
Adaptively Simulating Inhomogeneous Elastic Deformation
Sei Imai
1
, Yonghao Yue
1
, Bing-Yu Chen
1,2
and Tomoyuki Nishita
1
1
The University of Tokyo, Tokyo, Japan
2
National Taiwan University, Taipei, Taiwan
Keywords:
Deformation, Simulation, Elastic Object, Elasticity Matrix, Inhomogeneous, Adaptive Simulation.
Abstract:
In this paper, we present an adaptive approach for simulating elastic deformation of homogeneous and inho-
mogeneous objects based on continuum mechanics. In typical adaptive simulation approaches, the deforming
elastic object is usually subdivided to form a tree structure on the fly. However, they are not directly applicable
for inhomogeneous elastic deformation, since the elasticity matrix, which describes the stiffness, of each ele-
ment in each resolution is difficult to estimate at runtime. Furthermore, as most multi-resolution approaches,
it is usually required that the stiffness of the object should either be uniform all throughout its body or con-
sist of a collection of uniform parts, otherwise the elasticity matrices for the elements in coarse levels cannot
be determined. Hence, we propose a bottom-up sampling approach to estimate the elasticity matrices for all
elements in all levels based on a given stiffness function. Moreover, the subdivision process is also moved to
the off-line preprocessing stage with the elasticity matrix estimation to reduce the runtime computational cost
while achieving the adaptive simulation by adaptively selecting the simulation level on the fly. Therefore, we
can efficiently simulate the deformation of an elastic object even with spatially varying stiffness.
1 INTRODUCTION
Physically-based simulation of soft bodies (or elas-
tic objects), e.g., jelly, is important for movies and
video games. Currently a lot of techniques are car-
ried out in soft body dynamics in computer graph-
ics. Mass-spring- and particle-based models (e.g.,
(Tu and Terzopoulos, 1994; Lee et al., 1995; Baraff
and Witkin, 1998)) are usually used for interactive
applications (e.g., video games), and more accurate
simulation methods based on continuum mechanics
(e.g., by using FEM, or finite element method) are
mainly used for filming because they can usually pro-
vide higher accuracy results. Since FEM-based mod-
els require heavy calculation, several multi-resolution
approaches like adaptive subdivision techniques (e.g.,
(Debunne et al., 2001; Grinspun et al., 2002)) are pro-
posed.
In general multi-resolution approaches, the input
elastic object is divided into several elements (in our
case, tetrahedra) which form a hierarchical structure.
That is, several sets of elements representing the ob-
ject are constructed for various resolutions (or levels),
and a tree-like(i.e., parent-children)relationship is es-
tablished between the elements in different levels. A
difficulty in using such approaches for simulating in-
homogeneous elastic deformation is that the elasticity
matrices, which describe the stiffness, of the elements
in different levels may have different values, because
a parent element may contain the children elements
with different stiffness. In typical multi-resolution
methods, a parent element shares the elasticity matri-
ces with its children elements, making that the object
needs to either be uniform or consist of a collection
of uniform parts. Moreover, to achieve the adaptive
simulation in the typical methods, the discretization
(i.e., tetrahedron subdivision) is usually performed on
the fly. However, since the elasticity matrix of each
element in each resolution is difficult to estimate at
runtime, it is hard to directly apply such approaches
for inhomogeneous elastic deformation.
In this paper, we present a bottom-up sampling ap-
proach to estimate the elasticity matrices for all el-
ements in all levels based on a given stiffness func-
tion before performing the simulation. Using the pre-
sented approach, a parent element can consist of the
children elements with different or even continuously
varying stiffness. Moreover, the tetrahedron subdivi-
sion is also moved to the off-line preprocessing stage
with the elasticity matrix estimation to ease the run-
time processes while achieving the adaptive simula-
tion by adaptively selecting the simulation level on
the fly.
Our approach is composed from the off-line pre-
237
Imai S., Yue Y., Chen B. and Nishita T..
Adaptively Simulating Inhomogeneous Elastic Deformation.
DOI: 10.5220/0004290302370244
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 237-244
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

soft
hard
stiffness functionbase tetrahedra model
Input
level 0 model level 1 model
Tree Structure Construction
level 0 model level 1 model
Elasticity Matrix Estimation
Preprocessing
adaptive level selection
Simulation
Run-time
force computation model updating
Figure 1: The overview of our adaptive simulation scheme. The illustration is drawn in 2D for simplicity.
processing and runtime stages. During the prepro-
cessing, the input elastic object is first recursively
subdivided into several tetrahedra to construct the
multi-resolution tree structure while keeping the qual-
ity of the subdividedtetrahedra as good as possible for
stable simulation. Next, based on the given stiffness
function, the elasticity matrices of all elements (i.e.,
tetrahedra) are estimated from fine levels to coarse
levels through a sampling approach. According to
the bottom-up operation, we can acquire the elasticity
matrices of all elements in all levels. At runtime, the
simulating elements are selected adaptively according
to a user-given error-threshold and the strain posed on
the elements with spatially varying stiffness. By using
our approach, we can simulate the deformation of in-
homogeneous as well as homogeneous elastic objects
adaptively.
2 RELATED WORK
There is a considerable amount of research on elastic
deformation simulation in computer graphics (Gib-
son and Mirtich, 1997; Nealen et al., 2006). Meth-
ods using mass-spring- or particle-based models (Tu
and Terzopoulos, 1994; Lee et al., 1995; Baraff and
Witkin, 1998) are usually used for interactive appli-
cations, such as video games. To obtain more accu-
rate results, one can use the methods that compute the
continuum mechanics. Such methods can be typically
classified to meshless ones (e.g., (Faure et al., 2011))
and finite element methods (FEM). In this paper, we
focus on FEM.
FEM divides the space into small regions utilizing
finite elements like tetrahedra (O’Brien and Hodgins,
1999; M¨uller et al., 2001) or hexahedra (Capell et al.,
2002). To improve FEM, a large amount of research
has been conducted for the discretization of the in-
put object (e.g., (Shewchuk, 1998) or (Schaefer et al.,
2004)), and for accelerating the computation. To re-
duce the heavy computation cost of FEM, adaptive
subdivision approaches (e.g., (Debunne et al., 2001;
Grinspun et al., 2002; Dequidt et al., 2005)) are usu-
ally used. These approaches subdivide the input ob-
ject according to its strain at runtime. A major prob-
lem of such methods is that they can only be applied
to homogeneous objects.
There are also some methods that can simulate in-
homogeneous elastic objects, e.g., (Chentanez et al.,
2009), but are also time-consuming. One of the
speed-up approaches is numerically coarsening the
linear elastic object (Kharevych et al., 2009). In
this method, the inhomogeneousobjects are deformed
with coarsened tetrahedra, and the fine structures are
mapped into the interpolated position. In (Nesme
et al., 2009), the inhomogeneous elastic object is em-
bedded into grids and the grids’ elasticities are com-
puted to achieve inhomogeneous deformation. How-
ever, to the best of our knowledge, there is no adap-
tive approach for simulating inhomogeneous elastic
objects.
3 ADAPTIVE SIMULATION
SCHEME
Our method is an adaptive approach and based on
FEM (O’Brien and Hodgins, 1999). In typical adap-
tive simulation methods, the deforming elastic object
is subdivided adaptively on the fly, which usually re-
quires the material of the object to be as uniform as
possible. Unlike such methods, our adaptive simula-
tion scheme moves the subdivision process to an off-
line preprocessing stage (Sec. 3.1) with the elasticity
matrix estimation (Sec. 4) to reduce the runtime sim-
ulation cost (Sec. 3.2 and Sec. 5) as shown in Fig. 1.
Therefore, our approach is constructed from the off-
line preprocessing stage and the runtime simulation
stage.
3.1 Tree Structure Construction
In our off-line preprocessing stage, we first con-
struct the tree structure for the adaptive simulation
scheme while assuming that the input object is al-
ready roughly tetrahedralized
1
. Based on this input
tetrahedra set, we further recursively subdivide it to
form a tree structure, while keeping the shapes of the
subdivided tetrahedra as “high quality” as possible,
1
We believe that this assumption could be improved in
the future.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
238

Tet
1
Tet
2
Tet
3
Tet
11
Tet
111
Tet
112
Tet
12
Tet
121
Tet
122
Tet
21
Tet
211
Tet
212
Tet
221
Tet
222
Tet
311
Tet
312
Tet
321
Tet
322
Tet
22
Tet
31
Tet
32
Tetrahedra front
Base tetrahedra set
Figure 2: Illustration of the tetrahedra tree. The base tetra-
hedra set as the roots is the input tetrahedra set which is also
the coarsest simulation level. Any cut through the interme-
diate tetrahedra forms a specific simulation resolution.
otherwise the simulation will easily diverge at run-
time. Although there are several tetrahedron subdivi-
sion approaches applicable to this tree structure con-
struction, to guarantee the subdivided elements only
consist of tetrahedra, we used a tetrahedron subdivi-
sion approach like (Liu and Joe, 1995).
3.2 Simulation with Tetrahedra Front
For a given tetrahedra tree, we first define a “tetrahe-
dra front” as shown in Fig. 2, which is a cut through
the intermediate tetrahedra to form a specific resolu-
tion for simulation and usually used in mesh simpli-
fication papers (e.g., (Hoppe, 1996)). If the “tetra-
hedra front” contains all leaf tetrahedra, the simu-
lation will be performed in the finest resolution to
achieve the most accurate simulation result. On the
other hand, once the “tetrahedra front” only contains
the “base tetrahedra set”, the simulation will be per-
formed with only the input tetrahedra set (i.e., in the
coarsest level) to achieve the best simulation perfor-
mance. Hence, before performing the deformation
simulation, we have to first decide the “tetrahedra
front” in the tetrahedra tree, in order to maximize the
simulation performance while keeping the simulation
accuracy to achieve the adaptive simulation (detailed
in Sec. 5.2 and Sec. 5.1).
After deciding the tetrahedra front, the object can
be deformed in accordance with the following equa-
tion:
σ = Cε, (1)
which is the Hooke’s law generalized to three-
dimensional case, where σ,ε ∈ R
6
is the strain and
stress vectors, respectively, and C ∈ R
6×6
is an elas-
ticity matrix which defines the material (i.e., stiffness)
of the deforming elastic object
2
.
2
In some literature, the strain, stress and elasticity are
described as tensors, which are equivalent to the formu-
lation used in this paper. We used the matrix-vector
form (Zienkiewicz et al., 2005) for simplicity.
In the deformation simulation, we repeat the fol-
lowing process in each time-step. First, we calcu-
late the strain vector ε of each element (tetrahedron).
Next, we calculate the stress vector σ with the elastic-
ity matrix C in accordance with Eq.(1). Then, we cal-
culate the acceleration, velocity and position of each
vertex at that time-step. Finally, we perform a proce-
dure described in Sec. 5.3 to handle T-junctions.
4 ELASTICITY MATRIX
ESTIMATION AND VALID
RANGE
After the tetrahedron subdivision, our tree structure
contains only tetrahedra. If we finely subdivide the
input elastic object, we can assume that all the tetra-
hedra in the finest level n (i.e., the leaf tetrahedra)
are nearly uniform, and their elasticity matrices C can
be easily obtained from the given stiffness function
3
.
Hence, we then need to estimate the elasticity matri-
ces C of the elements (i.e., tetrahedra) in coarse levels
(i.e., level 0 to n − 1) through a bottom-up sampling
approach.
Remember that an elasticity matrix C describes
the linear relationship between a stress vector σ and a
strain vector ε as shown in Eq.(1). This means that if
we know the stress vector σ given the strain vector ε,
we can compute the elasticity matrix C by solving a
linear equation. Thus, the basic idea of our bottom-up
approach is to first move the tetrahedra in the coarse
level according to ε, simulate the deformation in the
fine level, then obtain σ in the fine level and reinter-
pret this σ as the one in the coarse level. Finally, we
can obtain C from the linear relationship between σ
and ε in the coarse level. We describe the details be-
low.
4.1 Strain Vector Decomposition
To make the calculation for solving the linear equa-
tion simple, we first decompose the strain vector ε into
six bases as the linear combination form as:
ε =
6
∑
m=1
α
(m)
ε
(m)
, (2)
where m = 1,...,6 is the index of each base, α
(m)
∈ R
is a scalar ranged in −1 < α
(m)
< 1, and ε
(m)
is one
of the linear isolated strain vector bases, in which the
m-th element is 1 and others are 0.
3
If this assumption is not valid, we could apply numeri-
cal coarsening to compute the elasticity matrices
AdaptivelySimulatingInhomogeneousElasticDeformation
239

Next, since the Hooke’s law is linear, we can
further decompose Eq.(1) into σ =
∑
6
m=1
α
(m)
Cε
(m)
,
and the j-th element σ
j
of the vector σ can
be represented as σ
j
=
∑
6
m=1
α
(m)
∑
6
k=1
C
jk
ε
(m)
k
=
∑
6
m=1
α
(m)
C
jm
, where C
jk
is one of the elements of
C in the j-th column and k-th row, and ε
(m)
k
is the k-th
element of ε
(m)
. Alternatively, we have
σ =
6
∑
m=1
α
(m)
C
m
, (3)
where C
m
is the m-th row of C.
4.2 Elasticity Matrix Estimation
Based on Eq.(3), to determine the elements of C, for
each row m, we let α
(m)
be nonzero and α
(m
′
)
(m
′
6= m)
be zero, and compute C
m
as C
m
= σ/α
(m)
. However,
for accurately computing C
m
, it is not sufficient to use
only a single value of α
(m)
for the following two rea-
sons. First, σ obtained from the simulation may con-
tain numerical errors. Second, the linear relationship
C
m
= σ/α
(m)
is only valid for small deformations,
i.e., when |α
(m)
| is small. Hence, we sample multi-
ple couples of the scalar α
(m)
for each ε
(m)
to esti-
mate C
m
as shown in Fig. 3. From the estimation, we
also obtain a valid range for α
(m)
such that the linear
relationship is valid (detailed in Sec. 4.3).
To estimate the unknown elasticity matrix of a
tetrahedron in level n − 1 from the known elasticity
matrices of tetrahedra in level n, we first, for a base
m, determine a value of α
(m)
and let the strain vector
ε = α
(m)
ε
(m)
(i.e., for other bases m
′
6= m, α
(m
′
)
= 0).
Then, the vertices in level n − 1 are moved so that
the strain vector of the parent tetrahedron equals to
the determined strain vector ε. From these vertices,
we initialize the positions of the vertices in level n as
follows. The vertices in level n can be grouped into
1) the vertices which have corresponding vertices in
level n − 1, and 2) the other vertices which do not
have. For the former vertices, we fix their positions to
the locations of their corresponding vertices in level
n− 1. For the latter ones, their positions are allowed
to moveduring the process described later and are ini-
tialized using linear interpolation from the vertices in
level n− 1.
After initializing the positions of the vertices in
level n, we simulate the elastic deformation of the
tetrahedra in level n based on Eq.(1) using the known
elasticity matrices in level n. In this simulation, only
the positions of the vertices that are allowed to move
are updated. After the stresses are balanced, we then
calculate the stress vector σ in level n − 1 from the
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-1.5 -1 -0.5 0 0.5 1 1.5
fi!ed line
sampling data
Figure 3: The relationship between α
(m)
(the x-axis) and a
vector component of σ (the y-axis).
stress vectors in level n to obtain one sample of the re-
lationship between a stress vector and a strain vector
as one of the blue dots shown in Fig. 3. By changing
the magnitude of the scalar α
(m)
arbitrarily, we can
obtain multiple samples.
Finally, we can use a straight line to fit the mul-
tiple samples while ignoring some outliers as the red
line shown in Fig. 3, and the slope of the fitted line is
the element of the elasticity matrix of level n− 1.
4.3 Valid Range for Strain Vectors
As described in the previous section, the linear rela-
tionship used for estimating the elasticity matrix is
only valid for small deformations. Hence, the value
of the element C
jm
of the elasticity matrix is valid if
the following condition for α
(m)
is satisfied.
|α
(m)
C
jm
− σ
j
(α
(m)
)|
|α
(m)
C
jm
|
< T
1
, (4)
where T
1
is a user-specified threshold,C
jm
is the slope
of the fitted line as shown in Fig. 3, and σ
j
(α
(m)
) is
the value obtained from the simulation (i.e., one of the
blue dots in Fig. 3). Using only the above condition,
however, results in erroneous conditioning when the
denominator is small. Thus, we also introduce the
following condition.
|α
(m)
C
jm
− σ
j
(α
(m)
)| < T
2
, (5)
where T
2
is another user-specified threshold. If either
of the two above conditions is satisfied, we can apply
linear fitting for that range. We denote the lower and
upper bounds of this valid range as α
(m)
min
and α
(m)
max
,
respectively, and set T
1
= 1.0× 10
−2
and T
2
= 1.0 ×
10
−4
in our experiment.
These two thresholds are the parameters to control
the error bound. If they are set smaller, the allowed
error becomes smaller (i.e., more accurate). Thus, the
valid range will be narrower and the simulation tends
to switch to finer levels more often.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
240
5 ADAPTIVE LEVEL SELECTION
Our runtime operation consists of three steps: 1) up-
dating the tetrahedron front; 2) calculating the inter-
nal force and updating the velocity and position of
each node; and 3) adjusting the vertices aligned at
the T-junctions. In step 1), the tetrahedron front is
updated by either replacing children tetrahedra with
their parent tetrahedron, or replacing a parent tetrahe-
dron with its children tetrahedra. We describe the con-
ditions for these replacements in Sec. 5.1 and Sec. 5.2.
For step 2), please refer to (O’Brien and Hodgins,
1999). Finally, the details of step 3) are described in
Sec. 5.3.
5.1 Coarse to Fine Switching
To decide the tetrahedron front for simulation, we first
check if we need to switch a tetrahedron in the tetrahe-
dron front to its children tetrahedra in one finer level
while taking into account the valid range of strain vec-
tor described in Sec. 4.3. For each tetrahedron, we
calculate the strain vector ε posed on the tetrahedron
and decompose it using ε
(m)
as Eq.(2). Then, if all
α
(m)
are in their valid ranges, i.e., for all m,
α
(m)
min
< α
(m)
< α
(m)
max
, (6)
we regard the selected level as proper. Otherwise, we
switch this tetrahedron to its children.
5.2 Fine to Coarse Switching
As using a parent (coarse) tetrahedron instead of its
children tetrahedra would introduce errors into the
simulation, switching from fine level to coarse level
needs to be taken carefully, and indeed it is more com-
plex. In our method, we switch to a parent tetrahedron
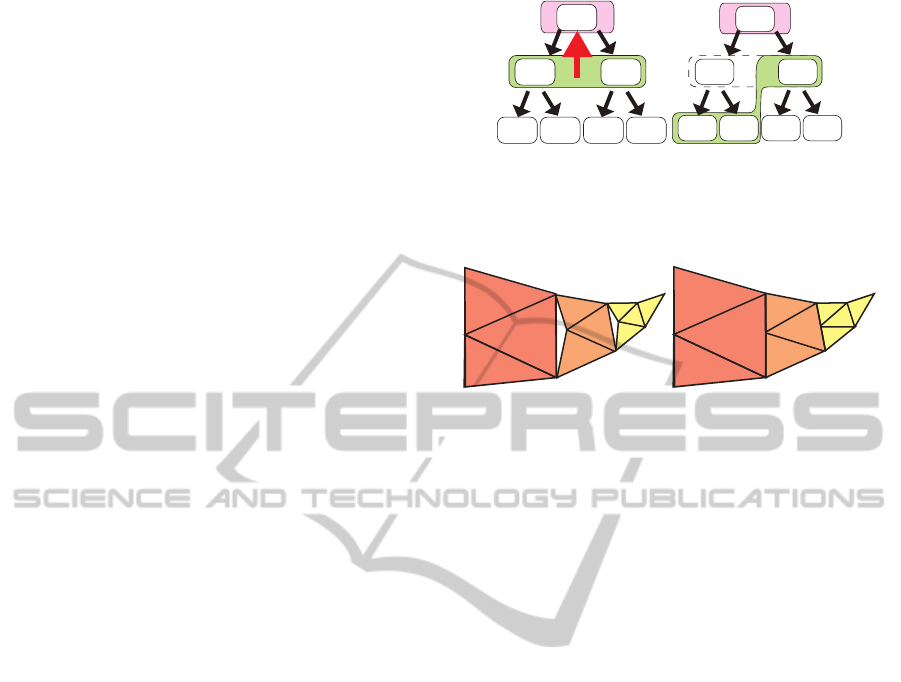
if the following three conditions are all satisfied.
1. The strain vector of the parent tetrahedron is
within the valid range as Eq.(6).
2. All of the children tetrahedra of the parent tetra-
hedron are contained in the tetrahedra front.
3. All strain vectors of the children tetrahedra are al-
most the same as that of their parent tetrahedron.
The first condition is needed to ensure that the re-
lationship between the strain and stress vectors can
be accurately handled even when we use the coarse
level. The second condition is needed to avoid the
case when finer levels are used to represent one or
more children tetrahedra of the parent tetrahedron, as
shown in Fig.4. In this case, switching to the par-
ent tetrahedron would discard the fine structure which
is needed for a sufficiently accurate calculation. The
Tet
1
Tet
11
Tet
111
Tet
112
Tet
12
Tet
121
Tet
122
(a)
Tet
1
Tet
11
Tet
111
Tet
112
Tet
12
Tet
121
Tet
122
(b)
Figure 4: (a) A coarse to fine switchable case and (b) an
unswitchable case. The green area is the tetrahedron front
and pink area is the candidate tetrahedron to switch.
(a) (b)
Figure 5: (a) A crack may appear due to the T-junction prob-
lem. (b) The T-junction vertex of the tetrahedra in the fine
level is fixed at the middle point of its corresponding edge of
the coarse tetrahedron to ensure the continuity of the object.
third condition is needed to take into account the ac-
tual forces posed on the children tetrahedra. If the
forces largely differ across the tetrahedra, then using
the parent tetrahedron would result in a crude approx-
imation of the forces.
5.3 Handling T-junctions
Tetrahedra in different levels may cause a T-junction
problem as shown in Fig. 5. At the T-junction, there
is a T-junction vertex belonging to the tetrahedra in
the fine level, but is not shared by their parent tetra-
hedron in the coarse level, a crack or overlap may
thus occur. To avoid this problem, we enforce the
T-junction vertex to be fixed at the middle point of
its corresponding edge of the coarse tetrahedron like
other adaptive modeling methods. The procedure of
this enforcement is performed from the coarsest level
toward the finest level.
6 RESULTS
The simulation has been performed on a PC with an
Intel Core X980 3.33 GHz CPU with 8 GB memory.
First, we show the comparison between our ap-
proach and the existing method (O’Brien and Hod-
gins, 1999), by simulating a deforming box, which
is fixed on a wall, according to the gravity force as
shown in Fig. 6. At the beginning of the simula-
tion, the box in our approach was mostly composed
AdaptivelySimulatingInhomogeneousElasticDeformation
241

Figure 6: A comparison of our method (left) and the exist-
ing method (right).
0
200
400
600
800
1000
1 301 601 901 1201
The number of
tetrahedra
Steps
Finest
Adaptive
(a)
0.0%
0.5%
1.0%
1.5%
2.0%
1 301 601 901 1201
Error
Steps
Average
Maximum
(b)
Figure 7: (a) The numbers of tetrahedra of our adaptive ap-
proach (solid line) and of the finest level (dashed line). (b)
Computation error of our method. Solid line: average error.
Dotted line: maximum error.
of coarse tetrahedra, since the magnitude of the defor-
mation is small for most parts (Fig. 7). A few seconds
later, some parts of the box that moved a lot switched
to a finer level, but the rest parts kept their original
level since the movement is not so large. When the
deformation reached the equilibrium, most parts were
smoothly deformed and the levels they belonged to
were almost the finest.
We also checked the processing time the defor-
mation requires on each update as shown in Fig. 8.
First, since most tetrahedra belonged to the coarsest
level in the beginning of the simulation, the process-
ing time of our method was an order of magnitude
faster than that of the existing method. As the simula-
tion progressed, the level switched to a finer level and
more processing time was required. When all parts
switched to the finest level due to the large deforma-
tion, the calculation time was still competitive to the
existing method.
0
0.5
1
1.5
2
2.5
1 301 601 901 1201
Computation time
per step [ms]
Simulation time [sec]
Finest
Adaptive
(a)
0
0.5
1
1.5
2
2.5
0 5 10
Computation time
per step [ms]
Simulation time [sec]
Finest
Adaptive
(b)
Figure 8: (a)A comparison of the calculation time between
using our adaptive approach (solid line) and the finest level
(dashed line). (b) A zoomed view of (a).
Figure 9: A smooth mesh is embedded in the tetrahedral
structure.
The computation error between using our adap-
tive approach and using the finest level is shown in
Fig. 7. The error is defined as the difference between
the locations of the vertices when using our adaptive
approach and the finest level. The error is normalized
by dividing the difference by the longest edge length
of the box. The average of the errors is under 0.5%
and the maximum value of the errors is under 1.7%.
For rendering, we want to acquire a smooth result
with the tetrahedral structure used for simulation as
shown in Fig. 9. During the initial step, for each ver-
tex of the embedded smooth mesh, we compute the
corresponding finest tetrahedron the vertex belongs
to, and compute the barycentric coordinates of the
vertex in the tetrahedron. During the rendering step,
the location of each vertex of the embedded smooth
mesh is computed from a liner interpolation using the
barycentric coordinates and the locations of the ver-
tices of the corresponding tetrahedron.
To show a more complicated result, we simulated
a bunny-shaped inhomogeneousjelly according to the
gravity force as shown in Fig. 10. The bunny has a
continuous stiffness distribution, so that the (red col-
ored) bottom part is stiff but the (yellow colored) top
part is soft. Because of the inhomogeneous stiffness,
the bunny can stand alone thanks to its stiff feet, while
its ears are hanging down from the head since they are
soft.
We also simulated an armadillo-shaped inhomo-
geneous jelly (Fig. 12). In this example, the gravity
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
242

Figure 10: The simulation of a inhomogeneous bunny-
shaped jelly. The stiffness of jelly is continuously different
from bottom to top. The part around its feet is stiff (red) and
the part around its ears is soft (yellow).
Figure 11: Left: the tetrahedra mesh of the coarsest level.
Right: the stiffness is continuously varying from left to
right.
force is not applied. The armadillo has a continuous
stiffness distribution from left to right (again, red and
yellow colors indicate more stiff and soft portions,
see Fig. 11). We applied external forces in the same
magnitude on its right and left hand. Since its right
hand is more soft, with the same magnitude of exter-
nal forces, it gets longer than the left hand.
To show a deformation of an object made of parts
with different stiffness, we simulated the deformation
of an inhomogeneous liver according to the gravity
force as shown in Fig. 13. The vessels are stiffer than
other tissues.
7 CONCLUSIONS AND FUTURE
WORK
We proposed an adaptive approach for simulating
elastic deformation of homogeneous and inhomoge-
neous objects based on FEM. A difficulty in using an
adaptive as well as multi-resolution approach for sim-
ulating inhomogeneous elastic deformation is that the
elasticity matrices of the elements in different levels
may have different values, because a parent element
Figure 12: Left column: The force is applied on the right
hand of the armadillo. Right column: The force is applied
on its left hand. Top and bottom rows show the results after
400 and 800 steps, respectively.
may contain the children elements with different stiff-
ness. Thus, we proposed a bottom-up sampling ap-
proach to estimate the elasticity matrices for the ele-
ments in coarse levelsfrom the children elements with
known elasticity matrices, so that a parent element
can consist of the children elements with different or
even continuously varying stiffness. Moreover, unlike
other typical adaptivesimulation methods, which sub-
divided the deforming object adaptively on the fly, we
moved the tedious tetrahedron subdivision to the off-
line preprocessing stage to ease the burden on the run-
time simulation. Furthermore, we presented an adap-
tive simulation scheme, which selects the appropriate
levels on the fly according to the error-threshold given
by the user and the strain posed on the elements.
Our approach is faster than existing method in
processing time in each time-step when coarser levels
are selected. In the worst case, the processing time is
still comparable to that of the existing methods. Since
Figure 13: The simulation of liver. The vessels(blue and
red) is stiffer than the other tissues.
AdaptivelySimulatingInhomogeneousElasticDeformation
243

we can estimate the elasticity matrices in the coarse
levels through a sampling approach, we believe that
we can also compute the viscosity constants in a sim-
ilar way.
REFERENCES
Baraff, D. and Witkin, A. (1998). Large steps in cloth sim-
ulation. In ACM SIGGRAPH 1998 Conference Pro-
ceedings, pages 43–54.
Capell, S., Green, S., Curless, B., Duchamp, T., and
Popovi´c, Z. (2002). A multiresolution framework for
dynamic deformations. In Proceedings of the 2002
ACM SIGGRAPH/Eurographics Symposium on Com-
puter Animation, pages 41–47.
Chentanez, N., Alterovitz, R., Ritchie, D., Cho, L., Hauser,
K. K., Goldberg, K., Shewchuk, J. R., and O’Brien,
J. F. (2009). Interactive simulation of surgical needle
insertion and steering. ACM Transactions on Graph-
ics, 28(3):88:1–88:10.
Debunne, G., Desbrun, M., Cani, M.-P., and Barr, A. H.
(2001). Dynamic real-time deformations using space
& time adaptive sampling. In ACM SIGGRAPH 2001
Conference Proceedings, pages 31–36.
Dequidt, J., Marchal, D., and Grisoni, L. (2005). Time-
critical animation of deformable solids. Computer An-
imation and Virtual Worlds, 16(3-4):177–187.
Faure, F., Gilles, B., Bousquet, G., and Pai, D. (2011).
Sparse meshless models of complex deformable
solids. ACM Transactions on Graphics, 30(4):73:1–
73:10.
Gibson, S. F. F. and Mirtich, B. (1997). A survey of de-
formable modeling in computer graphics. Technical
Report TR97-19, Mitsubishi Electric Research Labo-
ratories.
Grinspun, E., Krysl, P., and Schr¨oder, P. (2002). CHARMS:
a simple framework for adaptive simulation. ACM
Transactions on Graphics, 21(3):281–290.
Hoppe, H. (1996). Progressive meshes. In ACM SIG-
GRAPH 1996 Conference Proceedings, pages 99–
108.
Kharevych, L., Mullen, P., Owhadi, H., and Desbrun, M.
(2009). Numerical coarsening of inhomogeneous
elastic materials. ACM Transactions on Graphics,
28(51):51:1–51:8.
Lee, Y., Terzopoulos, D., and Waters, K. (1995). Realistic
modeling for facial animation. In ACM SIGGRAPH
1995 Conference Proceedings, pages 55–62.
Liu, A. and Joe, B. (1995). Quality local refinement of tetra-
hedral meshes based on 8-subtetrahedron subdivision.
SIAM Journal on Scientific Computing, 16(6):1269–
1291.
M¨uller, M., McMillan, L., Dorsey, J., and Jagnow, R.
(2001). Real-time simulation of deformation and frac-
ture of stiff materials. In Proceedings of the 2001
Eurographic Workshop on Computer Animation and
Simulation, pages 113–124.
Nealen, A., Muller, M., Keiser, R., Boxerman, E., and Carl-
son, M. (2006). Physically based deformable mod-
els in computer graphics. Computer Graphics Forum,
25(4):809–836.
Nesme, M., Kry, P. G., Jeˇr´abkov´a, L., and Faure, F. (2009).
Preserving topology and elasticity for embedded de-
formable models. ACM Transactions on Graphics,
28(3):52:1–52:9.
O’Brien, J. F. and Hodgins, J. K. (1999). Graphical model-
ing and animation of brittle fracture. In ACM SIG-
GRAPH 1999 Conference Proceedings, pages 137–
146.
Schaefer, S., Hakenberg, J., and Warren, J. (2004). Smooth
subdivision of tetrahedral meshes. In Proceedings of
the 2004 Eurographics/ACM SIGGRAPH Symposium
on Geometry processing, pages 147–154.
Shewchuk, J. R. (1998). Tetrahedral mesh generation by
Delaunay refinement. In Proceedings of the 14th An-
nual Symposium on Computational Geometry, pages
86–95.
Tu, X. and Terzopoulos, D. (1994). Artificial fishes:
physics, locomotion, perception, behavior. In ACM
SIGGRAPH 1994 Conference Proceedings, pages 43–
50.
Zienkiewicz, O., Taylor, R., Taylor, R., and Zhu, J. (2005).
The finite element method: its basis and fundamentals.
The Finite Element Method. Elsevier Butterworth-
Heinemann.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
244
