
Pupil Localization by a Template Matching Method
Donatello Conte
1
, Rosario Di Lascio
2
, Pasquale Foggia
1
, Gennaro Percannella
1
and Mario Vento
1
1
University of Salerno, Via Ponte Don Melillo 1, 84084, Fisciano (SA), Italy
2
A.I. Tech srl, Via E. Capozzi 62, Avellino, Italy
Keywords:
Pupil Localization, Pupil Tracking, Template Matching.
Abstract:
In this paper, a new algorithm for pupil localization is proposed. The algorithm is based on a template matching
approach; the original contribution is that the model of the pupil that is used is not fixed, but it is automatically
constructed on the first frame of the video sequence to be examined. Therefore the model is adaptively tuned
to each subject, in order to improve the robustness and the accuracy of the detection. The results show the
effectiveness of the proposed algorithm.
1 INTRODUCTION
Among the different applications of biomedical im-
age processing, e.g. Mitotic HEp-2 cells recogni-
tion (Percannella et al., 2011) or Blood Vessel Seg-
mentation (Fraz et al., 2012), Eye Tracking plays an
important role both from the research and commer-
cial point of view. In fact Eye tracking is an impor-
tant component in many applications including hu-
man computer interaction, virtual reality, and diag-
nosis of some health problems. Abnormal eye move-
ments can be an indication of diseases such as balance
disorders, strabismus, etc.
Several technologies have been used for eye track-
ing, such as electrooculography (EOG) or flying-spot
lasers, but video-based eye tracking systems proved to
be the most effective. In particular, head mounted eye
tracking systems are more accurate than other kinds
of video-based systems.
Detecting the pupil is the most frequently used
method to track the horizontal and vertical eye po-
sition in video-based systems. If the detection can
be done accurately and robustly, then the eye orien-
tation can be determined from the pupil center coor-
dinates. Unfortunately, significant errors in the pupil
center computation may arise due to artifacts caused
by eyelids, eyelashes, corneal reflections, make-up,
etc.
Some attempts have been previously made to at-
tain a fast and accurate pupil center detection; in the
next section a brief survey on the subject is presented.
A common limitation of these approaches is that they
do not take into account the specificity of each ob-
served eye, and so may fail when they encounter
an eye with unusual characteristics (e.g. particularly
large or small pupil, shape not exactly elliptical etc.)
In this paper we propose a new, model-based, algo-
rithm for pupil center localization, which adapts auto-
matically to the characteristics of the observed pupil.
The remainder of the paper is organized as fol-
lows. In Section 2, we present some related works,
while in Section 3 we describe the proposed pupil lo-
calization method. Section 4 show the results of the
experimental phase and some conclusions are drawn
in Section 5.
2 RELATED WORKS
In the literature on pupil detection, a first group of
works (Boumbarov et al., 2009; Krishnamoorthy and
Indradevi, 2010) is based on the technique of active
contours. These methods assume that a parametric
model of the shape of the contour of the pupil is
known (usually an ellipse is used); then they employ
different algorithms for the iterative learning of the
chosen model parameters. Boumbarov et al. (Boum-
barov et al., 2009) propose the use of a Particle Filter;
the other approach works by minimizing an energy
function based on the gradient (Krishnamoorthy and
Indradevi, 2010).
A second group of works (Benletaief et al., 2010;
Kinsman and Pelz, 2011) starts from a characteriza-
tion of the pixels belonging to the pupil, and tries
to reconstruct the pupil region from a seed point,
by clustering adjacent pixels (Benletaief et al., 2010)
779
Conte D., Di Lascio R., Foggia P., Percannella G. and Vento M..
Pupil Localization by a Template Matching Method.
DOI: 10.5220/0004287907790782
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 779-782
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

or by using a probabilistic mixture model together
with the Expectation-Maximization algorithm (Kins-
man and Pelz, 2011).
Two other papers (S. Kim and Lee, 2011; Mo-
hammadi and Raie, 2011) work with a RGB cam-
era and first seek the iris contour, and then recognize
the boundary of the pupil, either through geometrical
properties (Mohammadi and Raie, 2011) or through
the use of artificial neural networks (S. Kim and Lee,
2011).
Finally, a large group of papers (Kolodko et al.,
2005; Yan et al., 2009) relies on the fact that the pupil
localization systems typically use infrared (IR) cam-
eras. In an IR image of the eye, the pupil is the darkest
region in the image. Therefore these works binarize
the initial image and perform a fitting of an ellipse
(with a minimum and maximum size) on the bina-
rized image contours. A variation of this scheme is
presented in some papers, e.g. (Kocejko et al., 2008),
which assume that the unique convex region result-
ing from binarization is the one corresponding to the
pupil; then they identify the center of the pupil as the
center of mass of the resulting region.
The methods of the first and second groups as-
sume that a seed point belonging to the pupil can be
easily and reliably found. The works that are based
on image binarization make the hypothesis that there
are no other elliptical regions in the image except the
one corresponding to the pupil.
These assumptions may fail in many cases, due to
the noise in the image, or because of the presence of
other dark elements similar to the pupil color (such
as the make-up), or due to non-perfect centering of
the eye in front of the camera. Furthermore, all these
methods cannot always recognize when the pupil is
not present (closed eye) or if it is partially visible be-
cause of the eyelids.
The basic idea of our proposal, which overcomes
the limits described above, is to build an appearance
model of the pupil, which is specific to the eye under
examination, and to search the portion of the image
most similar to the model. The model is constructed
(automatically) on the first frame of the sequence.
The method makes no assumptions on the position of
the pupil and therefore it is not based on an initial so-
lution. Furthermore, by performing a global search,
it is not deceived by regions that are circular but do
not correspond to the pupil. Finally, by including a
threshold on the similarity between model and image,
it can recognize when the pupil is not present in the
image.
3 THE PROPOSED METHOD
The main idea of the algorithm is to construct a model
for the pupil on the first frame of the sequence, and
then, for each succesive frame, to correlate the model
with the image in order to find the image region that
best matches with the model.
Given a template image of the pupil, for each
frame, the steps of the algorithm are described in the
following:
1. the image is thresholded with a fixed value (the
illumination system is such that the pixels color
of the pupil are always the darkest pixels in the
image);
2. a template matching (Brunelli, 2009) is applied
between the pupil model and the image in order
to find the position of maximum correlation;
3. starting from this position, the algorithm performs
a stabilization procedure in order to reduce the lo-
calization errors due to the noise in the image.
The correlation function used in the template
matching is:
R(x, y) =
∑
x
0
,y
0
(T (x
0
, y
0
) · I(x + x
0
, y + y
0
))
r
∑
x
0
,y
0
(T (x
0
, y
0
)
2
·
∑
x
0
,y
0
I(x + x
0
, y + y
0
)
2
where T denotes the template and I denotes the im-
age; the summation is done over template pixels
(x
0
, y
0
) ∈ T .
Because of the noise and of the distortions along
the edge of the region representing the pupil, the point
of maximum correlation does not coincide exactly
with the center of the pupil. For this reason a further
step is performed to find a more stable pupil center.
Starting from the maximum correlation position,
a contour finding algorithm is performed. Only
the largest contour is considered, assuming that the
smaller ones are due to noise. The found contour will
include part of the contour of the pupil, but it may
also include other borders (e.g. if the pupil is partially
covered by the eyelid). Thus, an ellipse is fitted to
the contour. The fitting is performed by calculating
the ellipse that fits (in a least-squares sense) the set of
2D contour points. Finally, the center of the ellipse is
taken as the pupil center.
Fig. 1 illustrates the steps described above: the
template matching finds a first, not necessarily opti-
mal, solution (Fig. 1a). Performing a search of the
contours in the considered region, the largest contour
corresponds to the pupil (Fig. 1b). Fig. 1c shows the
ellipse found after the execution of an ellipse fitting
algorithm, and Fig. 1d shows the new pupil center that
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
780
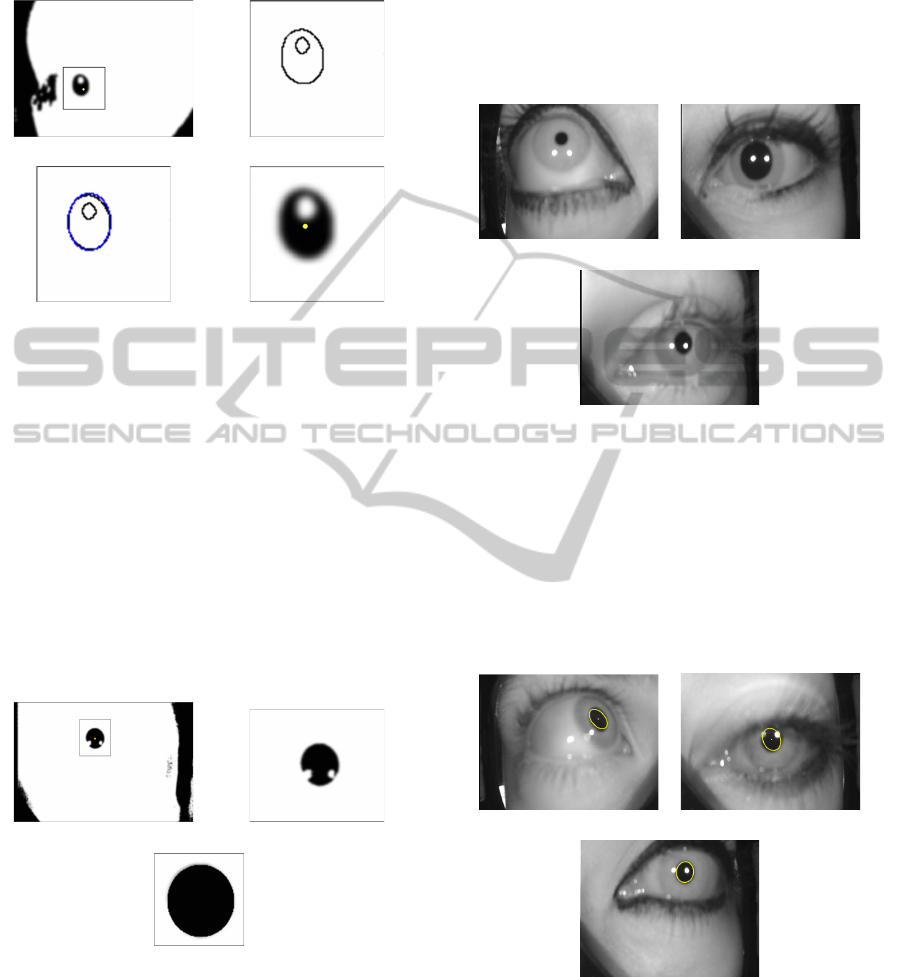
significantly improves the solution found by the tem-
plate matching alone.
a) b)
c) d)
Figure 1: a) First solution after the application of the tem-
plate matching. b) Contours finding on the considered re-
gion. c) Ellipse Fitting. d) Final solution.
The construction of the model of the pupil for
the considered video sequence is carried out on the
first frame, again with a method based on Template
Matching. However, in this case we use a set of pre-
defined templates. Starting from the point of maxi-
mum correlation, the actual region of the pupil is re-
constructed through a Region Growing Process (Pratt,
2007) on the binarized image, by using as a seed point
the solution resulting from Template Matching (See
Fig. 2 for an example). Once this region is found, it is
used as a template for subsequent frames.
a) b)
c)
Figure 2: a) Template Matching Solution. b) Region Grow-
ing Result. c) Final Pupil Model.
4 RESULTS
A set of 28 videos (from 14 different subjects) was
recorded to analyze the performance of the algorithm;
the videos were acquired using an IR camera mounted
on a mask worn by the subject. The average video
length was 450 frames; therefore about 13000 frames
were used in our experiments.
Of the 14 subjects, five were women, and four of
them had make-up (eye-liner). In Fig. 3 some sample
frames are shown.
a) b)
c)
Figure 3: Samples frames from the acquired dataset.
The sequences ground truth (exact pupil position)
for each frame of the video set has been manually de-
tected and recorded in a file. The frames in which
the eye was closed have been also noted in order to
evaluate the ability of the algorithm in detecting the
absence of a pupil in the image (because of the clos-
ing of the eyelid).
a) b)
c)
Figure 4: Samples frames in which the algorithm succeeds
in detecting pupil center.
Pupil detection outcomes can be broadly classified
into the following four possibilities:
• True Positives. The pupil has been detected cor-
rectly.
PupilLocalizationbyaTemplateMatchingMethod
781

Table 1: Obtained results of the proposed algorithm.
# frames # frames
TP TN FP FNopened closed
eyes eyes
13677 222 13062 152 568 130
• True Negatives. The algorithm identifies that
there was no pupil to be detected, e.g. the eye
closed.
• False Positives. The algorithm detects a pupil
where there is none in the image, or the detected
center is too distant (over a choosen threshold)
from the real one.
• False Negatives. The algorithm detects that there
is no pupil even though there is a clearly visible
pupil in the image.
a) b)
Figure 5: Samples frames in which the algorithm fails in
detecting pupil center.
Table 1 shows the incidence of such cases over the
frames of the collected dataset. In 95% of the frames,
the algorithm succeeds in detecting the pupil center or
in detecting a closed eye.
In Fig. 4 it is possible to see three examples in
which the algorithm succeeds in the detection of the
pupil center. The cases are particularly difficult due
to the large rotation of the eye (Fig. 4a) or because
of very long eyebrows (Fig. 4b) or very pronounced
makeup (Fig. 4c). Note also that because of the non
perfect adherence of the mask to the face, dark and
thick regions are present on the image borders: this
causes, in many algorithms, a failure to find the cor-
rect position of the pupil.
In Fig. 5 there are two cases in which the algo-
rithm fails: in the first case, due to the make-up, the
algorithm fails to recognize the closed ey,e while in
the second image, being very noisy, the shape of the
pupil is very distorted.
5 CONCLUSIONS
In this paper a new model-based algorithm for pupil
localization is presented. The algorithm overcomes
some common problems affecting other approaches
by constructing a model that is specific for the ob-
served subject. The experimental results show the ef-
fectiveness of the proposed algorithm.
Future work will be oriented to the use of a more
refined appearance model, incorporating probabilistic
elements, in order to improve the detection accuracy
for very noisy images and for the case in which the
pupil is largely occluded by the eyelid.
REFERENCES
Benletaief, N., Benazza-Benyahia, A., and Derrode, S.
(2010). Pupil localization and tracking for video-
based iris biometrics. In 10th Int. Conf. on Infor-
mation Science, Signal Processing and their Applica-
tions.
Boumbarov, O., Panev, S., Sokolov, S., and Kanchev, V.
(2009). Ir based pupil tracking using optimized parti-
cle filter. In IEEE International Workshop on Intelli-
gent Data Acquisition and Advanced Computing Sys-
tems: Technology and Applications.
Brunelli, R. (2009). Template Matching Techniques in Com-
puter Vision: Theory and Practice. Wiley.
Fraz, M., Remagnino, P., Hoppe, A., Uyyanonvara, B.,
Rudnicka, A., Owen, C., and Barman, S. (2012).
Blood vessel segmentation methodologies in retinal
images - a survey. Computer Methods and Programs
in Biomedicine, 108(1):407–433.
Kinsman, T. B. and Pelz, J. B. (2011). Towards a subject-
independent adaptive pupil tracker for automatic eye
tracking calibration using a mixture model. In IVMSP
Workshop: Perception and Visual Signal Analysis.
Kocejko, T., Bujnowski, A., and Wtorek, J. (2008). Eye
mouse for disabled. In Conf. on Human System Inter-
actions.
Kolodko, J., Suzuki, S., and Harashima, F. (2005). Eye-gaze
tracking: An approach to pupil tracking targeted to
fpgas. In Int. Conf. on Intelligent Robots and Systems.
Krishnamoorthy, R. and Indradevi, D. (2010). New snake
model for pupil localization using orthogonal polyno-
mials transform. In Int. Conf. on Machine Vision.
Mohammadi, M. R. and Raie, A. (2011). A novel tech-
nique for pupil center localization based on projective
geometry. In 7th Iranian Machine Vision and Image
Processing.
Percannella, G., Soda, P., and Vento, M. (2011). Mitotic
hep-2 cells recognition under class skew. Lecture
Notes in Computer Science, 6979:353–362.
Pratt, W. K. (2007). Digital Image Processing. John Wiley
& Sons.
S. Kim, B. H. and Lee, M. (2011). Gaze tracking based on
pupil estimation using multilayer perception. In Pro-
ceedings of International Joint Conference on Neural
Networks.
Yan, B., Zhang, X., and Gao, L. (2009). Improvement on
pupil positioning algorithm in eye tracking technique.
In International Conference on Information Engineer-
ing and Computer Science.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
782
