
Genetic Algorithm for Stereo Correspondence with a Novel Fitness
Function and Occlusion Handling
Alvaro Arranz
1
, Manuel Alvar
1
, Jaime Boal
1
, Alvaro Sanchez-Miralles
1
and Arturo de la Escalera
2
1
Insitute for Research in Technology (IIT), ICAI School of Engineering, C/ Alberto Aguilera 23, 28015 Madrid, Spain
2
Intelligent Systems Lab, University Carlos III of Madrid, C/ Butarque 15, 28911 Leganes, Madrid, Spain
Keywords:
Stereo Reconstruction, Genetic Algorithm.
Abstract:
This paper proposes a genetic algorithm for solving the stereo correspondence problem. Applied to stereo,
genetic algorithms are flexible in the cost function and permit global reasoning. The main contribution of this
paper is a new crossover and a mutation operator which accounts for occlusion management and a new fitness
function which considers occluded pixels and photometric derivatives. Both left and right disparity images
are analysed in order to classify occluded pixels correctly. The proposed fitness function is compared to the
traditional energy function based in the framework of the Markov Random Fields. The results show that a
32% bad-pixel error reduction can be achieved on average using the proposed fitness function. The results
have been uploaded to the Middlebury ranking webpage, as the first evolutionary algorithm evaluated.
1 INTRODUCTION
Passive stereo has received a huge amount of atten-
tion from the research community over the past two
decades. The first algorithms that dealt with the
stereo correspondence were sparse-feature based al-
gorithms. Considering that some applications would
find a per-pixel estimation of the disparity for the ref-
erence image more useful, dense stereo algorithms
started to show their value. New algorithms such
as global methods, dynamic programming, multi-
resolution, or cooperative algorithms soon appeared
to deal with dense disparity estimation. A taxonomy
and evaluation of the most important dense stereo al-
gorithms was proposed in (Alahari et al., 2010). This
paper presented a methodology for comparing dif-
ferent stereo algorithms incorporating a ranking sys-
tem (Middlebury, ).
Results shown in (Alahari et al., 2010) suggest
that global methods are the most accurate ones while
local methods are ideal for real-time applications due
to its simplicity and their parallelizable nature. How-
ever, new algorithms that outperform them, such as
(Mei et al., 2011), have been published. Generally
speaking, the best algorithms in the Middlebury rank-
ing use some kind of optimization process for global
reasoning followed by a refinement process for out-
liers and occluded pixels.
In this paper, a stereo algorithm using a genetic
optimization approach is proposed. The main contri-
butions are the occlusion handling procedure that is
included as a part of the genetic algorithm and the
proposed fitness function that is demonstrated to im-
prove the number of bad pixels in the solution.
This document is organized as follows. In 2,
previous genetic algorithms in stereo are briefly re-
viewed. In 3 detailed information about the genetic
algorithm proposed is given. 4 puts forward the ex-
periments carried out as well as a comparison be-
tween algorithms. Finally in 5 the main conclusions
are drawn.
2 GENETIC ALGORITHMS IN
STEREO
Genetic algorithms are a class of evolutionary algo-
rithms that have been widely used as an heuristic
search for optimization problems in a many differ-
ent applications. In (Saito and Mori, 1995) a genetic
algorithm is used to combine solutions of window-
based methods with different window sizes while
favouring photo-consistency and smoothness. In or-
der to reduce the size of the problem, it proposed
also to divide the solution into blocks and find op-
timal disparity maps block-by-block. The authors
in (Han et al., 2001) use a region extraction algo-
294
Arranz A., Alvar M., Boal J., Sanchez-Miralles A. and de la Escalera A..
Genetic Algorithm for Stereo Correspondence with a Novel Fitness Function and Occlusion Handling.
DOI: 10.5220/0004291202940299
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 294-299
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

rithm for dividing the image. Their fitness function
is made of an intensity similarity and a smoothing
term between regions. A multi-resolution approach
is proposed in (Gong and Yang, 2001) and (Gong
and Yang, 2002), where a quad-tree structure is used
for representing each individual. A Markov Random
Field (MRF) based fitness function for global reason-
ing is used. In (Wang et al., 2003) it is proposed to
use the whole disparity map as a representation of
genomes with no mutation operation. Recently, (Dai
et al., 2008) use an adaptive crossover and muta-
tion while their fitness function do not include any
smoothing term. Finally, (Zhang et al., 2009) use a
pyramidal propagation stratagem for solution repre-
sentation and (Nie et al., 2009) implement a stereo
correspondence genetic algorithm in GPU for perfor-
mance enhancement. Genetic algorithms have also
been used for matching sparse features, for instance
in (Issa et al., 2002) a genetic algorithm is employed
to match edges.
The utilization of genetic algorithms in stereo cor-
respondence has some advantages over other tradi-
tional methods. Firstly, genetic algorithms may op-
timize an energy function for some global reasoning.
In this sense it resembles to global methods based
on MRF such as graph-cuts (Kolmogorov and Zabin,
2004). It has the advantage of its flexibility, given that
practically any fitness function can be used, although
getting close to the optimum is not guaranteed. Sec-
ondly, unlike most global or local methods, genetic
algorithms can provide various local solutions during
the optimization process.
Our approach uses some of the ideas found in the
literature and proposes new crossover and mutation
operators. One of the main contributions of this paper
is that a method for occlusion handling is included
natively in the genetic algorithm, not only as a refine-
ment process. The disparity estimation is performed
on both right and left images. This permits to calcu-
late an occlusion map for both images, and treat oc-
cluded pixels and the common ones differently. The
new crossover proposed permits to make a combina-
tion of a large number of pixels at the same time while
favouring the child to inherit the best regions of both
parents. The new mutation operator radically changes
the disparity values of some regions to enable large
jumps in the solution space. Finally, another con-
tribution is the fitness function proposed, that really
achieves to optimize correctly the number of bad pix-
els in the image considering occlusions.
As mentioned before, (Middlebury, ) has become
one of the main resources for evaluation and com-
parison of stereo correspondence algorithms. Any of
the genetic stereo correspondence methods previously
cited neither used the standard set of stereo images,
nor compared their results with the state-of-the-art
stereo algorithms. In this paper a comparison between
several stereo methods is shown and results have been
uploaded to the ranking system in (Middlebury, ) for
future comparison.
3 PROPOSED ALGORITHM
Generally, stereo correspondence has been demon-
strated to be an ill-posed, NP-hard problem. More-
over, considering a common size image of 400 by 300
pixels and sixty different disparity labels, the num-
ber of different possible solutions is completely over-
whelming. A naive implementation of a genetic al-
gorithm, with highly random disparity assignments
to each pixel, does not perform correctly due to the
fact that almost any random disparity image does not
even make sense as an image. Hence, due to the huge
search space involved in stereo correspondence, prop-
erly guiding the genetic algorithm towards feasible
disparity maps is fundamental to make the algorithm
computationally tractable.
In the following subsections the genetic stereo
correspondence algorithm proposed in this paper is
explained in more detail.
3.1 Genome Representation
The most remarkable genome representations used in
the literature are the quad-tree and the disparity map
representation. Given that, in the method herein pro-
posed, no multi-resolution is used and the disparity
map representation makes it easier to compute the fit-
ness function, the whole disparity map representation
has been chosen. An important novelty is to include
both left and right disparity images in the genome rep-
resentation.
¯g
¯g
L
=
{
X
1
L
,X
2
L
,...,X
N
L
}
¯g
R
=
{
X
1
R
,X
2
R
,...,X
N
R
}
, X
i
∈
{
L
1
,L
2
,...,L
k
}
(1)
where g is the genome, g
L
and g
R
are the representa-
tion of the left and right disparity images respectively,
X
i
L
and X
i
R
are the disparities estimated for pixel i on
the left and right disparity images respectively, N the
total number of pixels in each image and L
i
the set of
labels representing the set of disparities analysed.
3.2 Initialization
Some algorithms in the literature use random sam-
pling for their initialization process. The probability
GeneticAlgorithmforStereoCorrespondencewithaNovelFitnessFunctionandOcclusionHandling
295

of each pixel having a certain disparity value is based
on a photo-consistency measurement. Others use a
solution of other local window-based algorithm with
a random window size. This approach is similar to the
one proposed in (Saito and Mori, 1995) with the main
difference that the disparity range is not restricted to
the range obtained by the local methods.
For the initialization process we have used
two different window-based algorithms with differ-
ent window sizes, the adaptive support-weight ap-
proach (Yoon and Kweon, 2006) with random pa-
rameters and the census based with window-cost ag-
gregation. For the census transform, a constant win-
dow size of 9x7 was used as suggested in (Mei et al.,
2011). During the initialization process, each pixel is
sampled with a probability proportional to the times it
has appeared in the local window-based algorithms. It
is important to notice that either algorithm alone per-
forms well in discontinuities, occluded or untextured
areas.
3.3 Fitness Function
As the stereo correspondence problem can be formu-
lated as a MRF, the fitness function will be assigned
the related energy value of the left disparity image. A
classical formulation is given by the following equa-
tions
E
classic
( ¯g) = E
data−classic
( ¯g
L
) + E
smooth−classic
( ¯g
L
)
(2)
E
data−classic
( ¯g
L
) =
∑
i∈ ¯g
L
|
I
L
(x
i
,y
i
) − I
R
(x
i
− X
i
,y
i
))
|
(3)
E
smooth−classic
( ¯g
L
) =
∑
{
p,q
}
∈N
V
{
p,q
}
(X
p
,X
q
) (4)
where g is a certain individual, g
L
is the left dispar-
ity image, I
l
and I
r
stand for the left and right stereo
pair, x
i
and y
i
are the image coordinates of pixel i, and
V
{
p,q
}
is a smoothing function favouring the neigh-
bouring pixels having the same disparity.
This energy configuration has been widely used in
the literature by global stereo algorithms. It is sim-
ple and it can be optimized by heuristic algorithms
such as graph-cuts (Kolmogorov and Zabin, 2004).
As stated in (Kolmogorov and Zabin, 2004), not any
function can be used for this purpose.
The classic energy function might present some
problems in the disparity estimation along the discon-
tinuities and the occluded areas. Due to the flexible
nature of the genetic algorithms, other more compli-
cated functions can be chosen as fitness functions.
Herein, an energy function that considers discontinu-
ities and occlusions for the energy evaluation is pro-
posed:
E ( ¯g) = E
data
( ¯g
L
) + E
smooth
( ¯g
L
) (5)
E
data
( ¯g
L
) =
λ
d
if i is occluded
∑
i∈ ¯g
L
|I
L
(x
i
,y
i
)−
I
R
(x
i
− X
i
,y
i
))|
otherwise
(6)
E
smooth
( ¯g
L
) =
∑
{
p,q
}
∈N
β
s
ϕ
s
|X
p
− X
q
| (7)
β
s
= max(λ
s
,γ
s
− |I
L
(p) − I
L
(q)|) (8)
where λ
s
, γ
s
and ϕ
s
are constant parameters for every
pixel.
The main modification in the E
data
term is that
occluded pixels, as they do not have a correspondent
pixel on the right image, contribute to the energy with
a constant value λ
d
. This enables low energy config-
urations where the occluded pixels are matched cor-
rectly.
This new smooth function establishes a relation
between the colour consistency of the neighbours and
the associated weight of their disparity difference. For
neighbouring pixels that are very different in colour,
low weight is assigned to their disparity difference,
while neighbouring pixels that are very similar are
forced to have the same disparity.
At this point it is very important to emphasize
that in any case the genetic algorithm, neither using
the classic energy function nor the proposed one, is
guaranteed to find the optimum energy configuration.
Even more, how close we can get to the optimum will
depend on the fitness function, the crossover and mu-
tator operators, their parameters, the population size,
etc. Probably, in any case the genetic algorithm will
get close to the optimum, but the experiments carried
out and shown in 4, suggest that the proposed energy
function is more adequate than the classic one for both
discontinuity and occlusion management.
3.4 Crossover
On first place, our method employed as a crossover
algorithm that is very similar to the uniform crossover.
For each crossover, a random block size is selected
representing a region on each disparity image g
L
and
g
R
. Then, a random assignation of each parent block
to the children is performed.
While this stochastic approach to the crossover
operation is inherent to the genetic algorithms, some
tests with a deterministic crossover were also carried
out. A new crossover was defined, instead of assign-
ing the blocks to the sons randomly, first it evaluates
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
296

the fitness function on each parent block and then
put the blocks with the best fitness function on the
same son. In this sense, this approach contradicts the
stochastic nature of the genetic algorithm and might
involve getting stuck in local minima. However, after
testing both approaches, the deterministic crossover
achieved a lot better fitness function than the stochas-
tic one, so this one was used on our final tests. This is
also suggested in (Wang et al., 2003).
3.5 Mutation
Three different mutation operations that may occur to
each individual have been defined. Firstly, one pos-
sible mutation operation is to initialize again some
pixels of one of the left or right images following
the steps explained in 3.2. That is, the disparity of
the pixel is changed stochastically with a probabil-
ity proportional to those suggested by local methods.
This mutation operation may happen with a probabil-
ity P
Ma
.
Secondly, a median filter operation with a random
window size is also performed as a mutation function.
It is not any novelty, but sometimes it is effective for
managing some sparse outliers. This median filter op-
eration is performed with a probability P
Mb
.
Finally, an occlusion detection and handling is
also included as a mutation with probability P
Mc
. This
process is a two step operation: an occlusion detec-
tion followed by an occlusion management. Given
that both left and right disparity images are being es-
timated by our algorithm, we can use the right image
disparities to estimate which pixels cannot have pos-
sible matches on the left one and vice-versa. The fol-
lowing operations are defined for calculating the left
occlusion map:
O
L
(p) =
0 ∃i/
x(i) + ¯g
R
(i)
y(i)
=
x(p)
y(p)
p,i ∈ P
1 otherwise
(9)
being O
L
the left occlusion map, x(p) and y(p) the x
and y coordinates of point p respectively and P the set
of disparity image points.
Similarly, an expression for the right occlusion
map for the right image is:
O
R
(p) =
0 ∃i/
x(i) − ¯g
L
(i)
y(i)
=
x(p)
y(p)
p,i ∈ P
1 otherwise
(10)
being O
R
the right occlusion map.
Once the occlusion maps are calculated for both
images, a very simple occlusion management is per-
formed. We follow an iterative process based on
the neighbouring disparities of the occluded pixels.
For the left image, each occluded pixel is assigned
the disparity value of the most photo-consistent non-
occluded neighbour from left to right and afterwards
it is marked as non-occluded. If no non-occluded
neighbours exist, it maintains its occluded status for
the next iteration. Special status have the occluded
pixels whose x(p) coordinate is less than the number
of disparities analysed. In this case the iteration is
made from right to left and bottom-up. The iteration
is finished when no occluded pixels are left on the left
occluded map.
For the right image it is similarly done but vice
versa (right to left for common pixels and left to right
for pixels whose x(p) is at a distance of the number
of disparities analysed from the right image border).
This fast an simple algorithm demonstrates to be ef-
fective in 4.
4 EXPERIMENTAL RESULTS
The genetic algorithm proposed has been applied to
solve the Middlebury standard stereo dataset in (Mid-
dlebury, ) that consists of four images. The param-
eters used related with the new energy function pro-
posed are shown in 1, while the parameters related
with the genetic algorithm are shown in 2. For local
methods, window sizes between 3 and 45 have been
used and random values for the adaptive-weight pa-
rameters. All the test-cases were run using the same
parameters.
The resulting left disparity images with their bad
pixels percentage image representation are shown in 1
and 2. Looking to the bad-pixel images, it is clear
that Tsukuba and Venus obtain the best results. Al-
though the algorithm performs quite well all along
non-occluded and discontinuity regions, in other ar-
eas such as untextured regions it fails substantially.
This can be attributed to the fact that the local algo-
rithms used in the initialization process also fail in
these untextured regions, so the genetic algorithm is
unable to generate individuals with proper disparities
on that region.
All four images were uploaded and evaluated us-
ing the Middlebury web-site. The algorithm achieved
an average rank of 38.5 and an average percent of bad
pixels of 5.81. This is an improvement over, for exam-
ple, the adaptive-weight algorithm used for its initial-
ization step which has an average rank of 61.4 and an
average percent of bad pixels of 6.67. Moreover, the
proposed genetic algorithm achieved the best rank in
the discontinuity areas of the Tsukuba image. Com-
GeneticAlgorithmforStereoCorrespondencewithaNovelFitnessFunctionandOcclusionHandling
297

Figure 1: Tsukuba and Venus results. Disparity images
(first row) and bad pixels (second row)
paring the proposed algorithm to the best reported
one (Mei et al., 2011), our algorithm performs 1.84%
worse. This can be attributed mainly to the untex-
tured regions already explained where the local meth-
ods fail considerably.
Table 1: Parameters for the new energy function
λ
d
λ
s
γ
s
ϕ
s
10.0 50.0 2.0 10.0
Table 2: Parameters for the genetic algorithm.
Population Generations P
c
ross P
Ma
P
Mb
P
Mc
50.0 1000 0.9 0.1 0.1 0.5
In order to evaluate the performance of the energy
functions described in 3.3, some tests were carried out
using exactly the same genetic algorithm but applying
the classic energy formulation as fitness function in-
stead. The truncated linear function was used for the
smoothing function with a cost of 1.0 and a truncation
value of 10.0. The results were uploaded to the Mid-
dlebury stereo web-page, following the same steps as
in the previous case. The average percent of bad pix-
els increases from 5.81 to 8.56, which is near 3 more
bad pixel percentage error if the classic energy func-
tion is used.
The evolution of each energy function during the
optimization process compared to the bad-pixels error
measurement for Tsukuba stereo pair is shown in 3.
The image on the first row shows the whole energy
which is being minimized during the first 500 gener-
ations. Both algorithms follow a similar descendant
curve. However, they cannot be compared in terms
of the minimum energy achieved given that different
functions and parameters are used.
The image on the second row shows the evolution
Figure 2: Teddy and Cones results. Disparity images (first
row) and bad pixels (second row).
of the bad-pixels measurement of the best individual
for each population. These charts were selected be-
cause they show empirically how the real disparity er-
ror evolves when each energy function is minimized.
3 shows that a reduction of the classic energy func-
tion not always translates into an effective reduction
of the bad-pixels. Actually, in this test-case it pro-
duces some kind of unstable behaviour. The experi-
ments carried out with the rest of the stereo pairs show
the same trend. Meanwhile, using the energy func-
tion proposed, a much more stable behaviour and a
much better final error for all the tests carried out is
obtained.
However, it is important to notice that it cannot
be stated that the proposed energy function represents
the real disparity images better, i.e. the true disparity
images obtain lower energy values than others. Ge-
netic algorithms work fine for finding good approxi-
mations to real optimum values only when all the ge-
netic operators are well set. It cannot be guaranteed
that the genetic algorithm will perform better using
the proposed energy function for any genetic configu-
ration. Neither can be guaranteed that the optimum in
one case has less error than the optimum in the other
case. However, this trend has appeared in every tests
carried out.
5 CONCLUSIONS
A new genetic algorithm has been proposed for stereo
correspondence. Applying genetic algorithms has
some benefits such as global reasoning and unre-
stricted fitness function. The contributions of this pa-
per, is twofold. Firstly, compared to other genetic al-
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
298
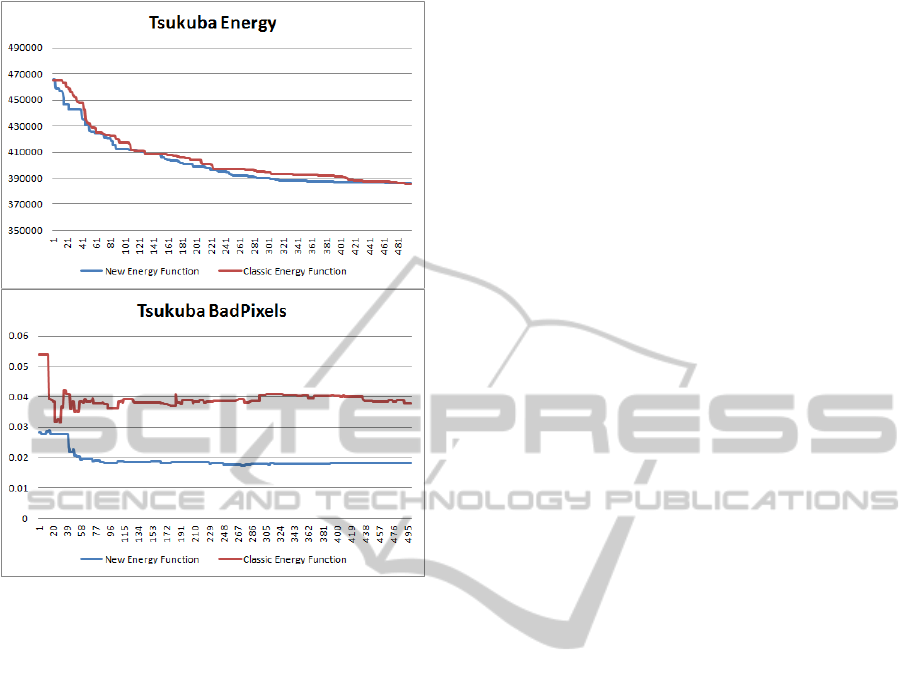
Figure 3: Evolution of the energy functions and the bad-
pixels in Tsukuba.
gorithms previously proposed, it uses new crossover
and mutation operators that account for occlusion
handling. Both left and right disparity images are esti-
mated in order to manage occlusions adequately. Sec-
ondly, it has been proposed and analysed a new en-
ergy function that includes occluded pixels handling
in the formulation and enables depth discontinuities
on pixels with high photometric derivatives.
The genetic algorithm has been evaluated using
the standard Middlebury stereo dataset using both
classic and proposed energy functions. Our imple-
mentation outperformed the classical one in 2.75 of
bad pixels percentage on average, which represents a
32% error reduction using the new energy function.
Moreover, an analysis of the evolution of the bad-
pixels error measurement suggests that the new for-
mulation is more adequate for representing real dis-
parities. The algorithm proposed was rated with an
average rank of 38.5 in the Middlebury ranking and
as far as we know, is the first evolutionary algorithm
included on this table.
REFERENCES
Alahari, K., Kohli, P., and Torr, P. H. S. (2010). Dy-
namic hybrid algorithms for map inference in dis-
crete mrfs. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 32(10):1846–1857.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast ap-
proximate energy minimization via graph cuts. IEEE
Transactions On Pattern Analysis And Machine Intel-
ligence, 23(11):1222–1239.
Dai, C., Wu, X., and Liu, J. (2008). Stereo matching using
adaptive genetic algorithm. In Audio, Language and
Image Processing, 2008. ICALIP 2008. International
Conference on, pages 1225–1228.
Gong, M. and Yang, Y.-H. (2001). Multi-resolution stereo
matching using genetic algorithm. In Stereo and
Multi-Baseline Vision, 2001. (SMBV 2001). Proceed-
ings. IEEE Workshop on, pages 21–29.
Gong, M. and Yang, Y.-H. (2002). Genetic-based stereo
algorithm and disparity map evaluation. International
Journal of Computer Vision, 47(1):63–77.
Han, K.-P., Song, K.-W., Chung, E.-Y., Cho, S.-J., and Ha,
Y.-H. (2001). Stereo matching using genetic algo-
rithm with adaptive chromosomes. Pattern Recogni-
tion, 34(9):1729–1740.
Issa, H., Ruichek, Y., and Postaire, J. G. (2002). Stereo cor-
respondence using a genetic scheme with a new solu-
tion encoding. In Systems, Man and Cybernetics, 2002
IEEE International Conference on, volume 6, page 5
pp. vol.6.
Kolmogorov, V. and Zabin, R. (2004). What energy func-
tions can be minimized via graph cuts? Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
26(2):147–159.
Mei, X., Sun, X., Zhou, M., Jiao, S., Wang, H., and Zhang,
X. (2011). On building an accurate stereo matching
system on graphics hardware. In Computer Vision
Workshops (ICCV Workshops), 2011 IEEE Interna-
tional Conference on, pages 467 –474.
Middlebury. http://vision.middlebury.edu/stereo/.
Nie, D.-H., Han, K.-P., and Lee, H.-S. (2009). Stereo
matching algorithm using population-based incremen-
tal learning on gpu. In Intelligent Systems and Appli-
cations, 2009. ISA 2009. International Workshop on,
pages 1–4.
Saito, H. and Mori, M. (1995). Application of genetic algo-
rithms to stereo matching of images. Pattern Recog-
nition Letters, 16(8):815–821.
Wang, B., Chung, R., and Shen, C.-L. (2003). Ge-
netic algorithm-based stereo vision with no block-
partitioning of input images. In Computational Intel-
ligence in Robotics and Automation, 2003. Proceed-
ings. 2003 IEEE International Symposium on, vol-
ume 2, pages 830–836 vol.2.
Yoon, K. J. and Kweon, I. S. (2006). Adaptive support-
weight approach for correspondence search. Ieee
Transactions On Pattern Analysis And Machine Intel-
ligence, 28(4):650–656.
Zhang, Z., Hou, C., and Yang, J. (2009). A stereo match-
ing algorithm based on genetic algorithm with prop-
agation stratagem. In Intelligent Systems and Appli-
cations, 2009. ISA 2009. International Workshop on,
pages 1–4.
GeneticAlgorithmforStereoCorrespondencewithaNovelFitnessFunctionandOcclusionHandling
299
