
A Compact Representation for Topological Decompositions
of Non-manifold Shapes
David Canino and Leila De Floriani
Department of Computer Science, University of Genova, Genova, Italy
Keywords:
Geometric Modeling, Topological Data Structures, Simplicial Complexes, Non-manifold Shapes, Decompo-
sition, Structural Representation.
Abstract:
Simplicial complexes are extensively used for discretizing digital shapes in several applications. A structural
description of a non-manifold shape can be obtained by decomposing the input shape into a collection of
meaningful components with a simpler topology. Here, we consider a unique and dimension-independent
decomposition of a non-manifold shape into nearly manifold components, known as the Manifold-Connected
(MC-) decomposition. We present the Compact Manifold-Connected (MC-) graph, an efficient graph-based
representation for the MC-decomposition, which can be combined with any topological data structure for
encoding the underlying components. We present the main properties of this representation as well as algo-
rithms for its generation. We also show that this representation is more compact than several topological data
structures, which do not explicitly describe the non-manifold structure of a shape.
1 INTRODUCTION
Modeling digital shapes requires efficient representa-
tions, which integrate geometric, topological, and se-
mantic aspects. A digital shape is often discretized
by any simplicial complex. A very common rep-
resentation of this latter is provided by topological
data structures, which encode a subset of simplices,
and the connectivity information among such sim-
plices. In the literature, there is a large amount of
research about these representations (De Floriani and
Hui, 2005). In any case, they describe only combina-
torial information of shapes, and do not expose their
relevant components and their connectivity.
In order to overcome these limitations, a shape
may be decomposed into meaningful components,
which are easily distinguished from the remaining
part of the object so as to reduce the complexity of
a shape. The resulting representation highlights com-
ponents of a shape, and their connectivity, namely it
is a structural model. Here, geometric details are ab-
stracted, and this model provides a high-level descrip-
tion of a shape. Hence, this model is a suitable basis
for semantic annotation and reasoning.
Most structural models are defined for manifold
shapes (Shamir, 2008). Informally, a manifold is a
subset of the Euclidean space such that the neighbor-
hood of each point is homeomorphic to an open ball.
Non-manifold shapes do not satisfy this property at
one or more points, which are called the non-manifold
singularities. Non-manifold shapes arise in several
applications, for instance, as the result of the ideal-
ization process during numerical simulations (Thakur
et al., 2009). There is also an increasing interest for
modeling non-manifold shapes, discretized through
abstract simplicial complexes, which are not neces-
sarily embedded in any Euclidean space, like the
Vietoris-Rips complexes (Gromov, 1987).
The most natural decomposition of any non-
manifold shape consists of cutting this latter along
its non-manifold singularities without modifying the
manifold parts. The resulting representation high-
lights manifold components and their connectivity,
and non-manifold singularities are exposed explicitly.
However, this decomposition is possible only for 2-
complexes. In three or higher dimensions, it may in-
troduce artificial ”cuts” in the input shape, and cre-
ate almost manifold components (De Floriani et al.,
2003). In six or higher dimensions, this decomposi-
tion is not feasible, since the class of manifolds is not
decidable (Nabutovsky, 1996).
Here, we describe a dimension-independent ex-
tension of the Manifold-Connected (MC-) decompo-
sition, introduced in (Hui and De Floriani, 2007) for
2D and 3D shapes. This latter is a structural model for
abstract simplicial complexes, which are decomposed
100
Canino D. and De Floriani L..
A Compact Representation for Topological Decompositions of Non-manifold Shapes.
DOI: 10.5220/0004294501000107
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 100-107
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

as a collection of Manifold-Connected (MC-) com-
ponents, which form a decidable superclass of man-
ifolds. These components may contain non-manifold
singularities, and thus they cannot be represented by
topological data structures specific for manifolds.
In this paper, we propose a two-level graph-based
representation for the MC-decomposition, which we
call the Compact Manifold-Connected (MC-) graph.
Here, the lower level consists of a topological data
structure, capable to represent non-manifold shapes.
In our experiments we have used the Incidence Sim-
plicial (IS) data structure (De Floriani et al., 2010),
and the Generalized Indexed data structure with Ad-
jacencies (IA
∗
) (Canino et al., 2011). The upper level
consists of MC-components, expressed through ref-
erences to simplices in the underlying data structure,
and acts in the same way as a spatial index (Samet,
2006). Then, we present an algorithm for extract-
ing the compact MC-graph from any topological data
structure. We also show that the compact MC-graph,
if combined with the IS and the IA
∗
data struc-
tures, is more compact than a widely used data struc-
ture, namely the Incidence Graph (IG) (Edelsbrun-
ner, 1987), which does not expose the structure of a
shape explicitly. Finally, we also show that the com-
pact MC-graph, combined with the IA
∗
data structure,
is more cost effective than the Initial Quasi-Manifold
(IQM-) decomposition (De Floriani et al., 2003), and
than the Double Level Decomposition (DLD) data
structure (Hui et al., 2006), which contains the IQM-
decomposition of simplicial 3-complexes, embedded
in the Euclidean space E
3
.
The remainder of this paper is organized as fol-
lows. In Section 2, we present some background no-
tions, while, in Section 3, we briefly discuss related
work. In Section 4, we define the MC-decomposition
for a non-manifold shape in arbitrary dimensions. In
Section 5, we introduce and analyze our compact MC-
graph, while, in Section 6, we present some experi-
mental results. Finally, in Section 7, we draw con-
cluding remarks and discuss future work.
2 BACKGROUND NOTIONS
In this section, we introduce background notions,
which we will use throughout the paper.
A Euclidean p-simplex σ is the convex hull of a
set V
σ
of p +1 affine points in the Euclidean space E
n
,
with p ≤ n, and p = dim(σ) is the dimension of σ. A
k-simplex σ
0
, with k ≤ p, generated by k + 1 vertices
in V
σ
, is a k-face of σ. Here, σ and σ
0
are mutually
incident. A finite collection Σ of Euclidean simplices
is a Euclidean simplicial complex if (i) all the faces of
each simplex are in Σ, and (ii) for each pair of sim-
plices σ and σ
0
in Σ, either σ ∩ σ
0
=
/
0, or σ ∩ σ
0
is
in Σ. The maximum dimension d of the simplices in
Σ is the dimension of Σ, which will thus be called a
simplicial d-complex. The domain of a simplicial d-
complex Σ embedded in E
n
, with d ≤ n, is the subset
of E
n
spanned by all the simplices of Σ. A Euclidean
simplicial complex Σ is the geometric realization of
an abstract simplicial complex, which represents the
combinatorial structure of Σ.
The combinatorial boundary b(σ) of a simplex σ
consists of all the faces of σ. The star St(σ) is formed
by all the simplices incident at σ. If St(σ) =
/
0, then
σ is a top simplex. Top d-simplices are called maxi-
mal. A simplicial d-complex Σ is regular if all the top
simplices are maximal. The link Lk(σ) of a simplex
σ consists of all the faces of the simplices in St(σ),
which are not incident at σ. Two k-simplices are ad-
jacent if they share a (k − 1)-face, while two vertices
are adjacent if they are connected by a common edge.
An h-path is any sequence of (h + 1)-simplices
(σ
i
)
k
i=0
such that two consecutive simplices σ
i−1
and
σ
i
are adjacent. Two simplices σ
0
and σ
00
are h-
connected if an h-path (σ
i
)
k
i=0
connects σ
0
and σ
00
.
A subcomplex Σ
0
of any simplicial complex Σ is h-
connected if any two simplices in Σ
0
are h-connected.
A (d − 1)-simplex σ in a regular simplicial d-
complex is combinatorial manifold, if at most two d-
simplices are incident at σ. A k-simplex σ, such that
Lk(σ) is homeomorphic to the (d − k)-sphere, is com-
binatorial manifold, otherwise σ is a non-manifold
singularity. A simplicial d-complex, such that all ver-
tices are combinatorial manifold, is a combinatorial
d-manifold (De Floriani et al., 2003). Note that there
are some algorithmically non-recognizable combina-
torial d-manifolds for d ≥ 6 (Nabutovsky, 1996), thus
the class of combinatorial d-manifolds is not always
decidable. A regular (d − 1)-connected simplicial d-
complex Σ, such that the star of each (d − 1)-simplex
consists of at most two d-simplices, is a combinato-
rial pseudo-manifold.
3 RELATED WORK
In this section, we briefly discuss some structural
models, specific for non-manifold shapes.
The Selective Geometric Complexes (Rossignac
and O’Connor, 1989) exploit decompositions of non-
manifold shapes, encoded through the IG data struc-
ture (Edelsbrunner, 1987), whose cells can be either
open or not connected. In (Desaulniers and Stewart,
1992) the authors propose a decomposition of non-
manifold shapes into regular parts, providing interest-
ACompactRepresentationforTopologicalDecompositionsofNon-manifoldShapes
101

ing topological information. In (Falcidieno and Ratto,
1992) the authors discuss the identification of form
features in simplicial shapes, decomposing them into
regular parts. In (Gueziec et al., 1998) the authors
propose a decomposition-based technique to convert
non-manifold shapes into manifolds without address-
ing geometric aspects. In (Rossignac and Cardoze,
1999) the authors improve over this technique by
taking in account also geometry: the key idea is to
split and duplicate non-manifold singularities in or-
der to avoid self-intersections. A further extension
to volumetric shapes is proposed in (Attene et al.,
2009), which applies local updates on the neighbor-
hood of a non-manifold singularity. In (Pesco et al.,
2004) the authors propose a non-unique combinato-
rial stratification of a cell 2-complex on which they
define editing operators. The Initial Quasi-Manifold
(IQM-) decomposition (De Floriani et al., 2003) is a
unique and dimension-independent decomposition of
abstract simplicial d-complexes. A simplicial shape
is decomposed into IQM-components, which are reg-
ular simplicial d-complexes such that any pair of d-
simplices in the star of each vertex is connected by
a (d − 1)-path such that two consecutive d-simplices
share a (d − 1)-simplex. A graph-based data structure
for representing the IQM decomposition of any shape
embedded in the Euclidean space E
3
is the Double-
Level Decomposition (DLD) data structure (Hui et al.,
2006). In this decomposition, each IQM-component
is encoded through the Indexed data structure with
Adjacencies (IA) (Paoluzzi et al., 1993).
4 THE MC-DECOMPOSITION
In this section, we describe a dimension-indepen-
dent extension of the Manifold-Connected (MC-) de-
composition, initially defined in (Hui and De Floriani,
2007) only for 2D and 3D shapes. This decomposi-
tion is defined on abstract simplicial complexes.
In a regular simplicial d-complex Σ, two d-
simplices σ and σ
0
are said to be manifold-connected
if and only if there exists a (d − 1)-path joining σ and
σ
0
such that two consecutive d-simplices share a man-
ifold (d − 1)-simplex. A (d − 1)-simplex in Σ is man-
ifold if its star contains at most two d-simplices. We
call a (d − 1)-path with such properties as a manifold
(d − 1)-path. Figure 1(a) shows a manifold 1-path (in
yellow) between two triangles σ and σ
0
(in red) in a
regular simplicial 2-complex, namely a torus. A reg-
ular d-complex Σ, such that any pair of d-simplices is
manifold-connected, is a Manifold-Connected comp-
lex (MC-complex) of dimension d. It is clear that any
manifold is also an MC-complex, like torus in Fig-
ure 1(a), but the reverse is not true. In fact, an MC-
complex may contain non-manifold singularities, like
non-manifold edge e in MC-complex of dimension
3 in Figure 1(b). This shows that the class of MC-
complexes is a superclass of combinatorial manifolds.
e
(a) (b)
Figure 1: (a) A manifold 1-path (in yellow) connecting two
triangles σ and σ
0
(in red) in a regular simplicial 2-complex,
which is also an MC-complex of dimension 2. (b) An ex-
ample of MC-complex of dimension 3, which is pinched at
a non-manifold edge e. All the tetrahedra incident at e are
also highlighted (in green).
The MC-decomposition is defined as the decom-
position of any regular simplicial d-complex X into
a collection of MC-complexes of dimension d, called
the MC-components of X , which can be described in
terms of top d-simplices. Manifold-connectivity re-
lation, restricted to top d-simplices in X , defines an
equivalence relation on X . MC-components of X are
the equivalence classes of top d-simplices with re-
spect to the manifold-connectivity relation. Specif-
ically, any top d-simplex σ, called the representa-
tive simplex of X , is equivalent to all the top d-
simplices in X , which are reachable from σ through
a manifold (d − 1)-path. The collection of all the
MC-components in X form the Manifold-Connected
(MC-) decomposition of X . This decomposition is
unique, since any top d-simplex σ in X belongs to
only one MC-component. Several MC-components
in X may have a common intersection, formed by
non-manifold singularities, i.e., a subcomplex of X
of dimension lower than d. Figure 2(a) shows the
MC-decomposition of a regular simplicial 2-complex,
which is formed by three MC-components of dimen-
sion 2, respectively, in red, purple, and green. These
MC-components are connected by two non-manifold
vertices and a non-manifold edge.
A non-regular simplicial d-complex Σ is uniquely
(a) (b)
Figure 2: (a) Three MC-components of dimension 2 for a
regular simplicial 2-complex, respectively, in red, purple,
and green. (b) MC-components of dimension 2 (in green)
and 3 (in purple) for a non-regular simplicial 3-complex.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
102

decomposed into maximal regular subcomplexes Σ
t
p
,
i.e., collections of top p-simplices in Σ, with 0 <
p ≤ d. The Manifold-Connected (MC-) decomposi-
tion of Σ consists of the MC-decompositions of all
the subcomplexes Σ
t
p
. Note that each top p-simplex
in Σ belongs to only one subcomplex Σ
t
p
, thus the
MC-decomposition of Σ is unique. Hence, Σ is de-
composed into MC-complexes of dimension p, for
0 < p ≤ d, which may have a common intersec-
tion, formed by non-manifold simplices. Figure 2(b)
shows the MC-decomposition of a non-regular simp-
licial 3-complex, formed by several MC-components
of dimension 2 (in green) and 3 (in purple), which are
connected by chains of non-manifold edges.
5 THE COMPACT MC-GRAPH
The MC-decomposition for an abstract simplicial d-
complex Σ can be represented through a two-level
data structure. At the lower level, we use any topo-
logical data structure M
Σ
for non-manifold shapes to
encode Σ. On the contrary, the upper level encodes
the connectivity among MC-components through a
graph-based data structure. An MC-component C in
Σ corresponds to a node, containing a reference to the
representative top simplex of C , while any arc corre-
sponds to the common intersection S of several MC-
components, and contains references to non-manifold
simplices in Σ. The resulting representation acts as a
sort of spatial index (Samet, 2006), imposed on any
topological data structure M
Σ
. Note that if Σ is mani-
fold, then its MC-decomposition consists of only one
MC-component. Hence, only a reference to one top
simplex in Σ is stored.
Thus, the main difference among several graph-
based representations of the MC-decomposition de-
pends on the encoding of hyperarcs, since nodes are
described uniquely. The first graph-based represen-
tation of the MC-decomposition, satisfying these de-
sign choices, has been proposed in (Boltcheva et al.,
2011), but it may become verbose due to the presence
of cliques (Canino, 2012).
The Exploded Manifold-Connected (MC-) graph,
introduced in (Canino and De Floriani, 2011), is a
hypergraph G
E
Σ
= (N
Σ
, A
E
Σ
), such that each hyperarc
corresponds to a non-manifold simplex σ, and con-
nects n
σ
nodes, corresponding to the MC-components
incident at σ. We denote the collection of non-
manifold singularities in Σ as Σ
n
. Let n
E
and a
E
be,
respectively, the number of nodes and arcs in G
E
Σ
, then
the storage cost S
E
of the exploded MC-graph, ex-
pressed in terms of references, is equal to:
S
E
= n
E
+
∑
a∈A
E
Σ
(1 + n
σ
) = n
E
+ a
E
+
∑
σ∈Σ
n
n
σ
(1)
Figure 3(b) shows the exploded MC-graph, which
represents the MC-decomposition of non-regular 2D
shape in Figure 3(a). In this case, there are three
hyperarcs, related, respectively to non-manifold ver-
tices v
1
and v
2
, and to non-manifold edge e
1
. For in-
stance, hyperarc in red relates non-manifold vertex v
2
and MC-components C
1
, C
2
, C
3
and C
4
, which are in-
cident at v
2
. The exploded MC-graph is robust with
respect the presence of cliques (Canino, 2012). How-
ever, a subset of MC-components may be duplicated
and related to several hyperarcs, increasing its stor-
age cost (Canino, 2012). For instance, in Figure 3(b),
MC-components C
1
, C
2
, and C
3
are connected twice
by hyperarcs related to non-manifold vertices v
1
and
v
2
. Thus, the number of redundancies must be re-
duced in order to define a compact representation of
the MC-decomposition.
Here, we propose the Compact Manifold-Connec-
ted (MC-) graph, which overcomes all the drawbacks
of the exploded MC-graph. The key idea consists of
grouping together all the hyperarcs of the exploded
MC-graph, which are related to the same subcomplex
of non-manifold singularities, in order to reduce the
storage cost. The compact MC-graph is a hypergraph
G
C
Σ
= (N
Σ
, A
C
Σ
), such that any node corresponds to
one MC-component C , while any hyperarc describes
the maximal set of non-manifold singularities, shared
by MC-components C
1
, . .. , C
k
. Thus, any hyperarc
a = (C
1
, . . . , C
k
) satisfies the following properties:
i) intersection Σ
a
=
T
i=1,...,k
C
i
, is a subcomplex of
Σ, not necessarily connected;
ii) there is no MC-component C
s
6= C
i
, for all i =
1, . . . , k, such that Σ
a
=
T
i=1,...,k
C
i
∩ C
s
.
For each node, corresponding to one MC-component
C, one reference to the representative simplex of C is
stored. For any hyperarc a, k
a
= k references to MC-
components C
1
, . . . , C
k
are stored, plus s
a
references
to non-manifold singularities in Σ
a
. Let n
C
and a
C
be, respectively, the number of nodes and hyperarcs
in G
C
Σ
, then the storage cost S
C
of the compact MC-
graph, expressed in terms of references, is equal to:
S
C
= n
C
+
∑
a∈A
C
Σ
(k
a
+ s
a
) (2)
It is clear that the exploded and the compact MC-
graph have the same number of nodes, thus n
C
= n
E
.
Figure 3(c) shows the compact MC-Graph, which
represents the MC-decomposition of non-regular 2D
shape in Figure 3(a). The resulting hypergraph is mo-
ACompactRepresentationforTopologicalDecompositionsofNon-manifoldShapes
103
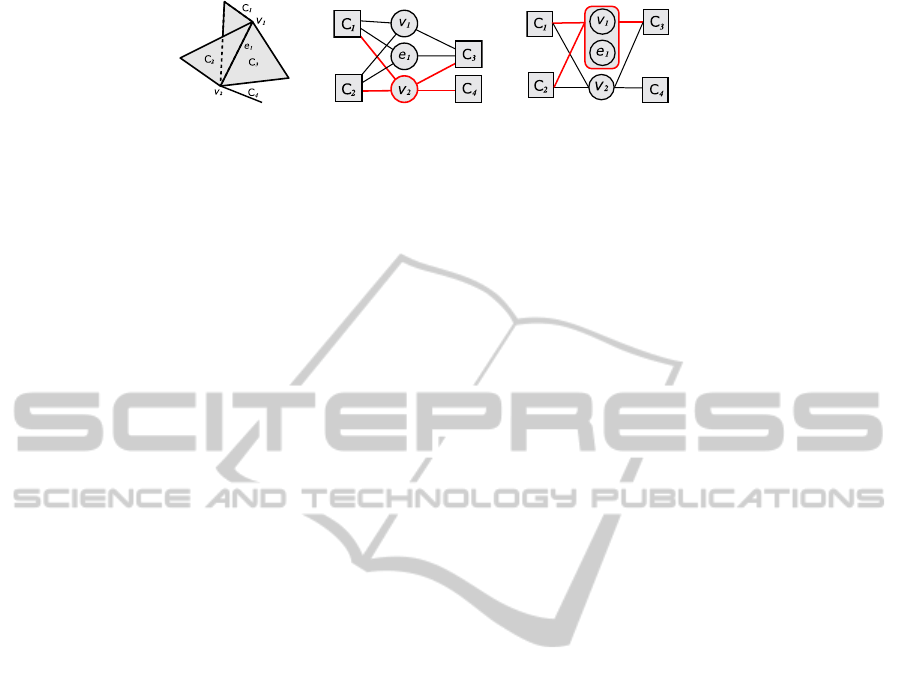
(a) (b) (c)
Figure 3: (a) The MC-decomposition of a non-regular 2D shape is formed by four MC-components, connected through non-
manifold edge e
1
and vertices v
1
and v
2
. Some arcs (in red) in the corresponding (b) exploded and (c) compact MC-graphs.
re compact than the corresponding exploded MC-gra-
ph, shown in Figure 3(b). Here, hyperarc (C
1
, C
2
, C
3
)
(in red) is related to non-manifold singularities v
1
and e
1
, while other hyperarc (C
1
, C
2
, C
3
, C
4
) is related
only to non-manifold vertex v
2
, since C
4
is not inci-
dent at v
1
and e
1
.
The compact MC-graph, if combined with any
topological data structure M
Σ
, can be computed in
two steps. In the first step, all the MC-components
are retrieved as described in (Boltcheva et al., 2011).
Recall that the identification of MC-components is al-
ways defined and completely dimension-independent.
We encode the result of the first step as an array L
such that, for each non-manifold singularity σ, any
location L[σ] contains l
σ
labels of MC-components
incident at σ. Note that this allows defining the ex-
ploded MC-graph immediately. In the second step, all
the hyperarcs in the compact MC-graph are retrieved
by analyzing each location L[σ] through an auxiliary
array B, as follows:
1. If L[σ] contains only one label C , create a tuple
(σ, C ) in B, describing a self-loop related to σ.
Otherwise, sort L[σ] in increasing order as a list
¯
l
σ
, and create a tuple (σ,
¯
l
σ
) in B.
2. Sort all the tuples in B with respect to the lexico-
graphic order of lists of labels. Tuples related to
the same subset of labels are stored in consecutive
locations of B.
3. Create and complete a new hyperarc for each sub-
set of MC-components, identified at Step 2.
The identification of MC-components depends on
the topological data structure M
Σ
, used in combina-
tion with the compact MC-graph. The IA
∗
data struc-
ture (Canino et al., 2011) offers the best support for
these operations (Canino, 2012). On the contrary, re-
trieving the hyperarcs does not depend on M
Σ
. The
time complexity of Step 1 is O(l
σ
logl
σ
) for each non-
manifold simplex σ, since L[σ] is sorted. In Step 2, s
n
locations of B are sorted, one for each non-singularity
σ in Σ (i.e., in Σ
n
), thus the time complexity of this
step is O(s
n
logs
n
). Step 3 can performed in O(1).
Hence, the time complexity required for computing
hyperarcs in the compact MC-graph is linear in:
s
n
logs
n
+
∑
σ∈Σ
n
l
σ
logl
σ
(3)
6 EXPERIMENTAL RESULTS
In our experiments, we have combined the compact
MC-graph with all the data structures within the Man-
grove Topological Data Structure (Mangrove TDS)
framework (Canino, 2012). This latter is a framework
for the fast prototyping of any topological data struc-
ture, representing simplicial complexes without re-
strictions. A C++ implementation of this framework
is contained in the Mangrove TDS Library (Canino
and De Floriani, 2012), released in public domain.
Here, we focus our attention only on the Incidence
Simplicial (IS) data structure (De Floriani et al., 2010)
and the Generalized Indexed data structure with Ad-
jacencies (IA
∗
) (Canino et al., 2011), which offer the
best performance with respect to queries efficiency
and storage cost (Canino, 2012). Note that the IS data
structure represents all the simplices explicitly, while
the IA
∗
data structure offers a more compact represen-
tation by encoding only vertices and top simplices.
In Table 1, we provide experimental comparisons
on our graph-based data structures for a subset of sim-
plicial shapes, freely available from (Hui and De Flo-
riani, 2009). First, we compare the storage costs S
E
and S
C
of the exploded and the compact MC-graph,
respectively. As expected, our results in Table 1 show
that the compact MC-graph is more compact than the
exploded MC-graph: S
E
≈ 2 ×S
C
, on average. This is
due to the clustering policy of MC-components, con-
nected by hyperarcs of the compact MC-graph, as dis-
cussed in Section 5. Note that the number of hyper-
arcs a
C
in the compact MC-graph is smaller than the
number a
E
of hyperarcs in the exploded MC-graph.
For instance, for the 2D shape ”Tower” in Table 1,
a
E
= 1.4k and a
C
= 165, while S
E
≈ 2.8 × S
C
.
We also compare the total storage costs S
C
IS
and
S
C
IA
∗
of the compact MC-graph, combined with the
IS and the IA
∗
data structures, respectively, and the
storage cost S
IG
of the Incidence Graph (IG) (Edels-
brunner, 1987). This latter represents all the sim-
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
104
Table 1: Statistics on the MC-decomposition and the corresponding exploded and compact MC-graphs of some simplicial
2- and 3-complexes, freely available from (Hui and De Floriani, 2009). Here, column s
t
shows the number of top simplices
in the input shape, n
c
is the number of nodes, while a
E
and a
C
are, respectively, the number of arcs in the exploded and in
the compact MC-graphs. Columns S
E
and S
C
contain the storage costs of our graph-based representations, expressed as the
number of references. In addition, columns S
IA
∗
, S
IS
and S
IG
show, respectively, the storage costs of the IA
∗
, IS, and IG data
structures. Finally, S
C
IA
∗
and S
C
IS
denote the storage costs of the compact MC-graph, combined, respectively, with the IA
∗
and
the IS data structures. In other words, S
C
IA
∗
= S
C
+ S
IA∗
and S
C
IS
= S
C
+ S
IS
.
Shape s
t
n
c
a
E
a
C
S
E
S
C
S
IA
∗
S
IS
S
C
IA
∗
S
C
IS
S
IG
Carter 8k 45 641 48 3.8k 1.2k 52k 75k 53.2k 76.2k 95k
Chandelier 8.1k 130 616 96 2.6k 1k 120k 174k 121k 175k 220k
Pinched Pie 2.3k 120 1.4k 192 4.8k 1.9k 17k 20.5k 18.9k 22.4k 25k
Tower 19k 169 1.4k 165 5.9k 2.1k 124k 175k 126.1k 177.1k 221k
Chime 376 27 29 28 133 127 3.2k 8.5k 3.3k 8.6k 12k
Flasks 4k 8 76 6 300 98 29k 75k 29.1k 75.1k 104k
Teapot 13k 2.9k 1.2k 1k 10.4k 10.1k 85k 163k 95.1k 173.1k 220k
Wheel 1.2k 115 136 88 675 563 9.9k 23.7k 10k 24k 33.4k
Table 2: Statistics on storage costs of the compact MC-graph, combined with the IA
∗
data structure, and of the IQM-
decomposition (De Floriani et al., 2003), for several versions of simplicial shape ”Sierpinski”, embedded in the Euclidean
space E
d
, with 2 ≤ d ≤ 5. Here, columns s
0
and s
d
contain, respectively, the numbers of vertices and of d-simplices in the
input shape. Columns S
C
, S
∗
IA
, S
C
IA
∗
, and S
IG
are the same as in Table 1. Finally, column S
IQM
contains the storage cost of the
IQM-decomposition.
Shape s
0
s
d
S
C
S
IA
∗
S
C
IA
∗
S
IQM
S
IG
Sierpinski 2D 88.5k 59k 324k 345k 669k 757k 1.1M
Sierpinski 3D 131k 65.5k 458k 524k 0.98M 1.1M 3.67M
Sierpinski 4D 195.3k 78.1k 664k 781k 1.44M 1.64M 11.6M
Sierpinski 5D 140k 46.6k 467k 559.6k 1M 1.16M 7.7M
plices explicitly, and is commonly used in the ap-
plications (Popovic and Hoppe, 1997). Our experi-
mental results in Table 1 (see columns S
C
IS
, S
C
IA
∗
, and
S
IG
) show that the compact MC-graph is more cost
effective than the incidence graph. In fact, S
IG
≈
1.12 × S
C
IS
and S
IG
≈ 1.45 × S
C
IA
∗
, for 2D shapes, on
average, while, for 3D shapes, S
IG
≈ 1.3 × S
C
IS
and
S
IG
≈ 3.2 × S
C
IA
∗
. Columns S
C
IA
∗
and S
IG
in Table 2
show how the compact MC-graph, combined only
with the IA
∗
data structure, continues to be more cost
effective than the incidence graph in higher dimen-
sions. For instance, S
IG
≈ 14.8 × S
C
IA
∗
for simplicial
4-complexes. This result is very interesting, since the
IG data structure, unlike the compact MC-graph, does
not explicitly describe the structure of a shape, and
does not allow for an efficient identification of non-
manifold singularities (Canino, 2012).
Finally, we have also compared our compact MC-
graph, combined with the IA
∗
data structure, and
the IQM-decomposition (De Floriani et al., 2003) for
simplicial d-complexes, embedded in the Euclidean
space E
d
. For the sake of simplicity, we focus our at-
tention on Sierpinski d-shape, embedded in E
d
, which
is formed by s
0
vertices and s
d
d-simplices. Figure 4
shows a simplified 2D version of this shape. Here,
non-manifold singularities occur only at vertices, and
only d + 1 vertices are manifold. Any non-manifold
vertex v is shared by two d-simplices, and each of
them is both a MC- and an IQM-component.
v
v
v v
Figure 4: Simplified 2D versions of the Sierpinski shape,
embedded in the Euclidean space E
2
. In this shape, any
non-manifold vertex v is shared by two triangles (in black).
The most relevant difference between these two
representations consists of the different encoding for
the connectivity of subcomponents. Each node of
the IQM data structure contains one d-simplex, en-
coded as an IA data structure (Paoluzzi et al., 1993),
thus it requires (2d + 3)s
d
references. Each arc corre-
sponds to a non-manifold vertex v, and connects two
nodes, one for each d-simplex incident at v. In ad-
dition, for each arc, two copies of v are stored in or-
der to guarantee that any d-simplex is a valid IQM-
component. Hence, the storage cost S
IQM
of the IQM
data structure is S
IQM
= (2d + 3)s
d
+ 4(s
0
− d − 1).
On the contrary, in the compact MC-graph, each sim-
plex is stored only once in the underlying IA
∗
data
ACompactRepresentationforTopologicalDecompositionsofNon-manifoldShapes
105

structure, while, for each arc, references to two MC-
components and to a non-manifold vertex are stored.
Hence, the storage cost of the compact MC-graph
is equal to S
C
IA
∗
= (d + 2)s
d
+ 5s
0
− 4(d + 1). Ex-
perimental results in Table 2 (see columns S
C
IA
∗
and
S
IQM
) show that the compact MC-graph tends to be
more cost effective than the IQM data structure for
any dimension. For instance, S
IQM
≈ 1.14 × S
C
IA
∗
and
S
IQM
≈ 1.16 ×S
C
IA
∗
for, respectively, simplicial 4- and
5-complexes. Note that these representations coincide
when encoding manifolds, since they are equivalent to
the IA data structure, plus one additional reference to
a top simplex in the input shape.
In addition, our experimental results in Table 2
(see columns S
IQM
and S
IG
) show that also the IQM
data structure is more compact than the incidence
graph in any dimension, e.g., S
IG
≈ 8 ×S
IQM
for sim-
plicial 4-complexes.
7 CONCLUDING REMARKS
We have presented a structural model for non-ma-
nifold shapes, which are decomposed into a collection
of MC-components, a decidable superclass of mani-
folds of any dimension. We have designed and imple-
mented the Compact MC-graph, a graph-based repre-
sentation for the MC-decomposition (Hui and De Flo-
riani, 2007), which can be combined with any topo-
logical data structure representing non-manifolds.
We have combined the compact MC-graph with
all the topological data structures, which are currently
implemented in the Mangrove TDS Library (Canino
and De Floriani, 2012). Our tests show that the com-
pact MC-graph, if combined with the IS (De Flori-
ani et al., 2010) and the IA
∗
(Canino et al., 2011)
data structures, is more compact than the incidence
graph (Edelsbrunner, 1987), which is a widely used
data structure in several applications. However, this
latter, unlike our compact MC-graph, does not ex-
pose the structure of a shape explicitly, and does not
support the identification of non-manifold singulari-
ties efficiently (Canino, 2012). Our tests also show
that the compact MC-graph is more cost effective than
the IQM-decomposition (De Floriani et al., 2003) and
than the DLD data structure (Hui et al., 2006), even
for high dimensions.
There is an increasing interest in quad and un-
structured hexahedral meshes in geometry process-
ing, animation, and numerical simulations. Some data
structures, specific for simplicial complexes, like the
IS and IA* data structures, can be easily extended to
deal with such shapes, since all the simplifying as-
sumptions, that make the two data structures com-
pact in the case of simplicial complexes, hold also
for quad and hexahedral meshes. Thus, also the MC-
decomposition can be extended to such meshes and
also to more general cell complexes .
Finally, we are designing new graph-based rep-
resentations for the IQM-decomposition. The prop-
erties of the IQM components may allow for a very
compact encoding. In fact, an IQM-component is al-
most manifold, thus it may be representable through
very compact data structures, specific for manifolds,
like (Gurung and Rossignac, 2009; Gurung et al.,
2011a; Gurung et al., 2011b), just to mention few.
ACKNOWLEDGEMENTS
This work has been partially supported by the Italian
Ministry of Education and Research under the PRIN
2009 program, and by the National Science Founda-
tion under grant number IIS-1116747.
REFERENCES
Attene, M., Giorgi, D., Ferri, M., and Falcidieno, B. (2009).
On Converting Sets of Tetrahedra to Combinatorial
and PL Manifolds. Comp.-Aid. Des., 26(8):850–864.
Boltcheva, D., Canino, D., Merino Aceituno, S., L
´
eon, J.-
C., De Floriani, L., and H
´
etroy, F. (2011). An Iterative
Algorithm for Homology Computation on Simplicial
Shapes. Comp.-Aid. Des., 43(11):1457–1467.
Canino, D. (2012). Tools for Modeling and Analysis of Non-
manifold Shapes. PhD thesis, Department of Compu-
ter Science, University of Genova, Genova, Italy.
Canino, D. and De Floriani, L. (2011). A Decomposition-
based Approach to Modeling and Understanding Ar-
bitrary Shapes. In Proc. of the EG Italy, pages 53–60.
Canino, D. and De Floriani, L. (2012). The Mangrove To-
pological Data Structure (Mangrove TDS) Library.
http://mangrovetds.sourceforge.net.
Canino, D., De Floriani, L., and Weiss, K. (2011). IA
∗
: an
Adjacency-based Representation for Non-Manifold
Simplicial Shapes in Arbitrary Dimensions. Comp.
& Graph., 35(3):747–753.
De Floriani, L. and Hui, A. (2005). Data Structures for Sim-
plicial Complexes: an Analysis and a Comparison. In
Proc. of the Symp. on Geom. Proc., pages 119–128.
De Floriani, L., Hui, A., Panozzo, D., and Canino, D.
(2010). A Dimension-independent Data Structure for
Simplicial Complexes. In Proc. of the 19th Int. Mes.
Round., pages 403–420.
De Floriani, L., Mesmoudi, M. M., Morando, F., and Puppo,
E. (2003). Decomposing Non-manifold Objects in Ar-
bitrary Dimension. Graph. Mod., 65(1/3):2–22.
Desaulniers, H. and Stewart, N. (1992). An Extension
of Manifold Boundary Representations to the r-sets.
ACM Trans. on Graph., 11(1):40–60.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
106

Edelsbrunner, H. (1987). Algorithms in Combinatorial Ge-
ometry. Springer.
Falcidieno, B. and Ratto, O. (1992). Two-manifold Cell-de-
composition of r-sets. Comp. Graph. For., 11(3):391–
404.
Gromov, M. (1987). Hyperbolic Groups. Springer.
Gueziec, A., Taubin, G., Lazarus, F., and Horn, W. (1998).
Converting Sets of Polygons to Manifold Surfaces by
Cutting and Stitching. In Proc. of the IEEE Conf. on
Vis., pages 383–390.
Gurung, T., Laney, D., Lindstrom, P., and Rossignac, J.
(2011a). SQuad: a Compact Representation for Tri-
angle Meshes. Comp. Graph. For., 30(2):355–364.
Gurung, T., Luffel, M., Lindstrom, P., and Rossignac, J.
(2011b). LR: Compact Connectivity Representation
for Triangle Meshes. ACM Trans. on Graph., 30(4).
Gurung, T. and Rossignac, J. (2009). SOT: Compact Repre-
sentation for Tetrahedral Meshes. In Proc. of the ACM
Conf. on Sol. and Phys. Mod., pages 79–88.
Hui, A. and De Floriani, L. (2007). A Two-level Topo-
logical Decomposition for Non-Manifold Simplicial
Shapes. In Proc. of the ACM Conf. on Sol. and Phys.
Mod., pages 355–360.
Hui, A. and De Floriani, L. (2009). The Non-Manifold Me-
shes Repository. http://indy.disi.unige.it/nmcollection.
Hui, A., Vaczlavik, L., and De Floriani, L. (2006). A
Decomposition-based Representation for 3D Simpli-
cial Complexes. In Proc. of the Symp. on Geom. Proc.,
pages 101–110.
Nabutovsky, A. (1996). Geometry of the Space of Trian-
gulations of a Compact Manifold. Comm. in Math.
Phys., 181:303–330.
Paoluzzi, A., Bernardini, F., Cattani, C., and Ferrucci, V.
(1993). Dimension-Independent Modeling with Sim-
plicial Complexes. ACM Trans. on Graph., 12(1):56–
102.
Pesco, S., Tavares, G., and Lopes, H. (2004). A Stratifi-
cation Approach for Modeling Two-dimensional Cell
Complexes. Comp. & Graph., 28:235–247.
Popovic, J. and Hoppe, H. (1997). Progressive Simplicial
Complexes. In Proc. of the ACM SIGGRAPH, pages
217–224.
Rossignac, J. and Cardoze, D. (1999). Matchmaker: man-
ifold BReps for Non-manifold R-sets. In Proc. of the
ACM Symp. on Sol. Mod. and Appl., pages 31–41.
ACM Press.
Rossignac, J. and O’Connor, M. (1989). A Dimension-
independent Model for Point-sets with Internal Struc-
tures and Incomplete Boundaries. In Geom. Mod. for
Prod. Eng., pages 145–180. North-Holland.
Samet, H. (2006). Foundations of Multidimensional and
Metric Data Structures. Morgan Kaufmann.
Shamir, A. (2008). A Survey on Mesh Segmentation Tech-
niques. Comp. Graph. For., 27(6):1539–1556.
Thakur, A., Banerjee, A. G., and Gupta, S. K. (2009). A
Survey of CAD Models Simplification Techniques for
Physics-based Simulation Applications. Comp.-Aid.
Des., 41(2):65–80.
ACompactRepresentationforTopologicalDecompositionsofNon-manifoldShapes
107
