FlexRender: A Distributed Rendering Architecture for Ray Tracing
Huge Scenes on Commodity Hardware
Bob Somers and Zo
¨
e J. Wood
California Polytechnic University, San Luis Obispo, CA, U.S.A.
Keywords:
Rendering, Distributed Rendering, Cluster Computing.
Abstract:
As the quest for more realistic computer graphics marches steadily on, the demand for rich and detailed im-
agery is greater than ever. However, the current “sweet spot” in terms of price, power consumption, and perfor-
mance is in commodity hardware. If we desire to render scenes with tens or hundreds of millions of polygons
as cheaply as possible, we need a way of doing so that maximizes the use of the commodity hardware that we
already have at our disposal. We propose a distributed rendering architecture based on message-passing that
is designed to partition scene geometry across a cluster of commodity machines, allowing the entire scene to
remain in-core and enabling parallel construction of hierarchical spatial acceleration structures. The design
uses feed-forward, asynchronous messages to allow distributed traversal of acceleration structures and evalu-
ation of shaders without maintaining any suspended shader execution state. We also provide a simple method
for throttling work generation to keep message queueing overhead small. The results of our implementation
show roughly an order of magnitude speedup in rendering time compared to image plane decomposition, while
keeping memory overhead for message queuing around 1%.
1 INTRODUCTION
Rendering has advanced at an incredible pace in re-
cent years. At the heart of rendering is describing the
world we wish to draw, which has traditionally been
done by defining surfaces. While exciting develop-
ments in volume rendering techniques happen on a
regular basis, it is unlikely we will abandon surface
rendering any time soon. The champion of surface
representations in rendering, has been the polygonal
mesh. Even when used to store smooth surfaces in a
compressed way (as with subdivision surfaces), they
are usually tesselated into large numbers of fine poly-
gons for rendering. Since their representation is de-
fined explicitly, meshes with fine levels of detail have
significantly higher storage requirements. Thus, as
the demand for higher visual fidelity increases, the
natural tendency is to increase geometric complexity.
Graphics, and ray tracing in particular, has long
been said to be a problem that is embarrassingly par-
allel, given that many graphics algorithms operate
on pixels independently. Graphics processing units
(GPUs) have exploited this fact for years to achieve
amazing throughput of graphics primitives in real-
time. While processor architectures have become ex-
ceedingly parallel and posted impressive speedups,
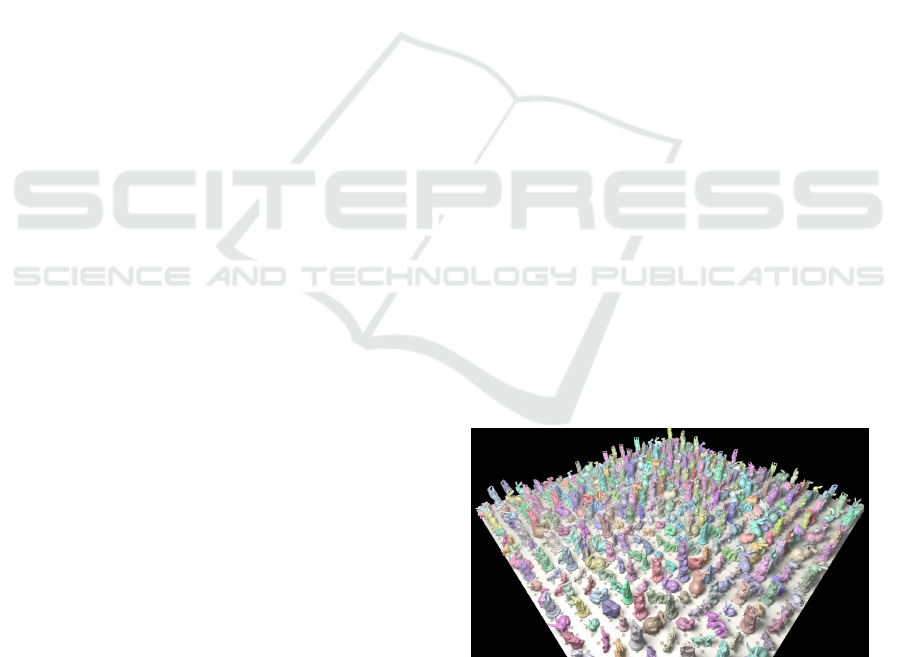
Figure 1: Field of high resolution meshes whose geometric
complexity is nearly 87 million triangles. Rendered across
4 commodity machines using FlexRender.
the memory hierarchy has not had time to catch up.
For a processor to perform well, the CPI, cycles per
instruction, must remain low to ensure time is spent
doing useful work and not waiting on data.
In current memory hierarchies, data access time
can take anywhere from around 12 cycles (4 nanosec-
onds for an L1 cache hit) to over 300 cycles (100
nanoseconds for main memory). Techniques such
as out-of-order execution are helpful in filling this
wasted time, but for memory intensive applications
it can be difficult to fill all the gaps with useful work.
Because of this fact, there is a lot more to paral-
152
Somers B. and J. Wood Z..
FlexRender: A Distributed Rendering Architecture for Ray Tracing Huge Scenes on Commodity Hardware.
DOI: 10.5220/0004289501520164
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 152-164
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

lel rendering than initially meets the eye. Graphics
may indeed by highly parallel, but its voracious ap-
petite for memory access is actively working against
its parallel efficiency on current architectures.
This paper presents FlexRender, a ray tracer de-
signed for rendering scenes with high geometric com-
plexity on commodity hardware. We specifically tar-
get commodity hardware because it currently has an
excellent cost to performance ratio, but still typically
lacks enough memory to fit large scenes entirely in
RAM.
Our work describes the following core contribu-
tions:
1. A feed-forward messaging design between work-
ers that passes enough state with every ray to
never require reply messages.
2. An approach to shading using this messaging de-
sign that does not require suspending execution of
shaders and maintaining suspended state.
3. An extension to a stackless BVH traversal algo-
rithm (Hapala et al., 2011) that makes it possible
to suspend traversal at one worker and resume it
at another.
4. A simple throttling method for managing memory
overhead for message queueing without resorting
to a complicated dynamic scheduling algorithm.
5. Technical insight into the challenges of building
such a renderer, an analysis of our results, and an
open-source implementation.
In particular, we show that FlexRender can
achieve speedups that are around an order of magni-
tude better than image plane decomposition for com-
modity machines, and can naturally self-regulate the
cluster of workers to keep the memory overhead due
to message queuing around 1% of each worker’s main
memory.
It is important to remember that FlexRender is
an experimental design, and some of our design
goals worked better than others. In the hopes of
making future experimentation easier for others, we
provide the complete source code of FlexRender at
http://www.flexrender.org.
2 BACKGROUND
FlexRender leverages observations from several fun-
damental building blocks, including Radiometry,
bounding volume hierarchies, and Morton coding.
Radiometry. For the purposes of FlexRender, we
note the following observations of the radiometry
model of light:
Light Behaves Linearly. The combined effect of
two rays of light in a scene is the same as the sum
of their independent effects on the scene.
Energy is Conserved. When a ray reflects off of a
surface, it can never do so with more energy than
it started with.
FlexRender exploits these observations in the follow-
ing ways:
The Location of Computation does not Matter. If
the scene is distributed across many machines, it
makes no difference which machine computes the
effect of a ray. The sum of all computations will
be the same as if all the work was performed on a
single machine.
Transmittance Models Energy Conservation. If
we store the amount of energy traveling along
a ray (the transmittance) with the ray itself, we
need not know anything about the preceding
rays or state that brought this ray into existence.
We can compute its contribution to the scene
independently and ensure that linearity and
energy conservation are both respected.
Bounding Volume Hierarchies. The traversal al-
gorithm of a BVH is naturally recursive, but recursive
implementations keep their state on the call stack. In
FlexRender, BVH traversal may need to be suspended
on one machine and resumed it on another, so all
of the traversal state needs to be explicitly exposed.
Refactoring it as an iterative traversal explicitly ex-
poses the state for capturing, but unfortunately it still
requires a traversal stack of child nodes that must be
visited on the way back up the tree. In FlexRender,
rays carry all necessary state along with them, and
this approach would require the entire stack to be in-
cluded as ray state.
However, (Hapala et al., 2011) presents a stack-
less traversal method. The key insight is that if parent
links are stored in the tree, the same traversal can be
achieved using a three-state automaton describing the
direction you came from when you reached the cur-
rent node (i.e. from the parent, from the sibling, or
from the child). They show that their traversal algo-
rithm produces identical tree walks and never retests
nodes that have already been tested.
FlexRender leverages this traversal algorithm due
to its low state storage requirements. Each ray only
needs to know the index of the current node it is
traversing and the state of the traversal automaton.
FlexRender:ADistributedRenderingArchitectureforRayTracingHugeScenesonCommodityHardware
153
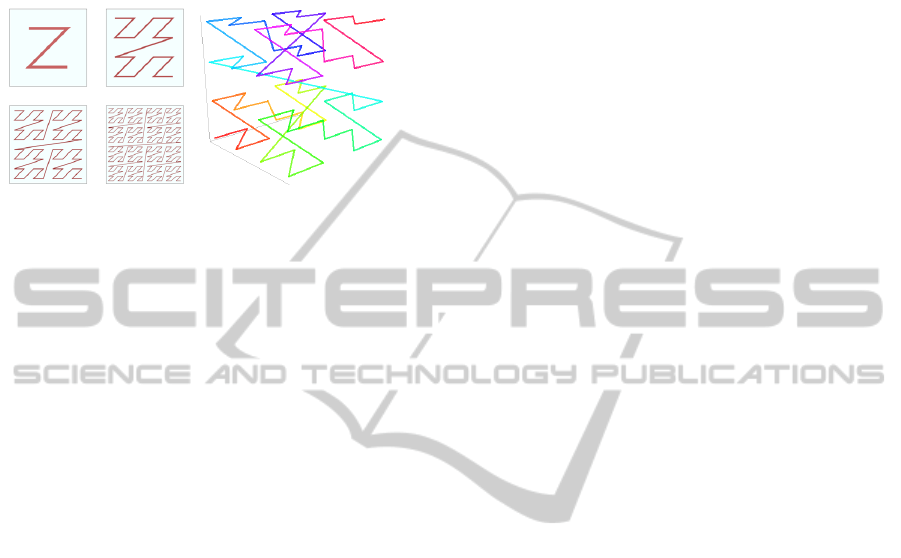
Morton Coding and the Z-Order Curve. Morton
coding is a method for mapping coordinates in multi-
dimensional space to a single dimension. In particu-
lar, walking the multidimensional space with a Mor-
ton coding produces a space-filling Z-order curve.
Figure 2: Examples of two dimensional and three di-
mensional Z-order curves. Credit: “David Eppstein” and
“Robert Dickau” (Creative Commons License).
More concretely, FlexRender needs to distribute
scene data to machines in the cluster, without a pre-
processing step, in a spatially coherent way. If the ge-
ometry on each machine consists of a localized patch
of the overall geometry, it allows us to minimize com-
munication between the machines, and thus, only pay
the network cost when absolutely needed.
Because the Morton coding produces a spatially
coherent traversal of 3D space, dividing up the 1D
Morton code address space among all the machines
participating in the render gives a reasonable assur-
ance of spatial locality for the geometry sent to each
machine.
The Morton coding is also simple to implement.
For example, to map a point P in a region of 3D
space (defined by its bounding extents min and max)
to a Morton-coded 64-bit integer, discretizing each
axis evenly allows for 21 bits per axis, yielding a 63-
bit address space (and one unused bit in the integer).
We compute the Morton code by calculating the 21-
bit discretized component of P along each axis, then
shifting the components from each axis into the 64-bit
integer one bit at a time from the most-significant to
least-significant bit.
3 RELATED WORK
A number of algorithms are designed to completely
avoid large amounts of geometry altogether. Dis-
placement maps (Krishnamurthy and Levoy, 1996)
and normal maps using texture data (Cohen et al.,
1998) and (Cignoni et al., 1998) are commonly used,
especially in real-time applications. However, normal
mapping displays visual artifacts, particularly around
the edges of the mesh or in areas where the tex-
ture is stretched or compressed. Similarly, level of
detail is commonly used to replace high resolution
meshes with lower resolution versions when they are
far enough away from the viewer (Clark, 1976). How-
ever, it requires the creation of multiple resolution
meshes and algorithms to smoothly handle resolution
changes.
More recently, (Djeu et al., 2011) provides a
framework for efficiently tracing multiresolution ge-
ometry, but it has large memory requirements and is
not applied to clusters of commodity machines. Sim-
ilarly (
´
Afra, 2012) presents a voxel-based paging sys-
tem designed for interactive use, but it requires an
expensive preprocessing step and displays visual ar-
tifacts at low LOD levels.
In (DeMarle et al., 2004), distributed shared mem-
ory is used to page in necessary data for rendering,
but it relies on a complicated task scheduler to avoid
flooding the network with large data blocks and it
suffers from cache storms in a multithreaded envi-
ronment. Efficient memory use is also the focus of
(Moon et al., 2010), which obtains an order of mag-
nitude speedup from reordering ray evaluation in a
cache-oblivious way. This approach would comple-
ment our method very well.
The focus of (Reinhard et al., 1999), was devel-
opment of a hybrid work scheduler which would im-
prove performance with more effective hardware uti-
lization, but it had problems with high memory over-
head. Earlier this year, (Navr
´
atil et al., 2012) pre-
sented an improved approach which uses a dynamic
scheduler to move work from an image plane decom-
position to a domain decomposition as rays begin to
diverge.
A similar approach to ours was presented in
(Badouel et al., 1994), but it failed to address the issue
of shader execution within their asynchronous clus-
ter design. Another similar approach is the Kilauea
renderer in (Kato and Saito, 2002), but its pipeline is
very latency sensitive and network communication is
heavy due to rays being duplicated across many work-
ers.
Recent research in strict out-of-core methods has
focused on techniques for using main memory as an
efficient cache. In (Kontkanen et al., 2011), they
present a technique for dealing with huge point clouds
used in point-based global illumination and demon-
strate impressive cache hit rates of 95% and higher.
Prior to that, (Pantaleoni et al., 2010) generated di-
rectional occlusion data using ray tracing, which was
compressed into spherical harmonics for evaluation at
render time. Ray tracing was not used for primary vis-
ibility. Like FlexRender, they also used hierarchical
BVHs, but for the purpose of chunking scene data into
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
154

units of work that could be loaded into main memory
quickly.
Using GPGPU techniques, (Garanzha et al.,
2011), presented a method for ray tracing large scenes
that are out-of-core on the GPU. Parts of their archi-
tecture are similar to FlexRender on a single-device
scale, specifically their use of hierarchical BVHs and
ray queues to handle rays cast from shaders. How-
ever, the global ray queue is fairly memory intensive,
potentially storing up to 32 million rays.
Leveraging MapReduce (Dean and Ghemawat,
2004), an implementation of a ray tracer was pre-
sented by (Northam and Smits, 2011), but sending
large amounts of scene data to workers significantly
slowed down processing. Their solution was to break
the scene into small chunks and resolve the inter-
section tests in the reduce step. Unfortunately, this
does a lot of unnecessary work, because many non-
winning intersections are computed that would have
been pruned in a typical BVH traversal.
4 FlexRender ARCHITECTURE
In general, rendering with FlexRender proceeds in the
following way:
1. Read in the scene data and define the maximum
bounding extents of the entire scene. As data is
read in, it is distributed to the workers using the
Morton coding.
2. Once the scene is distributed, workers build BVHs
in parallel for their respective local region of the
scene. When complete, they send their maximum
bounding extents to the renderer.
3. The renderer constructs a top-level BVH from
each of the workers’ bounds and sends this top-
level BVH to all the workers.
4. Workers create image buffers. All shading com-
puted on a worker is written to its own buffer.
5. Workers cast primary rays from the camera and
test for intersections.
• During intersection testing, rays may be for-
warded over the network to another worker if
they need to test geometry within the bounding
extents of that worker.
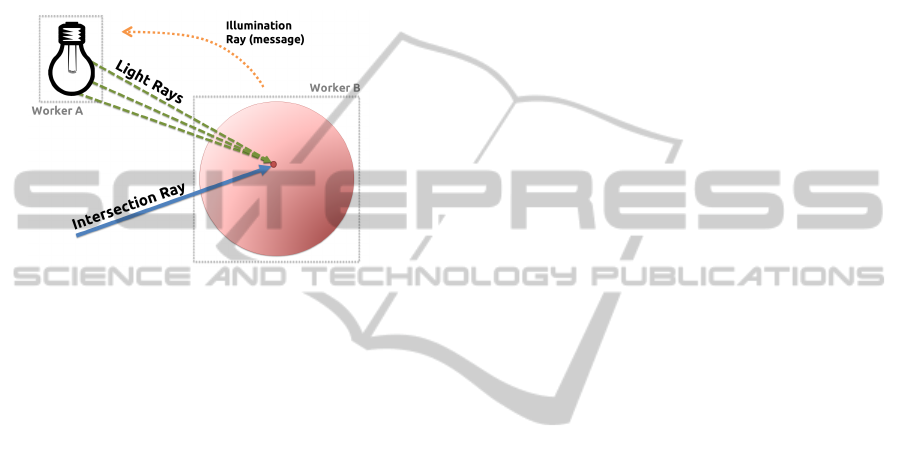
• Once the nearest intersection is found, illumi-
nation ray messages are created and sent to
workers that have lights. These workers send
light rays back towards the point of intersection
to test for occlusion.
• If the light rays reach the original intersection,
the point is illuminated and the worker com-
putes shading.
6. Once all rays have been accounted for, work-
ers send their image buffers back to the renderer,
which composites them together into a final im-
age.
In the next few sections, we will examine each part
of this process in greater detail.
4.1 Workers and the Renderer
There are two potential roles a machine can play dur-
ing the rendering process.
Worker. These machines receive a region of the
scene and act as ray processors, finding intersec-
tions computing shading. They produce an image
that is a component of the final render. There may
be an arbitrary number of workers participating.
Renderer. This machine distributes scene data to the
workers. Once rendering begins it monitors the
status of the workers and halts any potential run-
away situations (see Section 4.4.3). When the
renderer decides the process is complete, it re-
quests the image components from each worker
and merges them into the final image. There is
only a single renderer in any given cluster.
The network architecture is client/server con-
nected in a star topology. Each worker exposes a
server which processes messages and holds client
connections open to every other worker for pass-
ing messages around the cluster. The renderer also
holds a client connection to every worker for sending
configuration data, preparing the cluster for render-
ing (described in Section 4.3), and monitoring render
progress (described in Section 4.5).
The current implementation does not include any
provisions for fault tolerance. However, there is no ar-
chitectural restriction preventing such measures. For
topics involving the design of robust and resilient
clusters, we refer the reader to the distributed systems
literature.
The graphics machinery is fairly straightforward.
A scene consists of a collection of meshes, which are
stored as indexed face sets of vertices and faces. Each
mesh is a assigned a material, which consists of a
shader and potentially a set of bindings from textures
to names in the shader. A shader is a small program
that computes the lighting on the surface at a particu-
lar point.
FlexRender:ADistributedRenderingArchitectureforRayTracingHugeScenesonCommodityHardware
155

4.2 Fat Rays
The core message type in FlexRender is the fat ray.
They are so named because they carry additional state
information along with their geometric definition of
an origin and a direction. Their counterparts, slim
rays, consist of only the geometric components.
Specifically, a fat ray contains the following data,
which is detailed in the subsequent sections:
• The type of ray this is.
• The source pixel that this ray contributes to.
• The bounce count, or number of times this ray
has reflected off a surface (to prevent infinite
loops).
• The origin and direction of the ray.
• The ray’s transmittance, (related to the amount
of its final pixel contribution).
• The emission from a light source carried along the
ray, if any.
• The target intersection point of the ray, if any.
• The traversal state of the top-level BVH.
• The hit record, which contains the worker, mesh,
and t value of the nearest intersection.
• The current worker this ray should be forwarded
to over the network.
• The number of workers touched by the ray. (Not
used for rendering, only analysis.)
• A next pointer for locally queuing rays. (Obvi-
ously invalid over the network.)
In total, the size of a fat ray is 128 bytes.
4.3 Render Preparation
To begin rendering FlexRender ensures that all the
workers agree on basic rendering parameters, such
as the minimum and maximum extents of the scene,
which is used for driving Morton coding discretiza-
tion along each axis. Once this data has been synchro-
nized with all workers, each worker establishes client
connections with every other worker that remain open
for the duration of the render.
The renderer then divides up the 63-bit Morton
code address space evenly by the number of workers
participating and assigns ranges of the address space
(which translate into regions of 3D space) to each
worker. At this point the renderer begins reading in
scene data and takes the following actions with each
mesh:
1. Compute the centroid of the mesh by averaging its
vertices.
2. Compute the Morton code of the mesh centroid.
The range this falls in determines which worker
the mesh will be sent to.
3. Ensure that any asset dependencies (such as ma-
terials, shaders, and textures) for this mesh are
present on the designated worker.
4. Send the mesh data to the designated worker.
5. Delete the mesh data from renderer memory.
Although the current implementation reads scene
data in at the renderer and distributes it over the net-
work, there is no inherent reason why it needs to do
so. For example, if all workers have access to shared
network storage, the renderer could simply instruct
each worker to load a particular mesh itself, reducing
load time.
4.3.1 Parallel Construction of Bounding Volume
Hierarchies
Next, workers construct a BVH for each mesh
they have for accelerating spatial queries against the
meshes. While building each BVH, the worker tracks
bounding extents of each mesh. Workers then build a
root BVH for the entire region owned by the worker
with the mesh extents as its leaf nodes. When testing
for intersections locally, a worker first tests against
this root BVH to determine candidate meshes, then
traverses each mesh’s individual BVH to compute ab-
solute intersections. After construction of this root
BVH, the root node’s bounding extents describe the
spatial extent of all geometry owned by the worker.
Once construction of all local BVHs is complete,
workers send their root bounding extents to the ren-
derer. The renderer then constructs a final top-level
BVH with worker extents as its leaf nodes. This top-
level BVH is then distributed to all workers. This is
a quick and lightweight process, since the number of
nodes is only 2n − 1, where n is the number of work-
ers. This top-level BVH guides where rays are sent
over the network in Section 4.4.4.
4.4 Ray Processing
Workers are essentially multithreaded ray processors.
Their general work consists of processing rays by test-
ing for intersection, potentially forwarding rays to an-
other worker, or computing shading values if a ray
terminates.
To manage these various tasks when all the geom-
etry and lights may not be local to the worker, there
are three different types of rays:
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
156
• Intersection rays are very much like traditional
rays, which identify points in space that require
shading.
• Illumination ray messages are copies of inter-
section rays that have terminated. They are sent
to workers who have emissive geometry and as-
sist in the computation of shading.
• Light rays are Monte Carlo samples that con-
tribute direct illumination to a point being shaded.
Figure 3: The three different ray types and their interac-
tions.
The typical lifetime of these various rays is as follows:
1. An intersection ray is cast into the scene.
2. When that intersection ray terminates at a point in
space, it dies and spawns an illumination ray mes-
sage sent to each worker with emissive geometry.
3. When those illumination ray messages are deliv-
ered, they die and spawn light rays cast toward the
original intersection.
4. If they terminate at the original intersection, the
worker computes shading for it. When those light
rays terminate, they die.
A single intersection ray can spawn many addi-
tional rays and light rays are the most likely to ter-
minate without generating additional rays. These are
key factors for deciding ray processing order for the
cluster.
4.4.1 Illumination
In FlexRenderer there is no special “light” type, only
meshes that are emissive, which is a property set by
the assigned material. Emissive meshes are known to
inject light into the scene through their shader. During
scene loading, the renderer maintains a list of workers
that have been sent at least one emissive mesh and
sends the list to all workers before rendering begins.
Once intersection testing has identified a point
needing shading, FlexRender must determine the vis-
ibility of light sources from that point. In a traditional
ray tracer, shadow rays are cast from the point of in-
tersection to sample points on the surface of the light
to determine visibility. However, from the perspective
of the worker computing shading, it has no idea where
the lights in the scene are, or if there is any geometry
occluding the light, it just knows which workers have
emissive meshes.
To solve this problem, illumination ray messages
are used to request that emissive meshes instead test
for visibility from their perspective. In this way,
FlexRender traces an equivalent of shadow rays but
in the opposite direction, which we call light rays. In-
stead of originating at the intersection point and trav-
eling in the direction of the light, they originate at
the light and travel in the direction of the intersec-
tion point. Area lights are supported through Monte
Carlo integration by creating multiple light rays with
origins sampled across the surface of the light.
If a light ray returns to the original intersection
point after being traced through the cluster, which can
be determined via the information carried forward in
the fat rays, the renderer knows its path from the light
was unoccluded. The advantage of this method is that
it leverages the same method for tracing rays through
a distributed BVH that used for testing ray intersec-
tions.
In summary, illuminating an intersection is done
as follows:
1. On the worker where an intersection was found,
copy the ray data into an illumination ray message
with the target set to the point of intersection.
2. Send the illumination ray message to all emissive
workers.
3. When a worker receives an illumination ray mes-
sage, generate sample points across the surface of
all emissive meshes. Set these sample points as
the origins for new light rays.
4. Set the directions of all the light rays such that
they are oriented in the direction of the target.
5. Push each light ray into the ray queue and let the
cluster process them as usual.
4.4.2 Ray Queues
To manage the various types and numerous rays
present in the system, each worker has a ray queue,
with typical push and pop operations. Internally, this
is implemented as three separate queues, where rays
are separated by type. It also contains information
about the scene camera, for generating new primary
rays. When a new ray arrives at a worker, it is im-
mediately pushed into the queue according to its type
(intersection, illumination, or light).
FlexRender:ADistributedRenderingArchitectureforRayTracingHugeScenesonCommodityHardware
157

When the worker pops a ray from the queue, rays
are pulled from the internal queues in the following
order:
1. The light queue, since these are least likely to
generate new rays.
2. If the light queue is empty, the worker pops from
the illumination queue, since these will generate
a limited number of new rays.
3. If the illumination queue is empty, the worker
pops from the intersection queue, since these can
generate the most new rays.
4. If all of the internal queues are empty, the worker
uses the camera to cast a new primary ray into the
scene
Processing rays as a priority queue is essential
for managing the exponential explosion of work than
can occur if too many primary rays enter the system
at once. It also helps reduce memory required for
queuing because new work is not generated until the
worker has nothing else to work on.
4.4.3 Primary Ray Casting
To give the cluster the ability to regulate itself, each
worker in the cluster is responsible for casting a por-
tion of the primary rays in the scene. Consider the
case where a worker has not received any work re-
cently from other workers in the cluster for whatever
reason. By giving the worker control over primary ray
casting for a portion of the scene, we enable workers
to generate work when they have nothing to do.
However, in the case where a worker contains
mostly background geometry, it will infrequently re-
ceive work from others because its size in screen
space is small, yet it is in charge of casting primary
rays for a larger slice of the image. In this case the
worker may go on an unfettered spree of primary ray
casting, generating lots of work for others and little
for itself. To prevent this “runaway” case from over-
burdening the ray queues, workers report statistics
about their progress to the renderer occasionally (10
times per second in our implementation). If a worker
is getting significantly further ahead of the others in
primary ray casting, the renderer temporarily disables
primary ray casting on that worker.
This is not ideal, since lightly loaded workers will
wait idle until they receive work to do, but it is sim-
ple to implement and works remarkably well in prac-
tice for mitigating the ray explosion and associated
memory required for message queueing. See (Rein-
hard et al., 1999) and (Navr
´
atil et al., 2012) for more
sophisticated approaches that use dynamic scheduling
to increase performance.
4.4.4 Distributed BVH Traversal
Distributed traversal of the scene BVH happens at two
levels. Recall that the top level BVH contains bound-
ing boxes for each worker and is present on all work-
ers. Below that, each worker contains a BVH consist-
ing of only the mesh data present on that worker.
When a ray is generated, traversal begins at the
root of the top level tree and proceeds as described by
(Hapala et al., 2011). When a leaf node intersection
occurs closer to the camera than the current closest
intersection, the traversal state is packed into the ray
and the ray is forwarded to the candidate worker. The
packed traversal state includes the index of the cur-
rent top-level node and the state of the traversal au-
tomaton (from the parent, from the sibling, or from
the child). The logic for top-level traversal is shown
in Algorithm 1.
Algorithm 1: Top-level BVH traversal.
while current node ! = root do
if ray intersects leaf node then
if leaf node t < ray t then
pack traversal state into ray;
send ray to leaf node worker;
end
end
end
When a ray is received over the network and un-
packed at the next worker, the traversal state is exam-
ined. If the traversal state points to the root of the top-
level tree, the scene traversal has completed and the
worker can shade the intersection if it was the worker
on which that intersection occurred. Otherwise, the
ray must be forwarded to the worker who won, since
that worker has the shading assets.
If the traversal state is not at the root, the worker
tests the ray against its local mesh BVH to find the
closest intersection on this worker. If the result of
that test is closer to the camera than the current clos-
est intersection, the worker updates the hit record of
the ray and resumes traversal of the top-level BVH by
reinstating the traversal state packed into the ray and
continuing where it left off. This logic is shown in
Algorithm 2.
In the best case, a ray is generated on, intersects
only with, and is shaded on a single worker. These
rays never need to touch the network. In the worse
case, the ray potentially intersects with all nodes, so
it must touch every node in the tree.
In addition, there are two interesting corner cases
to consider.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
158

Algorithm 2: Worker-level BVH traversal.
if ray traversal state == root then
if winning worker == this worker then
shade;
else
send ray to winning worker;
end
else
test for intersections against worker BVH;
if worker t < ray t then
write hit record into ray;
end
resume top-level traversal;
end
• If the ray is generated on a node that it does not
intersect until later in the traversal, it consumes
one additional network hop at the very beginning
of the traversal.
• If the ray completes its traversal on a worker dif-
ferent from that which had the closest intersec-
tion, it consumes one additional network hop at
the end of the traversal to put the ray on the cor-
rect worker for shading.
Thus, the worst case scenario actually touches n +
2 workers, where n is the number of workers in the
cluster.
We discuss possible optimizations that may elim-
inate both of these corner cases in the Future Work
Section. Additionally in Section 5, we show that in
practice, the number of workers that each ray touches
is less than or equal to the theoretical O(log n) per-
formance of the binary tree for the majority of rays in
the scene.
4.4.5 Shading
When a light ray arrives at a worker, it checks that
its point of intersection is within some epsilon of the
target. If it is, the worker considers the light sample
visible, looks up the material, shader, and textures for
the mesh, and runs the shader. The shader is responsi-
ble for writing its computed values into the worker’s
image buffer.
A shader may do any (or none) of the following:
• Sample textures.
• Compute light based on a shading model.
• Accumulate computed light into image buffers.
• Cast additional rays into the scene.
When new rays are cast into the scene from a
shader, the results of that cast are not immediately
available. Instead, the cast pushes the new rays into
the queue for processing and the traversal and shading
systems ensure that the result of secondary and n-ary
traced rays will be included in the final image. The
source pixel of the new ray is inherited from its par-
ent to ensure that it contributes to the correct pixel in
the final image. In addition, the desired transmittance
along the new ray is multiplied with the transmittance
of the parent ray to ensure energy conservation is pre-
served.
4.5 Render Completion
In a traditional recursive ray tracer, determining when
the render is complete is a simple task: When the last
primary ray pops its final stack frame the render is
over. In FlexRender, however, no one worker (or the
renderer, for that matter) knows where the “last ray”
is in the cluster. To determine when a render is com-
plete, the workers report statistics about their activi-
ties to the renderer at regular intervals (in our current
implementation, 10 times per second). We found the
following four statistics to be useful for determining
render completion:
Primary Ray Casting Progress. The amount of the
worker’s primary rays that have been cast into the
scene.
Rays Produced. The number of rays created at the
worker during this measurement interval. This in-
cludes new intersection rays cast from the camera
or a shader, illumination ray messages created by
terminating intersection rays, or light rays created
by processing illumination ray messages.
Rays Killed. The number of rays finalized at the
worker during this measurement interval. This in-
cludes intersection rays that terminated or did not
hit anything, illumination ray messages that were
destroyed after spawning light rays, or light rays
who hit occluders or computed a shading value.
Rays Queued. The number of rays currently in this
worker’s ray queue.
If any worker has not finished casting its primary
rays, we know for certain the render is not com-
plete. Secondly, if no rays are produced, killed, or
queued at any workers for some number of consecu-
tive measurement intervals, it is reasonable to assume
that the render has concluded. Our current imple-
mentation (reporting at 10 Hz) waits for 10 consec-
utive intervals of “uninteresting” activity on all work-
ers before declaring the render complete. In practice,
this achieves a reasonable balance between ending the
render as quickly as possible and risking concluding
it before all rays have been processed.
FlexRender:ADistributedRenderingArchitectureforRayTracingHugeScenesonCommodityHardware
159

4.5.1 Image Synthesis
Once the render has been deemed “complete”, the
renderer requests the image buffers from each worker.
Because all rendering was computed by respecting
linearity, computing a pixel in the final output image
simply requires summing corresponding pixels in the
worker buffers.
This process can yield some interesting intermedi-
ate images, as seen in Figure 4. Each worker’s buffer
represents the light in the final image that interacts in
some way with geometry present on that worker. For
direct light, this shows up as shaded samples where
geometry was present and dark areas where it was not.
For other effects such as reflections and global illumi-
nation, we see the reflected light that interacted with
the geometry present on the worker.
Figure 4: The bottom images show the geometry split be-
tween two workers. The composite image is on top. Note
how the Buddha reflects the left side geometry in the left
image and the right side geometry in the right image. The
actual Buddha mesh data was distributed to the worker on
the left.
5 RESULTS
For testing, we used 2-16 Dell T3500 workstations
with dual-core Intel Xeon W3503 CPUs clocked at
2.4 GHz. Each workstation had 4 GB of system
RAM, a 4 GB swap partition, and was running Cen-
tOS 6. FlexRender consists of around 14,000 lines
of code, mostly C++. We leveraged several popular
open source libraries, including LuaJIT, libuv, Msg-
Pack, GLM, and OpenEXR. We used pfstools for tone
mapping our output images and pdiff for computing
perceptual diffs.
5.1 Test Scene
Our test scene, “Toy Store”, has a geometric complex-
ity of nearly 42 million triangles. The room geometry
is relatively simple, but the toys on the shelves are
unique (non-instanced) copies of the Stanford bunny,
Buddha, and dragon meshes that have been remeshed
from their highest quality reconstructions down to
14,249 faces, 49,968 faces, and 34,972 faces respec-
tively. There are 30 toys per shelf and 42 shelves in
the scene for a total of nearly 1,300 meshes. Approx-
imately one quarter of the meshes are rendered using
a mirrored shader, while the others used a standard
Phong shader. The mirrored shader is what causes
some black pixels in the image due to the scene not
being completely enclosed. The scene consists of
1.09 GB of mesh data and 5 GB of BVH data once
the acceleration structures are built.
We rendered a test image at a resolution of
1024x768 with no subpixel antialiasing, 10 Monte
Carlo samples per light (32 lights in the scene), and
a recursion depth limit of 3 bounces. For discussing
speedups initially, we will focus on the 8-worker case
(8 workers in the image plane decomposition configu-
ration vs. 8 workers in the FlexRender configuration),
but we will discuss varying cluster sizes in Section
5.6.
5.2 Image Plane Decomposition vs.
FlexRender
In the image plane decomposition case, we consider
8 workers by chopping up the image into several ver-
tical slices, with a different machine responsible for
each slice (see Figure 5). The slices are then reassem-
bled to form the final output image.
We report the time for each machine to complete
each phase of rendering (loading the scene, building
the BVH, and rendering its slice of the image) in Ta-
ble 1. The total duration of the render would take
10,061 seconds (the slowest time), because the last
slice is needed before the final image can be assem-
bled. We report average times for the image plane
decomposition workers compared to FlexRender for
each of the 3 rendering phases in Table 2 and show
FlexRender’s speedup over the average case of 6.57
times faster. We also report the total render time
(all three phases combined), using the slowest image
plane decomposition worker (time to final image).
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
160
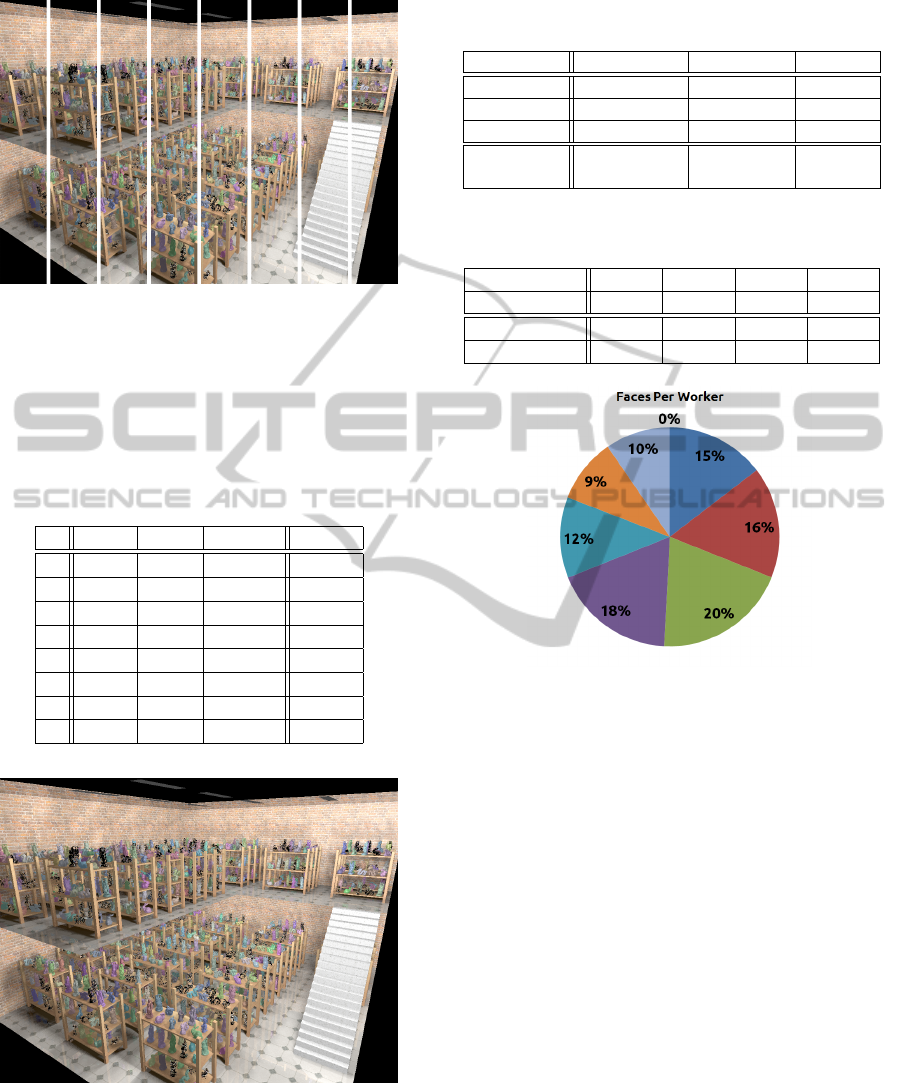
Figure 5: Slices of the Toy Store scene rendered with 8 ma-
chines using image plane decomposition (composite result
image shown in Figure 6).
Table 1: Time for each phase of the IPD algorithm, for each
of the 8 workers, in seconds. These include loading the
scene, building the BVH, rendering the slice, and the total
time of all three phases. Worker 4 was hit particularly hard
with divergent secondary rays, and spent a large amount of
time in I/O wait.
Load BVH Render Total
1 288 169 533 990
2 290 172 1119 1581
3 290 167 1491 1948
4 289 261 9511 10061
5 295 174 1792 2261
6 290 192 677 1159
7 287 167 1109 1561
8 294 171 303 768
Figure 6: Toy Store scene that is comprised of nearly 1,300
meshes and 42 million triangles.
5.3 Geometry Distribution
To ensure the entire scene stays in-core, FlexRen-
der must distribute the geometry across the available
Table 2: Time (in seconds) for each phase of rendering with
FlexRender versus the IPD configuration.
IPD FlexRender Speedup
Loading 290.4 (avg) 326 0.89x
Build BVH 183.6 (avg) 20 9.18x
Rendering 2066.9 (avg) 1186 1.74x
Total 10061 1532 6.57x
(slowest)
Table 3: Percentage of rays that were processed by the given
number of workers.
# of Workers 1 2 3 4
% of Rays 15.8% 25.6% 21.8% 18.8%
# of Workers 5 6 7 8+
% of Rays 8.9% 7.4% 1.5% 0.2%
Figure 7: Percentage of total geometry that was distributed
to each worker. Other than the worker with little geometry
(top corner with only a fill light), the size of geometry per
worker varied from 9% (106 MB of geometry and 488 MB
of BVH data) to 20% (221 MB of geometry 1007 MB of
BVH data) of the entire scene.
RAM in the cluster effectively. With the exception
of one worker, the Morton coding and Z-order curve
did a decent job of partitioning the scene data evenly.
Figure 7 shows a breakdown of the geometry distri-
bution. The one worker which did not contain very
much geometry was in the top corner of the Toy Store
closest to the camera. This octant of the scene only
contained a fill light facing the rest of the geometry.
5.4 Network Hops
The intent of the top-level BVH is to reduce network
cost by only sending rays across the network when
they venture into that worker’s region of space. Since
a BVH exhibits O(log n) traversal, we expect that
with 8 workers rays would be processed by 3 work-
ers in the average case.
Table 3 shows that 63.2% of rays are handled by
3 workers or less, and nearly 16% never even re-
FlexRender:ADistributedRenderingArchitectureforRayTracingHugeScenesonCommodityHardware
161
quire the network. (They are generated on, intersect
with, and are shaded on a single worker.) In addi-
tion, 36.8% of rays must touch more than the expected
3 workers. However, including hops for the corner
cases mentioned in Section 4.4.4, 82% of rays are at
or below O((log n) + 1) and 90.9% of rays are at or
below O((log n) + 2).
5.5 Ray Queue Sizes
Keeping the ray queue size small is critical to the long
term health of the render. If rays begin queuing up
faster than the cluster can process them, eventually
the cluster will begin swapping when accessing rays,
which violates our fundamental performance goal of
staying in-core.
Because of this, we logged ray queue sizes on each
worker over time while rendering Toy Store on a clus-
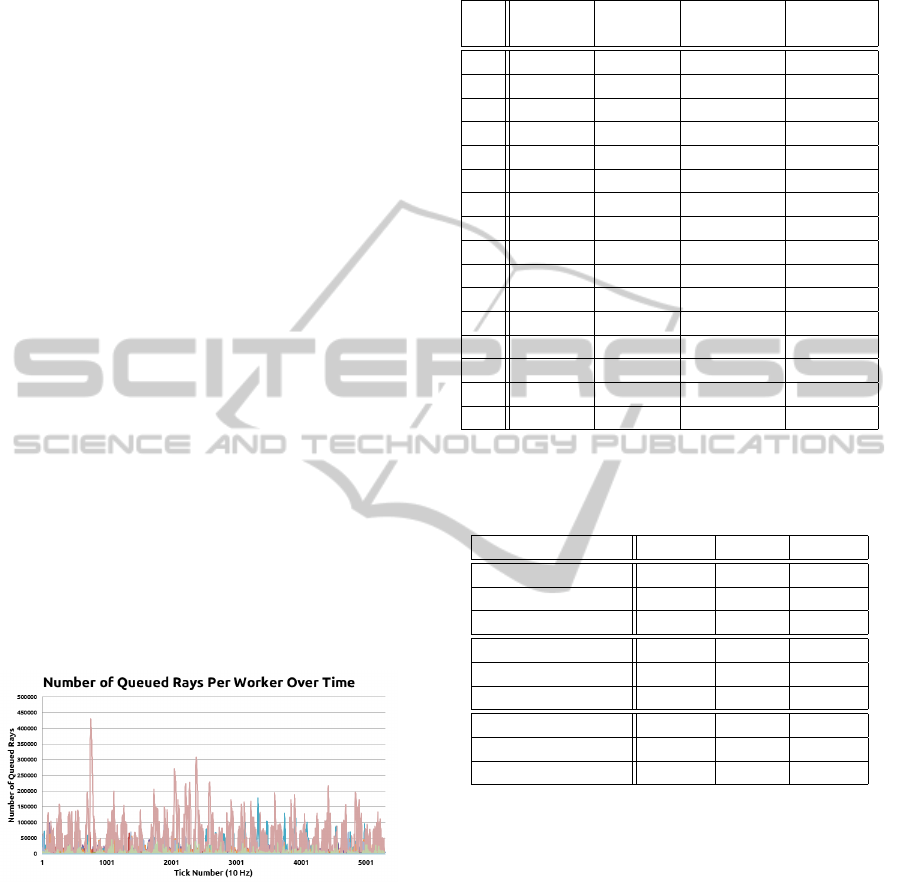
ter of 16 workers. Figure 8 shows the queue sizes over
time with workers represented as different colors. Ta-
ble 4 breaks down the average queue size, as well as
the maximum size over the course of the entire render
and the storage demands of the maximum size, both
in terms of raw storage space and a fraction of the
system RAM.
Most workers sit comfortably below 1% of their
RAM being used for queued rays, while the busiest
worker used just over 1%. This demonstrates that our
work throttling mechanisms, while simple, are keep-
ing the cluster from generating more work than it can
handle.
Figure 8: Number of rays queued on each worker over time.
Different colors correspond to different workers.
5.6 Cluster Size
To evaluate the scalability of the FlexRender architec-
ture, we ran Toy Store renders with cluster sizes of 4
workers, 8 workers, and 16 workers. For comparison,
we ran the same renders in the image plane decompo-
sition configuration also of 4, 8, and 16 workers.
Table 5 shows a continual and impressive im-
provement in the BVH construction time as the num-
ber of workers increases. This is thanks to the huge
Table 4: Size of ray queues when rendering Toy Store with
a 16-worker FlexRender cluster.
Avg Max Max Memory
Queued Queued Storage Use
1 107 12221 1.49 MB 0.04%
2 506 29796 3.64 MB 0.09%
3 969 34970 4.27 MB 0.10%
4 3116 57597 7.03 MB 0.17%
5 1687 36981 4.51 MB 0.11%
6 1430 44053 5.38 MB 0.13%
7 4070 80899 9.88 MB 0.24%
8 2000 16861 2.06 MB 0.05%
9 3767 97429 11.89 MB 0.29%
10 7921 178191 21.75 MB 0.53%
11 4477 69702 8.51 MB 0.21%
12 4943 92043 11.24 MB 0.27%
13 51164 430736 52.58 MB 1.28%
14 2193 45428 5.55 MB 0.14%
15 0 0 0 MB 0.00%
16 18 1374 0.17 MB 0.01%
Table 5: Comparison of cluster sizes with both image
plane decomposition (IPD) and the FlexRender configura-
tion (Flex). Times are in seconds.
# of Workers 4 8 16
IPD BVH Build 203 184 171
Flex. BVH Build 39 20 10
Speedup 5.21x 9.20x 17.1x
IPD Render 14833 10061 7702
Flex. Render 1742 1532 970
Speedup 8.51x 6.57x 7.94x
IPD Total 14536 9800 7413
Flex. Total 1405 1206 540
Speedup 10.35x 8.13x 13.73x
parallelization speedup from partitioning the scene
geometry with Morton coding and building each sub-
tree in parallel.
We also see render time improvements of roughly
an order of magnitude, depending on how FlexRen-
der chooses to distribute the geometry based on the
number of workers available. It is likely that this per-
formance advantage will slowly erode at much larger
cluster sizes (due to increasing network communica-
tion costs), but for small to medium cluster sizes we
see approximately linear growth.
5.7 Example Renders
Figure 6 shows the final Toy Store scene render, with
nearly 42 million triangles and 1,300 meshes.
Figure 1 shows a scene with even higher resolu-
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
162

tion meshes, bringing the geometric complexity up to
87 million triangles, rendered on a cluster of 4 ma-
chines.
Figure 9 shows a monochromatic Cornell Box ren-
dered by two workers. The final composite is on the
left, while the individual image buffers are stacked on
the right. With only direct lighting and no reflections,
this clearly shows which geometry was assigned to
each worker.
Figure 9: A monochromatic Cornell Box, showing the dis-
tribution of geometry between two workers.
Figure 10 demonstrates FlexRender’s Lua-based
shader system. The bunny mesh is toon shaded, while
the Buddha mesh has a perfect mirror finish. Reflec-
tion rays for the mirrored Buddha and floor are cast
directly from the shaders.
Figure 10: A Cornell Box with a toon shaded bunny and
mirrored Buddha.
5.8 Summary
With these results, we have demonstrated that
FlexRender meets our claimed contributions in the
following ways.
• Rays carry enough state to never require replies
thanks to the feed-forward messaging design.
• This design allows the implementation of a shader
system that requires no suspension of shader exe-
cution state as rays are moved between workers.
• FlexRender can correctly and efficiently traverse
the scene when workers only contain spatially lo-
cal BVHs, linked by a top-level BVH.
• The system keeps itself regulated and reduces
memory usage by throttling new work generation
and processing rays in an intelligent order.
• FlexRender shows consistent speedups over im-
age plane decomposition, which suffers greatly
from swapping to disk frequently during the ren-
dering process.
5.9 Future Work
FlexRender could benefit from specialized tuning
to scheduling and spatial distribution. Specifically,
adding dynamic task scheduling as described in
(Navr
´
atil et al., 2012) could dramatically improve per-
formance, and adopting a more sophisticated spatial
distribution method as described in (Badouel et al.,
1994) could also help with workload distribution.
The cache-oblivious ray reordering technique pre-
sented in (Moon et al., 2010) would complement
our work quite nicely, and could offer another or-
der of magnitude improvement in performance. Ex-
plorations with multiresolution geometry or coupling
FlexRender with existing out-of-core methods would
also dramatically increase the complexity of scenes
FlexRender can handle efficiently.
With respect to our existing implementation, some
network hops could be avoided when the ray fin-
ishes traversing the top-level BVH but ends up on a
worker that is not the point of intersection. Because
the worker has no shading assets for the terminating
geometry, it must pass the ray back to the “winning”
worker for shading. By distributing all of the shading
assets (shaders, textures, and materials) to all work-
ers, any worker would be capable of computing shad-
ing regardless of whether it was responsible for the
terminating geometry.
Memory optimizations, such as object pooling,
could exploit the transient nature of many fixed-size
fat rays to reduce allocation overhead and heap frag-
mentation. In addition, the linear BVH node struc-
tures were intentionally padded to 64-bytes to match
the cache line size on current CPUs. However with-
out an aligned STL allocator for the vector that stores
this array of nodes, cache alignment is not guaranteed.
FlexRender:ADistributedRenderingArchitectureforRayTracingHugeScenesonCommodityHardware
163

Additionally, greater code optimization (e.g. use of
SIMD instructions) could also improve performance.
Finally, one of FlexRender’s strengths is that it
decouples the ray tracing computations from shading
with a feed-forward design that requires no replies.
Because messages are both asynchronous and never
return, this opens up the possibility for batching com-
putation to specialized hardware coprocessors, such
as GPUs or the upcoming Intel MIC cards.
REFERENCES
´
Afra, A. (2012). Interactive ray tracing of large models
using voxel hierarchies. Computer Graphics Forum,
31(1):75–88.
Badouel, D., Bouatouch, K., and Priol, T. (1994). Distribut-
ing data and control for ray tracing in parallel. Com-
puter Graphics and Applications, IEEE, 14(4):69 –77.
Cignoni, P., Montani, C., Scopigno, R., and Rocchini, C.
(1998). A general method for preserving attribute
values on simplified meshes. In Proceedings of the
conference on Visualization ’98, VIS ’98, pages 59–
66, Los Alamitos, CA, USA. IEEE Computer Society
Press.
Clark, J. H. (1976). Hierarchical geometric models for
visible-surface algorithms. In Proceedings of the 3rd
annual conference on Computer graphics and inter-
active techniques, SIGGRAPH ’76, pages 267–267,
New York, NY, USA. ACM.
Cohen, J., Olano, M., and Manocha, D. (1998).
Appearance-preserving simplification. In Proceedings
of the 25th annual conference on Computer graph-
ics and interactive techniques, SIGGRAPH ’98, pages
115–122, New York, NY, USA. ACM.
Dean, J. and Ghemawat, S. (2004). Mapreduce: simplified
data processing on large clusters. In Proceedings of
the 6th conference on Symposium on Opearting Sys-
tems Design & Implementation - Volume 6, OSDI’04,
pages 10–10, Berkeley, CA, USA. USENIX Associa-
tion.
DeMarle, D. E., Gribble, C. P., and Parker, S. G. (2004).
Memory-savvy distributed interactive ray tracing. In
Proceedings of the 5th Eurographics conference on
Parallel Graphics and Visualization, EG PGV’04,
pages 93–100, Aire-la-Ville, Switzerland, Switzer-
land. Eurographics Association.
Djeu, P., Hunt, W., Wang, R., Elhassan, I., Stoll, G., and
Mark, W. R. (2011). Razor: An architecture for
dynamic multiresolution ray tracing. ACM Trans.
Graph., 30(5):115:1–115:26.
Garanzha, K., Bely, A., Premoze, S., and Galaktionov,
V. (2011). Out-of-core gpu ray tracing of complex
scenes. In ACM SIGGRAPH 2011 Talks, SIGGRAPH
’11, pages 21:1–21:1, New York, NY, USA. ACM.
Hapala, M., Davidovic, T., Wald, I., Havran, V., and
Slusallek, P. (2011). Efficient stack-less bvh traversal
for ray tracing. In 27th Spring Conference on Com-
puter Graphics, SCCG ’11.
Kato, T. and Saito, J. (2002). ”kilauea”: parallel global
illumination renderer. In Proceedings of the Fourth
Eurographics Workshop on Parallel Graphics and Vi-
sualization, EGPGV ’02, pages 7–16, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Kontkanen, J., Tabellion, E., and Overbeck, R. S. (2011).
Coherent out-of-core point-based global illumination.
In Eurographics Symposium on Rendering.
Krishnamurthy, V. and Levoy, M. (1996). Fitting smooth
surfaces to dense polygon meshes. In Proceedings
of the 23rd annual conference on Computer graph-
ics and interactive techniques, SIGGRAPH ’96, pages
313–324, New York, NY, USA. ACM.
Moon, B., Byun, Y., Kim, T.-J., Claudio, P., Kim, H.-
S., Ban, Y.-J., Nam, S. W., and Yoon, S.-E. (2010).
Cache-oblivious ray reordering. ACM Trans. Graph.,
29(3):28:1–28:10.
Navr
´
atil, P. A., Fussell, D. S., Lin, C., and Childs,
H. (2012). Dynamic scheduling for large-scale
distributed-memory ray tracing. In Proceedings of Eu-
rographics Symposium on Parallel Graphics and Visu-
alization, pages 61–70.
Northam, L. and Smits, R. (2011). Hort: Hadoop online
ray tracing with mapreduce. In ACM SIGGRAPH
2011 Posters, SIGGRAPH ’11, pages 22:1–22:1, New
York, NY, USA. ACM.
Pantaleoni, J., Fascione, L., Hill, M., and Aila, T. (2010).
Pantaray: fast ray-traced occlusion caching of mas-
sive scenes. In ACM SIGGRAPH 2010 papers, SIG-
GRAPH ’10, pages 37:1–37:10, New York, NY, USA.
ACM.
Reinhard, E., Chalmers, A., and Jansen, F. W. (1999). Hy-
brid scheduling for parallel rendering using coherent
ray tasks. In Proceedings Parallel Visualization and
Graphics Symposium, pages 21–28.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
164
