
Robust Guided Matching and Multi-layer Feature Detection
Applied to High Resolution Spherical Images
Christiano Couto Gava, Alain Pagani, Bernd Krolla and Didier Stricker
German Research Center for Artificial Intelligence, Trippstadter Straße 122, Kaiserslautern, Germany
Keywords:
Robust Guided Matching, Feature Detection, Spherical Imaging, 3D Reconstruction, Multi-view Stereo.
Abstract:
We present a novel, robust guided matching technique. Given a set of calibrated spherical images along with
the associated sparse 3D point cloud, our approach consistently finds matches across the images in a multi-
layer feature detection framework. New feature matches are used to refine existing 3D points or to add reliable
ones to the point cloud, therefore improving scene representation. We use real indoor and outdoor scenarios
to validate the robustness of the proposed approach. Moreover, we perform a quantitative evaluation of our
technique to demonstrate its effectiveness.
1 INTRODUCTION
The need for generation of accurate 3D models of
objects and scenes is increasing as technologies for
three-dimensional visualization become more popu-
lar and accessible. In this scenario, computer vision
algorithms play a fundamental role. Specifically, 3D
reconstruction techniques are a promising instrument
to support promotion, training, games or education.
Nowadays, image-based reconstruction algo-
rithms are able to produce models of small objects
that can compete with those produced by laser scan
techniques (Schwartz et al., 2011), (N¨oll et al., 2012).
These methods demand a highly controlled environ-
ment for capturing the images, particularly concern-
ing lighting conditions. Thus they are not suitable for
reconstructing scenes in out-of-lab situations.
Nevertheless, reconstruction of large scenes is
an attractive tool for documentation, city planning,
tourism and preservation of cultural heritage sites
(Hiep et al., 2009), (Furukawa et al., 2010), (Pagani
et al., 2011). In this context, several reconstruction
approaches adopt a region growing strategy, in which
3D points are used as seeds and the scene is gradually
reconstructed as regions grow. However, this strategy
normally fails when the distance between seed points
is large and the final reconstruction is incomplete.
In this paper we present a method that robustly
performs matching of image features to support multi-
view stereo (MVS) algorithms. Our approach is de-
signed to consistently create seeds and improve scene
sampling based on a novel guided matching tech-
nique. It benefits from point clouds produced by
modern Structure from Motion (SfM) algorithms and
imposes a set of constraints to achieve robustness.
Moreover, we propose a multi-layer feature detection
method to allow hierarchical matching designed to
work with any choice of local feature descriptors.
We apply our algorithm to high resolution spheri-
cal images because it has been shown in (Pagani et al.,
2011) and (Pagani and Stricker, 2011) that they are
more suitable to perform SfM. Due to their wide field
of view, these images provide more constraints on
camera motion as features are more often observed.
Therefore, spherical images are more qualified for
guided matching than standard perspective images.
Guided matching has been addressed by other re-
searchers. In (Triggs, 2001) the Joint Feature Dis-
tributions (JFD) are introduced. JFD form a general
probabilistic framework for muli-view feature match-
ing. The idea is to summarize the observed behaviour
of feature correspondences instead of rigidly con-
strain them to the epipolar geometry. Similar to our
work, the method yields confidence search regions in-
stead of searching along the entire epipolar line. In
contrast, our approach explicitly combines 3D infor-
mation with epipolar geometry to define search re-
gions of higher confidence.
The work presented in (Lu and Manduchi, 2004)
shares with ours the independence of image features
used for matching. Both methods only require a fea-
ture detector providing a local descriptor for each fea-
ture and a similarity function. However, Lu and Man-
duchi do not assume calibrated cameras. The method
322
Gava C., Pagani A., Krolla B. and Stricker D..
Robust Guided Matching and Multi-layer Feature Detection Applied to High Resolution Spherical Images.
DOI: 10.5220/0004300603220327
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 322-327
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
was designed for the case of nearly parallel epipo-
lar lines, i.e. the epipoles are at infinity. Thus it
would face challenging issues with spherical images,
because in this case the epipoles are always visible.
The paper is organized as follows: Section 2 in-
troduces the concept of spherical images and related
properties. Section 3 outlines our multi-layer feature
detection framework. The proposed robust guided
matching, our main contribution, is detailed is section
4. Experiments and results are discussed in section 5
and we conclude in section 6.
2 SPHERICAL IMAGES
Spherical images allow to register the entire scene
from a single point of view and may be acquired us-
ing dedicated hardware and software packages. Ac-
cording to the spherical geometry, each point on the
image surface defines a 3D ray r. Analogue to per-
spective imaging, given a 3D point P
W
in world co-
ordinate system (WCS), its counterpart in camera co-
ordinate system (CCS) is P
C
= RP
W
+ t, with R and
t representing the camera rotation matrix and transla-
tion vector. However, different from the perspective
case, the relationship between P
C
and its projection
p onto the image surface is simply P
C
= λp, with λ
being the depth of P
C
. Without loss of generality, we
assume a unit sphere, leading to kpk = 1. Thus, in
this case, the dehomogenization typical of perspective
images is not needed.
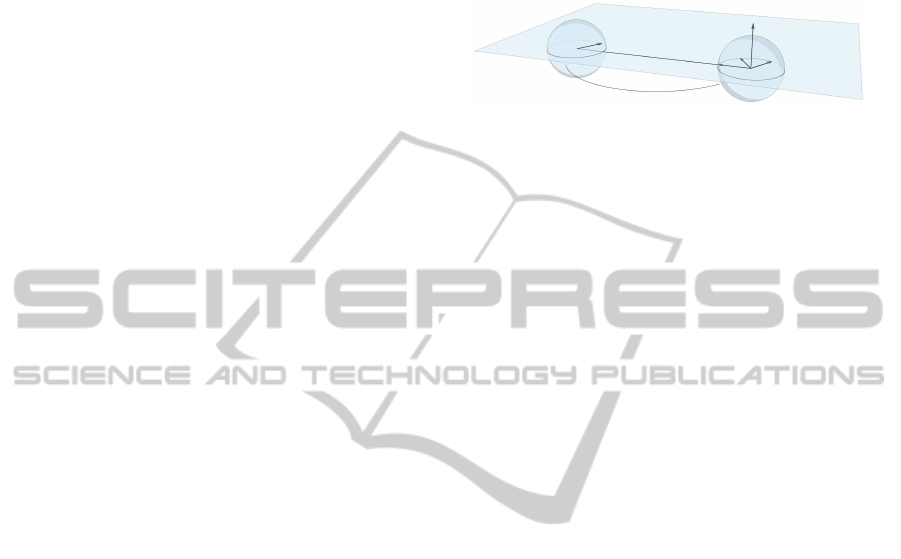
Epipolar Geometry. Consider a pair of spherical cam-
eras I
r
and I
t
. I
r
is regarded as reference while I
t
is re-
garded as target camera. Let R
tr
and t
tr
be the rotation
matrix and the translation vector from I
r
to I
t
. A point
p
r
on the surface of I
r
, along with the centers of the
cameras, define a plane Π, as seen in Figure 1. Π may
be expressed by its normal vector n
Π
= R
tr
p
r
×t
tr
. For
any point p
t
on I
t
and belonging to Π the condition
n
T
Π
p
t
= 0 holds. Thus Π is the epipolar plane defined
by cameras I
r
and I
t
. This is the same result obtained
in the perspective case and it shows that the epipolar
constraint does not depend on the shape of image sur-
face. Nevertheless, to keep consistency with the 3D
scene captured by the images, not every point p
t
on
Π can be a match for p
r
. In fact, only those points
belonging to the arc defined by p
t1
and p
t2
on Figure
1 may be considered for matching. Note that p
t1
is
the epipole on I
t
and p
t2
= R
tr
p
r
. We refer to this arc
as epipolar arc.
Calibration of Spherical Cameras. Our approach
builds on (Pagani et al., 2011) and (Pagani and
Stricker, 2011). Thus, we assume the rotation ma-
trix R and the translation vector t for each camera are
known. Additionally we assume a set of 3D points
resulting from calibration is also provided. This set
may be seen as a coarse representation of the scene
and is referred to as Sparse Point Cloud (SPC).
p
r
I
r
t
I
n
Π
t
p
t
1
p
t
2
p
r
t
R
r
t
t
,
Π
Figure 1: Epipolar geometry of spherical images.
3 MULTI-LAYER FEATURE
DETECTION
In this section we focus on the automatic detection of
multiple feature layers. The method consists of hier-
archically detecting features, thus gradually increas-
ing image sampling. Here the main goal is to support
the robust guided matching, which will be detailed in
section 4.
Given an image I, a feature detector F and a pa-
rameter vector ρ controlling the behaviour of F , we
define a feature layer l as
l(I, F , ρ) = { f
u,v
| f
u,v
= F (I(u, v), ρ)}, (1)
where f
u,v
represents a feature detected on image I
with pixel coordinates (u, v). To improve readability
we will drop the subscripts of f
u,v
and refer to it as
f. l(I, F , ρ) may be seen as a vector of features, all
detected using the parameters ρ. Thus it is possible
to define for each image I a set of feature layers L by
varying ρ as
L(I, F , ρ
0
. . . ρ
K−1
) = {l
k
|l
k
= l(I, F , ρ
k
)}, (2)
where k = 0, 1, .., K − 1 and K is the number of layers
to compute.
Furthermore, we set the parameters ρ
0
. . . ρ
K−1
to
produce layers with increasing number of features,
with the first layer holding the most distinctive fea-
tures, i.e. the most reliable ones. If, instead of using
layers, a single large feature vector is computed, the
probability of finding the correct match decreases, be-
cause multiple similar features are usually found, i.e.
several ambiguous matches are stablished. This is the
main motivation to hierarchically create feature lay-
ers: They allow dense image sampling without affect-
ing calibration. In other words, with this hierarchical
approach, it is possible to:
1. obtain a precise calibration by employing only the
first layer(s), i.e. using matches from the most dis-
tinctive features;
RobustGuidedMatchingandMulti-layerFeatureDetectionAppliedtoHighResolutionSphericalImages
323

2. improve performance as less matches need to be
computed for calibration;
3. combine as many layers as necessary to perform
robust guided matching.
In principle, any feature detector computing the lo-
cation of the feature on the image along with a lo-
cal descriptor of its neighborhood could be employed,
such as (Lowe, 2004), (Bay et al., 2008) or (Tola
et al., 2009). Additionally, a similarity function is re-
quired so that descriptors may be compared. In this
work, we employ the same feature detector as pro-
posed in (Pagani et al., 2011) and refer to it as Spher-
ical Affine SIFT (SASIFT). SASIFT was chosen due
to its robustness against the distortion imposed by the
longitude-latitude representation of spherical images.
This is specially important near the image poles.
4 ROBUST GUIDED MATCHING
In this section the main contribution of our approach
is detailed. The goal is to robustly add 3D points to
the SPC to increase the number of seed points for
3D dense reconstruction or to improve the current
(sparse) representation of the scene.
Theoretically, an arbitrary number of layers could
be computed per image. In practice, few layers are
computed because this is already sufficient to achieve
both precise calibration – using the first layer – and
dense image sampling – using the remaining layers.
Yet, these layers may contain several thousands of
descriptors and handling numerous images simulta-
neously is not optimal as computational resources are
limited. Thus, we devise the method for pairs of im-
ages, so that only the corresponding layers have to be
handled. The image pairs are determined according to
their neighborhood relation, which is encoded in a bi-
nary upper triangular matrix N. If N(i, j) = 1, images
I
i
and I
j
are considered as neighbors and matches are
computed between them.
Our algorithm combines multiple feature layers,
3D points from calibration and a set of constraints,
as epipolar geometry, thresholding and symmetric
matching. Moreover, it enforces the consistency of
new 3D points and may be applied recursively, allow-
ing to push the number of points even further.
4.1 The Anchor Points
After calibration, most 3D points in the SPC are cor-
rectly triangulated. However, some outliers remain.
Thus, before applying our guided matching, outliers
are removed according to a local density computed
for each point in the SPC. We denote the filtered point
cloud as S
0
. After filtering, all remaining points are
assumed to be inliers. These points are regarded as
reference and we refer to them as anchor points. We
define an anchor point A as a 3D point in Euclidean
coordinates along with a set Θ holding the images and
the respective features where A is observed.
A =
P
W
∈ ℜ
3
Θ = {(I
i
, f) | λp = R
i
P
W
+ t
i
}
(3)
In Equation 3, p is the image point associated to f.
We also define the SPC as the set S of all anchor
points. To improve readability we sometimes use A
instead of its 3D coordinates P
W
throughout the text.
4.2 Matching based on Anchor Points
In the literature, the term guided matching is usually
regarded as the class of methods searching for corre-
spondences given a constraint. This constraint could
be imposed by epipolar geometry, a dispartity range
on aligned images, a predefined or estimated search
region or any other criteria that restricts the search for
correspondences to a subset of the image pixels.
Our guided matching algorithm is not driven by a
single, but by a set of constraints, as described below.
Given a reference image I
r
, a target image I
t
, and a
feature f
r
detected on I
r
, we search for a feature f
t
on
I
t
under the following constraints:
1. Epipolar geometry: p
T
r
Ep
t
= 0, with E the essen-
tial matrix defined by I
r
and I
t
, p
r
and p
t
are the
unit vectors corresponding to f
r
and f
t
;
2. Threshold: the matching score δ between the de-
scriptors of f
r
and f
t
is above a given threshold τ,
i.e. δ( f
r
, f
t
) > τ;
3. Symmetry: δ( f
r
, f
t
) is the highest score when
symmetric matching is performed, that is, f
r
and
f
t
are the best match when the roles of reference
and target images are swapped;
However, these constraints are usually not suffi-
cient to achieve robust matching because the set of
features f
t
complying with the first two criteria above
is in general large. As a result, the search has to be
done in a large set of potentially ambiguous features.
We propose an approach to overcome this is-
sue. Robustness of guided matching is improved by
combining the constraints outlined above, the anchor
points and a consistency filter. Our method works as
follows: For each feature f
r
a set of anchor points
projecting on a region Ω centered at p
r
is selected.
These points form a subset of S, S
Ω
. Assuming depth
continuity for the points in S
Ω
, they can be used to
determine a depth range [λ
min
, λ
max
] in which the 3D
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
324

point P
f
r
= λp
r
is expected to be. Consequently, the
points P
min
= λ
min
p
r
and P
max
= λ
max
p
r
define on the
epipolar arc on I
t
a confidence region Ψ in which the
correct match f
t
is expected to be, as shown in Fig-
ure 2. This considerably reduces the search region
along the epipolar arc, thus increasing the likelihood
of finding the correct match. Then we apply the sec-
ond and third constraints described above to all fea-
tures in Ψ. Finally, the consistency filter is applied,
which will be detailed in section 4.4.
P
min
P
max
Ω
Ψ
(a)
P
max
P
min
Ψ
Ω
(b)
Figure 2: Determining the confidence region Ψ based on
anchor points. The dots represent the subset S
Ω
. (a) Top
view and (b) Perspective view.
After applying the consistency filter we consider
the following 3 cases: 1. Ψ is empty; 2. Ψ contains
one feature; 3. Ψ contains two or more features. In
the first case, as no reliable match has been found, the
algorithm moves on to match the next feature f
r
. For
the second case, a new anchor point is created and
added to S. Finally, if two or more features remain in
Ψ, we discard the matches to enforce robustness, i.e.
no anchor point is created.
4.3 Matching based on Apical Angles
The approach described above works for features f
r
whose S
Ω
6=
/
0. If no anchor points project onto Ω, f
r
can not be matched based on anchor points. Increas-
ing the size of Ω does not necessarily solve the issue,
as the anchor points in S
Ω
may not be representative
of the true depth range.
We extend our approach to allow “isolated” fea-
tures to be matched. Here we do not use anchor points
to establish a depth range. Instead, we use apical an-
gles. Apical angle is the angle formed by rays ema-
nating from a 3D point towards the centers of the (pair
of) cameras where the 3D point is seen. Then, given
a minimum and a maximum apical angle, α
min
and
α
max
, the depth range is computed as follows. For a
feature f
r
, we compute the 3D points P
min
and P
max
so that the apical angles at P
min
and P
max
are α
max
and
α
min
, as shown in Figure 3. The confidence region Ψ
is determined by the projections of P
min
and P
max
onto
I
t
and the rest of the matching proceeds as before.
r
p
max
α
min
α
Ψ
P
min
P
max
Figure 3: Confidence region Ψ based on apical angles.
4.4 The Consistency Filter
False matches yield 3D points that often violate the
ordering assumption. The Consistency Filter supports
guided matching by identifying such violations and is
explained as follows.
Consider a 3D query point P
q
resulting from the
triangulation of p
r
and p
t
. Let A be an anchor point
whose projections a
r
and a
t
onto I
r
and I
t
are in the
vicinity of p
r
and p
t
, respectively. The vectors p
r
and a
r
define a normal n
r
= p
r
× a
r
on I
r
. Similarly,
n
t
= p
t
× a
t
on I
t
. Given the rotation matrix R
rt
, P
q
is
regarded as consistent if n
r
·R
rt
n
t
> 0 holds for all an-
chor points projecting in the vicinity of p
r
and p
t
. Fig-
ure 4 shows this concept using a single anchor point.
n
r
a
r
p
r
a
t
p
t
n
t
A
P
q
(a)
a
r
P
q
n
r
p
t
a
t
p
r
n
t
A
(b)
Figure 4: Consistency filter. (a) P
q
is considered consistent
and (b) P
q
is considered inconsistent.
5 RESULTS
We applied our algorithm to several different datasets,
all captured with images of 100 MegaPixels (approx-
imately 14000 by 7000 pixels). Here we show two of
them: the Mogao Cave number 322 in China and the
Saint Martin Square in Kaiserslautern, Germany. We
processed these datasets on a machine equipped with
an Intel
R
Xeon
R
CPU W3520 @ 2.67GHz, 24 GB
of RAM, running Ubuntu 11.04 - 64 bits.
5.1 Overview
For all datasets we considered the first feature layer
for calibration and all layers together for robust
matching. As mentioned in section 4.2, our algorithm
may be used recursively. We show this by applying
the matching based on anchor points in two steps. The
first step takes as input the filtered SPC S
0
and outputs
a SPC S
1
containing all points in S
0
along with the
new points. Analogously, the second step takes S
1
as
RobustGuidedMatchingandMulti-layerFeatureDetectionAppliedtoHighResolutionSphericalImages
325
input and delivers S
2
. We considered two parameters:
first, a radius r to compute the region Ω centered at
the reference feature f
r
. We used r = 100 pixels in all
experiments; second, a threshold τ to ensure that only
reliable matches are used to add points.
In this work we normalized the SASIFT descrip-
tors. Thus, our similarity function is given by the
scalar product between the descriptors of f
r
and f
t
,
i.e. −1 ≤ δ( f
r
, f
t
) ≤ 1. The values used for τ were
0.95 and 0.90 in the first and second steps described
above, respectively. Values below 0.90 have also been
evaluated, but the resulting point clouds started to be
corrupted by wrong matches.
Matching based on apical angles takes S
2
as input
and delivers a point cloud referred to as S
3
. The values
used for the angles were α
min
= 3
◦
and α
max
= 45
◦
.
To deal with calibration uncertainties, we considered
features located up to 2 pixels away from the epipolar
arc during computation of the confidence region Ψ.
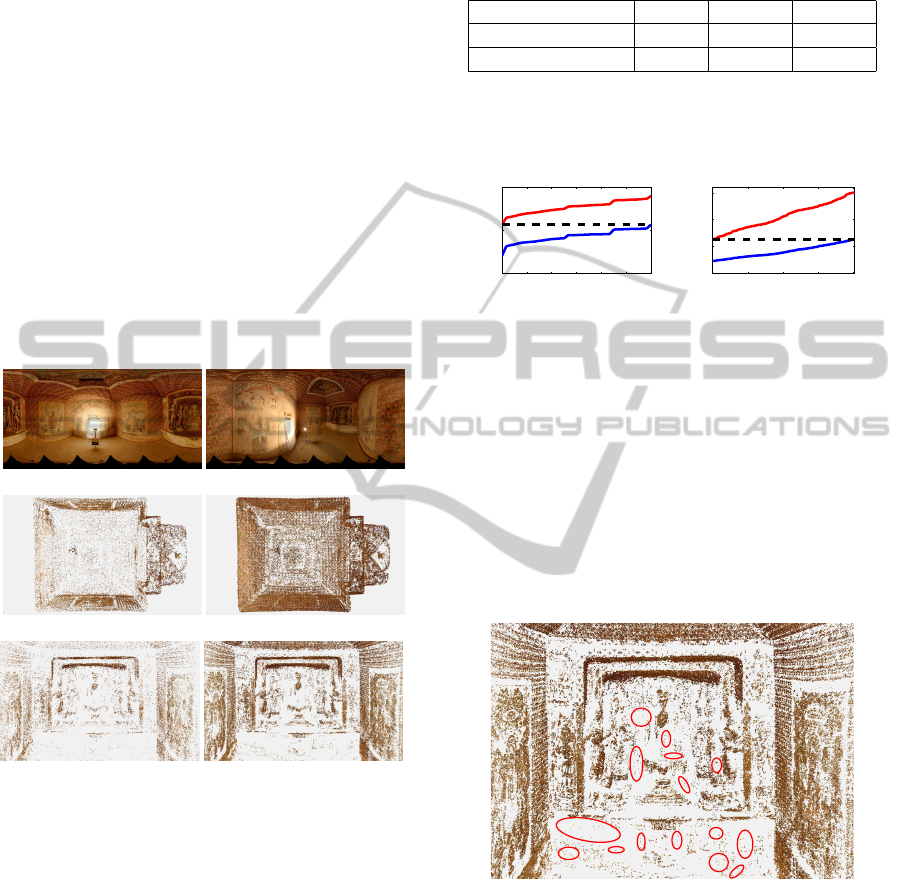
(a) (b)
(c) (d)
(e) (f)
Figure 5: (a) and (b): Two images captured in the Mogao
Cave. (c) and (d): Top view of the cave using S
0
and S
2
. (e)
and (f): Front view of the statues using S
0
and S
2
.
5.2 Mogao Cave
This dataset consists of 9 images taken inside the Mo-
gao Cave number 322. In total, 36 pairs were used
with 3 layers of features computed for each image.
Table 1 summarizes the approximate number of key-
points detected per layer for each image. The third
layer contains roughly 5 times the number of features
in the first layer, i.e. we considerably increased im-
age sampling. Figure 5 shows the results produced
by our algorithm for this dataset. The evolution of
the number of anchor points n is depicted in Figure 6-
(b). The blue curve shows how n raises from S
0
to S
1
Table 1: Approximate number of SASIFT keypoints de-
tected per layer for each image. The lables L1, L2 and L3
identify the corresponding layer.
Dataset L1 L2 L3
Mogao Cave 60000 175000 300000
St. Martin Square 84000 510000 -
during the first matching step. Accordingly, the red
curve illustrates the behaviour of n during the second
matching step, i.e. from S
1
to S
2
.
0 6 12 18 24 30 36
0
2
4
x 10
5
Number of pairs
Number of points
(a)
0 40 80 120 160
0
5
10
15
x 10
4
Number of pairs
Number of points
(b)
Figure 6: Number of points versus number of image pairs
for the first (blue) and second (red) matching steps. (a) Mo-
gao Cave: S
0
, S
1
and S
2
contain 84591, 228044 and 359981
anchor points. (b) Saint Martin Square: S
0
, S
1
and S
2
con-
tain 16627, 57706 and 100179 anchor points.
Figure 7 shows the importance of matching based
on apical angles. In comparison to Figure 5-(f), the
ellipses indicate areas where new points were added.
This result was produced by first computing S
3
, which
delivered 28227 new anchor points, and then applying
the matching based on anchor points one more time,
with τ = 0.90. The final number of points is 409744.
Figure 7: Importance of matching based on apical angles.
See text for details.
5.3 Saint Martin Square
The images were taken around a fountain located in
the square. This dataset contains 35 images, lead-
ing to 161 pairs. Here we computed only 2 layers
of features. Figure 8 illustrates the results regarding
the point cloud and Figure 6-(b) shows the evolution
of the total number of anchor points for this dataset.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
326

(a) (b)
(c) (d)
(e) (f)
Figure 8: (a) and (b): Two exemplary images taken around
the fountain. (c) and (d): Top view of the area using S
0
and
S
2
. (e) and (f): Close-up on the fountain using S
0
and S
2
.
5.4 Reprojection Error
To evaluate the robustness of the proposed approach,
we computed and compared the mean reprojection er-
ror ¯e for S
0
, S
2
and S
3
. The results are summarized
in Table 2. Comparing ¯e(S
0
) with ¯e(S
2
), it is clear
that our approach reduces ¯e(S
0
) to roughly
1
4
of its
value. When matching based on apical angles is ap-
plied, it further reduces the mean reprojection error
for the Mogao Cave dataset. This shows that our ap-
proach consistently adds points to the point cloud and
improves the initial scene representation.
Table 2: Mean reprojection error ¯e computed for S
0
, S
2
and
S
3
, i.e. before and after applying our guided matching tech-
nique. Values are given in pixels.
Dataset ¯e(S
0
) ¯e(S
2
) ¯e(S
3
)
Mogao Cave 7.51 1.90 1.81
St. Martin Square 4.32 0.97 0.97
6 CONCLUSIONS
This paper presented a method to robustly add 3D
points to sparse point clouds to provide a better repre-
sentation of the underlying scene. We also proposed a
multi-layer feature detection strategy that can be used
with several feature detectors and allows features to
be hierarchically matched. High resolution spherical
images were used as they are more suitable for feature
matching. Moreover, our future work includes the de-
velopment of a dense 3D reconstruction framework
based on this type of images.
ACKNOWLEDGEMENTS
This work was funded partially by the project CAP-
TURE (01IW09001) and partially by the project
DENSITY (01IW12001). The authors would like
to thank Jean-Marc Hengen and Vladimir Hasko for
their technical support.
REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (surf). Comput. Vis. Image
Underst., 110(3):346–359.
Furukawa, Y., Curless, B., Seitz, S. M., and Szeliski, R.
(2010). Towards internet-scale multi-view stereo. In
CVPR.
Hiep, V. H., Keriven, R., Labatut, P., and Pons, J.-P.
(2009). Towards high-resolution large-scale multi-
view stereo. In CVPR, pages 1430–1437. IEEE.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal on Com-
puter Vision, 60:91–110.
Lu, X. and Manduchi, R. (2004). Wide baseline feature
matching using the cross-epipolar ordering constraint.
In CVPR, volume 1, pages 16–23, Los Alamitos, CA,
USA. IEEE Computer Society.
N¨oll, T., K¨ohler, J., Reis, G., and Stricker, D. (2012). High
quality and memory efficient representation for image
based 3d reconstructions. In DICTA, Fremantle, Aus-
tralia. IEEE Xplore.
Pagani, A., Gava, C., Cui, Y., Krolla, B., Hengen, J.-M.,
and Stricker, D. (2011). Dense 3d point cloud gener-
ation from multiple high-resolution spherical images.
In VAST, pages 17–24, Prato, Italy.
Pagani, A. and Stricker, D. (2011). Structure from motion
using full spherical panoramic cameras. In OMNIVIS.
Schwartz, C., Weinmann, M., Ruiters, R., and Klein, R.
(2011). Integrated high-quality acquisition of geom-
etry and appearance for cultural heritage. In VAST,
pages 25–32. Eurographics Association.
Tola, E., Lepetit, V., and Fua, P. (2009). Daisy: An effi-
cient dense descriptor applied to wide baseline stereo.
TPAMI, 99(1).
Triggs, B. (2001). Joint Feature Distributions for Image
Correspondence. In ICCV, volume 2, pages 201–208,
Vancouver, Canada. IEEE Computer Society.
RobustGuidedMatchingandMulti-layerFeatureDetectionAppliedtoHighResolutionSphericalImages
327
