.95% 93.47% 77.64% 94.68%
Active 97.30% 96.54 % 99.92% 93.80% 87.98% 91.84% 96.15% 97.68%
comb drybattery flashlight foodbag foodbox foodcan foodcup foodjar
Leabra 86.77% 96.50% 91.65% 82.93% 93.51% 96.38% 94.00% 63.07%
Active 94.06% 100.00% 98.68% 98.29% 99.69% 99.79% 99.19% 79.02%
gluestick handtowel keyboard kleenex lightbulb marker notebook pitcher
Leabra 98.97% 80.55% 76.49% 83.63% 91.80% 96.06% 90.93% 80.62%
Active 99.87% 98.92% 85.30% 96.76% 99.01% 98.92% 97.86% 98.12%
plate pliers scissors sodacan
Leabra 99.90% 96.62% 93.61% 97.85%
Active 99.90% 98.63% 98.99% 94.22%
Figure 5: Examples of training images from the RGB-D dataset.
a precision of 90.55%, and the active approach has a
precision of 96.81%. Furthermore, the standard devi-
ation of precision varies greatly with the approaches.
The standard deviation for static is 9.27%, the active
approach is 4.95%. This indicates that not only is the
accuracy of the system improving, but the number of
objects with a low level of accuracy is also improving.
5 DISCUSSION
State-of-the-art approaches to object recognition have
been demonstrated to perform very well on posed ob-
jects. We have shown that unposed objects can be
more difficult to recognize, particularly in degener-
ate viewpoints. Further, an active strategy can boost
the performance of the system even when considering
a simple approach to next best viewpoint selection.
Using only a random movement strategy, we demon-
strated a 6% boost in improvement without signifi-
cantly impacting the recognition speed of the system
(requiring only 2.4 positions on average).
ACKNOWLEDGEMENTS
This work was partially supported by the Of-
fice of Naval Research under job order num-
ber N0001407WX20452 and N0001408WX30007
awarded to Greg Trafton. Wallace Lawson was also
funded by the Naval Research Laboratory under a
Karles Fellowship.
UnposedObjectRecognitionusinganActiveApproach
313

REFERENCES
Barbara, D., Domeniconi, C., and Rodgers, J. (2006). De-
tecting outliers using transduction and statistical test-
ing. 12th ACM SIGKDD International Conference on
Knowledge Discovery and Data Mining.
Browatzki, B., Tikhanoff, V., Metta, G., Bulthoff, H., and
Wallraven, C. (2012). Active object recognition on a
humanoid robot. In IEEE International Conference on
Robotics and Automation.
Cyr, C. and Kimia, B. (2004). A similarity-based aspect-
graph approach to 3d object recognition. International
Journal of Computer Vision, 57(1).
D. Wilkes, J. T. (1992). Active object recognition. In Com-
puter Vision and Pattern Recognition (CVPR).
Denzler, J. and Brown, C. (2002). Information theoretic
sensor data selection and active object recognition and
state estimation. IEEE. Trans. on Pattern Analysis and
Machine Intelligence, 24(2).
Duda, R., Hart, P., and Stork, D. (2000). Pattern Classifica-
tion. Wiley Interscience.
Farshidi, F., Sirouspour, S., and Kirubarajan, T. (2009). Ro-
bust sequential view planning for object recognition
using multiple cameras. Image and Vision Comput-
ing.
Fei-Fei, L., Fergus, R., and Perona, P. (2004). Learning gen-
erative visual models from few training examples: An
incremental bayesian approach tested on 101 object
categories. In IEEE Conferece on Computer Vision
and Pattern Recognition.
Frank, M., Munakata, Y., Hazy, T., and O’Reilly, R. (2012).
Computational Cognitive Neuroscience.
Gonzalez, R. and Woods, R. (2007). Digital Image Process-
ing. Prentice Hall.
Jia, Z., Chang, Y., and Chen, T. (2010). A general boosting
based framework for active object recognition. British
Machine Vision Conference (BMCV).
Kietzmann, T. C., Lange, S., and Riedmiller, M. (2009).
”computational object recognition: A biologically
motivated approach”. Biol. Cybern.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-scale
hierarchical multi-view rgb-d object dataset. In Inter-
national Conference on Robotics and Automation.
LaPorte, C. and Arbel, T. (2006). Efficient discriminant
viewpoint selection for active bayesian recognition.
International Journal of Computer Vision, 68(3):267–
287.
Pinto, N., Cox, D., and DiCarlo, J. (2008). Why is real-
world visual object recognition hard? PLoS Compu-
tational Biology, 4(1).
Sebastian, T., Klein, P., and Kimia, B. (2004). Recognition
of shapes by editing their shock graphs. Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
26(5):550 –571.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
314
