
A Region Driven and Contextualized Pedestrian Detector
Thierry Chesnais
1
, Thierry Chateau
2
, Nicolas Allezard
1
, Yoann Dhome
1
, Boris Meden
1
,
Mohamed Tamaazousti
1
and Adrien Chan-Hon-Tong
1
1
CEA, LIST, Vision and Content Engineering Laboratory, Point Courrier 94, F-91191 Gif-sur-Yvette, France
2
Institut Pascal, UMR 6602 CNRS, Blaise Pascal University, Campus des Cézeaux, 63170 Aubiere, France
Keywords:
Videosurveillance, Object Detection, Pedestrian Detection, Semi-supervised Learning, Oracle.
Abstract:
This paper tackles the real-time pedestrian detection problem using a stationary calibrated camera. Problems
frequently encountered are: a generic classifier can not be adjusted to each situation and the perspective
deformations of the camera can profoundly change the appearance of a person. To avoid these drawbacks
we contextualized a detector with information coming directly from the scene. Our method comprises three
distinct parts. First an oracle gathers examples from the scene. Then, the scene is split in different regions
and one classifier is trained for each one. Finally each detector are automatically tuned to achieve the best
performances. Designed for making camera network installation procedure easier, our method is completely
automatic and does not need any knowledge about the scene.
1 INTRODUCTION
Recently several applications, like videosurveillance,
have promoted the development of the pedestrian de-
tection algorithms. Classical approaches to detect ob-
jects are based on machine learning. Training a detec-
tor consists in extracting the best discriminative fea-
tures between pedestrian and background from a la-
beled training dataset. Then the detector compares
the selected features of a new image with these of the
database to predict the presence of a pedestrian. But
the appearance of pedestrians varies a lot in terms of
size, angle and posture, depending on the viewpoint
of the camera. These large variations disrupt the de-
tector.
In the case of a videosurveillance system, most
of the characteristics of the scene are known and are
stable for a long time. Taken into account informa-
tion coming from the scene to contextualize a detector
could simplify the pedestrian detection problem.
In this article we focus on a videosurveillance
problem using a calibrated static camera. We demon-
strate that contextualizing and restraining a detector
inside some predefined regions improves local and
global performances of the system. Our automatic
method takes into account the perspective and the
pedestrian density of the scene to build these regions.
This paper is organized as follows. The section 2
introduces some approaches recently proposed to mit-
igate the problems mentioned above: generic classi-
fier and perspective deformations. The sections 3 and
4 present our method to contextualize a detector us-
ing the geometric information of the scene. Finally
evaluations of our approach are given in section 5.
2 RELATED WORK
Different strategies exist to build a detector. Classical
methods consist in computing a global classifier, that
is used to entirely scan an image. This approach is
commonly used in the case of a generic learning algo-
rithm when the context of the classifier is unknown. A
representative dataset is difficult to gather, especially
if the classifier had to work in a broad range of ap-
plications. This kind of classifiers is not very specific
and can fail if the scene characteristics are different
from these encountered during the learning.
Secondly, it is difficult to design a pedestrian de-
tector, because of i) the perspective issues and ii) as
the human body is articulated, it yields a lot of dif-
ferent configurations. Since (Dalal and Triggs, 2005),
there has been a lot of work trying to make the model
learned even more complex to take these deforma-
tions into account. The most successful approach is
probably the Deformable Part Model from (Felzen-
szwalb et al., 2008). Instead of considering a global
and complex classifier to recognize a pedestrian in ev-
796
Chesnais T., Chateau T., Allezard N., Dhome Y., Meden B., Tamaazousti M. and Chan-Hon-Tong A..
A Region Driven and Contextualized Pedestrian Detector.
DOI: 10.5220/0004292607960799
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 796-799
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

ery posture seen from any angle, the complexity is ex-
ternalized and several specific classifiers are used.
Local methods, like (Grabner et al., 2007), exist to
reduce the complexity of the learning problem in the
case of a static camera. Instead of computing a sin-
gle complex detector, a lot of simpler classifiers are
learned. As these methods are extremely local they
could be sensitive to noise in the video or global il-
lumination changes. Moreover some areas are almost
empty, leading to some poorly trained detectors.
Finally some intermediary methods have been
published. (Park et al., 2010) suggest to build two
different classifiers. One for small pedestrians with
a few details and one more complex for these with a
sufficient definition. Mixing both classifiers allows to
improve the global detector performances in case of
scale variations due to the perspective.
In videosurveillance, the camera is static and con-
tinually observes the same place. So, after studying
the scene during a while, it is possible to predict the
majority of the events encountered by the system and
their positions in the image. Taking into account this
information could increase performances.
3 ORACLE
Our goal is to contextualize a pedestrian detector.
Two steps are necessary to achieve it. First we need
to collect some pedestrian examples coming from the
scene in order to train a classifier. This function is
provided by an oracle which automatically annotates
the video and finds useful pedestrian and background
examples. An oracle has a low recall and a high pre-
cision. The oracle uses a combination of elementary
algorithms: a generic pedestrian detector trained on
an independent database and a background subtrac-
tion algorithm.
3.1 Positive Examples
To extract some pedestrian examples, we need to
merge signals provide by these two algorithms. Our
approach is inspired by a previous work of (Rodriguez
et al., 2011). The generic classifier provides a vec-
tor s
c
= (s
i
)
1≤i≤n
containing the classification score
of the n boxes in the image. Each score s
i
is normal-
ized between 0 and 1. The background subtraction
also provides a binary segmentation, I
Bkg
, of the im-
age. The oracle output is a Boolean vector x ∈ {0, 1}
n
.
The i
th
component of x indicates if the i
th
box is a pos-
itive detection.
We are considering the merging step as a mini-
mization of an energy E, formulated in the equation 1:
E = −s
T
c
x + x
T
W x + α||I
Bkg
− I
Model
(x)||
2
(1)
The matrix W avoids that two boxes could both be se-
lected if they are too close. W is a symmetric matrix
n × n with W
i, j
= ∞ if the two boxes i and j are simi-
lar and 0 else. Notice that if we omit the last term in
the equation we could recognize a classical non max-
imum suppression method. This last term controls
the consistency of a detection with the background
subtraction. To obtain the binary model I
Model
(x) we
model detections in x by a full box. The parameter α
adjusts the importance between the classification and
the background subtraction segmentation. In our ex-
periment, α is fixed to 1.
3.2 Negative Examples
The oracle gives a set of pedestrian positions. In order
to train a classifier we still need a set of background
examples. Our strategy consists in choosing random
boxes, non overlapping with positive detections. As
the oracle has a low recall, it does not detect all pedes-
trians. Then some false negative detections will be in-
corporated in the negative base. However this is rather
unlikely because statistically there are more negative
examples in an image than positive ones.
4 REGION DRIVEN
PEDESTRIAN DETECTION
The second step of the contextualization consists in
incorporating some information on the geometry of
the scene. Spatially contextualizing a detector is a
way to limit the influence of the perspective in the
image. The contextualization can be useful during
the detection phase because it can avoid scanning
empty areas (section 4.1). Moreover the contextual-
ization improves the training step (see 4.2). During
this phase, several regions are defined in the scene
and a classifier is trained for each region. Thus a spa-
tially driven classifier is not forced to recognize all
the possible poses of a pedestrian but only a coher-
ent subset. Creating groups with pedestrians sharing
common properties simplifies the training problem.
4.1 Empty Areas
In a scene, we frequently observe some inaccessible
areas like walls. Scanning these regions can only in-
crease the false positive rate and slow down the scan.
To find these empty areas we first segment the im-
age in order to reveal its structure. In this optic, we
ARegionDrivenandContextualizedPedestrianDetector
797
use a superpixel algorithm (Achanta et al., 2012), that
spatially splits, in the color domain, an image into ar-
eas. We only retain areas containing at least one de-
tection (defined by its 3D feet position) provided by
the oracle. The other ones are not scanned during the
detection step.
4.2 Building Regions to Drive a
Detector
Regions ensure a good locality of the examples for
one classifier. This locality allows to learn pedestrians
with similar scale and lean characteristics.
To build the different regions, we still exploit a
superpixels algorithm. We use a k-means algorithm
working in a four parameters space: (x, y, s
p
, s
n
), with
x and y corresponding to a 3D position of a pedestrian
previously detected by the oracle in the ground plane.
s
p
(x, y) is the score given by the generic classifier for
it and s
n
(x, y) is the score of the background element
at the position. We obtain s
n
(x, y) by averaging the
classification scores at this position on the complete
sequence. We use the same assumption as for a back-
ground subtraction algorithm: a pedestrian is seldom
immobile and its influence on the average is low.
5 EVALUATIONS AND
DISCUSSIONS
In this section we compare performances of a generic
detectors with two contextualized detectors: the first
one is trained on data coming from the whole im-
age where as the second one is also spatially driven.
This comparison comprises two parts: the first one
presents the performances by region whereas the sec-
ond one highlights the global performances. All these
comparisons show the competitiveness of our system.
We test our algorithm on a sequence coming from the
European project ITEA2 ViCoMo.
5.1 Results by Region
In this part, we demonstrate the interest of the spa-
tial contextualization. First we use our oracle to de-
tect some pedestrian examples. The figure 2 shows
some examples coming from the contextualized train-
ing dataset. For a given region, pedestrians share
similar appearance characteristics like scale. Errors
are often recurrent. Concerning the negative exam-
ples some stationary pedestrians are not detected. For
the positive examples the oracle is not always able to
correctly center a person, especially when two people
are closed. On the groundtruth sequence, our oracle
reaches a recall of 0.66 and a precision of 0.97.
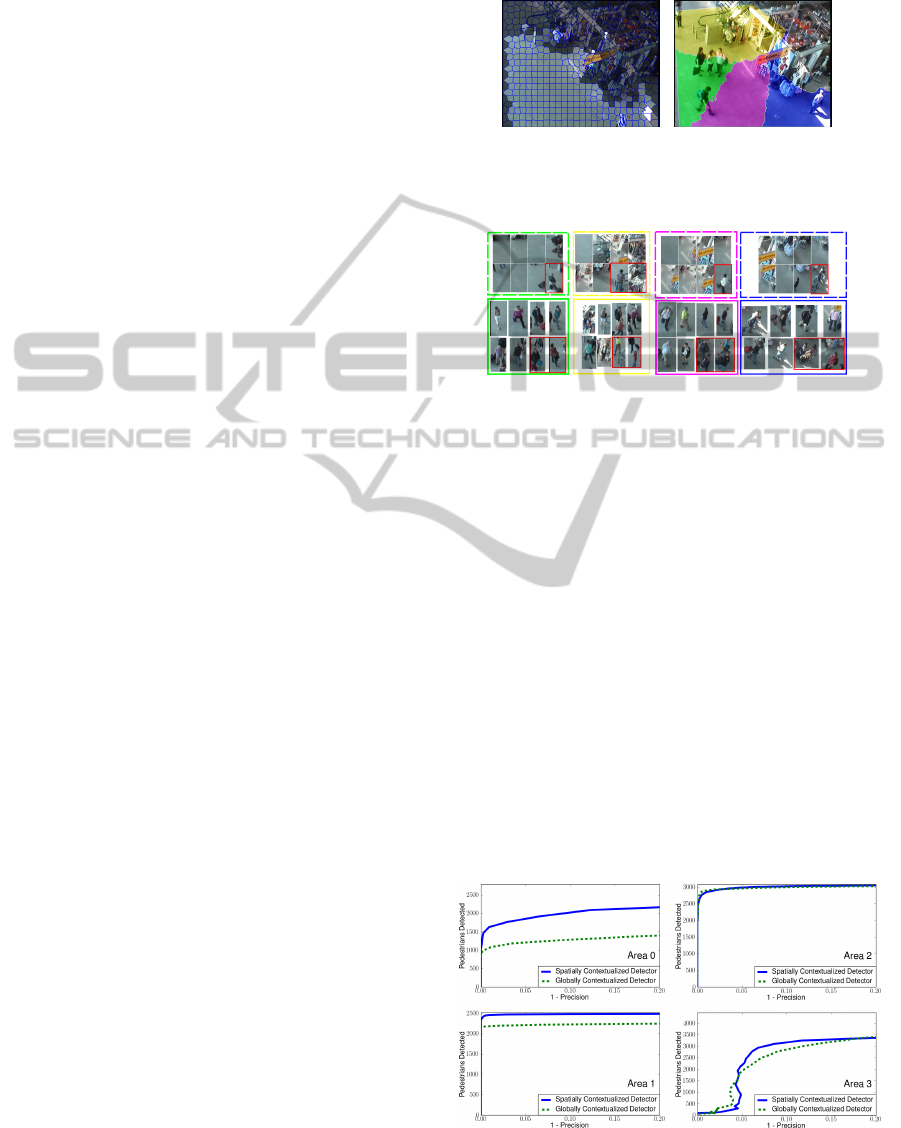
(a) Empty areas (dark) (b) Regions
Figure 1: Empty areas and the four regions built by our
method.
Figure 2: Positive (continuous line) and negative (dotted
line) examples gathered from each region. Examples with
label errors are surrounded by a red box.
Our algorithm defines 4 regions, shown on the
figure 1.b. For each one, a classifier is trained with
some examples coming from the specific region. We
compare their performances with a global classifier,
trained with examples coming from the entire image.
Results are shown on the figure 3.
The region with the higher deformation due to the
perspective has the id 0 and is located at the right
bottom corner. Our contextualized and spatially con-
strained detector (blue curves) performs better than
the global contextualized detector (green curves). In
the other parts of the image, both classifiers achieve
similar performances. This can be explained by the
fact that the perspective has less influence in these
regions. The shape of the curves for the last re-
gion (id 3) is due to the fact that some false positive
detections have a higher score than true positive ones.
Figure 3: Precision-recall curves for each region.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
798
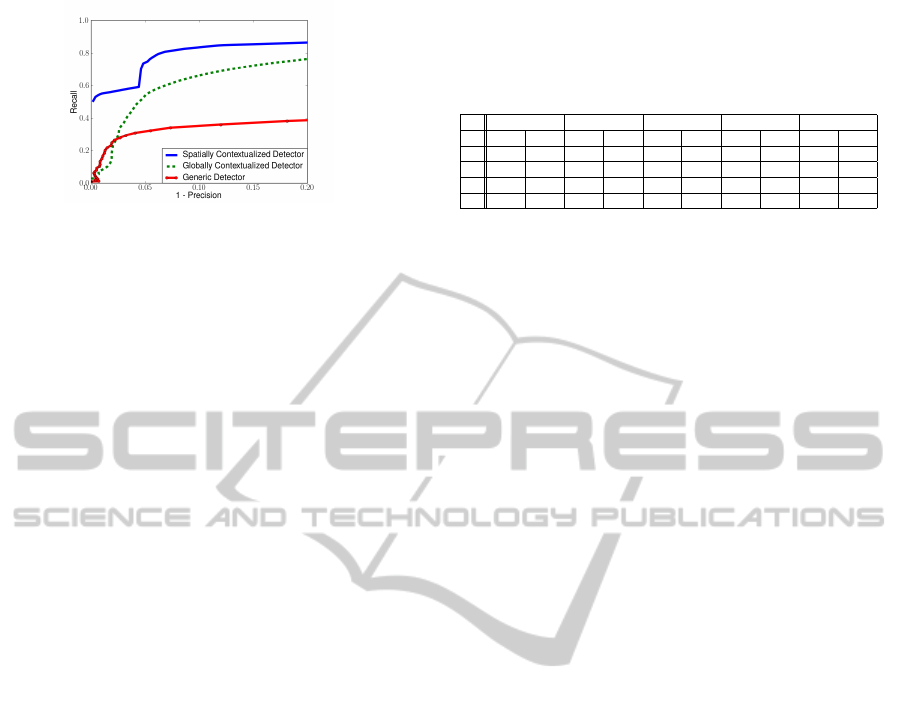
Figure 4: Global precision-recall curves.
5.2 Global Results
In the last paragraph we present the results of our sys-
tem for each region separately. In this section we
are interested in its global performance. We compute
precision-recall curves on the whole image.
Our results are shown on the figure 4. We can
see that both contextualized detectors (blue and green
curves) are better than the generic one (red curve).
As expected, the contextualized and region driven de-
tector performs better than the solely contextualized
detector. On the blue curve, the distortion is easily
explained by the performances of the classifier in the
fourth region (id 3).
All these experiments tend to prove that a global
classifier, even if it is contextualized, is not optimal in
our application. A region driven classifier can achieve
better performances.
5.3 Automatic Detection Threshold
Estimation
Once all classifiers have been trained, we need to tune
them to achieve the best performances. In a video-
surveillance system, as the scene is stable, one false
positive detection is fairly sure to come back in the
following frames. So it is essential to filter out the
false positive detections. This mostly consists in ad-
justing each detection threshold independently.
The optimal threshold is the one maximizing the
best F-measure, which is a trade-off between the pre-
cision and the recall. In the case of a generic learn-
ing algorithm, we simply use an annotated testing
dataset to estimate this threshold. In a contextual-
ized approach, we do not have such a dataset like a
groundtruth. So we reuse the oracle to collect new ex-
amples to create an estimated groundtruth. This time
we replace the generic classifier of the oracle by a
contextualized one. With this estimated groundtruth,
it is possible to compute a recall and a precision for a
given threshold and to deduce the F-measure. A 1-D
maximization is done to find the best threshold.
Table 1: Comparison between the detectors (global and spa-
tial) performances at their optimal thresholds θ
pr
opt
and at
their estimated ones θ
auto
opt
(T: threshold, P: precision, R: re-
call, F: F-measure).
Global Region 0 Region 1 Region 2 Region 3
θ
pr
opt
θ
auto
opt
θ
pr
opt
θ
auto
opt
θ
pr
opt
θ
auto
opt
θ
pr
opt
θ
auto
opt
θ
pr
opt
θ
auto
opt
T 24.6 21.9 11.5 16.2 1.4 17.9 3.1 32.5 28.3 27.6
P 0.87 0.73 0.88 0.99 0.99 1.0 0.97 1.0 0.88 0.86
R 0.69 0.72 0.75 0.60 0.98 0.89 0.96 0.88 0.73 0.74
F 0.77 0.72 0.81 0.74 0.98 0.94 0.96 0.94 0.80 0.80
To evaluate the accuracy of the estimated thresh-
olds, θ
auto
opt
, we compare them to the optimal thresh-
olds θ
pr
opt
. Results are shown on the table 1. As the
contextualized oracle is not perfect, there are some
mislabeled examples in the estimated groundtruth. So
the estimated thresholds can be slightly different from
the optimal ones. But usually they achieve similar
F-measures.
6 CONCLUSIONS
In this article, we propose a system to automatically
build a contextualized pedestrian detector for video-
surveillance applications. First, an oracle with a high
precision gathers scene specific pedestrian examples.
This dataset and the geometry of the scene are then
used to design 3D regions where pedestrians share
similar appearance characteristics. The idea is to ex-
ternalize the classifier complexity. Finally one detec-
tor, composed by the classifiers trained for each re-
gion and set to their optimal working points, is run.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Süsstrunk, S. (2012). SLIC Superpixels Compared to
State-of-the-art Superpixel Methods. PAMI.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. In CVPR.
Grabner, H., Roth, P. M., and Bischof, H. (2007). Is pedes-
trian detection really a hard task? In PETS.
Park, D., Ramanan, D., and Fowlkes, C. (2010). Multireso-
lution models for object detection. In ECCV.
Rodriguez, M., Sivic, J., Laptev, I., and Audibert, J.-Y.
(2011). Density-aware person detection and tracking
in crowds. In ICCV.
ARegionDrivenandContextualizedPedestrianDetector
799
