
Real-time Appearance-based Person Re-identification
Over Multiple Kinect
TM
Cameras
Riccardo Satta, Federico Pala, Giorgio Fumera and Fabio Roli
Department of Electrical and Electronic Engineering, University of Cagliari, Cagliari, Italy
Keywords:
Video Surveillance, Person Re-identification, Kinect.
Abstract:
Person re-identification consists of recognizing a person over different cameras, using appearance cues. We
investigate the deployment of real-world re-identification systems, by developing and testing a working pro-
totype. We focus on two practical issues: computational complexity, and reliability of segmentation and
tracking. The former is addressed by using a recently proposed fast re-identification method, the latter by
using Kinect cameras. To our knowledge, this is the first example of a fully-functional re-identification system
based on Kinect in the literature. We finally point out possible improvements and future research directions.
1 INTRODUCTION
Person re-identification is the task of recognizing a
person over different cameras, using cues related to
clothing appearance (Doretto et al., 2011). In this pa-
per we focus on two issues related to the deployment
of re-identification systems in real-world application
scenarios: (i) Computational complexity must be low
enough to satisfy real-time requirements; (ii) The ac-
curacy of pedestrian detection, tracking and segmen-
tation (first stage of the pipeline) is critical: in par-
ticular, accurate segmentation is needed to avoid in-
cluding background elements. Computational com-
plexity has been overlooked so far in the literature.
Among the few exceptions, we mention our previ-
ous work (Satta et al., 2012). To improve segmen-
tation accuracy, depth maps provided by range cam-
eras could be exploited (e.g., Time-Of-Flight (Kolb
et al., 2009) or code structured light cameras (Salvi
et al., 2004)). They could also improve tracking pre-
cision, attaining robustness to occlusions and illumi-
nation changes, which are difficult to deal with using
RGB information only.
We investigated the above issues by developing
a fully-functional prototype of a real-time, multiple
cameras re-identification system. We exploited the
fast re-identification method of (Satta et al., 2012),
and the off-the-shelf, low-cost Kinect
TM
range cam-
era, described in Sect. 2. In particular, we used the
Kinect free software libraries, that enable enhanced
tracking, segmentation and pose estimation, using
depth data. We describe the prototype architecture
and implementation in Sect. 3, and its evaluation, on
a data set we collected in our Lab, in Sect. 4.
2 BACKGROUND
2.1 Fast Person Re-identification
Most existing re-identification methods subdivide the
image I of an individual into M ≥ 1 parts {I
1
, . . . , I
M
}
(e.g., torso and legs), and represent each part I
m
as a
bag (set) of local feature vectors (components) {i
k
m
}
(e.g. patches, SIFT points). The Multiple Component
Dissimilarity (MCD) framework (Satta et al., 2012)
drastically reduces the matching time of such meth-
ods, exploiting the fact that the above representation is
likely to exhibit redundancies across individuals that
share similar clothing characteristics. MCD turns the
above kind of appearance descriptor into a dissimilar-
ity one, consisting of a vector of dissimilarities be-
tween each body part I
m
and a set of representative
bag of components for that part, called prototypes.
Prototypes are constructed from a given gallery of
images of N individuals, I = {I
1
, . . . , I
N
}. For each
body part m = 1, . . . , M: 1) The feature vectors {i
k
m
}
of each I ∈ I are merged into a set X
m
=
S
N
j=1
I
j,m
.
2) X
m
is clustered, and the resulting N
m
clusters P
m
=
{P
m,1
, . . . , P
m,N
m
} are defined as the prototypes for the
m-th body part. This procedure returns M sets of pro-
totypes P = {P
1
, . . . , P
M
}.
Given the original descriptor of an individual, I =
407
Satta R., Pala F., Fumera G. and Roli F..
Real-time Appearance-based Person Re-identification Over Multiple KinectTM Cameras.
DOI: 10.5220/0004292504070410
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 407-410
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
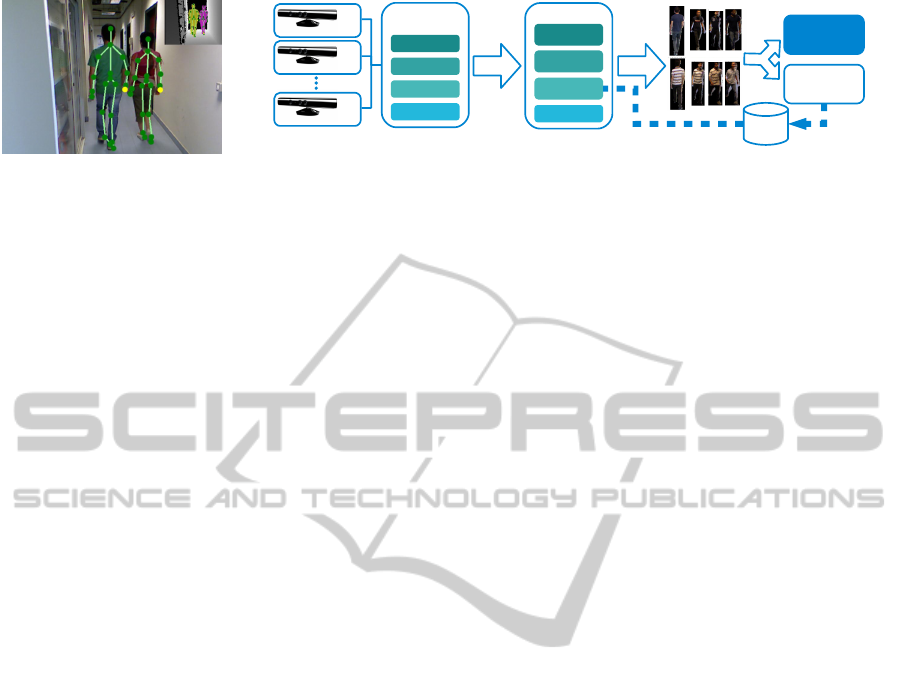
tracking
segmentation
skeletonisation
Microsoft
Kinect SDK
detection
acquired
tracks
camera network
Re-ID module
matching with
templates
ranking
body part
subdivision
descriptor
computation
Kinect
Kinect
ID 4
ID 0
ID 15
ID 7 ID 16 ID 2
(a) (b) (c) (d)
GUI
presentation
add new tracks
to the
Template DB
Template
DB
templates
ranking
Kinect
Figure 1: Left: example of the capabilities of the Kinect SDK. Two individuals are tracked, and their skeleton is super-
impressed on the image. The upper-right box shows segmentation in depth domain. Right: system architecture (see text).
{I
1
, . . . , I
M
}, the corresponding MCD descriptor is ob-
tained as the concatenation of the M dissimilarity vec-
tors I
D
= [I
D
1
, . . . , I
D
M
], where:
I
D
m
=
d(I
m
, P
m,1
), . . . , d(I
m
, P
m,N
m
)
, m = 1, . . . , M ,
and d(·, ·) is a dissimilarity measure between two
sets of components, e.g., the k-th Hausdorff Distance
(Satta et al., 2012). To match two dissimilarity vec-
tors I
D
1
and I
D
2
, a weighted Euclidean distance is used:
higher weights are assigned to most significant proto-
types (see (Satta et al., 2012) for further details).
A specific implementation of MCD (MCDimpl)
was proposed in (Satta et al., 2012). It subdivides
body into torso and legs (M = 2), and uses as com-
ponents patches randomly extracted from each body
part, described by their HSV colour histogram. Pro-
totypes are constructed using a two-stage clustering
algorithm, and are then defined as the patch near-
est to the centroid of each cluster. In (Satta et al.,
2012) it was shown that MCDimpl can allow several
thousands matchings per second, since they reduce
to comparing two real vectors. Moreover, although
prototype construction can be time-consuming, pro-
totypes can be obtained off-line from any gallery of
individuals that exhibits a reasonable variety of cloth-
ings. In particular, such gallery can be different from
the template gallery of the system, and thus does not
need to be updated, as new templates are added during
operation.
2.2 The Kinect Device
The Kinect platform was originally proposed for the
home entertainment market. Due to its low cost, it
is currently gaining much interest over the computer
vision community. The device provides: (i) an RGB
camera (1280 × 960 pixels at 30fps); (ii) an IR depth
sensor based on code structured light, which con-
structs a 640 × 480 pixels depth map at 30fps, with
an effective range of 0.7 to 6 meters. The Kinect
SDK also provides reliable tracking, segmentation
and skeletonisation (Shotton et al., 2011), based on
depth and RGB data (see Fig. 1-left).
The technology adopted by the Kinect device suf-
fers from two limitations. First, the maximum dis-
tance at which a person can be detected (around 5–6
mt) is relatively low. However, ad hoc sensors (proba-
bly more costly) can be developed to deal with higher
distances, based on the same technology. Second, the
use of IR projectors and sensors to build the depth
map prevents outdoor usage, because of the interfer-
ence in the IR band caused by the sun light. In-
door environments include nevertheless typical video-
surveillance scenarios (e.g., offices, airports).
3 SYSTEM IMPLEMENTATION
Our prototype tracks all the individuals seen by a net-
work of Kinect cameras, adds to a template data base
an appearance descriptor (template) of each acquired
track, and re-identifies online each new individual, by
matching its descriptor with all current templates. Af-
ter a track is acquired, the operator is shown the list
of templates, ranked according to the matching score
to that track.
Our prototype architecture is shown in Fig. 1
(right). It consists of a network of Kinect cameras,
connected to a PC (Fig. 1, right (a)). First, detection,
tracking, segmentation (i.e., silhouette extraction) and
skeletonisation of each individual seen by the network
are carried out (Fig. 1, right (b)), exploiting the Kinect
SDK (other detection techniques based on RGB and
range data can also be used, e.g., (Salas and Tomasi,
2011; Spinello and Arras, 2011)). Each individual
is associated to a track, i.e., the sequence of regions
of the RGB frames containing him/her, extracted by
the detector, and the corresponding skeletons. After
a track T is acquired, a template is created by the re-
identification module (Fig. 1-right(c)), and is added to
the Template DB. A template is made up of the acqui-
sition date and time, and of the 5 frames {T
1
, . . . , T
5
}
of the track exhibiting the largest silhouette area, with
the corresponding MCDimpl descriptors.
Online re-identification is performed for each new
track T , with respect to all current templates. The
first frame of T is initially matched to the templates,
and then subsequent frames sampled every t
acquire
= 1
sec., but only if the corresponding silhouette area
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
408

Figure 2: Screenshot of the main view of the prototype GUI, showing images coming from one camera. The user can run
many of these views to check simultaneously different cameras. Left: RGB output (top) and segmentation (bottom). Right:
the best frame (i.e., the one with the largest silhouette area), the matching score and the template ID of the three template
tracks most similar to the one on the left (top); the current template tracks (bottom).
is greater than the one of the previously processed
frame. For a given frame f to be matched: (1) the
silhouette is subdivided into torso and legs; (2) an ap-
pearance descriptor q is created; (3) q is matched to
all current templates. If a frame contains up to two
individuals, the Kinect SDK provides their skeleton,
made up of 20 different joint points. In this case, in
step (1) the torso is obtained by taking all pixels be-
tween the hip center, and of the middle point between
the head point and the shoulder center. Similarly, the
legs body part is obtained from the pixels between the
hip center, and of the lowest foot. If the skeleton is not
available, the body is subdivided using the method of
(Farenzena et al., 2010).
Steps (2) and (3) rely on MCDimpl (see Sect. 2.1).
In our system the prototype gallery was built off-line,
using the 1.264 pedestrian images of the VIPeR data
set (Gray et al., 2007), which exhibit a wide variety of
clothing appearances. The matching score between q
and a template track T was computed as the median
score between q and the MCDimpl descriptors of the
best frames {T
1
, . . . , T
5
}.
For each new track, the sorted list of templates
(Fig. 1(d)) is shown to the operator through a Graph-
ical User Interface (Fig. 2), where one representative
frame for each template is displayed. By clicking on
it, the other frames are also displayed.
4 EVALUATION
We evaluated our system in a real scenario: a small
network of two Kinect cameras, A and B, deployed
in an office building (see Fig. 4, left). The software
was installed on a PC with a dual-core i5 2.3GHz
CPU. We first collected a data set of videos of 54 peo-
ple wearing different clothing. Two video sequences
were acquired for each individual: frontal (camera A)
and back pose (camera B). This is a challenging data
set, due to strongly different poses and non-uniform
illumination (see Fig. 4, middle). It is available upon
request. The experiments were carried out by in-
jecting the video sequences into the system, simulat-
ing their online acquisition. The video sequences of
camera A were used to populate the Template DB:
in this step, re-identification was disabled. Then, re-
identification was performed for each video-sequence
of camera B, without subsequently adding them to the
Template DB. The above experiment was repeated by
switching the roles of cameras A and B.
Re-identification accuracy was assessed via the
Cumulative Matching Characteristic (CMC) curve,
i.e., the probability of finding the true identity among
the first n templates, as a function of n, averaged
over the two runs (Fig. 4, right). Note that the re-
ported performance takes into account all processing
steps, from tracking to matching, while most previous
works focus only on descriptor creation from silhou-
ette, and matching. Computing one descriptor from a
frame (including all preprocessing steps) took about
t
descr
= 50 ms. Matching one probe with one template
track took about t
match
= 0.03 ms.
The maximum number I of individuals that can
be tracked and re-identified simultaneously is approx-
imately I =
t
acq
t
proc
, where t
proc
is the processing time
required to re-identify one frame. It is given by
t
proc
= t
descr
+ M · t
match
, where M is the number of
tracks in the Template DB. In Fig. 3 we plotted I vs
Real-timeAppearance-basedPersonRe-identificationOverMultipleKinectTMCameras
409

A
B
(a) (b) (c)
1 5 10 15 20 25 30 35 40 45 50 55 60
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
recognition rate
rank
CMC
Figure 4: Left: position of cameras A and B. Middle: examples of front and back views from our data set: (a) the same
individual wearing different clothing and cumbersome accessories; (b) different people wearing clothing of the same colour,
and (c) clothing with strong differences between front and back view. Right: average CMC curve attained by our prototype.
M using t
acq
= 1 sec. (see Sect. 3), it can be noted that
M influences I only slightly, due to the very low t
match
of MCDimpl. In real scenarios, M depends on the
number of individuals seen by the camera network in
the period of time of interest (e.g., one day). In small
indoor scenarios (e.g., office buildings), a reasonable
value of M is 400-500. The actual number of distinct
individuals may be much smaller, but it is likely that
each one would be seen many times by the camera
network. In this case, around 15 different individu-
als can be re-identified simultaneously by our system.
Even in larger environments (M ≥ 1000) the value of
I decreases only slightly. It is worth noting that a se-
curity operator is usually interested in re-identifying
only one or a few individuals at a time. Thus, the per-
formance of the proposed system should already sat-
isfy such needs, in small/medium indoor scenarios.
5 CONCLUSIONS
We described the implementation of an online re-
identification system working with multiple Kinect
cameras, which addresses the challenging issues of
computational complexity, and of tracking and seg-
mentation. To this aim, we used the fast re-
identification method of (Satta et al., 2012), which
enables on-line re-identification over a camera net-
work, and carried out tracking and segmentation ex-
ploiting the depth map provided by the Kinect de-
vice, although its technology limits its application to
0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500
0
5
10
15
20
25
I
M
Maximum number of individuals re−identified simultaneously
Figure 3: Maximum number I of individuals seen by the
camera network that can be re-identified simultaneously,
versus the number M of template tracks.
indoor environments. Two main improvements can
be foreseen. First, temporal reasoning on the spa-
tial layout of the camera network can be exploited,
to avoid matching the current track with templates ac-
quired distantly in space or time. Second, a quality
measure should be defined to select the most repre-
sentative frame of a track, for template construction.
We used to this aim the silhouette area, but lighting
conditions and body pose could be considered as well.
ACKNOWLEDGEMENTS
This work has been partly supported by the project
CRP-18293 funded by Regione Autonoma della
Sardegna, L.R. 7/2007, Bando 2009.
REFERENCES
Doretto, G., Sebastian, T., Tu, P., and Rittscher, J. (2011).
Appearance-based person reidentification in camera
networks: problem overview and current approaches.
J. Amb. Intell. and Human. Comp. 2:127–151.
Farenzena, M., et al. (2010). Person re-identification by
symmetry-driven accumulation of local features. In
CVPR, 2010.
Gray, D., Brennan, S., and Tao, H. (2007). Evaluating ap-
pearance models for recognition, reacquisition, and
tracking. In PETS, 2007.
Kolb, A., Barth, E., Koch, R., and Larsen, R. (2009). Time-
of-Flight Sensors in Computer Graphics. In Euro-
graphics 2009 - State of the Art Reports.
Salas, J. and Tomasi, C. (2011). People detection using
color and depth images. In MCPR, 2011.
Salvi, J., et al. (2004). Pattern codification strategies in
structured light systems. Patt. Rec. 37(4):827–849.
Satta, R., Fumera, G., and Roli, F. (2012). Fast person re-
identification based on dissimilarity representations.
Patt. Rec. Lett. 33(14):1838–1848.
Shotton, J., et al. (2011). Real-time human pose recognition
in parts from single depth images. In CVPR, 2011.
Spinello, L. and Arras, K. (2011). People detection in rgb-d
data. In IROS, 2011.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
410
