
A Pyramid of Concentric Circular Regions to Improve Rotation
Invariance in Bag-of-Words Approach for Object Categorization
Arnaldo Cˆamara Lara and Roberto Hirata Jr.
Institute of Mathematics and Statistics, University of Sao Paulo, Sao Paulo, Brazil
Keywords:
Spatial Pyramids, Rotation-Invariant, Bag-of-Words, Object Categorization.
Abstract:
The bag-of-words (BoW) approach has shown to be effective in image categorization. Spatial pyramids in
conjunction to the original BoW approach improve overall performance in the categorization process. This
work proposes a new way of partitioning an image in concentric circular regions and calculating histograms
of codewords for each circular region. The histogram of the entire image is concatenated forming the image
descriptor. This slight and simple modification preserves the performance of the original spatial information
and adds robustness to image rotation. The pyramid of concentric circular regions showed to be almost 78%
more robust to rotation of images in our tests compared to the traditional rectangular spatial pyramids.
1 INTRODUCTION
Object recognition is a very active research area in
Computer Vision (CV). Several approaches are used
to deal with this problem. One of the most used and
successful ones is the bag-of-words (BoW) approach.
It consists of clustering the local features in a prede-
termined number of centers, the codewords or visual
words. The collection of visual words forms the vi-
sual dictionary. The final descriptor of an image is
a frequency histogram of these visual words (Csurka
et al., 2004). Spatial pyramid is a technique that adds
some spatial information in the BoW approach and it
improves the final results (Lazebnik et al., 2006).
A big drawback in the use of spatial pyramids in
the BoW approach is that it is not rotation-invariant.
Rotation invariance is not important for a lot of ob-
jects like mountains, cars, houses, buildings, etc.
These objects are usually presented in a scene without
variations in rotation. However cans, bottles, shoes,
pens or books are examples of objects that can be pre-
sented in a scene in different angles of rotation. For
a human being, it is easy to identify a bottle or a can
independent of its rotation in the scene. However, al-
gorithms for object categorization do not treat these
differences in rotation appearance without a cost.
In this work, we propose a pyramid of concentric
circular regions in conjunction with a visual dictio-
nary to improve the rotation invariance of object cat-
egorization algorithms. The piramid is formed by a
collection of concentric circles where the frequency
histograms of visual words are computed and the fi-
nal descriptor is the concatenation of the frequency
histogram of each circular region and the histogram
of the entire image.
This text is organized in the following way. In
this section, we introduced the problem and the mo-
tivation of our proposed modification in the spatial
pyramids. The next section describes the main ap-
proaches used to deal with the object recognition
problem. The main contribution of this work, the
pyramid of concentric circular regions, is described
in Section 3. Section 4 gives details about the imple-
mentation of the techniques described in this work:
descriptor, classifier and database used. Section 5 de-
scribes the experiments and shows the results. The
results of experiments are analysed in Section 6. Fi-
nally, Section 7 concludes the work and gives some
directions for future works.
2 OBJECT RECOGNITION
From all possible tasks of CV area, object recogni-
tion is among the most challenging ones and it is also
a very active research area (Szeliski, 2011). Even
the state-of-art algorithms are unable to recognize all
objects in all type of scenes in all possible condi-
tions. Objects can be presented in different view-
points, scales or sizes. They can be in a different po-
sitions, rotated or ocluded in the scenes. Changes in
687
Câmara Lara A. and Hirata Jr. R..
A Pyramid of Concentric Circular Regions to Improve Rotation Invariance in Bag-of-Words Approach for Object Categorization.
DOI: 10.5220/0004298806870692
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 687-692
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

the lightning conditions can vary the appearance of
objects. Therefore, many different situations can pro-
duce a big variability in the aspects of objects.
The object recognition problem can be divided
into some smaller sub-problems. If one wants to clas-
sify an object already detected in a scene as belonging
to a class of a set of possible classes, the problem is
named categorization. Categorization is an important
task. When we know the category of an object in a
scene, it is known what can be done with this object.
That is very important to the semantic understanding
of a scene.
Categorization of objects is an extremely difficult
task and, up to date, the algorithms did not reach a
2-years child level of accuracy in the results of object
categorization (Szeliski, 2011). Categorization algo-
rithms only have good performance classifying an ob-
ject as one of a set of known classes in a closed world
collection. An adult person can recognize tens of
thousands of different object categories. As the num-
ber of known classes increase, the accuracy of clas-
sification process decreases. For 10000 image cate-
gories, the best accuracy is less than 5% (Deng et al.,
2010).
The first successful approach used to handle this
task was the BoW. It appeared in text classification
area and it was adapted to be used to classify objects
detected in a scene (Cula and Dana, 2001). It is robust
to variability of appearance of objects in the scene, to
cluttered background and to changes in the lightning
conditions. It showed computational efficiency and
it has become widely used since then (Csurka et al.,
2004). The main steps of BoW approach are:
• Extraction of local features. Local features are
known to be very efficient in the task of object
detection and categorization. They are computed
using a spatial area near the pixel of interest.
• Construction of the visual dictionary. The set
of local features are clustered in some number
of centers, generally using k-means (Duda et al.,
2001). The center of each cluster is a represen-
tative feature of all features in its neighbourhood.
The collection of all centers of clusters forms the
visual dictionary.
• Representation. Local features extracted from
training and testing image sets are translated to
visual words. Each local feature is represented
by its nearest visual word. The final descriptor is
the frequency histogram of the visual words from
each image.
• Learning. A classifier is trained using labeled de-
scriptors to build a model for each class of the im-
age collection.
Spatial Pyramids is an extension of the BoW ap-
proach that adds spatial information in the orderless
features of the BoW significantly improving the over-
all performance (Lazebnik et al., 2006).
Spatial pyramids consist of partitioning an image
in increasingly smaller sub-regions and computing
BoW technique in each sub-region. Spatial pyramids
have a sequence of L levels. Each level l ∈ 0, ..., L− 1
has 2
2∗l
sub-regions. Spatial pyramids are just an ex-
tension of the traditional BoW approach. In the case
of L = 1, the spatial pyramid technique is reduced to
the standard BoW approach.
3 PYRAMID OF CONCENTRIC
CIRCULAR REGIONS
A pyramid of concentric circular regions (PCCR) is
proposed in this work to substitute spatial pyramids
in object categorization when rotation-invariance is a
desirable property. A PCCR is built using L levels,
where the last level, level L, is the whole image and
the other levels, level l where l ∈ 1..L − 1, are con-
centric circular regions with increasing radii centered
in a point P passed as a parameter. The first level
has a radius equals a factor R of the smaller axis of
the image (height or width). The next level has a ra-
dius of 2× R, and so on. The last level, level L, is
the entire image. The area of a level l includes the
area of level l − 1. For each region, a set of local
descriptors are extracted and we translate these de-
scriptors into codewords. So, each region is repre-
sented as a normalized frequency histogram of code-
words, following the BoW approach. A set of weights
ω
i
, with
∑
L
i=1
ω
i
= 1, is applied to the histograms of
each level. The final descriptor is the concatenation
of weighted frequency histogram of visual words of
each region. We excluded from the final descriptor
the frequency of the codeword used to map the re-
gions outside the circular region. Therefore, for a vi-
sual dictionary of C codewords, the size of the final
descriptor is L× (C− 1) dimensions.
Figure 1 shows an image of class BACK-
GROUND Google and the same image rotated in
196
◦
. The second row shows the plots of the descrip-
tor of both images in the BoW approach using a visual
dictionary of 600 codewords. The next row shows a
plot of descriptors of both images in BoW + spatial
pyramids in 2 levels. The first level has one regionand
next level has 4 regions. Descriptors of each region
are translated to codewords of the same visual dictio-
nary. Final descriptors of each image totalize 3000
dimensions. The last row shows the plots of descrip-
tors in PCCR approach. It was used 4 levels and the
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
688
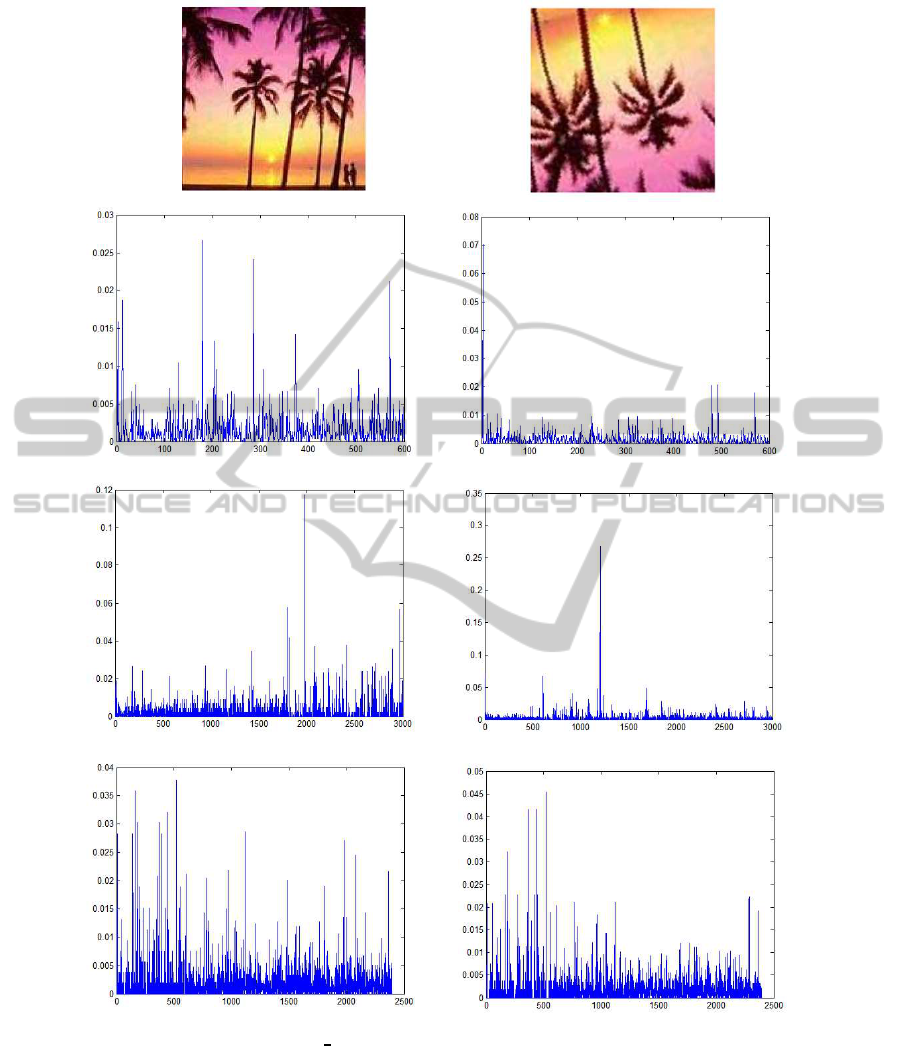
Figure 1: Original image of BACKGROUND Google and a rotated image (196
◦
of rotation). The second row shows the
descriptor of each image in the traditional BoW with 600 codewords. The third row shows the descriptors of both images in
BoW + spatial pyramid of 2 levels totalizing 3000 dimensions and the last row shows the descriptors of the images using the
PCCR with 2396 dimensions.
same 600 codewords visual dictionary. The final de-
scriptor in PCCR approach has 2396 dimensions for
each image (= 4 levels ×(600− 1) codewords).
To calculate the difference between the descrip-
tors computed using the BoW + spatial pyramid and
the PCCR, we applied the chi-squared distance be-
tween the two final descriptors of original and ro-
tated image. For BoW + spatial pyramid approach,
the difference between the two descriptors is 3.4055
and for the PCCR the difference is 1.2146. Therefore,
APyramidofConcentricCircularRegionstoImproveRotationInvarianceinBag-of-WordsApproachforObject
Categorization
689
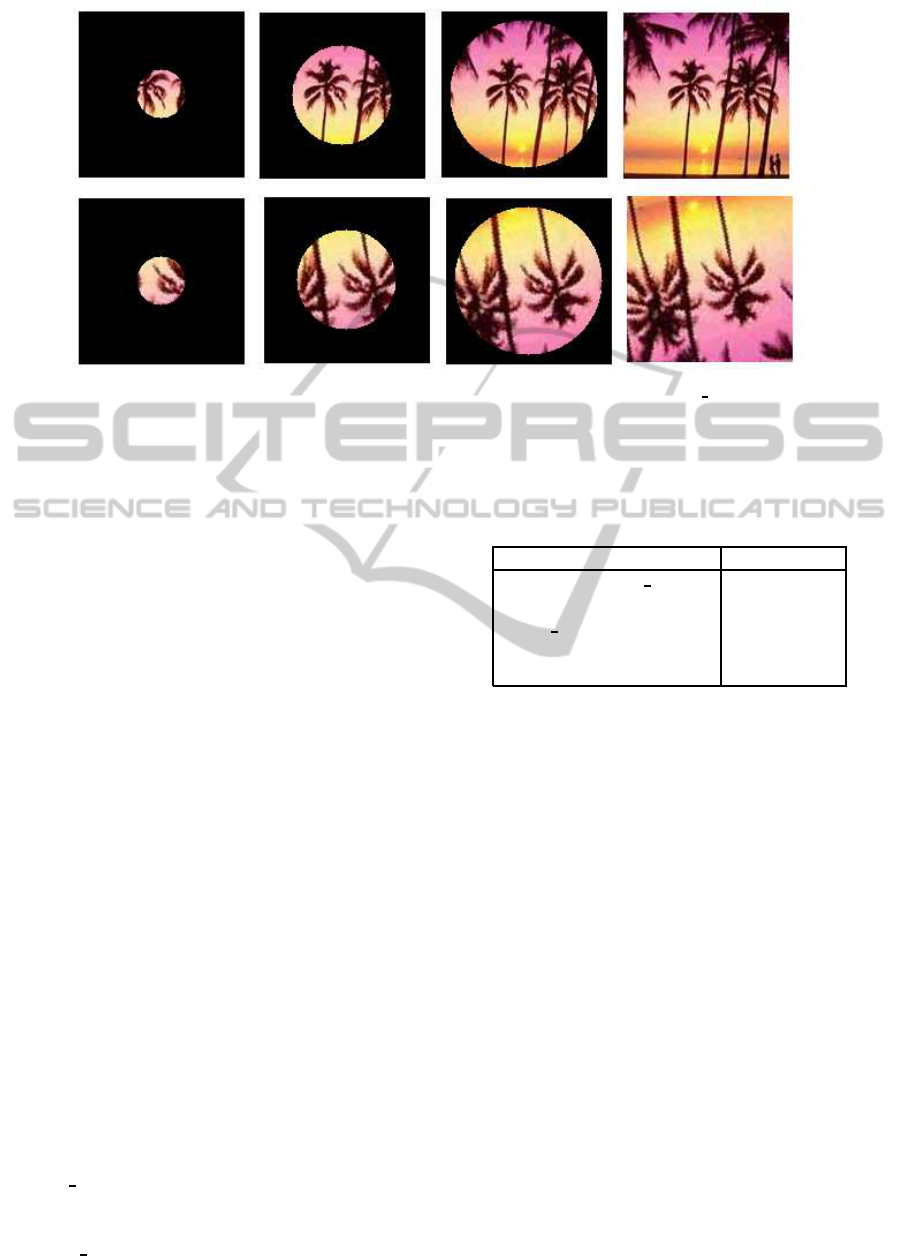
Figure 2: This figure shows the same images of Figure 1. The original image of the BACKGROUND Google class of Caltech-
101 database and the image rotated in 196
◦
. It shows the 4 regions of the PCCR approach for each image. The first column
shows the first circular region with radius of 15% of image’s height, the next column shows the second region and so on, until
the last column showing the entire image that is the fourth region used to calculate the final descriptor.
for the same rotation, a PCCR produced a smaller
difference between the two descriptors. As the pro-
posed spatial approach has 2396 dimensions and the
original rectangular spatial pyramids has 3000 di-
mensions, we calculated the average difference for
each dimension. The result for spatial pyramid is
3.4055 ÷ 3000 = 1.1352 × 10
−3
and the result for
PCCR is 1.2146 ÷ 2396 = 5.0693 × 10
−4
. So, the
PCCR has also a smaller average difference for each
dimension.
Figure 2 shows the same images of Figure 1 and
each region used to calculate the final descriptor.
4 IMPLEMENTATION
In this section, we describe some of the implemen-
tation details. We tested the experiments in Caltech-
101 database (Fei-Fei et al., 2006). It has 101 differ-
ent categories of images. Most of the classes have a
relative small number of images, but 5 classes have
hundreds of images. This subset of the database
is named “Tiny” subset and some papers report re-
sults in this subset (Sivic et al., 2005). There is not
occlusion in the images, there is just one object in
each image and the database is considered easy for
object categorization. Table 1 shows the 5 classes
of the Tiny subset of Caltech-101 database and the
number of samples for each class. The class BACK-
GROUND Google is composed by random images.
There is no specific pattern in the images there. Faces
is composed by faces and some background area. The
class Faces easy shows faces of different people in
Table 1: Classes of tiny subset of Caltech-101 database and
number of samples per class.
Class # of samples
BACKGROUND Google 467
Faces 435
Faces easy 435
Leopards 200
Motorbikes 798
the same way as the class Faces, but less background
area is visible in the images. The class Leopards
shows different images of leopards in different situ-
ations in nature and the class Motorbikes shows dif-
ferent motorbikes in lateral view.
The descriptor used is Pyramidal Histogram of Vi-
sual Words (PHOW) that is a SIFT-derived descrip-
tor (Bosch et al., 2007). It does not use the SIFT key-
point detector but it computes the SIFT descriptor in a
dense grid of points. The SIFT descriptor is computed
using different neighbourhood areas. It is often used
in conjunction with the BoW approach and the spa-
tial pyramids. The PHOW descriptor, BoW approach
and spatial pyramids are reported as the state-of-art in
object categorization (Wang et al., 2010).
We use the Support Vector Machines (SVM) clas-
sifier to model the classes (Cortes and Vapnik, 1995).
It is the most used classifier in object recognition
problems (Szeliski, 2011). Training is done using
data composed by ordered pairs (x
i
, y
i
), i = 1, ..., L,
where x
i
∈ R
D
, L is the size of training set and D is
the number of dimensions of the training points and
y
i
∈ {−1, +1}. For the classification, it is necessary
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
690
to solve the optimization problem of minimizing:
1
2
kwk
2
+C
L
∑
i=1
ξ
i
, (1)
where y
i
(x
i
.w+ b) − 1 + ξ
i
≥ 0 ∀ i, that is a decision
boundary more flexible than a pure linear classifica-
tion. If the data points are not linearly separable, it
is necessary to use the “kernel trick” that is a special
function, the kernel function, that maps the training
points into a higher dimension space where data can
be linearly separable. The kernel function depends on
the nature of the problem.
5 EXPERIMENTS AND RESULTS
This section reports the experiments done in this
work. The experiments used PHOW descriptor and
SVM classifier using chi-squared kernel (Section 4).
It has used 100 images of each class of the Tiny subset
of Caltech-101 database for the training phase. A total
of 250 images were used in the test phase, 50 images
of each class. A multiclass approach was used, each
image of the test set has one object belonging to each
one of the 5 classes of the subset. The algorithm re-
sponses the most likely class of each image of the test
set. PHOW descriptor calculates the SIFT descriptor
using different neighbourhood areas. We used neigh-
bourhood areas with radius of 2, 4, 6 and 10 pixels.
PHOW descriptor uses a dense grid of points. The
distance between two consecutive points is 5 pixels.
It was used 3 approaches to deal the problem: BoW,
BoW + Spatial Pyramids and the proposed PCCR. For
PCCR approach, we used L = 4 levels, a visual dic-
tionary of PHOW descriptor with C = 600 codewords
and the same weight for each level (ω
i
=
1
L
). These
values were empirically chosen. The point P, center
of concentric circular regions, used were the center of
each image.
For each tested approach, two experiments were
done: one using the original images of the test set
and other one using random angles of rotation applied
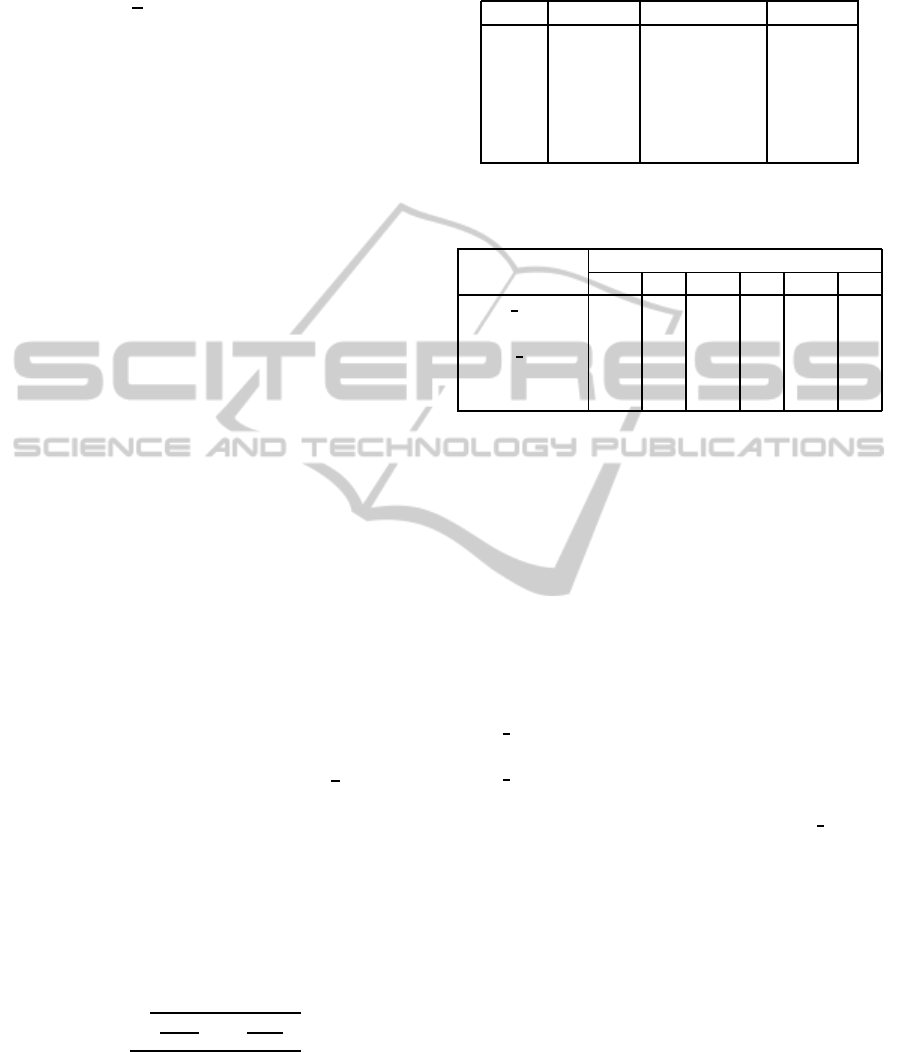
in the images. Figure 3 shows some of images used
and their rotated version. The images are resized by a
factor F computed by the following formula:
F =
q
(
height
2
)
2
+ (
width
2
)
2
height
, (2)
where height and width are the original measurements
of the image. After the image is resized by the factor
F, it is rotated by a random angle and a crop centered
keep the final image with the same size of the origi-
nal image. This procedure avoid to show background
Table 2: Accuracy of the experiments using 3 different ap-
proaches in rotated and non-rotated test images.
Expt. Rotation Approach Acc.(%)
1 No BoW 96.4
2 Yes BoW 42.0
3 No BoW + SPM 96.8
4 Yes BoW + SPM 43.2
5 No PCCR 98.4
6 Yes PCCR 76.8
Table 3: Accuracy (%) for each class of tested subset of
Caltech-101 database in each performed experiment.
Classes
Experiments
1 2 3 4 5 6
BCK Google 84 74 86 90 94 72
Faces 98 2 98 10 100 86
Faces easy 100 96 100 90 100 84
Leopards 100 22 100 10 98 92
Motorbikes 100 16 100 16 100 50
color in the final image. Table 2 shows the accuracy
obtained by the 6 experiments and Table 3 shows the
accuracy of the 6 experiments of each tested class.
6 ANALYSIS OF RESULTS
We can see in Experiments1 and 3 that using the BoW
approach and spatial pyramids the problem of object
categorization using these 5 classes of Caltech-101 is
practically solved. Less than 10 misses in 250 test-
ing images, an accuracy of above 96%. Three classes,
Faces easy, Leopards and Motorbikes, reached 100%
of correctness. The two faces classes, Faces and
Faces easy, have a big intraclass similarity but, still,
they reached 98% and 100% of accuracy respectively.
Other complex class is the BACKGROUND Google
class. It tries to model any other kind of category in
the world what is practically impossible. However,
in this closed world problem, this class got 84% and
86% of accuracy in the two experiments.
The results are completely different when the test-
ing set is rotated. The overall accuracy of the object
categorization dropped to 42% without the use of spa-
tial pyramids (Experiment 2) and 43.2% using spatial
pyramids (Experiment 4). A completely different re-
sults when compared to Experiments 1 and 3.
Experiment 5 showed our proposed approach in
the normal dataset without rotation in the test set. We
got a surprisingly 98.4% of accuracy. The overall
accuracy did not dropped using this alternative spa-
tial pyramid and there is a significant improvement
of results where rotations are presented in the tests.
APyramidofConcentricCircularRegionstoImproveRotationInvarianceinBag-of-WordsApproachforObject
Categorization
691
Figure 3: It shows a sample of image for each class of the testing set. In the first line, it shows the original images and
in the second line, it shows the rotated image. From left to right column, the classes are: BACKGROUND Google, Faces,
Faces Easy, Leopards and Motorbikes.
The proposed approach got 76.8% of accuracy against
43.2% of accuracy using the BoW + spatial pyramids.
Almost 78% better when compared to the traditional
approach.
7 CONCLUSIONS
AND FUTURE WORK
In this work, we treat the rotation invariance in the
object categorization problem. The state-of-art meth-
ods used to deal the problem do not treat the pres-
ence of rotation objects in the scene. This property is
important for some kinds of objects and scenes. We
propose, for spatial quantization, a pyramid that uses
a collection of circular concentric areas and showed
to be more robust to rotation of objects in the scene.
When compared to the traditional spatial pyramids,
the results showed very promising results improving
the accuracy in almost 78% in a scenary of pres-
ence of rotation of objects. As future work, we are
planning to test some other parameters for the pro-
posed approach like a different number of levels for
the pyramid, different size of radius in each level of
the pyramid, different descriptors like SURF that is
reported to be more robust to rotation than SIFT and
PHOW and to test in a different and more challeng-
ing database. In a more realistic scenario, just some
objects were rotated while background remains un-
changed. Still, rotation can occur around different
points in 3D space.
ACKNOWLEDGEMENTS
We would like to thanks the reviewers for the valuable
contributions. The authors are partially supported by
CNPq, the Brazilian National Research Council.
REFERENCES
Bosch, A., Zisserman, A., and Munoz, X. (2007). Image
classification using random forests and ferns. In 11th
International Conference on Computer Vision, pages
1–8, Rio de Janeiro, Brazil.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine Learning, 20(3):273.
Csurka, G., Dance, C., Fan, L., Willamowski, J., and Bray,
C. (2004). Visual categorization with bags of key-
points. In ECCV International Workshop on Statis-
tical Learning in Computer Vision, Prague, Czech Re-
public.
Cula, G. and Dana, J. (2001). Compact representation of
bidirectional texture functions. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, pages 1041–1047, Kauai, USA. IEEE
Computer Society.
Deng, J., Berg, A., Li, K., and Fei-Fei, L. (2010). What does
classifying more than 10,000 image categories tell us?
Computer Vision–ECCV 2010, pages 71–84.
Duda, R. O., Hart, P. E., and Stork, D. G. (2001). Pattern
Classification. John Wiley and Sons.
Fei-Fei, L., Fergus, R., and Perona, P. (2006). One-
shot learning of object categories. IEEE Transac-
tions On Pattern Analysis and Machine Intelligence,
28(4):594–611.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for rec-
ognizing natural scene categories. In Computer Vi-
sion and Pattern Recognition, 2006 IEEE Computer
Society Conference on, pages 2169–2178, New York,
USA.
Sivic, J., Russell, R., Efros, A., Zisserman, A., and Free-
man, W. (2005). Discovering objects and their loca-
tion in images. In Computer Vision, 2005. ICCV 2005.
Tenth IEEE International Conference on, pages 370–
377, San Diego, USA. IEEE Computer Society.
Szeliski, R. (2011). Computer Vision: Algorithms and Ap-
plications. Springer-Verlag.
Wang, J., Yang, J., Yu, K., Lv, F., Huang, T., and Gong, Y.
(2010). Locality-constrained linear coding for image
classification. In Computer Vision and Pattern Recog-
nition, IEEE Computer Society Conference on, pages
3360–3367, San Francisco, USA. IEEE Computer So-
ciety.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
692
