
Weighted Joint Bilateral Filter with Slope Depth Compensation Filter for
Depth Map Refinement
Takuya Matsuo, Norishige Fukushima and Yutaka Ishibashi
Graduate School of Engineering, Nagoya Institute of Technology, Gokiso-cho, Showa-ku, Nagoya 466-8555, Japan
Keywords:
Depth Map Refinement, Stereo Matching, Depth Sensor, Weighted Joint Bilateral Filter, Real-time Image
Processing.
Abstract:
In this paper, we propose a new refinement filter for depth maps. The filter convolutes a depth map by a
jointly computed kernel on a natural image with a weight map. We call the filter weighted joint bilateral filter.
The filter fits an outline of an object in the depth map to the outline of the object in the natural image, and it
reduces noises. An additional filter of slope depth compensation filter removes blur across object boundary.
The filter set’s computational cost is low and is independent of depth ranges. Thus we can refine depth maps
to generate accurate depth map with lower cost. In addition, we can apply the filters for various types of
depth map, such as computed by simple block matching, Markov random field based optimization, and Depth
sensors. Experimental results show that the proposed filter has the best performance of improvement of depth
map accuracy, and the proposed filter can perform real-time refinement.
1 INTRODUCTION
Recently, image processing with depth maps (e.g.
pose estimation, object detection, point cloud pro-
cessing and free viewpoint video rendering) attracts
attentions, and releases of consumer-level depth sen-
sors (e.g. Microsoft Kinect and ASUS Xtion) ac-
celerate the boom. In these applications, accurate
depth maps are required. Especially, the free view-
point image rendering requires more accurate depth
maps (Fukushima and Ishibashi, 2011). The free
viewpoint images are often synthesized by depth im-
age based rendering (DIBR) (Mori et al., 2009) that
demands input images and depth maps.
Depth maps are usually computed by stereo
matching with stereo image pair. The stereo matching
finds corresponding pixels between left and right im-
ages. The depth values are computed
from disparities
of the correspondence. The stereo matching consists
of four steps that are matching cost computation, cost
aggregation, depth map computation/optimization
and depth map refinement (Scharstein and Szeliski,
2002).
Depth maps computed by stereo matching meth-
ods tend to have invalid depth value around object
edges and contain spike/speckle noise. To obtain ac-
curate depth maps, most of the stereo matching meth-
ods perform an optimization to improve the accuracy
of the depth map.
The optimization methods based on Markov ran-
dom field/conditional random field (e.g. dynamic pro-
gramming (Ohta and Kanade, 1985), multi-pass dy-
namic programming (Fukushima et al., 2010), semi-
global block matching (Hirschmuller, 2008), belief
propagation (Sun et al., 2003) and graph cuts (Boykov
et al., 2001)), generate accurate depth maps, while
these complex optimizations consume much time.
The computational cost depends on search range of
depths or disparities. The computational order is usu-
ally O(d), O(d logd) or O(d
2
), where d is search
range of disparities/depths. In addition, the strong
constrains of the smoothness consistency in the op-
timizations tend to obscure local edges of the depth
map. (Wildeboer et al., 2010) solves the problem by
using manual user inputs which indicate object edges.
To make real-time stereo matching, we can se-
lect light weight algorithms, but its accuracy does not
reach well optimized approaches, so depth map at ob-
ject boundaries will be invalid and large noises will
appear. Thus, computational cost and accuracy are
trade-off problem,
Depth sensors, including IR signal pattern projec-
tion based and Time of Flight (ToF) based sensors,
also generate depth maps. These devices can cap-
ture more accurate depth maps, but they cannot cap-
ture natural RGB images. To capture RGB images,
300
Matsuo T., Fukushima N. and Ishibashi Y..
Weighted Joint Bilateral Filter with Slope Depth Compensation Filter for Depth Map Refinement.
DOI: 10.5220/0004292203000309
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 300-309
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
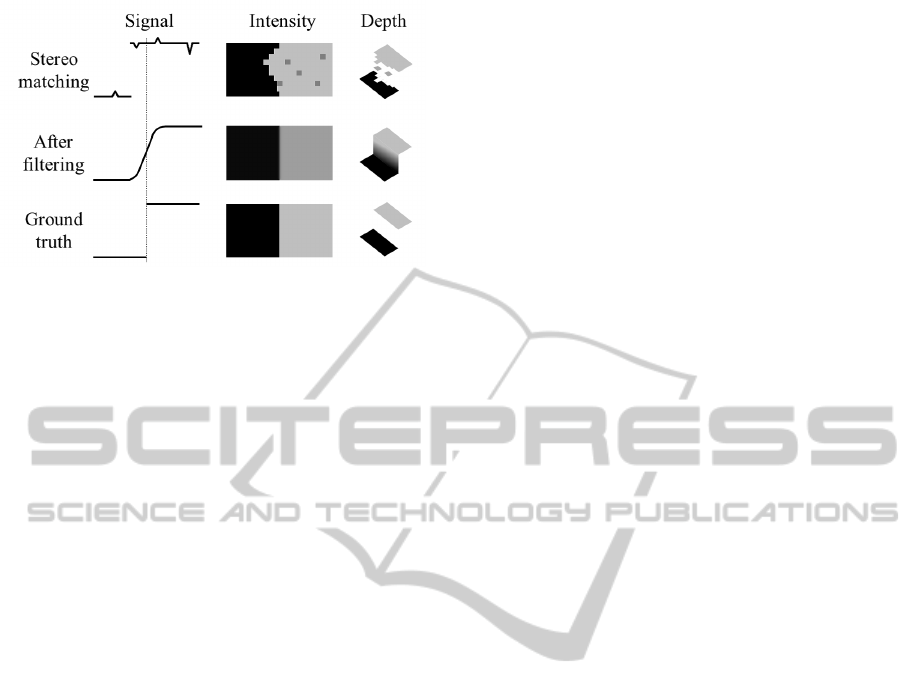
Figure 1: Effect of depth map refinement.
an additional CCD sensor is required. In addition
depth map-image registration is required because sen-
sors’ positions are different. However,the registration
tends to be violated at object boundaries.
In the real-time stereo matching and the depth sen-
sor acquisition, both methods require noise reduction,
object boundaries recovering are required. Therefore,
to correct the depth at object boundary, and to remove
noise on depth maps, we propose a refinement filter
for depth maps from stereo image pair or depth sen-
sors. For real-time applications, we keep the compu-
tational cost of the filter low.
The rest of this paper is organized as follows.
Sec. 2 describes related works of refinement filters.
Proposed methods are presented in Sec. 3, and exper-
imental results are shown in Sec. 4. Sec. 5 concludes
this paper.
2 RELATED WORKS
Recently, depth map refinement filters are focused.
Requirements for the refinement filter are; capability
of edge correction, noise reduction, and edge keeping.
Figure 1 shows the effect of depth map refinement.
Input depth signals are noisy and edge at boundary
is not correct. After refinement filter, noise on depth
signal is removed and depth at boundary is corrected.
However unwanted slope blur at the boundary occurs.
The slope means that object boundary is smoothly
connected, but this is a fake signal. Thus keeping the
blur size small or removing the blur is important for
the refinement.
The depth map refinement filters are often edge-
preserving filter, e.g. median filter. Bilateral fil-
ter (Tomasi and Manduchi, 1998) is an early approach
of them. The bilateral filter can remove noise while
preserving edges, but the performance of edge keep-
ing and noise reduction is trade-off. When the im-
age has large noises, the performance of edge keep-
ing becomes low to remove the noises. In addi-
tion, only Gaussian noise can be removed by the fil-
ter, although depth map contains spike, speckle/blob
and non-Gaussian noises. Moreover, the inaccuracy
around object boundaries cannot be correct well.
Now, a variant called joint bilateral filter (or cross
bilateral filter) (Pestschnigg et al., 2004; Eisemann
and Durand, 2004; Kopf et al., 2007) relaxes bilat-
eral filter’s problem well by adding additional infor-
mation. The information is an original RGB im-
age used in depth estimation. This method regards
the depth map as a filtering target, and the original
RGB image as a kernel computation target. The fil-
ter makes the kernel by color or intensity values of
the RGB image instead of depth values. The filter
can smooth small non-Gaussian noises. In addition
the filter can fit edges in the depth map around an
object to edges in the natural image’s object. How-
ever, the joint depth and image processing make a
new problem. The joint bilateral filter spreads blur-
ring to the outside of the depth map due to mixed
pixels, and outliers. Mixed pixels in natural images
occur on foreground and background boundaries and
they are caused by CCD sensor’s aliasing and optical
lens blur. The joint bilateral filter transfers the blur
to the depth map. In addition, impulse outliers and
large size noises on the depth map are diffused by the
filtering.
Some methods can reduce this type of the blur
in some degree. Multilateral filter (Lai et al., 2010)
has three weights which are space, color and addi-
tional depth weight. The depth weight wants to keep
the shape of the edge of the depth map so that the
weight suspends blurring. Unfortunately, the weight
also loses an ability of the object boundary recover-
ing.
Cost volume based refinement filter (Yang et al.,
2007) and its speedup approximation (Yang et al.,
2010) have better performance. The methods can cor-
rect depth edge and can remove spike noise and small
size speckle noise without diffusion. In addition the
method hardly generates blur at object boundaries. In
the processing of the cost volume filter, cost slices
which indicate every possibility of a depth value at
each pixel is computed, and all slices of each depth
level are stacked. The set of stacked slices are called
cost volume. Then, each slice is filtered by the joint
bilateral filter slice by slice at each depth level. The
possibility is computed by a difference between an
initial depth and each depth level values. The method
performs d (depth search range) times bilateral filters,
and also iterates the multiple bilateral filtering pro-
cess. Thus the method consumes a lot of time.
The refinement filter which meets all requirements
WeightedJointBilateralFilterwithSlopeDepthCompensationFilterforDepthMapRefinement
301

is only cost volume refinement, but it is cost consum-
ing. Thus a fast filter which meets all requirements is
an open question. Therefore, we present a new refine-
ment filter to remove impulse/speckle noises, recover
object shapes and suppress the blurs with low com-
putational cost. The refinement contains two filters;
one is weighted joint bilateral filter which is a variant
of joint bilateral filter and can reduce the boundary’s
blurs size, and the other is the slope depth compensa-
tion filter which eliminates depth slopes or blurs be-
tween a foreground and background objects.
3 PROPOSED FILTER
3.1 Weighted Joint Bilateral Filter
Our filter can reduce noises and correct object bound-
aries without large blur by using an input natural im-
age and a depth map. The filter is a variant of the joint
bilateral filter, and we call the filter weighted joint bi-
lateral filter (WJBF).
We add a weight factor to the joint bilateral filter.
The filter is defined by the following formula:
D
p
p
p
=
∑
s
s
s∈N
w(p
p
p, s
s
s)c(I
p
p
p
, I
s
s
s
)R
s
s
s
D
s
s
s
∑
s
s
s∈N
w(p
p
p, s
s
s)c(I
p
p
p
, I
s
s
s
)R
s
s
s
, (1)
w(x
x
x, y
y
y) = e
−
1
2
(
||x
x
x−y
y
y||
2
σ
s
)
, c(x
x
x, y
y
y) = e
−
1
2
(
||x
x
x−y
y
y||
2
σ
c
)
,
where p
p
p = coordinate of current pixel, s
s
s = coordinate
of support pixel centered around pixel p
p
p, I = input nat-
ural image, D = input/output depth map, N = aggre-
gating set of support pixel s
s
s, w = spatial kernel weight
function, c = color/range kernel weight function, and
each weight function is Gaussian distribution (σ
s
, σ
c
:
const.). || · ||
2
is L2 norm function, and R
s
s
s
= weight
map. This filter is an equivalent joint bilateral filter
except for the weight map R. If the weight map is
uniform, for example all values of the weighted map
are set to 1, the weighted joint bilateral filter becomes
the joint bilateral filter.
The Eq. (1) is separated into 2 parts; one is a ker-
nel weighting part and the other is a weighting of val-
ues of filtering target part. The former is w and c, and
the latter is R. The value’s weight R controls amount
of influence of depth value on a pixel and is fixed over
the image filtering. Thus we should set high weight at
a pixel which has a reliable depth value.
We want to set the joint bilateral kernel weight of
support pixels on another object to no weight. In the
joint bilateral filter case, the kernel weight between a
current pixel locates on an object boundary and sup-
port pixel on another object tend to have medium ker-
nel weight due to a mixed pixel on the object bound-
ary.
(a) Input natural image (b) Input depth map
(c) Speckle mask (d) Weight map
Figure 2: Example of weight map.
The unwanted weight causes blurs on the depth
map near the object boundary. The depth values
around the object discontinuities are unreliable, so we
should set the weight of the depth value R to low.
In addition, impulse outliers or outliers in speck-
les/blobs are unreliable. Small speckles may be miss
estimated regions. The region should be set to no
weight. Figure 2(b) shows an example of impulse or
speckles/blobs in a depth map. If we cannot ignore
these regions, the regionsof speckle noise are diffused
by a smoothing filter. Basically, the object bound-
ary and the speckle region adversely affect depth map
refinement. Thus we make a weight value for every
pixel, which is a weight map R, in advance to softly
ignore the ambiguous regions of the object boundary
and the speckle region.
In the weight map computation process, we clas-
sify pixels into located around object boundaries or
not, and speckle noise or not pixels. The result of
the soft classification is represented by weighting val-
ues. In the classification process, we have two as-
sumptions: First, if there is no boundary between the
current pixel and the support pixel, both pixels are
located at the same object. In this case, the depth
value and the intensity/color of the current pixel are
similar to these of the support pixels. Second, if
size of a connected component is small, the region
is speckle noised. In the connected component, dif-
ference among depth values is low.
Under the assumptions, the weight value R at s
s
s is:
R
s
s
s
=
∑
s
s
s∈N
′
M
s
s
s
· w(s
s
s, q
q
q)c(I
s
s
s
, I
q
q
q
)e
−
1
2
(
||D
s
s
s
−D
q
q
q
||
2
σ
r
)
, (2)
where q
q
q = coordinate of support pixel centered around
pixel s
s
s, N
′
= aggregating set of support pixel q
q
q,
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
302

w(s
s
s, q
q
q) and c(I
s
s
s
, I
q
q
q
) are same functions as (1). How-
ever, equation (2) has an additional term of the dif-
ference of the depth values between the current and
the support pixel. M
s
s
s
is a speckle region mask. The
speckle mask has two weight values which is 0 and 1.
The areas of weight value 0 are the speckle regions,
and the areas of weight value 1 are non-speckle re-
gions.
The first assumption is calculated by distance
of the intensity and the depth value of between
the current pixel and the support pixels. The sec-
ond assumption of the speckle regions is represented
by the speckle mask. This mask is made by the
initial depth map using the speckle detection fil-
ter. The speckle detection filter has two parameters.
They are upper threshold of speckle component size
(speckleWindowSize) and allowable difference range
in the speckle (speckleRange). The speckle detection
filter judges region to be a speckle by whether or not
the region size is smaller than the speckle window
size and the region value is larger than the speckle
range. If some areas judged the speckle regions by
the speckle detection filter in the initial depth map,
the weight of the speckle region is set to 0.
Figure 2 shows examples of an input image, a
noisy depth map, a speckle mask and a weight map. If
regions are speckled pixels, the speckle regions have
no weight. If not, all value of M
s
s
s
is set to 1, so the
weight map has some weight values. As a result,
boundary regions in the images and the depth map
have small weight. We can softly ignore boundary’s
depth values and speckle’s depth values, therefore,
the weighted bilateral filter with the weight map can
suppress boundary blur, can correct image boundary
well, and can reduce the speckle noises.
In the brute force computation of the filtering a
pixel has the fourfold loops (vertical and horizon-
tal filtering kernel and vertical and horizontal weight
map kernel loops), but the weight map is constant in
Eq. (1). Thus we compute the weight map before the
weighted joint bilateral filtering for effective compu-
tation.
3.2 Slope Depth Compensation Filter
The weighted joint bilateral filter refines accuracy
around boundaries and smoothness on flat regions,
but subtle blurs still remain in such cases, e.g. dif-
ference between foreground and background color
is small, and/or difference between foreground and
background depth value is large. The depth values
around the boundary are usually almost binary (fore-
ground/background); thus averaged depth values are
not suitable. The blurs make slopes between the fore-
(a) Tsukuba (b) Venus
(c) Teddy (d) Cones
Figure 3: Middlebury’s data sets.
ground and background depths. They do not exist
in the real environment. Consequently, these slopes
should be removed. We propose a new filter called
Slope depth compensation filter (SDCF).
The filter is defined by the following formula:
D
SDCF
p
p
p
= D
INIT IAL
v
v
v
(3)
s.t. v
v
v = argmin
s∈W
||D
WJBF
p
p
p
− D
INITIAL
s
s
s
||
2
,
where D
X
is the depth map estimated by a method
X ∈ {INITIAL, WJBF, SDCF} , W is the aggregation
set of a support pixel, | · |
2
means L2 norm function,
p
p
p is target pixel position, s
s
s is support pixel position,
and v
v
v is a pixel position which points the minimum of
the function.
This filter replaces the values blurred by the
weighted joint bilateral filter as the nearest values
in the support region on the no filtered version of
D
INIT IAL
. There are not mixed values in no filtered
version so that the filter completely removes blended
values.
At first, the depth map D
INIT IAL
is obtained by a
stereo matching method, and then the depth map is
filtered by the weighted joint bilateral filter (output is
written as D
WJBF
), and finally the depth map is com-
pensated by depth slope compensation filter (D
DSCF
).
4 EXPERIMENTAL RESULTS
4.1 Experimental Setups
We evaluate the weighted joint bilateral filter (WJBF)
with the slope depth compensation filter (SDCF). The
WeightedJointBilateralFilterwithSlopeDepthCompensationFilterforDepthMapRefinement
303
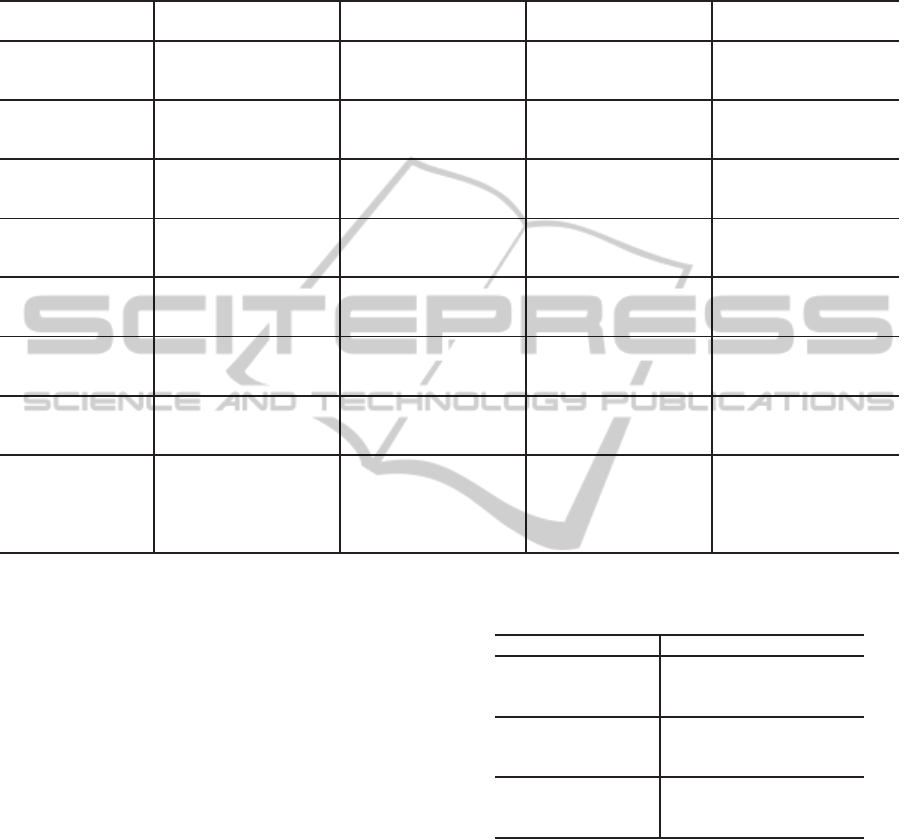
Table 1: Error Rate (%) of depth maps: Results of various stereo matching methods (block matching (BM), dynamic program-
ming (DP), semi-global block matching (SGBM), efficient large scale stereo (ELAS), and double belief propagation (DBP))
with proposed filter or refinement filters (median filter (MF), bilateral filter (BF), joint bilateral filter (JBF), multi lateral filter
(MLF), and filter in constant space belief propagation (CSBP)).
Tsukuba Venus Teddy Cones
nonocc all disc nonocc all disc nonocc all disc nonocc all disc
BMh 10.78 12.22 20.03 12.58 13.79 23.06 16.17 24.25 29.89 7.76 17.19 20.01
BMh & WJBF
3.39 4.21 13.95 1.69 2.60 13.66 12.18 20.63 24.04 3.94 12.38 11.78
BMh & Proposed 3.25 4.04 13.15 1.36 2.07 9.51 9.20 17.55 20.20 3.03 11.38 9.04
BMm 7.50 8.75 18.84 5.01 5.96 16.49 12.36 18.10 24.94 5.56 11.54 15.47
BMm & WJBF 3.14 3.78 14.59 2.62 3.17 8.52 10.09 15.84 21.84 4.57 10.43 13.67
BMm & Proposed
2.89 3.45 13.29 1.49 1.94 4.22 8.79 14.24 19.22 3.13 8.53 9.21
BMl 4.60 5.93 17.99 2.08 2.91 16.11 10.63 15.51 26.43 4.97 10.46 14.31
BMl & WJBF 2.69 3.20 12.57 1.51 2.14 9.55 9.41 14.41 22.56 4.61 10.08 13.52
BMl & Proposed
2.54 3.25 11.53 1.03 1.50 5.11 8.90 13.71 21.05 3.25 8.43 9.62
DP 4.12 5.04 11.95 10.10 11.03 21.03 14.00 21.58 20.56 10.54 19.10 21.10
DP & WJBF
2.63 3.40 11.12 6.77 7.17 20.65 9.81 17.12 18.44 7.98 15.92 18.49
DP & Proposed 2.49 3.22 10.74 6.01 6.36 18.12 9.22 16.53 16.98 7.12 15.64 16.05
SGBM 3.98 5.56 15.47 1.33 2.59 15.23 7.60 14.83 20.90 4.55 11.33 12.81
SGBM & WJBF
2.42 3.09 9.83 0.46 0.97 5.02 6.33 13.41 17.53 3.89 10.22 11.58
SGBM & Proposed 2.34 2.59 9.42 0.36 0.83 3.73 5.68 12.43 15.42 2.58 8.62 7.68
ELAS 3.99 5.45 18.14 1.84 2.55 20.28 7.99 14.69 22.33 6.85 14.55 17.30
ELAS & WJBF 2.96 3.68 13.33 0.71 1.18 7.82 6.55 13.23 17.60 5.35 12.80 13.90
ELAS & Proposed
2.87 3.54 12.86 0.55 0.81 5.65 6.07 12.48 15.67 4.58 12.04 11.69
DBP 0.88 1.29 4.76 0.13 0.45 1.87 3.53 8.30 9.63 2.90 8.78 7.79
DBP & WJBF 0.88 1.31 4.78 0.15 0.39 2.04 3.57 8.37 9.80 2.97 8.74 8.05
DBP & Proposed
0.83 1.19 4.78 0.10 0.32 1.44 3.56 8.31 9.69 2.87 8.62 7.74
BMl & MF 3.54 4.72 16.96 1.50 2.32 16.12 10.35 15.41 25.96 4.52 9.99 13.16
BMl & BF
3.92 5.29 16.73 1.77 2.63 16.90 10.51 15.42 26.21 4.76 10.24 13.91
BMl & JBF 4.57 5.82 19.37 2.14 2.98 16.64 11.50 17.17 29.37 6.77 12.37 19.59
BMl & MLF
4.25 5.34 18.02 2.73 3.74 26.08 11.45 17.15 29.17 6.54 12.04 18.93
BMl & CSBP 4.79 6.56 17.68 2.42 3.40 21.17 11.31 16.08 28.81 5.49 11.31 15.55
combination of WJBF and the SDCF is called pro-
posed method (in short Proposed). In our experi-
ments, we evaluate accuracy improvement of the pro-
posed filter for various types of depth map. In ad-
dition, we reveal advantage of its computational cost.
Moreover we show an example of refinement of depth
map from Microsoft Kinect.
We use the Middlebury’s data sets (Scharstein and
Szeliski, 2002) are used for our stereo evaluation
in the experiments. Data sets are Tsukuba, Venus,
Teddy and Cones (Fig. 3). The image resolution
and depth search range of each image are Tsukuba
(384 × 288, 16), Venus (434 × 383, 32), Teddy and
Cones (450× 375, 64), respectively.
We evaluate the proposed refinement filter for var-
ious depth inputs. Stereo matching methods for the
input depth maps are block matching (BM), dynamic
programming (DP) (Ohta and Kanade, 1985), semi-
global block matching (SGBM) (Hirschmuller, 2008),
efficient large-scale stereo (ELAS) (Geiger et al.,
2010) and double belief propagation (DBP) (Yang
et al., 2008).
We prepared three patterns of the BM’s depth
map according to the amount of noises. They are
high (BMh), middle (BMm) and low noise depth maps
Table 2: Comparing proposed method with cost volume re-
finement (Teddy).
nonocc all disc
BMh 16.17 24.25 29.89
BMh & CVR 8.15 16.25 20.49
BMh & Proposed 9.20 17.55 20.20
BMl 10.63 15.51 26.43
BMl & CVR 8.98 13.58 21.58
BMl & Proposed 8.90 13.71 21.05
SGBM 7.60 14.83 20.90
SGBM & CVR 5.93 12.93 16.39
SGBM & Proposed 5.68 12.43 15.42
(BMl) (See Figs. 6(a), 6(d), 6(g)). The characteris-
tics of the other depth maps are as follows. The DP,
SGBM and ELAS are computed by stereo method
which has near real-time performance, whose depth
maps are middle accuracy (See Figs. 7(a), 8(a), 9(a)).
The DBP (10(a))) is the most accurate method but it
takes much time (several minutes).
In addition, the effect of the proposed refine-
ment filter is verified by following competitive re-
finement filters. These are the low noise BM’s
depth map with median filter (MF), bilateral filter
(BF) (Tomasi and Manduchi, 1998), joint bilateral
filter (JBF) (Pestschnigg et al., 2004; Eisemann and
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
304
Durand, 2004; Kopf et al., 2007), multilateral filter
(MLF) (Lai et al., 2010) and speedup version of (Yang
et al., 2007) used in constant space belief propagation
(CSBP) (Yang et al., 2010) are used as refinement fil-
ters. Furthermore, we compare our proposed method
with a cost volume refinement method (Yang et al.,
2007). In the cost volume refinement, we use joint bi-
lateral filter for cost slice filtering, and we use inputs
depth maps with BMh, BMl and SGBM.
4.2 Results
The resulting depth maps are shown in Fig. 6 to
Fig. 11 (only Teddy’s results are shown due to the
room of the space at the end of the paper). There
are five parameters at weighted image generation
and two parameters at filtering. The parameters
of proposed method at weighted image generation
are (σ
s
, σ
c
, σ
r
, speckleWindowSize, speckleRange) =
(15.4, 5.1, 1.4, 38, 1), and those at filtering are
(σ
s
, σ
c
) = (15.3, 10.7) using BMh depth map. There
parameters are experimentally determined in all
cases. The results of error rate are shown in Tab. 1.
We use the error rate defined in (Scharstein and
Szeliski, 2002). It is calculated by a percentage of the
error pixel of input depth map. Difference between
the input depth map and the ground truth depth map
in the error pixel has over a threshold value (set to 1
in these experiments). In Tab. 1 and Tab. 2, “nonocc”,
“all” and “disc” locate different region, respectively.
The header row “nonocc” evaluates in non-occluded
regions. The header row “all” evaluates in all regions.
The header row “disc” evaluates in regions near depth
discontinuities.
In Table 1, our proposed method can improve
accuracy in all competitive stereo matching meth-
ods and in any data sets, except for DBP. Especially,
amount of the improvement is bigger when accuracy
of depth maps is low. Such roughly estimated depth
maps contain a lot of region of estimation error and
obscure edges. Thus, the proposed method works
well for these depth maps because of noise reduction
and correcting object boundary ability. But, as for
an accurate depth map, such as DBP, the proposed
method has almost no effect. This is because that
there is no region which is possible to be improved.
Instead, in some cases, the error rate is increasing ac-
cording to generated invalid depth value by mixing
some depth values.
Moreover, Table 1 shows that the effect of using
only WJBF and using the proposed method (WJBF
+ SDCF). The effect of the WJBF becomes higher
when the accuracy of input depth map is low. This
is because that the WJBF removes the whole noise,
BM
+Filter
SGBM
ELAS
Image size (n x n) [pixel]
6000
5000
4000
3000
2000
1000
0
Time [ms]
128 384 640 896 1152 1408 1664 1920
BM
(a) Y axis is until 6000 ms
BM
+Filter
SGBM
ELAS
Time [ms]
Image size (n x n) [pixel]
128 384 640 896 1152 1408 1664 1920
0
100
200
300
400
BM
(b) Y axis is until 400ms
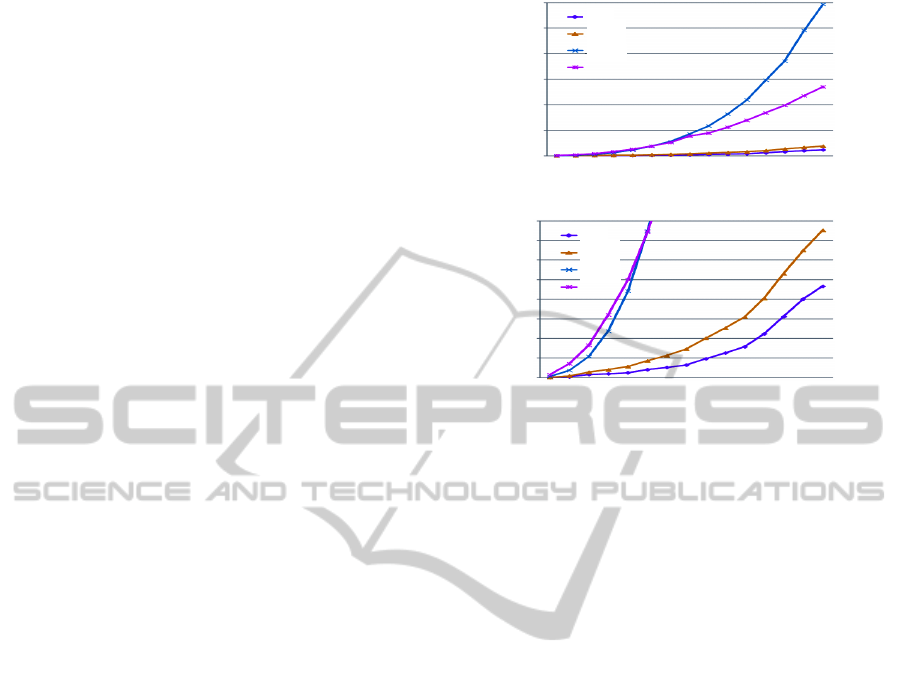
Figure 4: Computational time of each method.
but the SDCF compensate only blurred edge. Thus,
these methods differ in the effect range greatly.
In addition, our proposed refinement filter has the
best performance among all competitive refinement
filters (cost volume refinement is discussed later).
This is because that the MF and the BF can reduce
noise, but, cannot correct object edges. The JBF and
the MLF can reduce noise and correct object edges,
but cannot correct all blur on edges according to mix-
ing some depth values. On the other hands, proposed
method can reduce noise, correct object edges and
control edge blurring.
Here, the effect of the proposed method is consid-
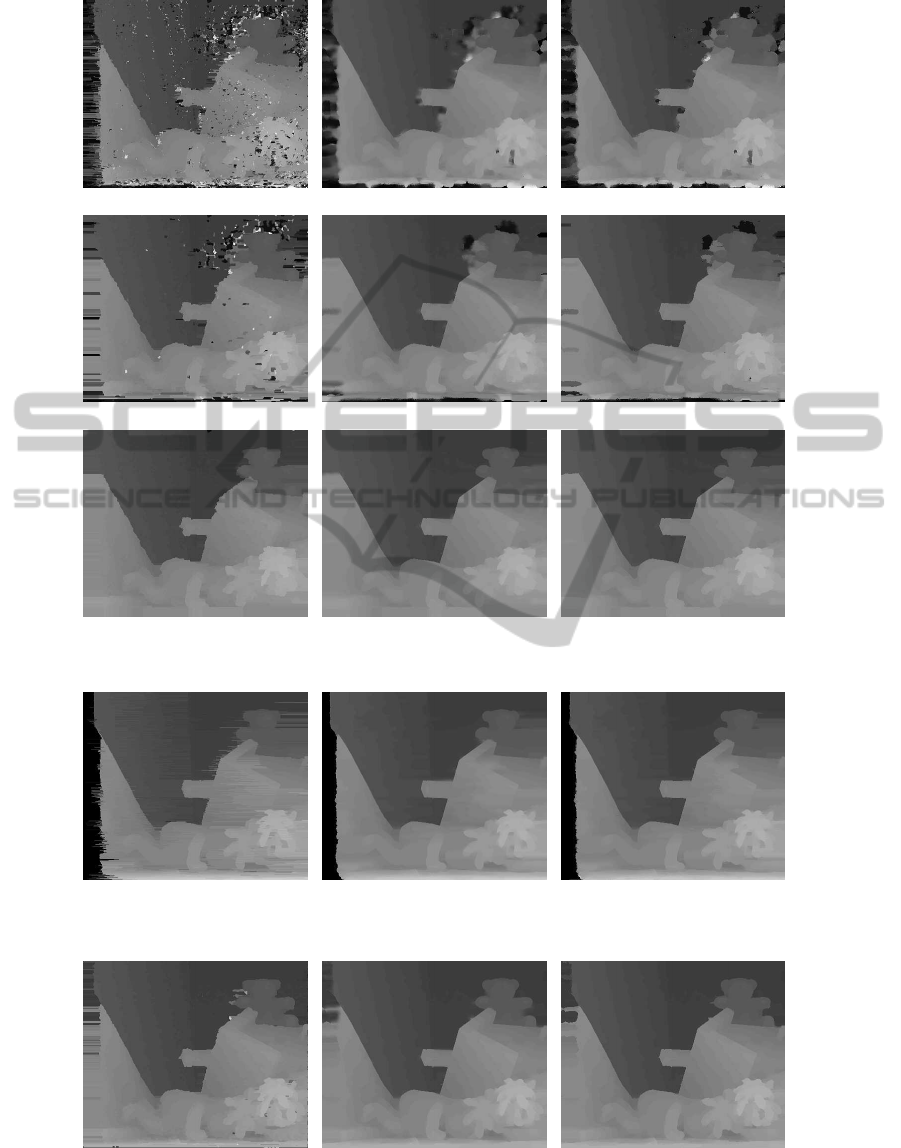
ered from Fig. 6 to Fig. 10. In Fig. 6, depth maps
of (a), (d) and (g) is input depth map with BM. Each
depth map is low accuracy which has many noise and
incorrect object edges. Depth maps of (b), (e) and (h)
are refined by WJBF. These depth maps are reduced
noise and corrected object edges through the WJBF.
But, blur edges occur in object boundary. Whereat us-
ing SDCF, the blur of boundary edges is compensated
in depth maps of (c), (f) and (i). The same effect is
shown by Fig. 7 to Fig. 9. In Fig. 7(a), the effect of
noise reduction is shown. A noise of estimation error
using the DP is reduced by the WJBF. Also, the effect
of edge correction is shown in Fig. 8 and Fig. 9. An
irregularity of boundary edges is corrected by SDCF.
On the other hands, the effect of our proposed method
is not shown in Fig. 10(a). A depth map of (a) using
DBP has almost no noise and correct edges. Thus, our
proposed method hardly makes an effect.
Here, we consider our proposed method and the
WeightedJointBilateralFilterwithSlopeDepthCompensationFilterforDepthMapRefinement
305
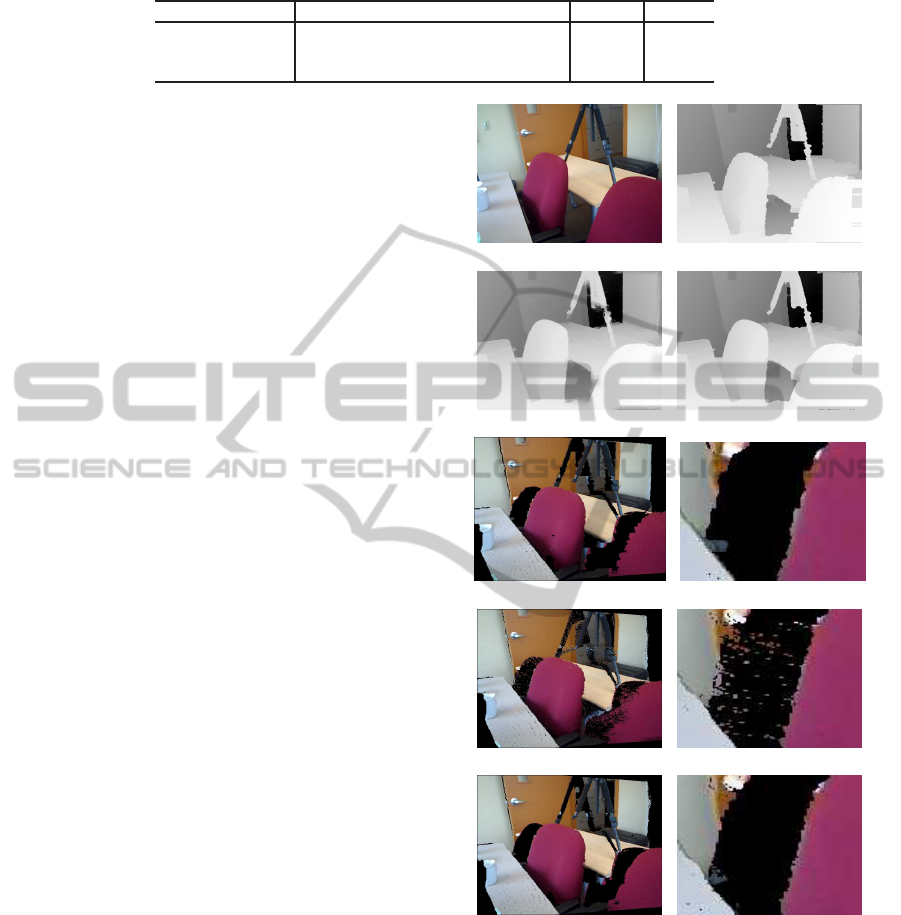
Table 3: Comparing running time (ms) of BM plus proposed filter with selected stereo methods. Kernel size is 7× 7.
Data Set BM Proposed BM+Proposed SGBM ELAS
tsukuba 5.7 4.1 9.8 28.8 61.1
venus 8.4 6.1 14.5 45.9 110.0
teddy and cones 10.5 7.4 17.9 71.4 168.2
cost volume refinement method (CVR). Table 2 and
Fig. 12 show performance of CVR. The input depth
maps are BMh, BMl and SGBM and we use Teddy
data set (Other data sets have the almost same ten-
dency). Comparing the CVR with the proposed
method with each depth map inputs, the performance
of the proposed method is the same or better than
CVR with BMl and SGBM. In the highest noise case,
CVR has the better performance than the proposed
filter. Thus CVR has strong noise reduction perfor-
mance but reduce some detail.
The notable factor of CVR is computational cost.
The cost volume is calculated by stacking the cost
slice of the each depth value which is difference be-
tween an input depth and each depth values, and,
filters every stack. Thus, this method is expensive.
For example, 64 times bilateral filtering is required in
Teddy case, and about 32 times slower than the pro-
posed method. Our proposed method has real-time
capability. Therefore, if the accuracy of an acquired
depth maps is comparable, our proposed method is
more effective than CVR.
Table 3 and Fig. 4 show the result of the running
time with Intel Core i7-920 2.93GHz. Here, compet-
itive methods are SGBM and ELAS which are near
real-time methods in optimized methods. The BM
with the proposed method is faster than the SGBM
and the ELAS for any data set. In addition, refinement
filters depend only on the image resolution, while op-
timization processes (e.g. SGBM) depend also on the
depth search range; thus the gap of the running time
between the proposed method and optimized method
like the SGBM more increase as the image resolu-
tion and the search range become larger. Recently,
image and display resolution are rapidly improved,
thus the proposed method is favorable. Figure 4
shows computational time of various size of simu-
late image data. The lowest size of the input image
is 128 × 128 and its search range is 8. The input im-
ages are generated by multiplying the minimum size
image, such as (256 × 256, 16), (384 × 384, 24), ...,
(1920×1920, 120). The results show that BM is quite
faster than the SGBM and ELAS, and the computa-
tional cost of the proposed refinement filter is quite
low.
We can also use the proposed filter for depth maps
from Microsoft Kinect. Figure 5 shows experimental
results of a depth map from Kinect depth sensor, and
(a) Kinect image (b) Kinect’s depth
(c) JBF refined (b) (d) Prop. refined (b)
(e) rendering using (b) (f) zoomed image (e)
(g) rendering using (c) (h) zoomed image (g)
(i) rendering using (d) (j) zoomed image (i)
Figure 5: Results of refined depth map and warped view
from Kinect depth map.
the sequence is uploaded by (Lai et al., 2011). In this
experiment, we refine the depth map from the Kinect
depth sensor and synthesis a free viewpoint image.
The free viewpoint image synthesis is performed
by the depth image based rendering (Mori et al.,
2009). The non-filtered depth map of getting the
Kinect has rough edges (Fig. 5(b)). Thus, the edge
of a composite image which uses non filtered depth
map is defectiveness (See the chair region of Fig. 5(e,
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
306
(a) BMh (b) BMh & WJBF (c) BMh & Proposed
(d) BMm (e) BMm & WJBF (f) BMm & Proposed
(g) BMl (h) BMl & WJBF (i) BMl & Proposed
Figure 6: Results: block matching.
(a) DP (b) DP & WJBF (c) DP & Proposed
Figure 7: Results: dynamic programming.
(a) SGBM (b) SGBM & WJBF (c) SGBM & Proposed
Figure 8: Results: semi-global block matching.
WeightedJointBilateralFilterwithSlopeDepthCompensationFilterforDepthMapRefinement
307
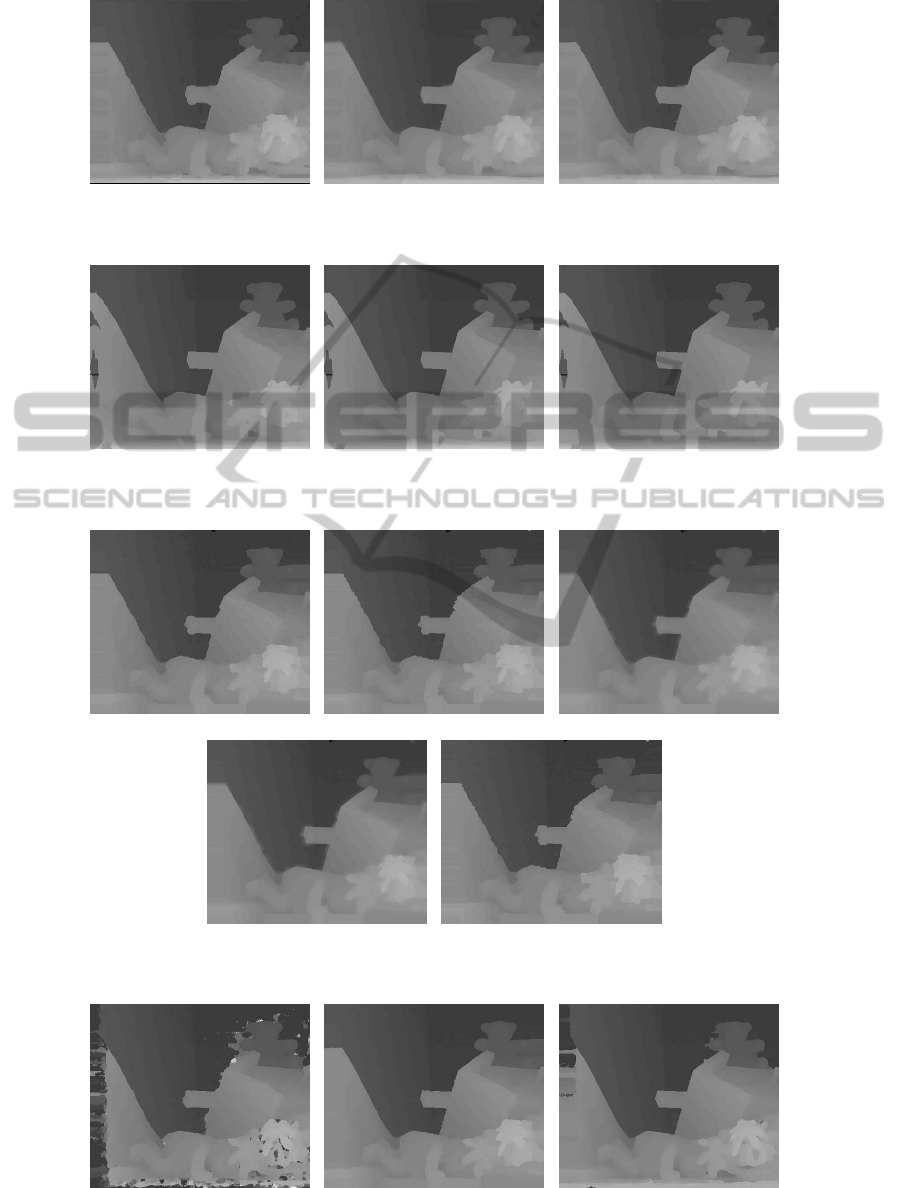
(a) ELAS (b) ELAS & WJBF (c) ELAS & Proposed
Figure 9: Results: efficient large-scale.
(a) DBP (b) DBP & WJBF (c) DBP & Proposed
Figure 10: Results: double belief propagation.
(a) MF (b) BF (c) JBF
(d) MLF (e) CSBP
Figure 11: Results: competitive refinement filters.
(a) BMh & CVR (b) BMl & CVR (c) SGBM & CVR
Figure 12: Results: cost volume refinement.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
308

f)). The depth filtered by joint bilateral filter has
blurs around the boundary (Fig. 5(c)), the render-
ing images are scattered around the object boundary
(Fig. 5(g, h)). In contrast, the depth map filtered by
the proposed filter has corrected edges and no blurs
(Fig. 5(d)). As a result, the edge of the composite
image (Fig. 5(i), (j)) is more corrective then the non-
filtered or joint bilateral filtered it.
5 CONCLUSIONS
In this paper, we proposed a refinement filter set for
depth map improvement—called weight joint bilat-
eral filter and slope depth compensation filter. The
proposed method can reduce depth noise and correct
object boundary edge without boundary blurring, and
it has real-time performance. Experimental results
showed that our proposed filter can improve accuracy
of depth maps from various stereo matching methods,
and has the best performance among the compara-
tive refinement filters. Especially, amount of improve-
ment is large when an input depth map is not accurate.
In such case, computational time of a stereo matching
method is low. Exception case is using fairly opti-
mized depth map, such as double belief propagation.
However the method takes a lot of time. In addi-
tion, its computational speed is faster than the fastest
Markov random field optimization algorithm of semi-
global block matching. Moreover, the filter can apply
the depth map from Kinect, and then the quality of the
synthesized image is up.
In our future work, we will investigate dependen-
cies of input natural images and depth maps, and ver-
ify the proposed filter’s parameters.
ACKNOWLEDGEMENTS
The authors thank Prof. Shinji Sugawara for valu-
able discussions. This work was partly supported
by the Grand-In-Aid for Young Scientists (B) of
Japan Society for the Promotion of Science under
Grant 22700174, and SCOPE (Strategic Information
and Communications R&D Promotion Programme)
122106001 of the Ministry of Internal Affairs and
Communications of Japan.
REFERENCES
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast approxi-
mate energy minimization via graph cuts. IEEE Trans.
PAMI, 23(11):1222–1239.
Eisemann, E. and Durand, F. (2004). Flash photography
enhancement via intrinsic relighting. ACM Trans. on
Graphics, 23(3):673–678.
Fukushima, N., Fujii, T., Ishibashi, Y., Yendo, T., and Tan-
imoto, M. (2010). Real-time free viewpoint image
rendering by using fast multi-pass dynamic program-
ming. In 3DTV-Conference: The True Vision-Capture,
Transmission and Display of 3D Video (3DTV-CON),
pages 1–4.
Fukushima, N. and Ishibashi, Y. (2011). Client driven sys-
tem of depth image based rendering. ECTI Trans. CIT,
5(2):15–23.
Geiger, A., Roser, M., and Urtasun, R. (2010). Efficient
large-scale stereo matching. In Asian Conference of
Computer Vision, volume 6492, pages 25–38.
Hirschmuller, H. (2008). Stereo processing by semiglobal
matching and mutual information. IEEE Trans. PAMI,
30(2):328 –341.
Kopf, J., Lischinski, M. F. C. D., and Uyttendaele, M.
(2007). Joint bilateral upsampling. ACM Trans. on
Graphics, 26(3):96.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-scale
hierarchical multi-view rgb-d object dataset. In IEEE
International Conference on Robotics and Automation
(ICRA), pages 1817–1824.
Lai, P. L., Tian, D., and Lopez, P. (2010). Depth map pro-
cessing with iterative joint multilateral filtering. In
Picture Coding Symposium, pages 9–12.
Mori, Y., Fukushima, N., Yendo, T., Fujii, T., and Tanimoto,
M. (2009). View generation 3d warping using depth
information for ftv. Signal Processing: Image Com-
munication, 24(1–2):65–72.
Ohta, Y. and Kanade, T. (1985). Stereo by intra - and inter-
scanline search using dynamic programming. IEEE
Trans. PAMI, 7(2):139–154.
Pestschnigg, G., Szeliski, R., Agrawala, M., Cohen, M.,
Hoppe, H., and Toyama, K. (2004). Digital photogra-
phy with flash and no-flash image pairs. ACM Trans.
on Graphics, 23(3):664–672.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of depth two-frame stereo correspondence
algorithms. International Journal of Computer Vision,
47(1):7–42.
Sun, J., Zheng, N. N., and Shum, H. Y. (2003). Stereo
matching using belief propagation. IEEE Trans.
PAMI, 25(7):787–800.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color image. In International Conference of
Computer Vision, pages 839–846.
Wildeboer, M. O., Fukushima, N., Yendo, T., Tehrani, M. P.,
Fujii, T., and Tanimoto, M. (2010). A semi-automatic
multi-view depth estimation method. In Proceedings
of SPIE Visual Communications and Image Process-
ing 2010, volume 7744.
Yang, Q., Wang, L., and Ahuja, N. (2010). A constant-
space belief propagation algorithm for stereo match-
ing. In Computer Vision and Pattern Recognition,
pages 1458–1465.
Yang, Q., Wang, L., Yang, R., Stewenius, H., and Nister,
D. (2008). Stereo matching with color-weighted cor-
relation, hierarchial belief propagation and occlusion
handling. IEEE Trans. PAMI.
Yang, Q., Yang, R., Davis, J., and Nister, D. (2007). Spatial-
depth super resolution for range images. In Computer
Vision and Pattern Recognition, pages 1–8.
WeightedJointBilateralFilterwithSlopeDepthCompensationFilterforDepthMapRefinement
309
