
SODA: A Scalability-Oriented Distributed & Anticipative Model for
Collision Detection in Physically-based Simulations
Steve Dodier-Lazaro
1,3
, Quentin Avril
2,3
and Val
´
erie Gouranton
1,3
1
INSA de Rennes, Rennes, France
2
Universit
´
e de Rennes 1, Rennes, France
3
IRISA / INRIA, Rennes, France
Keywords:
Collision Detection, Physically-based Simulation, Distributed Systems, Scalability, Optimistic Computing.
Abstract:
In this paper, we propose a distributed and anticipative model for collision detection and propose a lead for
distributed collision handling, two key components of physically-based simulations of virtual environments.
This model is designed to improve the scalability of interactive deterministic simulations on distributed sys-
tems such as PC clusters. Our main contribution consists of loosening synchronism constraints in the collision
detection and response pipeline to allow the simulation to run in a decentralized, distributed fashion. To do
so, we setup a spatial subdivision grid, and assign a subset of the simulation space to each processor, made of
contiguous cells from this grid. These processors synchronize only with their direct neighbors in the grid, and
only when an object moves from one’s area to another. We rely on the rarity of such synchronizations to allow
anticipative computing that will also work towards improving scalability. When synchronizations occur, we
propose an arrangement of collision checks and rollback algorithms that help reduce the processing cost of
synchronized areas’ bodies. We show potential for distributed load balancing strategies based on the exchange
of grid cells, and explain how anticipative computing may, in cases of short computational peaks, improve
user experience by avoiding frame-rate drop-downs.
1 INTRODUCTION
Virtual reality [VR] researchers and industry users
have growing needs for the physically realistic sim-
ulation of large virtual environments. These include
detecting collision between simulated bodies. Colli-
sion detection [CD] consists of finding if, where and
when several objects may collide in a 3D virtual envi-
ronment (Ericson, 2005). It is a prerequisite of colli-
sion response [CR] that will provide the proper forces
or impulses to be applied on the bodies by means of
Constraint Solving [CS].
Considerable research effort has been put in col-
lision handling in general, and many algorithms and
frameworks exist for sequential and parallel collision
detection and constraint solving. Current parallel col-
lision detection or handling systems are based on the
traversal and update of tree structures (Tang et al.,
2009; Thomaszewski et al., 2008), the use of GPUs
for massively parallel processing (Kim et al., 2009;
Pabst et al., 2010), or fine-grained scheduling strate-
gies (Hermann et al., 2009).
Coupled with powerful computers, these algo-
rithms already allow real-time large-scale simulation
of increasingly complex bodies. Besides, theoretical
grounds exist on the distribution of a virtual environ-
ment simulation (Fujimoto, 1999), and we are now
in a time where PC clusters are affordable for most
research centers and large companies, and are already
used for animation and rendering in VR systems (Raf-
fin and Soares, 2006).
Nevertheless, little work has been done towards
collision handling on distributed systems. Current
research addresses collision detection between bod-
ies in high-latency networks (Chen and Verbrugge,
2010), rather than the fully distributed scheduling of
a collision pipeline. (Morgan and Storey, 2005) dis-
tributed collision handling in the past, but also with
a focus on avatars controlled by multiple users rather
than handling collisions distributedly without dupli-
cates. We argue this would benefit the performance
of applications like distributed simulation of virtual
cities, or massively multiplayer online games with
more persistent and realistic physics.
Contributions. We present SODA, a model for colli-
337
Dodier-Lazaro S., Avril Q. and Gouranton V..
SODA: A Scalability-Oriented Distributed & Anticipative Model for Collision Detection in Physically-based Simulations.
DOI: 10.5220/0004293803370346
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 337-346
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

sion detection on distributed systems with anticipative
computation. SODA aims for interactive physically-
based simulation on PC clusters. We propose loosely-
synchronized and anticipative simulation by dividing
space into areas called worlds. Each world is se-
quentially simulated on a stand-alone core (or multi-
core node). We allow anticipative computation (i.e.
simulating steps ahead of the current clock of other
worlds) when no data dependency prevents it. We
outline methods for synchronizing collision detection
and constraint solving when a dependency exists, and
we propose rollback algorithms that reduce the cost of
synchronizing a simulation step between worlds when
that step had been anticipatively computed. Finally,
we explain how anticipation can help improve user
experience by avoiding sharp decreases of frame-rate
when computationally expensive collisions occur.
Organization. In Section 2, we review some paral-
lel and distributed CD and particle simulation algo-
rithms, and explain our positioning. In Section 3, we
describe our distributed and anticipative virtual envi-
ronment simulation model. Section 4 presents ob-
servations made on a case study of collision detec-
tion. They may guide implementation choices for spa-
tial subdivision granularity and distributed CS design.
They also outline the benefits of anticipation. Finally,
we conclude and propose leads for future research in
Section 5.
2 RELATED WORK
In this section, we present state-of-the-art CPU-based
parallel collision handling systems. We do not investi-
gate GPUs, used as massively parallel side processors
in both CD and CS, as they are not relevant to our in-
tent in SODA: assessing the feasibility of distributed
rather than centralized parallel collision detection.
We also outline the difference between existing
distributed CD methods and SODA, and introduce
distributed particle simulation algorithms. Finally, we
enumate the assumptions our model is based on.
2.1 Parallel Collision Handling
Parallel and distributed systems are nowadays targets
of choice for virtual reality applications with signifi-
cant computing needs, and there is flourishing litera-
ture on parallel collision handling. Yet, no distributed
approach has been proposed for consistent, determin-
istic CD. Many researchers have instead sought to
take better advantage of particular architectures such
as combinations of CPUs and GPUs (Hermann et al.,
2010; Kim et al., 2009; Pabst et al., 2010). The pa-
pers we present focus on lowering synchronization
and load balancing costs in a multi-CPU context, and
are the closest in philosophy with SODA.
(Hermann et al., 2009) explored the construction
of a task dependency graph for the collision handling
pipeline based on previous collisions, which allowed
them to schedule tasks among available processors
and eliminated the need for synchronization between
each pipeline stage. The graph is replayed among
several time frames to limit the overhead of load bal-
ancing. They reached close to optimal scalability for
particle simulation, but not for simulations containing
heterogeneous complex objects.
(Tang et al., 2009) proposed incremental parallel
BVTT traversal, measuring the workload per BVTT
branch to distribute the load between processors in
collision detection. They decompose BVTT traversal
as a pipeline mostly made of parallel steps, albeit with
synchronization between each stage. They achieved
a speedup up to 6 fold on an eight core CPU, after
which performance stopped increasing linearly. Be-
sides, tree-based spatial subdivisions need to be regu-
larly updated, which is difficult in a distributed way.
Finally, (Kim et al., 2008) reached 7.3 speedup
on 8 CPUs over a single core, with their PCCD al-
gorithm which is based on dynamic task decomposi-
tion and assignment. They reach such scalability by
getting rid of as many data dependencies and synchro-
nizations as possible in their pipeline. They presented
the best scalability in the CD literature. For compari-
son, Hermann et al.’s physics simulation pipeline has
a slightly lower scalability when simulating heteroge-
neous rigid bodies on sixteen cores.
2.2 Distributed Collision Detection
Typical peer-to-peer applications include multiplayer
games, featuring a virtual environment in which
avatars may collide. These avatars are controlled on
different computers, which need to exchange infor-
mation in order to process collisions and keep the
state of the environment consistent. Deterministic CD
is not realistic in this high-latency network context
because packets may be lost or take hundreds of mil-
liseconds to reach all hosts.
Various strategies emerged for CD with remote
bodies, usually variants of Dead Reckoning [DR]
which predicts the motion of remote avatars until
they update their real position (Fujimoto, 1999). For
instance, Motion-Lock (Chen and Verbrugge, 2010)
predicts collisions and starts agreement with remote
hosts before the collisions occur, rather than once re-
mote hosts communicated updated body positions.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
338

In SODA however, it is the simulation that is dis-
tributed on several cores and not the sources of user
interaction. We are interested in precise, determinis-
tic CD. SODA could be used for complex physically-
realistic virtual city simulations with one or several
agents. In contrast, previous work focuses on virtual
worlds where each node can process all physics con-
straints on its own.
2.3 Distributed Particle Simulation
Particle simulation researchers have common re-
search questions with the collision detection commu-
nity: they need to detect and process collisions be-
tween thousands of objects in a simulated environ-
ment. However, particles are typically represented as
points or spheres, rather than thousands-of-polygons
bodies. This allows the use of much simpler CD algo-
rithms, and significantly simpler load balancing met-
rics. Therefore, particle simulation systems are usu-
ally run on clusters aggregating hundreds of cores.
(Li et al., 2007) proposed an event-driven parti-
cle collision system with a priority queue of events to
be processed for each particle. Speculative compu-
tations are performed on particles waiting for a prior
event to be processed. These speculative computa-
tions are kept if the states of particles they are per-
formed on have not been affected by prior events in
the queue. They also proposed a dynamic adjustment
of the amount of speculative computation to perform
depending on how many of these are invalidated, in
order to save storage and computation costs.
(Miller and Luding, 2004) proposed a spatial sub-
division based on a uniform grid, where each CPU
manages an area of contiguous, square-shaped cells
to best exploit spatial coherence. They add border
traversal events to their system to know when syn-
chronization between two areas is necessary. Finally,
they perform dynamic load balancing by splitting an
overloaded area, merging two underloaded areas, and
assigning one of the splitted sub-areas to the orphan
core.
2.4 Work Hypotheses
Scalability is limited in a parallel computing system
by the lack of task decomposition that prevents from
using all available nodes, or by recurrent synchroniza-
tions. The former problem may be solved by decom-
positing tasks further, and scheduling them according
to their dependencies. This has been largely done in
CD and CR.
The latter may be managed with optimistic com-
puting: if the slowest node’s tasks cannot be split
any further, other nodes will anticipate their work-
load to obtain speed improvements onto next compu-
tation steps. However this will bring benefits only if
the slowest node is not always the same.
We argue that this condition may be verified in a
range of VR applications (e.g. those with constantly
moving bodies such as factory automated assembly
lines, or virtual cities with moving crowds). A dis-
tributed (inherently anticipative) system may improve
performance for such applications.
Asanovic et al. (Asanovic et al., 2006) advise re-
searchers to design systems that scale well on any
number of cores. In practice, simulations imply tem-
poral coherence and hence synchronization at some
point, which means they cannot scale infinitely. Like-
wise, benefits from optimistic computing are theoret-
ically bounded (Miller and Luding, 2004), on top of
additional memory cost (Fujimoto, 1999).
Knowing this, improving the performance of some
tasks of the collision handling pipeline (such as us-
ing GPUs to dramatically improve CD or CS) will
bring benefits, but pushing further scalability limits of
the global pipeline by removing unnecessary synchro-
nizations may bring other, complementary benefits.
3 THE SODA MODEL
In this section, we describe how space is distributed
and synchronization occurs in SODA. We also present
our approaches to I/O management, and a sketch of
distributed load balancing algorithm.
We propose to loosen synchronization constraints
between the main components of collision handling
pipelines, by dividing the simulation space and allow-
ing the computation of different simulation steps in
either of these areas. In contrast, current frameworks
never start a simulation step’s CD before CS and time
integration have been entirely performed for the pre-
vious step.
In SODA, each node processes a subset (referred
to as a world) of the simulation space, defined by ad-
jacent cells in a spatial subdivision uniform 3D grid
(named territory). Each world communicates exclu-
sively with those managing areas adjacent to his own
(called neighbors, and the planes between distinct ar-
eas are called borders).
Worlds synchronize with neighbors when a body
overlap the border between their territories. Only
the CS stage on the simulation island of the border-
crossing body needs to be performed concurrently by
worlds. However, they also exchange data during CD
to identify common simulation islands.
Each world saves the results of simulation steps
SODA:AScalability-OrientedDistributed&AnticipativeModelforCollisionDetectioninPhysically-basedSimulations
339
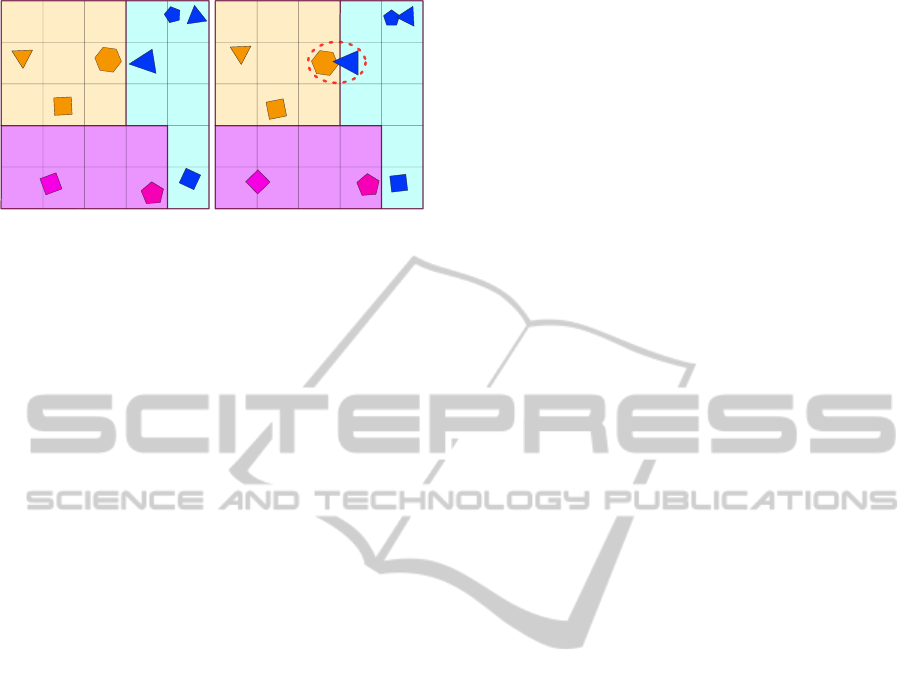
Figure 1: A 2D simulation with three worlds. On the right,
a border traversal forces the top worlds to synchronize.
into a buffer. A process then reads entries correspond-
ing to the slowest world’s clock, to allow output to
users. User input can be managed by modifying the
world containing bodies with which the user interacts.
Rollback algorithms can be used to integrate user ac-
tions in the world’s buffer entries.
In this paper, we do not investigate issues linked
to user interaction or to predictability of body motion
which may impact offline computation of data struc-
tures or scheduling strategies. In SODA, initial terri-
tories are modified with time by load balancing.
3.1 Territories and Borders
3.1.1 Territory Definition
We define spatial subdivision in the form of a uniform
3D grid, which has the following advantages in a dis-
tributed context:
• cells can be described with just coordinates and
a world identifier, allozing compact exchange of
cell data between worlds
• storing the topology of the subdivision is very
cost-efficient (no need to store shapes)
• unlike tree-like subdivisions, they do not require
to update their shape on body motion (but may
have to on body deformation)
Worlds manage a territory made of adjacent grid
cells so as to best exploit temporal coherence (Lin and
Gottschalk, 1998). Hence, bodies switching between
cells will most often remain in the same world. This
avoids creating data dependencies between worlds
when a body moves from one to another.
Another advantage of this territory definition is
that worlds need to hold in memory just the grid of
their territory and direct surroundings (to keep track
of which cells belong to which neighbors).
The problem of optimal cell size is well-known
and does not have an ideal solution (Le Grand, 2007).
The size of grid cells depends in SODA upon a sin-
gle criterion: cells should be strictly larger than the
biggest simulated body in order to ensure that colli-
sions only occur between bodies from adjacent cells.
The use of hierarchical grids is left for further re-
search, to support bodies with heterogeneous dimen-
sions or deformable shapes.
3.1.2 Border Traversal Detection
Collisions may occur between bodies from different
worlds, as illustrated in Figure 1. If they are left un-
managed, then some contact responses will not be ap-
plied and the simulation will no longer be determinis-
tic. To allow anticipation within a world, we need to
be able to detect which bodies overlap a border.
To do so, borders between two territories are rep-
resented by static physics bodies and SODA’s detec-
tion collision algorithm is used to discover border
traversals, although no collision response is applied
with border bodies. The synchronization mechanism
is explained in Section 3.2.2.
Cost of the Detection. Assuming territories are made
of a single cell, every body will have to be tested for
collision with the 6 borders of its containing cell. In
the worst case, all bodies will be next to their cell’s
corner and collide with 3 borders. Hence they may
overlap with up to 7 distinct worlds, which brings up
to 9 more borders with which they may be colliding.
The sum of additional collision checks to perform, fif-
teen per body, remains of linear complexity.
In practice, territories are larger and fewer cells
contain borders. Besides, overlapping tests with
an axis-aligned plane are often faster than collision
checks between two complex bodies, further limiting
the cost of border detection.
3.2 Autonomous Worlds
3.2.1 Worlds and Transform Buffers
Worlds in SODA are physics engines that run sequen-
tially on a node. They are responsible for detecting
and processing collisions in a subset of the simula-
tion space. Each engine uses its own local clock and
performs simulation steps independently from others.
The results of a simulation step are made available to
others as a time-stamped list of transforms (i.e. mo-
tions, rotations and velocities of bodies) for each body
simulated in the world’s territory. The lists are saved
to a circular buffer, which can be read to retrieve the
positions of bodies at each step.
The use of a circular transform buffer offers a
trade-off between the desired robustness of the ap-
plication and the memory size needed to store the
buffers. A large buffer enables the precomputation of
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
340
World j
t
i+1
t
i
t
i+2
t
i+3
t
i -1
t
j
t
j -1
t
j+1
t
j+2
t
j -2
t
K+2
t
K+1
t
K+3
t
K+4
t
K
World k
Transform Buffer Interface: queries all worlds
for object transforms at the slowest world's time
World i
3D Engine
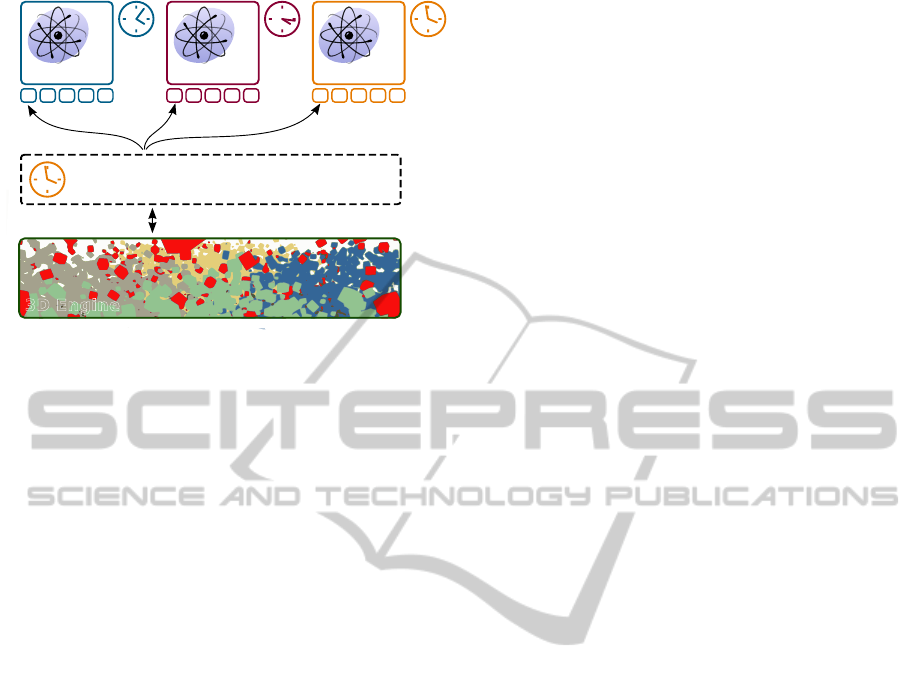
Figure 2: Global architecture of SODA. Worlds i, j and k’s
buffers are read by the interface, which is used by the 3D
engine’s process to update positions.
several seconds of simulations, which can help absorb
the performance impact of a computational peak due
to many simultaneous collisions. Yet, the size of the
buffer must be bounded depending on the amount of
memory available on the system where SODA runs.
Besides, the more important the anticipation is, the
more likely it is to be invalidated by further synchro-
nizations, up to a point where anticipation becomes
pointless (Miller and Luding, 2004).
A buffer interface is in charge of reading and
deleting buffer entries, at the same timestamp for all
worlds. It updates body representations within a 3D
engine, to allow output to users, and also to make sure
no entry within a buffer is deleted before all worlds
have simulated the corresponding timestamp (since it
may be modified by unexpected synchronization).
3.2.2 Synchronization with Neighbors
Determinism is guaranteed in traditional parallel col-
lision handling frameworks by not performing antic-
ipation: all constraints from a simulation step are
solved before the next step starts. Instead, we want
to guarantee it by taking into account data dependen-
cies between worlds at different times.
Consequently, any body that overlaps a border be-
tween two worlds will cause these worlds to synchro-
nize their physics pipeline. When two worlds are
synchronized, they will exchange information about
border-crossing bodies, and make sure to take into ac-
count collisions between foreign border-crossing bod-
ies and their own ones. Simulation islands are then
computed from collision information.
If a body overlaps a border and exists in two is-
lands on different worlds, the islands will be merged
before computing a response in parallel. Otherwise,
islands that exist within a single world (a fortiori
those that don’t contain bodies on border cell) are
solved locally on a world’s node.
Algorithm 1 presents our new collision handling
pipeline. First, CD is performed between local bod-
ies, then with the world’s borders. In case of synchro-
nization (border traversal or external query), worlds
will exchange their lists of crossing bodies, and de-
tect collisions between these new bodies and theirs.
Simulation islands can then be computed and
merged with foreign ones when they contain a for-
eign body. The local ones may be solved locally and
the mixed ones in parallel between involved worlds.
Nothing prevents from starting local CS before
foreign collisions are detected. Synchronization mes-
sages can be read asynchronously by their recipient,
and a world ahead of another one for any stage of the
pipeline could use the rollback algorithms presented
after to avoid processor idling caused by synchroniza-
tion.
3.2.3 Modifying Anticipated Entries
A direct consequence of synchronization between two
worlds w
1
and w
2
is that the world that is ahead of the
other has to modify some of its anticipated compu-
tations: they were performed ignoring a data depen-
dency from the slower world and some collisions need
to be integrated.
In order to limit the incurred losses, we propose
a CD rollback based on the spatial subdivision grid
used for territories. We integrate changes caused by
the synchronization into previously computed buffer
entries, using algorithm 2: Rollback and Propagate.
The worst use case of SODA, performance wise,
is a simulation where all bodies are constantly inter-
connected. This will force constant synchronization
between all worlds and prohibit anticipation. We yet
have to evaluate the overhead caused by the use of
SODA in such a setup, but SODA is likely to be out-
performed by finer-grained parallel solutions for this
kind of simulations. We expect to be able to improve
performance in the future by finding other ways of
performing anticipative computations.
The rollback algorithm will improve performance
over direct invalidation of a full entry whenever not a
territory contains several simulation islands. Indeed,
we already use a spatial subdivision broad-phase to
allow cheap border traversal detection. The cost of
this broad-phase lies in the actual overlap tests be-
tween bodies and not in the browsing of the subdivi-
sion cells. Hence, the rollback algorithm will not be
significantly costlier than a broad-phase with ordered
cell browsing, and will be more efficient as soon as
some bodies are not in a chain of contacts with the
SODA:AScalability-OrientedDistributed&AnticipativeModelforCollisionDetectioninPhysically-basedSimulations
341

Input: TimeStamp t
Variables:
List of ContactInfo borderCols;
List of Worlds nbh;
boolean syncNeeded = ⊥
Code:
localCD();
borderCols = onBorderCD();
if borderCols not empty then
nbh =
findAndNotifyNeighbors(borderCols);
syncNeeded = >;
end
if syncQueue contains entry for t then
borderCols = borderCols ∪
syncQueue.getBorderCols(t);
nbh = nbh ∪ syncQueue.getWorlds(t);
syncNeeded = >;
end
if syncNeeded then
waitForNeighbors(nbh, t);
foreach World n ∈ nbh do
exchangeBorderCollisions(n,
borderCols, t);
end
foreach ContactInfo info ∈ borderCols do
singleBodyCD(info.getBody());
end
calculateSimulationIslands();
mergeIslandsWithBorderCols(nbh, t);
parallelSolveMergedIslands(nbh, t);
concurrently with
solveLocalConstraints();
else
calculateSimulationIslands();
solveLocalConstraints();
end
Algorithm 1: Collision handling pipeline with synchroniza-
tion on border traversal.
ones that cross a border. Figure 3 shows a fictive ex-
ample of rollback applied to a buffer entry. Only the
bodies in the darker cells will have their transforms re-
computed, and because they do not collide with bod-
ies from surrounding cells, the rest of the entry will
be preserved.
Rollback may also be developed for CS, by saving
result matrices of commonly used iterative solvers,
and by later modifying them by adding extra con-
straints. Because the matrix will be close to conver-
gence for almost all values (except for the non-null
lines and rows of the new constraints), it may con-
verge with less iterations than from starting over. This
technique is already used to decompose systems and
solve them in parallel on GPUs (Tonge et al., 2012).
However, it provides benefits only from direct
Input: Stack of Bodies L, TimeStamp t
Variables:
List of Bodies temp, colliding;
CircularTransformBufferEntry newEntry;
Body bd;
if LocalClock() ≥ t then
Code:
m Buffer.rollbackAt(t);
while t < LocalClock() do
while L not empty do
bd = L.pop();
temp = rebuildIsland(o);
colliding = {temp} ∩ colliding;
end
rollbackSolveConstraints(colliding);
foreach Body bd ∈ colliding do
newEntry.insert(o.getTransform());
end
m Buffer.overwrite(t, newEntry);
L = colliding;
colliding = {};
t = t+1;
end
end
Algorithm 2: Our rollback algorithm, presented with-
out synchronization mechanisms for easier understand-
ing. rollbackAt() prevents from reading the buffer
starting at t, and overwrite() overrides the entry and
makes it readable again. rebuildIsland() performs
CD body per body until no more collisions are found.
rollbackSolveConstraints() reuses a previous matrix
if possible to accelerate CS.
rollback of the first step where synchronization oc-
cured. Typically, many values will be (slightly) af-
fected in the new result matrix, making it impossible
to directly modify next step’s matrix in the same way.
It is left to future research to determine how to reuse
result matrices from previous simulation steps.
Differences with Dead Reckoning. DR answers a
need in high-latency environments, that SODA is un-
able to deal with. Still, it is worth noticing that the
CS part of the pipeline benefits from our border de-
tection, in case of mistake during anticipated compu-
tations. Figure 4 shows that SODA will never detect
false collisions when a foreign body’s motion is not
known for a given simulation step. Instead, it will ig-
nore the (potential) foreign body until the rollback al-
gorithm is called. This means that no false constraint
has been injected in the constraint equation system (as
would happen with estimations of remote body po-
sition), and this is primordial to allowing the reuse
of past computed matrices. In SODA, false positives
may only occur indirectly, when a rollback removes a
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
342
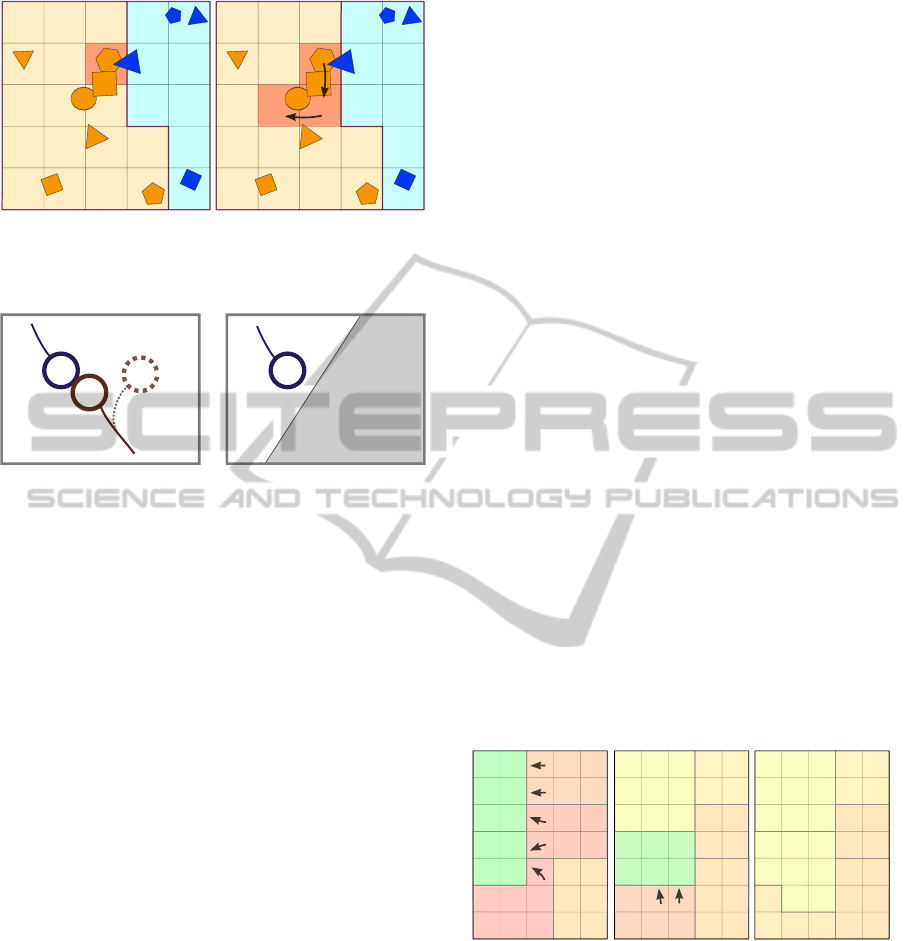
Figure 3: Example of rollback on the left world, caused
by a synchronization. Only bodies in the border-traversing
body’s simulation island will be modified.
L L
Dead Reckoning SODA Anticipation
F
F
real
estimate
ignored until
border collision
Figure 4: DR-like strategies may detect false positive that
will prevent CS rollback, whereas SODA will avoid them.
border traversal that also caused a collision.
3.3 Input/Output and Simulation Setup
3.3.1 Rendering
Interactive applications need real-time rendering, re-
gardless of simulation progress. In SODA, a 3D en-
gine stores its own clock and 3D representation of
bodies, and updates them before each rendering pass
with a buffer interface (as illustrated by Figure 2).
This interface is queried with the clock value of
the step to render, and then asks all worlds if they
have a buffer entry for this value. If not, the inter-
face uses the lowest clock value available among all
worlds. Then, it actually queries entries and updates
the 3D engine’s body information accordingly. It also
returns the engine the clock value that was used, so
that rendering occurs in real time when worlds cope
with the workload, and in slow motion otherwise.
The cost of reading transforms is linear in num-
ber of bodies and no worlds are created or removed
during the simulation. On large clusters where buffer
reading may not scale, it is thus possible to distribute
the querying and reading of entries onto several cores
that will concurrently access the 3D engine’s internal
memory. They can negotiate the clock value to use
and the worlds each one of them should monitor.
3.3.2 User Input
Users may interact with an application by adding, re-
moving, or modifying the behavior of a body. Either
way, the modifications that occurred will cause the in-
validation of anticipated simulation steps in a world.
The rollback algorithm can be used to manage these
changes. The overhead of integrating user interac-
tions in anticipated computations cannot be avoided
but is lesser than that of full invalidation.
3.4 Load Balancing
To validate our model, we must be able to balance
load between nodes in a distributed fashion as well.
In this section we just show that there are ways of de-
signing distributed load balancing for SODA. For in-
stance, this may be performed between two worlds by
asking for and by giving parts of their territory. When
a cell is transferred from a world to another, its bodies
are then simulated by the recipient world, increasing
the runtime of its collision handling pipeline, and re-
ducing the load of the sender world. A rough sketch of
the load balancing process is illustrated by Figure 5.
There are several challenges to address for effi-
cient load balancing: using lightweight, accurate and
distributed load estimation metrics; choosing which
grid cells should be given, and to which neighbors;
keeping territories shaped as spheres or cubes to pre-
serve benefits from temporal coherence (Miller and
Luding, 2004); performing loose load balancing to
limit its cost and rely more on anticipation.
p
i
39%
p
j
54%
p
k
64%
p
h
82%
p
l
73%
p
m
73%
p
i
24%
p
j
32%
p
k
81%
p
h
92%
p
l
89%
p
m
73%
p
i
54%
pj
54%
pk
64%
p
h
69%
p
l
73%
p
m
73%
Figure 5: Example of two underloaded worlds, p
i
and p
j
,
being given territory by their overloaded neighbors (per-
centages represent load estimations).
3.4.1 Load Metrics
Simple metrics, such as the average time to perform
one pass of collision handling, can be combined with
the advance of a world over its neighbors, which in-
dicates how much it can afford to handle collisions
more slowly. We could also use the density of the
territory, as it represents the risk that a computational
peak occurs. The problem of computing an average
SODA:AScalability-OrientedDistributed&AnticipativeModelforCollisionDetectioninPhysically-basedSimulations
343
load, or of estimating one’s load, in a distributed con-
text can be expressed as a consensus problem and is
widely studied. A summary of current challenges and
advances can be found in the PhD thesis of (Cosenza,
2010), with examples in ray-tracing and simulation.
3.4.2 Example of Load Balancing Algorithm
Every world may compute, using the metrics, a global
load estimation, as well as an estimation for each of
its cells. It may then ask its neighbors for their own
last load estimation. If the world is significantly more
loaded, it will compute a load score to reach, repre-
senting its overload compared to neighbors. Then, it
will search among its neighbors which are most likely
to benefit from receiving additional territory (e.g. de-
pending on their own load, territory size, number of
neighbors) and rank them by load score to give. It
will then choose among its cells which are the most
interesting for that neighbor and distribute them until
it reached the load score previously set, switching to a
new neighbor if necessary. As in (Miller and Luding,
2004), the algorithm should make sure to keep terri-
tories in one piece and to minimize their perimeters.
4 CASE STUDY
In this section, we present statistics from simulations
performed on our ongoing implementation. We ob-
serve the behavior of synchronizations in our imple-
mentation to choose the most suitable granularity of
space distribution among worlds. We also illustrate
the interest of anticipation in terms of resistance to
frame-rate drop-downs.
The implementation uses open-source software
(the Bullet Physics engine v2.79 and the Ogre 3D
engine v1.7). At the time of writing this paper, dis-
tributed CD was implemented but CS had not yet been
adapted to manage foreign bodies’ constraints within
a world. We did not seek to evaluate raw performance
as our implementation conflicts with many of the op-
timizations present in the engine we used. We focus
only on the feasibility of a distributed physics pipeline
and on reducing the amount of synchronizations to an
acceptable level.
4.1 Distribution of Synchronizations
The following experiment was performed on a sys-
tem with two Intel Xeon X5680 processors, for a total
of 12 CPUs. The system has 48GB RAM, and runs
Linux 3.2. We wrote a parallel shared-memory im-
plementation, each world running in a thread of the
100
1000
500
0
12
Rigid bodies
Worlds per
group size
1
5-8
2-4
9-11
12
Figure 6: Evolution of the number of worlds per sizes of
synchronization groups, depending on the density of the
simulation.
same process. This choice was made as no PC cluster
with more cores was available.
We explored the potential for distribution with our
current definition of territories and borders. To do so,
we ran a simulation with twelve worlds and a growing
number of bodies (hence a growing density), homo-
geneously and randomly distributed in the space. The
space was 24000 km
3
, and the simulated bodies were
cubes of 100 cm
3
. We ran each simulation five times
for ten seconds (at 60 FPS) and aggregated results for
each time steps.
Although it may seem a school case for traditional
CD algorithms, the homogeneity of the positioning
means that it is impossible for worlds to map their
territories to “collision hot spots”. Because there are
very few worlds for such a large space, borders be-
tween worlds are very large and inevitably overlapped
by at least one cube.
Figure 6 shows worlds classified by the size of
their synchronization group, on average. It is obvi-
ous that such a coarse granularity has no chance of
bringing performance improvements over parallel ap-
proaches: it would need to scale for thousands of bod-
ies rather than a few hundreds.
We classified groups for better readability, de-
pending on what kind of scalability groups of their
size would obtain with state-of-the-art algorithms
from the CD litterature. For instance, groups below
four worlds would obtain full scalability while those
above eight would start being limited. The idea is to
visualize the groups that have a critical size and that
will decrease the overall scalability of the simulation.
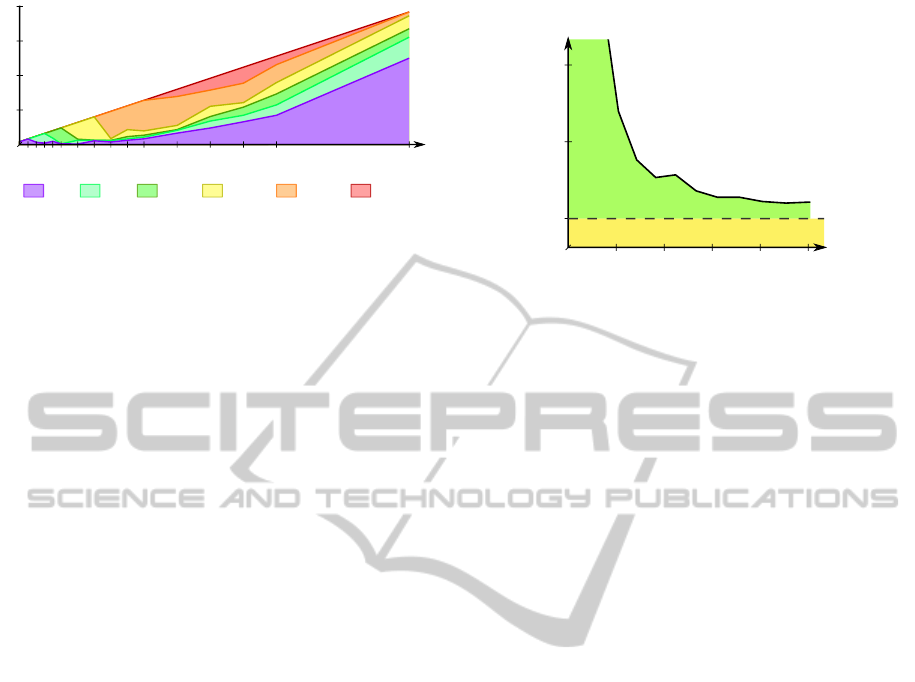
Our second experiment seeked to evaluate the im-
provements we would obtain from using more worlds.
We ran on the same system a similar simulation with
five hundred bodies (where the previous simulation
was almost fully synchronized), and a varying number
of worlds. As Figure 7 suggests, synchronizations be-
come rarer with as few as five to ten bodies per world.
From this perspective, we recommand that dis-
tributed collision handling be run on many-core ar-
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
344
2
96
64
0
96
Worlds
Worlds per
group size
564812 20 32 40
9-12
4-8
13-20
21-36
37+
1-4
Figure 7: Evolution of the number of worlds in each
connected-group size class, depending on the number of
cores.
chitectures with very fine-grained distribution of the
space. Miller and Luding used such a small granu-
larity while Li et al. chose to simulate bodies directly
rather than territories regrouping few bodies. Besides,
there are incentives for chosing simulation islands as
a unit of task decomposition, for the CS stage of the
collision handling pipeline.
Current parallel CD algorithms make use of
GPUs, which are a form of many-core architecture,
but we argue that current state of GPGPU languages
is limiting potential for anticipation and asynchronous
computing because it allows the use of GPUs only as
passive devices which need a CPU to send data and
launch kernels. However, we may see the emergence
of new classes of distributed algorithms, similar or not
to SODA, when GPGPU languages and frameworks
start offering more flexibility.
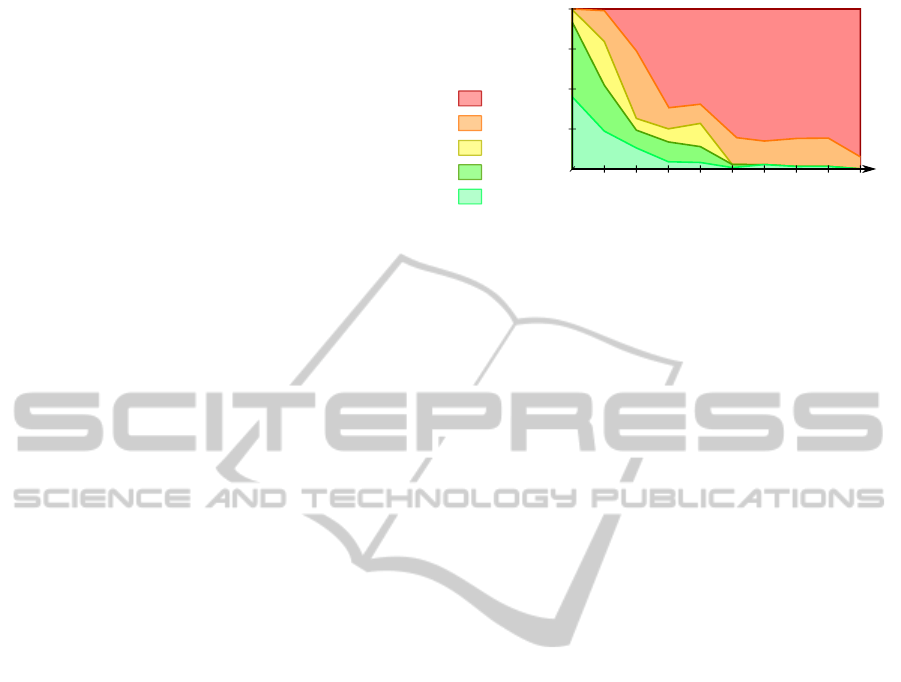
4.2 Anticipation Benefits
We evaluate the benefits of anticipations in SODA
with a function taking two parameters: a percentage
of overload for a process, and the size of a buffer in
which anticipated entries are stored. It should inform
on the number of simulation steps that can be com-
puted and used (including those in the buffer) before
a process will start being too late to cope with the ren-
dering frame rate.
In implementations, such a function could be used
to evaluate the cost-efficiency of anticipation (com-
paring the size requirement of a buffer and its ability
to provide resilience to frame-rate drop-downs), or the
emergency of load balancing for discrete CD systems.
Indeed, load balancing can be delayed when the addi-
tional workload is limited and does not represent a
high risk of lateness for a given process.
We designed an experimental case study, running
at 60 FPS with a single world running on a Intel Xeon
W3540 CPU (2.93GHz). We simulated 40 cubes per-
fectly overlapping, and put them back to their orig-
inal position after each simulation step, so that they
48
30
144
96
0 30 60 90 120 150
Extra
load
Steps computed
before first delay
Buffer size benefits
Anticipation
benefits
Figure 8: Example of anticipation benefits function for a
world run on a Xeon W3540 with a buffer of 48 anticipated
entries.
would keep overlapping (though we did not reset ac-
celeration). We used a 2-body broad-phase algorithm,
which has exponential complexity. Hence, we eval-
uated increases in work load in terms of number of
checks to perform when adding bodies. This num-
ber of cubes was enough for the collision handling
pipeline of our prototype to fill the transform buffer,
yet adding more cubes would cause the world to miss
the 60 FPS target.
After a warm-up phase of one second to fill
buffers, we added enough cubes to reach a wanted
threshold of additional cost, and calculated the time it
would take for the world not to be able to provide an
entry on due time to the rendering process. Results are
shown in Figure 8 and indicate that there is a clear in-
terest to allow anticipation rather than to simpler cou-
pling of collision handling and rendering. Even with
a 150% load increase, the world had up to a second
(sixty steps) to react and trigger load balancing.
In practice, we expect that load balancing algo-
rithms with direct access to anticipation benefits func-
tions for a variety of buffer sizes would be able to
adapt the aggressiveness and granularity of their load
balancing using the number of anticipated entries they
store in their buffers. In a distributed context where
processors can be added to match the computational
needs of an application, resilience to frame-rate drop-
downs is a desired property that may let processes
perform load balancing only when it is necessary and
focus on useful computation instead.
5 CONCLUSIONS
In this paper, we have presented SODA, the first col-
lision handling model designed for low-latency dis-
tributed systems. SODA is designed for high scal-
ability on systems with tens to hundreds of CPUs,
SODA:AScalability-OrientedDistributed&AnticipativeModelforCollisionDetectioninPhysically-basedSimulations
345

using decentralization and anticipation to reach this
goal. We showed how collision handling can be per-
formed in a distributed way among several processes,
without constant clock synchronization between pro-
cesses. We proposed a novel rollback algorithm to
improve the efficiency of anticipative computation.
We showed that there is potential for load bal-
ancing in SODA. We showed the limitations of our
broad-grained approach, with synchronizations still
too frequent for proper distributed computation with-
out a significant number of concurrent worlds, which
we will have to address by finding finer-grained task
decompositions. Finally, we evaluated in a case study
the expected ability of anticipation to mitigate frame-
rate drop-downs that may harm user experience.
In the future, we intend to develop specific con-
straint solvers for distributed contexts, in order to im-
prove rollback and to solve constraints in parallel with
least communication between two cores. We also
want to integrate the motion of objects into load bal-
ancing decisions, and to use the static environment for
initial territory setup. Finally, we want to explore the
efficiency of SODA for specific applications such as
indoor crowd simulation or complex factory environ-
ment simulations, with predictable flows of motions.
ACKNOWLEDGEMENTS
We address our thanks to Bruno Arnaldi and the
anonymous reviewers for their feedback, Alexan-
dra Covaci for her help in processing experiments
data and Loeiz Glondu for our insightful discussions
on linear constraint solvers. This work was partly
supported by the French Research National Agency
project named Corvette (ANR-10-CONTINT-CORD-
012).
REFERENCES
Asanovic, K., Bodik, R., Catanzaro, B. C., Gebis, J. J.,
Husbands, P., Keutzer, K., Patterson, D. A., Plishker,
W. L., Shalf, J., Williams, S. W., and Yelick, K. A.
(2006). The landscape of parallel computing research:
A view from berkeley. Technical Report UCB/EECS-
2006-183, EECS University of California, Berkeley.
Chen, T. C. L. and Verbrugge, C. (2010). A protocol for
distributed collision detection. In Proceedings of the
9th Annual Workshop on Network and Systems Sup-
port for Games, NetGames ’10, pages 6:1–6:6. IEEE
Press.
Cosenza, B. (2010). Efficient distributed load balancing for
parallel algorithms. PhD thesis, Universita degli studi
di Salerno.
Ericson, C. (2005). Real-time Collision Detection. Morgan
Kaufmann.
Fujimoto, R. (1999). Parallel and distributed simulation.
In Simulation Conference Proceedings, 1999 Winter,
volume 1, pages 122 –131 vol.1.
Hermann, E., Raffin, B., and Faure, F. (2009). Interac-
tive physical simulation on multicore architectures. In
EGPGV, pages 1–8. Eurographics Association.
Hermann, E., Raffin, B., Faure, F., Gautier, T., and Allard,
J. (2010). Multi-GPU and multi-CPU parallelization
for interactive physics simulations. Europar.
Kim, D., Heo, J.-P., and eui Yoon, S. (2008). Pccd: Parallel
continuous collision detection. Technical report, Dept.
of CS, KAIST.
Kim, D., Heo, J.-P., Huh, J., Kim, J., and Yoon, S.-E.
(2009). HPCCD: Hybrid parallel continuous collision
detection using CPUs and GPUs. Comput. Graph. Fo-
rum, 28(7):1791–1800.
Le Grand, S. (2007). Broad-phase collision detection with
cuda. GPU Gems 3 - Nvidia Corporation.
Li, R., Jiang, H., Su, H.-C., Zhang, B., and Jenness, J.
(2007). Speculative and distributed simulation of
many-particle collision systems. In 13th International
Conference on Parallel and Distributed Systems, IC-
PADS ’07, pages 1–8.
Lin, M. C. and Gottschalk, S. (1998). Collision detection
between geometric models: a survey. In 8th IMA Con-
ference on the Mathematics of Surfaces (IMA-98), vol-
ume VIII of Mathematics of Surfaces, pages 37–56.
Miller, S. and Luding, S. (2004). Event-driven molecular
dynamics in parallel. J. Comput. Phys., 193(1):306–
316.
Morgan, G. and Storey, K. (2005). Scalable collision de-
tection for massively multiplayer online games. In
Proceedings of the 19th International Conference on
Advanced Information Networking and Applications -
Volume 1, AINA ’05, pages 873–878. IEEE Computer
Society.
Pabst, S., Koch, A., and Straβer, W. (2010). Fast and
scalable cpu/gpu collision detection for rigid and de-
formable surfaces. In Comput. Graph. Forum, vol-
ume 29, pages 1605–1612.
Raffin, B. and Soares, L. (2006). Pc clusters for virtual real-
ity. In Proceedings of the IEEE conference on Virtual
Reality, VR ’06, pages 215–222.
Tang, M., Manocha, D., and Tong, R. (2009). Multi-core
collision detection between deformable models. In
Symposium on Solid and Physical Modeling, pages
355–360.
Thomaszewski, B., Pabst, S., and Blochinger, W. (2008).
Parallel techniques for physically based simulation
on multi-core processor architectures. Computers &
Graphics, 32(1):25–40.
Tonge, R., Benevolenski, F., and Voroshilov, A. (2012).
Mass splitting for jitter-free parallel rigid body sim-
ulation. ACM Trans. Graph., 31(4):105:1–105:8.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
346
