
3D Corner Detection and Matching for Manmade Scene/Object
Structure Cognition
Jiao Tian and Derek Molloy
Centre for Image Processing and Analysis, City University, Dublin, Ireland
Keywords: 3D Corner, Plane Decomposition, Feature Grouping, Structure Cognition.
Abstract: In this paper, we describe a novel framework for 3D corner detection and matching. The proposed method is
based on the assumption that the viewed scene contains definite planar surfaces. The contribution of our
method is the integration of constraints imposed by the existing planes and the local feature matches to
achieve improved plane decomposition and also optimal feature grouping. We describe the foundation of
the framework and show how it can be employed in applications including 3D reconstruction, plane
extraction and robot navigation. The effectiveness of our framework is validated through experimentations
on synthetic 3D object and real architecture images.
1 INTRODUCTION
In 2D images, 3D corners usually have similar visual
patterns as 3-junctions (the number of wedges, such
as T or Y junctions) and they locate on the
intersection region between planes. In existing
junction/corner detection algorithms, none of them
can appropriately tell which particular junction is a
3D corner among the detected junctions. In feature
matching algorithms, 3D corners are often
eliminated from the potential feature sets for
matching because their visual appearances usually
change a lot as the viewpoint shifts. Although the
determination and matching of 3D corners is
difficult, it is still an issue worth investigating as the
3D corners contain extra structure information
which is useful in structure analysis related
problems, such as geometric reasoning in image
spatial layout analysis (Lee et al., 2009), and
structure and motion estimation (Liu et al., 2003) in
image feature based applications.
2 BACKGROUND
Our approach is a joint approach which combines
spatial layout analysis, local feature grouping, and
3D corner detection and matching. In the proposed
approach, these three parts are designed and
expected to complement each other.
2.1 Image Spatial Layout Analysis
The image spatial layout is very useful for many
computer vision tasks, including recognition,
navigation and single view 3D reconstruction, etc.
The determination of the orientation that relates to
different planes of the scene/object is an important
step in spatial layout analysis. In the literature, there
are two branches dealing with this issue: one is
based on a priori learning procedures (Hedau et al.,
2009) or fixed templates about the indoor spatial
layout (Lee et al., 2009); the other is reliant on the
information inferred from local features, such as the
co-planarity (Yu et al., 2008). For the latter
approaches, a batch of features indicating the same
structure information will make the results of spatial
layout analysis more convincing.
2.2 Feature Grouping Methods
Feature grouping/clustering is often related to multi-
model-fitting. Many methods have been proposed
for multi-model-fitting, such as the least square
methods, Hough transform, PEARL (Isack and
Boykov, 2012) and the most standard RANSAC like
algorithms: multi-RANSAC (Zuliani et al., 2005)
and J-linkage (Toldo and Fusiello, 2008). All of
these methods can be used for planar surface
detection. However, when the feature matches are
unevenly distributed on the views of the same scene,
in other words, if there is a dominant plane existing
477
Tian J. and Molloy D..
3D Corner Detection and Matching for Manmade Scene/Object Structure Cognition.
DOI: 10.5220/0004301804770480
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 477-480
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

in the scene, the deduced geometry model will be
inaccurate. For this situation, if the number of
models (rough plane decomposition) is known in
advance, a good result can be achieved.
2.3 Corner/Junction Detection
Usually, corners/junctions are classified by their
visual patterns, i.e. L-Junction, Y-Junction, T-
Junction, Arrow-Junction, and X-Junction. Another
corner categorisation, proposed by Trajkvoc
(Trajkovic and Hedley, 1998), considers only two
separate corner categories - geometric and
texture. Geometric corners belong to the boundaries
of objects in the image, where texture corners come
from the textures of objects in the image. In our case,
the 3D corners are geometric corners which appear
as T or Y junction.
In the literature, only two approaches related to
3D corners are proposed. Liu et al. (Liu et al., 2003)
illustrated an experimental method for the 3D corner
matching based on line matching and geometric
constraints (the edges intersect at one common
point). Ding et al. (Ding et al, 2008) labels an end
point of a line segments as a 3D corner if there are
two sufficiently long lines converging to the other
two vanishing points in a region near this point.
3 OUR APPROACH
The algorithm is as follows:
Algorithm.
1. Image pre-processing to reduce the number of
textured corners while retaining the geometric
corners
2. Junction detection
3. Plane decomposition:
A) Image spatial layout analysis to get a rough
plane decomposition, and a narrowed down search
area for the 3D corner
B) Detect feature matching between views by the
ASIFT feature detection and matching algorithm.
The multi model-fitting algorithm is then used for
planar surface detection based on the obtained
feature matches.
4. Run the ASIFT feature matching algorithm again
on the decomposed plane pairs, and calculate the
homography transformation between the views.
5. 3D corner selection and matching.
5.1. Screen out the 2D 3-junctions by the plane
intersection areas information (calculated in step
3).
5.2. Eliminate the junctions only satisfying one
homography.
3.1 Pre-processing
Trajkovic believes that geometric corners are more
stable than texture corners (Trajkovic and Hedley,
1998), though this claim seems incorrect in recent
feature detection and matching algorithms, such as
SIFT (Lowe,
2004) and MSER (Matas et al., 2002),
his idea about reducing the number of texture
corners while retaining the majority of geometric
corners detected in the image reminds us that a
suitable image smoothing step is necessary to help
remove texture corners before the junction detection
step.
Recently, an effective image smoothing
algorithm, based on L
0
gradient minimisation (Xu et
al., 2011), is proposed for extracting prominent
structures inside images. Their algorithm is
exploited in our image pre-processing step to
remove low-amplitude structures and globally
preserve salient edges. By this means, a considerable
rate of 2D non-geometrical corners will be excluded.
As shown in Figure 1, the detected junction number
is reduced in the smoothed image, particularly on the
right side of the image.
3.2 Junction Detection
We modified the algorithm developed by Rimon
Elias and Robert Laganière (Elias and Laganière,
2012) for junction detection. First, create two binary
edge maps, one thick edge map and one thin edge
map. The thick map is obtained by imposing a
threshold on the gradient magnitude image, and the
thin map is obtained by a non-maxima suppression
process on the thick map. Circular masks are centred
at the potential junction, and the radial lines are
scanned in the masks to determine the presence of
the junctions. Because 3D corners appear as 3-
junctions, we modified the algorithm to only detect
the junctions where three edges meet (Figure 1).
Figure 1: Result of 3-edge junction detection with the
same parameter. (Left) junction detection on the original
image; (Right) junction detection on the smoothed image.
3.3 Plane Decomposition
There are two approaches for plane decomposition
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
478
in our approach. One is based on the analysis of the
line segments/edges in the image. The other is
derived from the point features clustering on
different planar surfaces. The former one is based
the geometric constraints self-contained in the line
segments, i.e. the line segments in the scene can be
grouped into different categories with their
associated vanishing points. The latter one relies on
the assumption that the feature matches clustering on
the same plane will satisfy a planar transformation
(homography) between different views.
3.3.1 Spatial Layout Analysis from Edges
Figure 2 illustrates the steps of the spatial layout
analysis in our approach. Firstly, we detected the
line segments with the Canny edge detector and kept
the line segments with lengths greater than 30 pixels.
Secondly, we used the Vanishing Points detection
algorithm proposed by Hedau et al. (Hedau et al.,
2009), which calculates vanishing points from line
segments and thus grouped the line segments
according to their respective vanishing points. Then,
we simply created an x coordinate range histogram,
which indicates the coordinate range for each group
of the line segments. As shown in Figure 2c, we can
estimate that there are two main consecutive clusters
existing in the group, as well as one consecutive
cluster existing in Figure 2b. Finally, we created a
rough plane decomposition by checking the x-
coordinate ranges of these two line segment groups:
there are three planes in total existing in this view,
the first plane’s x coordinate range is around 0 -100,
the second one’s is 100-400, and the third 450-750.
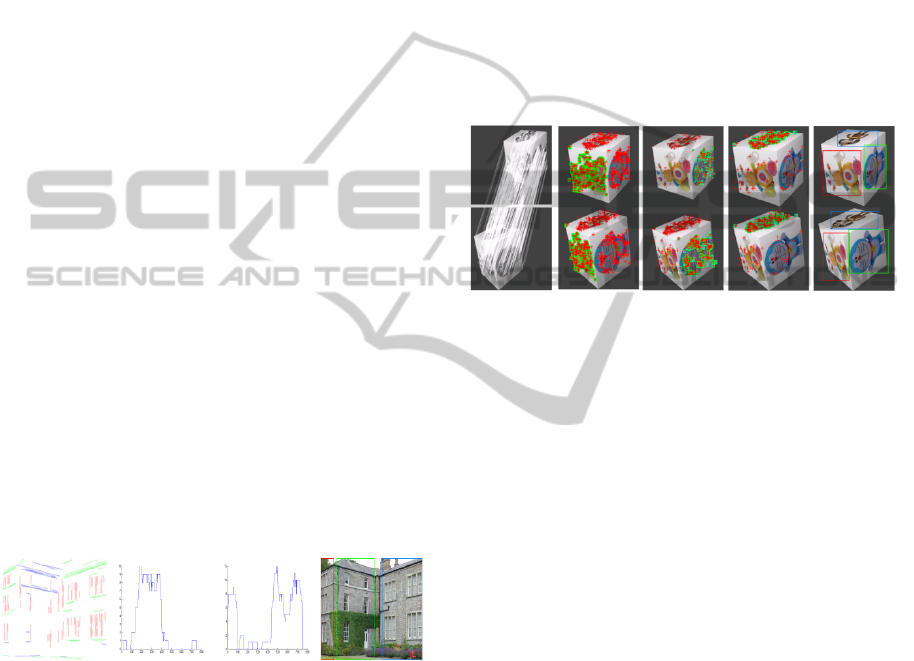
(a) (b) (c) (d)
Figure 2: Spatial analysis results. (a) Grouped line
segments according to their associated vanishing points
represented by three different colours; (b) The x-
coordinate range for the blue line segments; (c) The x-
coordinate range for the green line segments; (d) the rough
plane decomposition.
3.3.2 Planar Cues from ASIFT Matches
In our approach, we chose Affine SIFT (ASFIT)
(Morel, J. M. and Yu. G. S., 2009) for feature
detection and matching, as our approach is targeted
at sparse image sets, where the viewpoint changes
between different views are bigger than usual image
sequences. ASIFT’s accuracy on viewpoint changes
outperforms the other SIFT-based algorithms since
ASIFT is a fully affine invariant method that
simulates all image views obtainable by varying the
two camera axis orientation parameters, namely the
latitude and the longitude angles with SIFT. In other
words, ASIFT simulates three parameters: the scale,
the camera longitude angle and the latitude angle,
and normalises the other three (translation and
rotation) where SIFT only considers the zoom,
rotation and translation.
We found that the features detected by ASIFT
are mainly clustering on the texture abundant areas
of different planes, so, we used the sequential
RANSAC method to group these features with the
different homographies they satisfy (Figure 3).
Figure 3: Plane decomposition from grouping features.
3.4 3D Corner Matching
After the rough plane decomposition, the probable
range of different planes is obtained and the
corresponding plane pairs are indicated by ASIFT
feature matches. Then, we run the ASIFT algorithm
again on these plane pairs and estimated the
associated planar homographies from the ASIFT
feature matches. Since feature match clustering on
the same plane will satisfy a homography
transformation between different views, 3D corners
which locate on the intersection areas of different
planes will satisfy 2 or more such transformations.
At the same time, the 2D junctions can be screened
out in such process (Figure 4).
4 RESULTS OF EXPERIMENTS
We carried out a series of experiments on
synthetically generated images and real architecture
images to test the performance of our approach.
Comparing the junction detection on the original
and the smoothed images, the detected number of 3-
junctions is decreased after image smoothing where
most textured corners are removed (Figure 1).
However, the pre-smoothing will eliminate some
potential geometric corners (3D corners) if the edge
gradient of the 3-junction is small.
3DCornerDetectionandMatchingforManmadeScene/ObjectStructureCognition
479

Following our selection criteria (section 3.4) that 3D
corners which locate on the intersection areas of
different planes will satisfy 2 or more planar
transformations – homographies, 3D corner matches
are found between different views (Figure 4).
As Figure 3 shows, our first plane decomposition
from feature grouping is rough as there are few
feature matches near object boundaries; also, lines
crossing the plane range but not in the plane will
adversely affect the plane range analysis, such as the
lines belonging to the ground floor or lines induced
from the shades. However, with the help of the 3D
corners, an improvement on segmentation is
attainable (Figure 5).
Figure 4: 3D corner matching results.
Figure 5: Plane decomposition results.
Table 1: The total number of good feature matches vs.
total matches on different data sets before and after plane
decomposition.
Data Set
Match no. of whole view
before plane extraction
(Positive / Total)
Match no. of one plane
after plane extraction
(Positive / Total)
630/697
70/84
580/637
50/60
After the rough plane decomposition, we ran ASIFT
again on the cropped plane pair. The number of the
feature matches is increased (Figure 8), the number
of matches on one single plane pair after plane
decomposition is close to the total match number for
the whole scene (Table 1).
5 CONCLUSIONS
We have proposed a framework for 3D corner
detection and matching which combines local
features (ASIFT features) and global geometric
information for plane decomposition and feature
grouping. With the information provided by detected
3D corner matches, the accuracy of the plane
segmentation and feature grouping can be improved.
At this stage, the 3D corner detection and matching
scheme is immature. Sometimes, potential 3D
corners will be eliminated due to one edge having a
low gradient, and the predicted 3D corner locations
obtained by affine homographies associated with
different planes are not precisely the same (meet at
the same location). A possible future work about the
3D corner detection and matching is to separate the
3-junction into several 2-junction, and analysis the
appearance of them and then combine with the self-
contained structure information.
REFERENCES
Lowe D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of
Computer Vision, vol. 60, pp. 91-110.
Ding, M., Lyngbaek, K., and Zakhor, A. (2008).
Automatic registration of aerial imagery with
untextured 3d lidar models. In Proc. of CVPR, pp. 1-8.
Elias, R., and Laganière, R. (2012). JUDOCA: JUnction
Detection Operator Based on Circumferential Anchors.
IEEE Transactions on Image Processing, vol. 21(4),
pp. 2109 – 2118.
Hedau, V., Hoiem, D., and Forsyth, D. (2009). Recovering
the spatial layout of cluttered rooms. In Proc. ICCV,
pp. 1849–1856.
Isack, H. and Boykov, Y. (2012). Energy-based geometric
multi-model fitting. International Journal of
Computer Vision, vol. 97, pp.123–147.
Lee, D., Hebert, M., and Kanade, T. (2009). Geometric
reasoning for single image structure recovery. In
Proc.CVPR, pp. 2136–2143.
Liu, Y., Zhang, X., and Huang, T. (2003). Estimation of
3D structure and motion from image corners. Pattern
Recognition, vol. 36(6), pp.1269 – 1277.
Matas, J., Chum, O., Urban, M. and Pajdla, T. (2002).
Robust wide baseline stereo from maximally stable
extremal regions. In Proc. BMVC, vol. 22, pp. 384-
396.
Morel, J. M. and Yu. G. S. (2009) Asift: A new
framework for fully affine invariant image
comparison. SIAM Journal on Imaging Sciences, vol.
2, pp. 438-469.
Toldo, R. and Fusiello, A. (2008). Robust Multiple
Structure Estimation with J-Linkage. In Proc.ECCV,
vol. pages 537–547.
Trajkovic, M. and Hedley, M. (1998). Fast Corner
Detection. Image and Vision Computing, vol. 16(2),
pp. 75-87.
Xu, L. and Lu, C. W., Xu, Y., and Jia, J.Y. (2011). Image
Smoothing via L0 Gradient Minimization. In Proc.
ACM SIGGRAPH Asia, vol. 30, article No. 174.
Yu, S., Zhang, H., and Malik, J. (2008). Inferring spatial
layout from a single image via depth-ordered
grouping. In CVPR Workshop.
Zuliani, M., Kenney, C. S., and Manjunath, B. S. (2005).
The multiRANSAC algorithm and its application to
detect planar homographies. In Proc. ICIP, vol. 3, pp.
153–156.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
480
