
Integrating Occlusion Culling and Hardware Instancing for Efficient
Real-time Rendering of Building Information Models
Mikael Johansson
Chalmers University of Technology, Gothenburg, Sweden
Keywords: Real Time Rendering, Occlusion Culling, Hardware Instancing, BIM.
Abstract: This paper presents an efficient approach for integrating occlusion culling and hardware instancing. The
work is primarily targeted at Building Information Models (BIM), which typically share characteristics
addressed by these two acceleration techniques separately – high level of occlusion and frequent reuse of
building components. Together, these two acceleration techniques complement each other and allows large
and complex BIMs to be rendered in real-time. Specifically, the proposed method takes advantage of
temporal coherence and uses a lightweight data transfer strategy to provide an efficient hardware instancing
implementation. Compared to only using occlusion culling, additional speedups of 1.25x-1.7x is achieved
for rendering large BIMs received from real-world projects. These speedups are measured in viewpoints that
represents the worst case scenarios in terms of rendering performance when only occlusion culling is
utilized.
1 INTRODUCTION
With the creation of Building Information Models
(BIM), the content produced by architects and
designers has evolved from traditional 2D-drawings
to semantically-rich, object-oriented 3D-models.
With all of the data available in 3D, this concept
further facilitates the use of real-time visualizations
in various contexts. However, as primarily created to
describe a complete building in detail, many 3D
datasets extracted from BIMs provides a challenge
to manage in real-time without additional
acceleration techniques (Steel et al., 2012).
In this context, occlusion culling has been shown
to provide a suitable option (Johansson and Roupé,
2012). Given that typical building models naturally
exhibit a lot of occlusion this is an efficient approach
to increase rendering performance for many
viewpoints. Still, for viewpoints where many objects
are, in fact, visible, occlusion culling alone may not
always be able to provide sufficiently high frame
rates. Common examples include exterior views of
whole building facades where the sheer number of
draw calls, and hence CPU burden, easily becomes
the limiting factor in terms of rendering performance
(Wloka, 2003).
Another characteristic of typical BIMs is the
frequent reuse of identical building components. As
similarity tends to reduce design, production and
maintenance costs, use of multiple identical
components, such as doors and windows, is common
in any building (Sacks et al., 2004). For viewpoints
where many objects are visible it is therefore a high
probability that many of these objects are identical,
albeit placed at different locations. One way to take
advantage of this is to utilize the hardware
instancing functionality of modern GPUs. With
hardware instancing it is possible to render multiple
copies of the same geometry with a single draw call,
thereby reducing CPU-burden for scenes with much
repetition. However, even if the reduction of draw
calls improves performance in CPU-limited
scenarios, the GPU still has to process all the
instantiated geometry. As such, culling of invisible
instances is still important to reduce overall
workload
This paper presents a method to integrate
occlusion culling and hardware instancing in order
to provide efficient real-time rendering of large
BIMs. By using an efficient occlusion culling
algorithm hardware instancing can be restricted to
visible replicated objects only. For viewpoints when
many objects are visible, hardware instancing
complements the occlusion culling by providing an
efficient rendering path for visible replicated objects.
The key component to realize this is an efficient
197
Johansson M..
Integrating Occlusion Culling and Hardware Instancing for Efficient Real-time Rendering of Building Information Models.
DOI: 10.5220/0004302801970206
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 197-206
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

dynamic hardware instancing implementation that
takes advantage of temporal coherence and uses a
lightweight data transfer strategy.
2 RELATED WORK
2.1 Occlusion Culling
With occlusion culling the aim is to identify and
reject occluded regions of 3D scenes in order to
improve rendering performance. Within this
category of acceleration techniques a vast amount of
research has been conducted and for a general
overview interested readers are referred to the
surveys provided by (Cohen-Or et al, 2003) and
(Bittner and Wonka, 2003). In essence, available
algorithms can be classified according to whether
they require time-consuming offline computations or
not.
When considering online approaches, which
require no pre-computations, the support for
hardware accelerated occlusion queries has provided
a simple mechanism to detect visibility. With
hardware occlusion queries the GPU returns the
number of pixels that passes the depth test when
rasterizing a given object. This way, proxy
geometries can be used to detect occlusion before
the actual object is rendered. However, due to the
delayed processing in the graphics pipeline the result
of the query is not immediately available on the
CPU which makes an efficient implementation more
complex. This problem was addressed with the
Coherent Hierarchical Culling (CHC) algorithm,
which exploits spatial and temporal coherence in
order to reduce latency and overhead of the queries
(Bittner et al., 2004). However, although the CHC
algorithm works well in highly occluded scenes,
wasted queries and unnecessary state changes makes
it less reliable for viewpoints when many objects are
visible. In order to reduce the number of wasted
queries, (Guthe et al., 2006) proposed a method,
called Near Optimal Hierarchical Culling (NOHC),
based on a statistical model for occlusion probability
and a hardware calibration step. Assuming proper
hardware calibration their approach always performs
better than view-frustum culling. In (Mattausch et
al., 2008) an improved version of the CHC
algorithm, called CHC++ was presented. Although
the core ideas of the algorithm remain the same, the
additional components introduced by CHC++
provide a significant improvement in rendering
speed compared to both NOHC and CHC. Mainly,
this was achieved by introducing batching of queries
as a means to reduce costly state changes.
When considering the case of rendering complex
BIMs, the efficiency of the CHC++ algorithm has
been recently demonstrated (Johansson and Roupé,
2012). Compared to view-frustum culling, CHC++
provided significant speedups for a number of fairly
large BIMs during both interior and exterior
viewpoints.
As an alternative to occlusion queries, (Hill and
Collin, 2011) recently proposed a modern variant of
the hierarchical z-buffer (Green et al., 1993), where
all visibility tests are performed on the GPU. The
state of visibility is then read-back to the CPU, so
that un-occluded objects can be rendered in a single
stage. However, although reported as being
successfully used in recent computer games, the
performance implications are still largely unknown
for general 3D models. In addition, this approach
requires a set of good occluders in order to initiate
the z-buffer.
A problem common to practically all visibility
culling methods is that of granularity. On the one
hand, in order to maximize culling efficiency, we
ideally want to perform visibility determination on
the level of granularity provided by the individual
objects contained in a 3D scene. On the other hand,
for viewpoints with many visible objects, this is not
an optimal organization of the 3D scene, considering
the aim of keeping a low draw call count (Wloka,
2003). In this case, reduction of draw calls can often
be addressed by geometry batching, where spatially
coherent objects (with similar material properties)
are combined into larger ones during a pre-process
(Buchholz and Döllner, 2005). However, even if this
process enhance rendering performance for certain
viewpoints, it potentially reduces culling efficiency,
and hence, performance, for other viewpoints.
Besides requiring a dedicated pre-process, geometry
batching also complicates the use of additional
acceleration techniques applied per-object, such as
level-of-detail (LOD).
The proposed method addresses this situation by
performing implicit geometry batching. By taking
advantage of hardware instancing capabilities of
modern GPUs, culling can be performed at fine
granularity at the same time as the amount of draw
calls is reduced for viewpoints with many visible
objects.
2.2 Hardware Instancing
For 3D scenes where many individual objects have
to be rendered it is not uncommon that the large
number of draw calls (and related state changes and
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
198

buffer binds) becomes the limiting factor in terms of
performance (Wloka, 2003). Given a large amount
of replicated geometry, hardware instancing is one
way to address this problem. The idea behind this
concept is to use a single draw call when rendering
multiple copies of the same geometry. By using a
previously uploaded buffer or texture object
containing per-instance data (i.e. transformation
matrix), each instance can then be transformed to its
correct location on the GPU. Typical applications
that can benefit from hardware instancing include
rendering of crowds and vegetation, which usually
require a large number of instances at the same time
as there exists much repetition. In (Park et al., 2009),
(Dudash, 2007), and later (Ramos et al., 2012),
examples on how to render several thousands of
animated characters in real-time with the use of
hardware instancing is presented. Recently, (Bao et
al., 2012) presented a GPU-driven framework for
rendering large forests. Hardware instancing,
together with level-of-detail selection on the GPU,
allow them to render several thousands of detailed
trees, with shadows, in real-time.
However, even if hardware instancing reduces
the number of draw calls, and hence CPU-burden,
the GPU still have to process all the geometry that is
instantiated. Without any type of visibility culling,
this may lead to unnecessary high GPU-burden for
3D scenes with many instances. In order to limit the
number of instances, (Park et al., 2009) and (Bao et
al., 2012) perform view-frustum culling on the GPU.
Still, for highly occluded scenes, such as
Building Information Models, view-frustum culling
only allows a subset of the invisible geometry to be
rejected. The proposed method addresses this
problem by an efficient dynamic hardware
instancing implementation. By taking advantage of
temporal coherence together with a lightweight data
transfer approach, occlusion culling can be
performed at object level at the same time as
replicated geometry is efficiently rendered using
hardware instancing.
3 THE IFC BUILDING MODEL
For the majority of BIM authoring tools the
underlying data-model closely resembles that of the
Industry Foundation Classes (Eastman et al., 2011).
Instead of pure geometrical entities, this scheme
represents a building or facility in terms of its
individual building components, such as walls,
doors, windows and floors. For each component a
visual representation is then provided in the form of
one or several geometrical entities (i.e. triangular
meshes). When considering instancing, this concept
is performed at the building component level. As an
example, all instances of a specific window type will
be considered a unique building component but
share the same visual representation. For the
implementation and tests presented in this paper, no
additional processing of the input 3D-data has been
performed except organizing it in a bounding
volume hierarchy. In this hierarchy, leaf nodes
represent the individual building components. As
such, culling is performed at a granularity
corresponding to the individual building
components. However, hardware instancing is
performed at a level corresponding to the
geometrical entities that represent each component.
For the rest of this paper replicated components
that are suitable for hardware instancing are referred
to as instanceable. The specific geometry being
instanced is referred to as the geometry reference.
4 ALGORITHM OUTLINE
The proposed method consists of three main steps.
In order to give an overview of the algorithm all
three steps are briefly discussed below.
Determine Visible Instances. Using an efficient
occlusion culling system, we inherently have access
to the set of potentially visible objects in a certain
frame. Based on the assumption that hardware
instancing is the most efficient way to render
multiple copies of the same geometry, this set is
searched for replicated components. These objects
are then scheduled for rendering with hardware
instancing in the next frame.
Upload Required Data to GPU. Given a set of
visible objects to be rendered using hardware
instancing, per-instance data need to be uploaded to
the GPU. To reduce per-frame data transfer, an
indexed approach is used: During scene loading,
transformation matrices for all potential instances
are uploaded to the GPU. During rendering, only a
single index per instance needs to be transferred in
order to locate the corresponding transformation
matrix in GPU memory. Thus, at the end of each
frame, data in the form of indices is uploaded to the
GPU for processing during the next frame.
Render using Hardware Instancing. At the
beginning of each frame opaque instances collected
during the previous frame are rendered using
hardware instancing. However, for semi-transparent
geometry hardware instancing introduces
IntegratingOcclusionCullingandHardwareInstancingforEfficientReal-timeRenderingofBuildingInformationModels
199

complexities. As correct depth ordering no longer
can be maintained, an order-independent
transparency rendering technique (Everitt, 2001) is
needed to support hardware instancing of semi-
transparent geometry.
5 INTEGRATING OCCLUSION
CULLING AND HARDWARE
INSTANCING
As outlined, the general idea behind the proposed
method is to dynamically select candidates for
hardware instancing, based on visibility knowledge
provided by the occlusion culling system. For the
purpose of this, any efficient occlusion culling
algorithm can be used as long as it provides
visibility classification for all objects in a scene. For
the implementation and tests presented in this paper
the latest version of the Coherent Hierarchical
Culling algorithm, CHC++ has been used. This
choice is based on the simplicity of the algorithm
and the fact that it has already been proven to work
well when applied to large Building Information
Models. As such, it provides a good basis for further
enhancements. In the followings subsections the
details of the algorithm is presented, starting with a
review of the hardware instancing API together with
important aspects of the CHC++ algorithm.
5.1 Hardware Instancing API
Taking OpenGL as an example, the instancing API
extends the conventional draw call by exposing the
option to specify the number of times a particular
batch of geometry should be rendered. In the vertex
shader an internal counter (gl_InstanceID) is then
accessible which advances for each iteration. Using
the internal counter as an index, the per-instance
transformation matrix can then be sourced from any
type of previously uploaded array, texture or buffer
object. However, the arrangement of per-instance
data must reflect the fact that the internal counter
advances with a fixed step. In order to render a
specific set of instances with a single draw call, the
per-instance data must be arranged sequentially.
5.2 CHC++
The original CHC algorithm takes advantage of
spatial and temporal coherence in order to provide
efficient scheduling of hardware occlusion queries.
The state of visibility from the previous frame is
used to initiate queries in the current frame
(temporal coherence) and by organizing the scene in
a hierarchical structure (i.e. bounding volume
hierarchy) it is possible to test entire branches of the
scene with a single query (spatial coherence). While
traversing a scene in a front-to-back order, queries
are only issued for previously invisible interior
nodes and for previously visible leaf nodes of the
hierarchy. The state of visibility for previously
visible leaves is only updated for the next frame and
they are therefore rendered immediately (without
waiting for the query results to return). The state of
visibility for previously invisible interior nodes is
important for the current frame and they are not
further traversed until the query results return. By
interleaving the rendering of (previously) visible
objects with the issuing of queries, the algorithm
reduces idle time due to waiting for queries to
return.
Although the core ideas remain the same,
CHC++ introduced several optimizations which
make it perform very well even in situations with
low occlusion. Most notably, the improved version
addressed the problem of redundant state changes
due to the interleaved rendering and querying.
Instead of directly querying a node, it is appended to
a queue. When this queue reaches a certain size, the
rendering state is changed to querying and an
occlusion query is issued for each node in the queue.
In addition, this mechanism allows an application to
perform material sorting before rendering visible
objects in order to reduce costly API calls.
In order to reduce the number of queries, the
original CHC algorithm introduced an important
optimization based on temporal coherence - A
visible object is assumed to stay visible and will
only be tested for visibility again after a user-
specified amount of frames (typically 10-20). This
optimization, together with the assumption that
hardware instancing is the most efficient way to
render multiple copies of the same geometry, is the
entry-point for the proposed method. When an
object suitable for instancing is found visible, it is
scheduled to be rendered using hardware instancing
in the following frame.
5.3 Data Preparation
In a static situation, where the same set of instances
should be rendered every frame, per-instance data
can be uploaded to GPU-memory once, and then,
during subsequent draw calls, be fetched in the
vertex shader based on the value of the internal
instance counter. In the proposed approach,
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
200
however, a dynamic behaviour is needed in order to
support per-frame selection of which geometry to
render using hardware instancing. As per-instance
data needs to be arranged sequentially in order to
facilitate a single draw call per geometry reference,
this require complete or partial updates of the shared
buffer or texture every frame. In order to optimize
this process an indexed approach is used, as
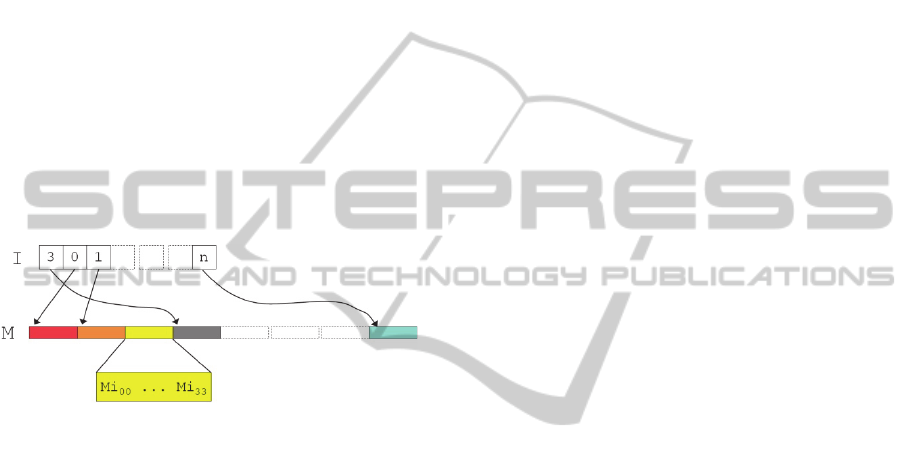
explained visually in Figure 1. During scene loading,
transformation matrices for all instanceable objects
are collected and placed in a single array, denoted
M. The location of each instance’s transformation
matrix within this array is recorded for later use.
During rendering, a single index is then needed to
locate each instance’s transformation matrix within
M. For a 4x4 transformation matrix, this approach
effectively reduces the required data transfer by a
factor of 16. Both the index array (I) and matrix
array (M) are implemented as a Texture Buffer
Objects.
Figure 1: An array of indices (I) is used to locate each
instance’s transformation matrix, encoded in a single,
shared array (M).
5.4 Collecting Visible Instances
Depending on the occlusion culling algorithm of
use, the state of visibility for objects in a scene
might be known at different stages. For instance, the
GPU-based implementation of the Hierarchical Z
Buffer proposed by (Hill, 2011), resolves visibility
for all objects in a single phase in the beginning of a
frame. The CHC++ algorithm, on the other hand,
distributes this process by interleaving the rendering
of objects with the issuing of queries, effectively
delaying the complete visibility knowledge of a
scene towards the end of the frame. In order to cope
with different implementations and to provide
additional time for the required data transfer, the
rendering of instanceable geometry is deferred by
one frame. Thus, an object detected visible in frame
n will be scheduled for rendering using hardware
instancing in frame n+1. Figure 2 presents the
modifications to the original CHC++ algorithm that
is needed in order to implement this behavior. When
a node of the spatial hierarchy is found visible, the
TraverseNode function is called for its children (For
a complete picture of the algorithm the reader is
referred to the original CHC++ paper). During
traversal of an instanceable leaf node the algorithm
first checks if it is scheduled for rendering using
hardware instancing in the current frame. If this is
not the case it is rendered in a conventional way by
adding it to a render queue. In a second step, it is
scheduled for rendering using hardware instancing
in the next frame.
TraverseNode(N) {
if isLeaf(N) {
+ if isInstanceable(N) {
+ if N.nextInstFrameId != frameId {
+ Render(N);
+ }
+ EnqueueForInstInNextFrame(N);
+ N.nextInstFrameId = frameId + 1;
+ }
+ else {
Render(N);
+ }
}
else {
DistanceQueue.PushChildren(N);
N.IsVisible = false;
}
};
Figure 2: Pseudo-code for the collection of visible
instances. Difference to the CHC++ algorithm is marked
in blue.
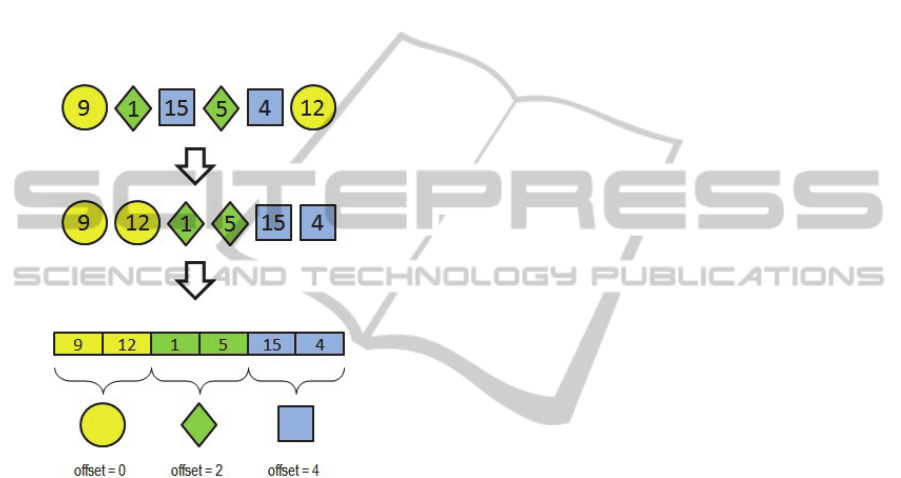
5.5 Data Transfer
At the end of frame n, a set of objects suitable for
rendering using hardware instancing in frame n+1
has been collected. As illustrated in Figure 3, this set
is sorted by geometry reference to generate a single
array of indices (I) to upload to GPU memory. Thus,
for m unique geometry references the array will
contain m regions of indices. Within each region, the
array is populated with indices corresponding to the
location of each instance’s transformation matrix in
M. While generating the array the offset to each
specific region is also recorded. This offset is needed
during rendering in order to use a single indices
array for all geometry references (Section 5.6).
During this stage, before the actual upload, the
minimum number of instances per geometry
reference is also considered. Geometry rendered
with hardware instancing uses a more complex
vertex shader and require additional data transfer,
which itself introduce a performance penalty. In
order to gain an increase in performance the
reduction of draw calls must reflect this. If the
IntegratingOcclusionCullingandHardwareInstancingforEfficientReal-timeRenderingofBuildingInformationModels
201
number of collected instances per geometry
reference is below a user-defined parameter, NImin,
they are not scheduled for instancing in the next
frame. Instead the parameter nextInstFrameId
(Figure 2) is set to zero on the corresponding objects
in order to render them using a non-instanced
approach in the next frame. For the different BIMs
evaluated in this paper (Section 6), empirical tests
have shown that a minimum requirement of three (3)
instances per geometry reference is a suitable
choice. However, ultimately, this parameter should
be set per geometry reference, taking number of
triangles into account.
Figure 3: Collected instances (top) are sorted by geometry
reference (middle) to generate the final index array and
corresponding offsets (bottom). The numbers (indices)
corresponds to the location of each instance’s
transformation matrix in M.
5.6 Rendering
As based on hardware occlusion queries, the CHC++
algorithm requires that visible objects are rendered
before occluded ones in order to properly detect
occlusion. Thus, in order to preserve the state of
visibility, opaque instances are rendered using
hardware instancing in a single single step at the
beginning of each frame. However, if the visibility
determination system is separated from the
conventional rendering, this step can be performed
at a later stage.
The actual rendering of all collected instances is
performed by a single draw call per geometry
reference. During this stage, the transformation
matrix array (M) and indices array (I) are bound to
the context. In Figure 4, GLSL code fragments from
the vertex shader are shown. Here, the internal
counter (gl_InstanceID) is used to fetch the current
index from the indices array (I). This index is then
used to locate the correct transformation matrix in
the transformation matrix array (M). However, when
invoking an instanced draw call, the internal counter
will start its iteration from zero (0). As a single array
is used for all indices an offset is required to define
which region to fetch values from. This offset is
recorded during the actual forming of the global
indices array (Section 5.5), and during rendering it is
supplied as a uniform per geometry reference.
uniform samplerBuffer M; //Matrices
uniform samplerBuffer I; //Indices
uniform int _offset;
void main()
{
//Fetch index by offset
int id = gl_InstanceID + _offset;
int idx =
int(texelFetchBuffer(I,id).x);
mat4 OT =
mat4(texelFetchBuffer(M,idx*4),
texelFetchBuffer(M,idx*4+1),
texelFetchBuffer(M,idx*4+2),
texelFetchBuffer(M,idx*4+3));
gl_Position =
gl_ModelViewProjectionMatrix *
OT * gl_Vertex;
//-------------------------------
//Other per-vertex calculations.
//-------------------------------
};
Figure 4: Vertex shader used for the instanced rendering
path (GLSL-code).
5.6.1 Semi-transparent Geometry
Using conventional methods, semi-transparent
geometry is rendered after opaque objects, in a back-
to-front order, using alpha blending (Akenine-
Möller et al., 2008). With hardware instancing
correct order among transparent objects can no
longer be preserved and, consequently, an order-
independent transparency rendering technique is
needed. A common technique within this category of
algorithms is depth peeling (Bavoil, 2008), where
transparent fragments are sorted by rendering the
geometry several times, peeling off one transparent
layer at a time. However, although accurate, the
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
202
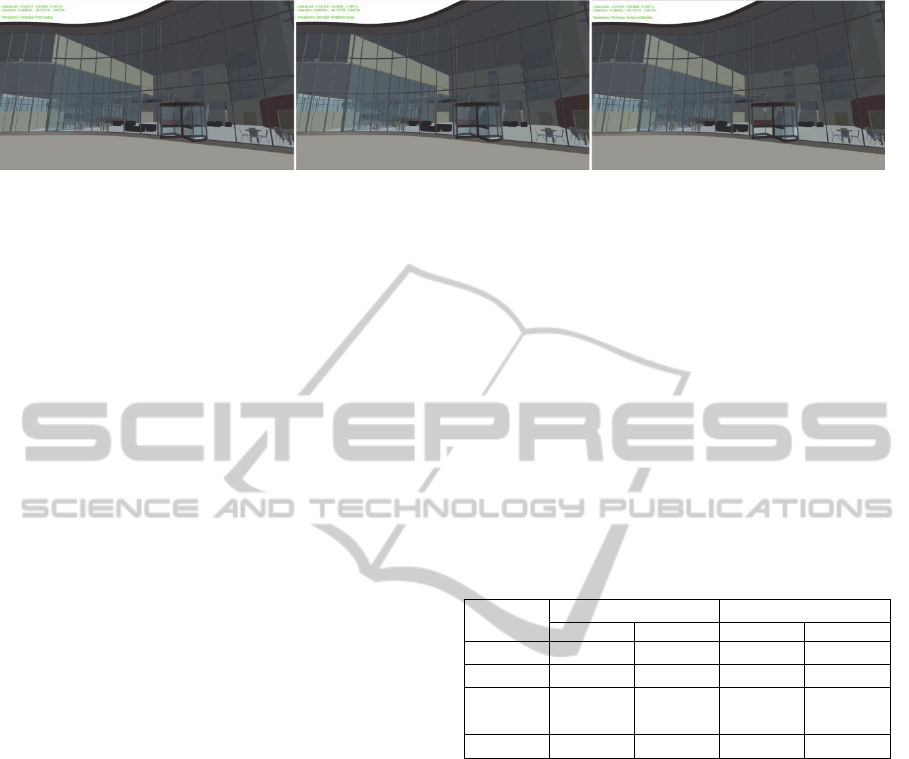
Figure 5: Transparency rendering modes: Depth peeling (left), Weighted average (middle) and sorted by object (right).
performance penalty of depth peeling is rather high
which makes it unsuitable in practice. As a
performance efficient alternative, a single pass
approximation of depth peeling is suggested in
(Bavoil, 2008). The technique, referred to as
weighted average transparency, calculates the final
color as the alpha-weighted sum of colors divided by
the average alpha. When blending pixels of equal
color and transparency, this technique produces
correct results. However, when colors and
transparency values differ too much, the result of the
weighted average technique starts to deviate in terms
of correctness compared to depth peeling. Still,
despite being an approximation, it works very well
for typical building models. As the use of
transparency and color for windows and glazed
structures is usually coherent within a building, the
technique produces plausible results. Even in
situations when many transparent layers are visible,
the difference between the correct and the
approximate method is hard to detect, as seen in
Figure 5.
In the proposed method, both instanced and non-
instanced semi-transparent geometry are rendered in
a final stage each frame. For the implementation and
tests the weighted average transparency technique
has been primarily used. However, in the results
section, the findings in terms of performance for the
depth peeling approach are also reported.
6 RESULTS
The proposed method has been tested on four
different Building Information Models. The models
were created in Autodesk Revit 2012, and all four
represents planned or existing buildings (see Table 2
and 3 for detailed information). For all of the tests an
Intel Core i7 3.07 GHz CPU and an Nvidia GeForce
570 GTX graphics card was used. The CHC++
occlusion culling algorithm was used together with a
bounding volume hierarchy built according to the
surface area heuristics (Macdonald, 1990), and the
screen resolution was set to 1280 x 720. Unless
otherwise stated, the following parameters were
used: maximum triangle count for instancing
Tmax=3000, assumed visible frames Nav=20,
minimum number of instances NImin=3. The
weighted average technique (WA) was used for
rendering semi-transparent geometry when hardware
instancing (HI) was activated. Without instancing
activated semi-transparent geometry was rendered
using a conventional sort-by-object approach
(SORT). However, for the Hotel model the
performance numbers with depth peeling (DP) is
also presented.
Table 1: Frame times (in ms) for view-frustum culling
(VFC) and occlusion culling (CHC++) for one exterior
and one interior viewpoint for each of the four test models.
Scene
INTERIOR EXTERIOR
VFC CHC++ VFC CHC++
Library 13.1 1.9 17.2 7.5
Hospital 26.6 1.1 37.8 18.8
Student
Housing
40.1 1.2 68.2 11.3
Hotel 56.3 1.4 130.2 47.8
The CHC++ algorithm has previously been
found to perform very well compared to only using
view frustum culling for typical BIMs. These
findings were confirmed for all of the test-models.
Table 1 presents a comparison of frame times for
one interior (highly occluded) and one exterior
(same as seen in the screenshots in Table 2 and 3)
viewpoint for each of the four models. As can be
seen, the CHC++ algorithm provides a significant
speedup, especially for the interior viewpoints.
Given this, subsequent tests were focused on the
worst case scenarios provided by the test models -
viewpoints when many objects are visible. In such
situations the sheer number of objects that has to be
rendered becomes the limiting factor in terms of
performance. For all test models these scenarios
were found in exterior viewpoints and a set of
camera paths were constructed accordingly. These
walkthroughs represents the worst case scenarios in
terms of rendering performance when only occlusion
culling was enabled. Table 2 (left) presents the
IntegratingOcclusionCullingandHardwareInstancingforEfficientReal-timeRenderingofBuildingInformationModels
203
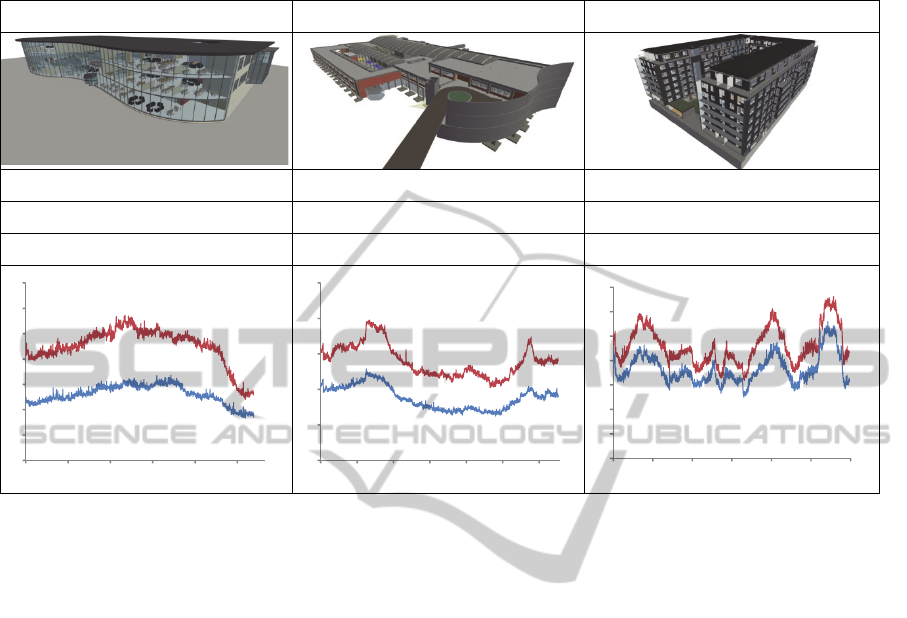
Table 2: Statistics for three of the test models and frame times for the proposed approach with occlusion culling (CHC++),
hardware instancing (HI) and weighted average transparency (WA) compared to occlusion culling (CHC++) and
conventional sort-by-object transparency (SORT) for the predefined walkthroughs.
LIBRARY HOSPITAL STUDENT HOUSING
3,291,869 triangles 1,561,972 triangles 10,857,175 triangles
7,312 objects 18,530 objects 17,666 objects
11,195 geometry batches 22,265 geometry batches 33,455 geometry batches
frame times with and without hardware instancing
enabled for the Library model. This model features a
large glazing façade and consequently, many interior
objects are visible at the same time when viewed
from the outside. Here, the camera path provides an
orbital camera movement from one side of the
building to the other, while facing the center of the
building. Compared to only using occlusion culling,
the proposed method provides an average speed-up
of 1.7x during this walkthrough. For the Hotel
model the results are similar (Table 3). However, in
this case the number of visible objects is mainly a
result of a vast façade composed by many replicated
windows, curtain wall elements and façade stones.
The walkthrough sequence is similar as for the
Library model, however, in the end interior, more
occluded regions of the building are also visited.
During these viewpoints the number of visible
instanceable objects is low and, hence, few or none
of them are rendered using hardware instancing.
Still, in such viewpoints the occlusion culling
system alone is able to deliver high performance and
the important thing to note is that the proposed
method only introduces a slight overhead, noticeable
only in terms of relative numbers. For the non-
interior parts of the walkthrough sequence an
average speed-up of 1.7x was achieved with
hardware instancing.
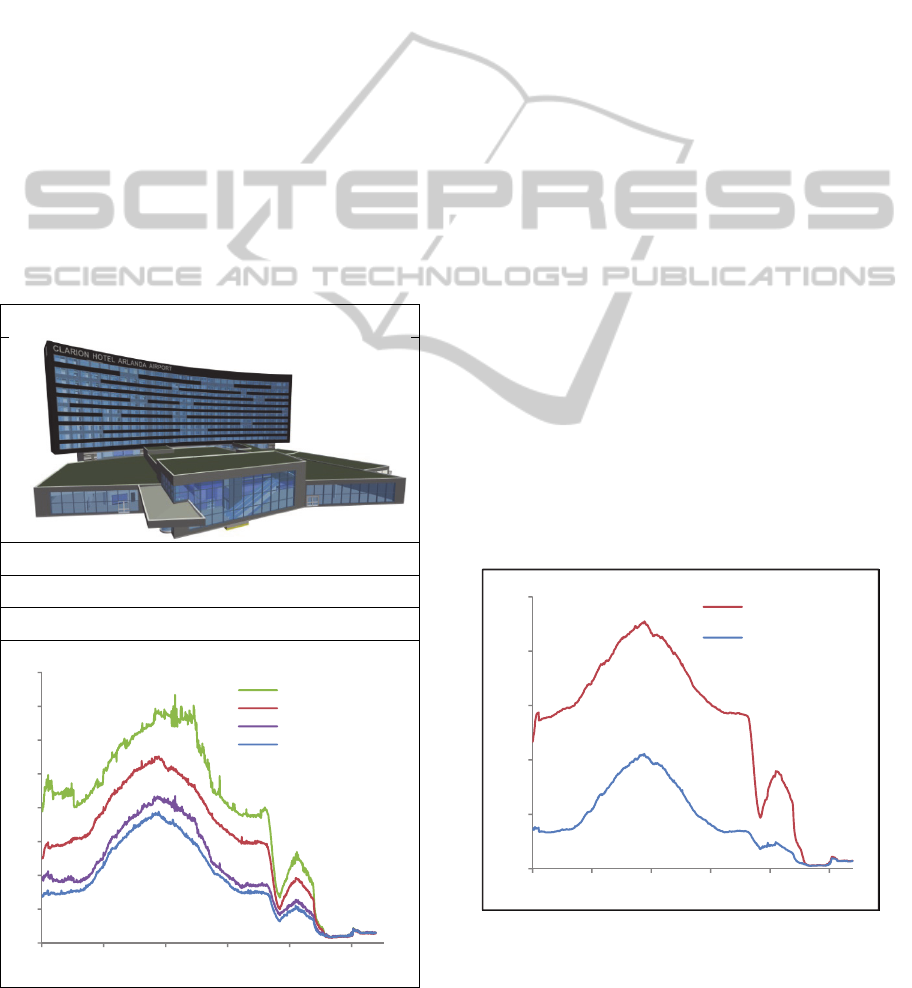
Table 3 also presents the performance results
with depth peeling (DP). This approach guarantees a
correct results but the performance penalty is higher
compared to the weighted average technique.
Nevertheless, compared to conventional sorting
(SORT) a 1.5x speed-up was still achieved with
instancing. On the other hand, when depth peeling
was used in both cases (instanced and non-
instanced) the average speed-up was almost 2x.
Figure 6 presents the number of draw calls with
and without hardware instancing enabled for the
Hotel model. This plot reveals the source of the
performance gain. As can be seen, the numbers of
draw calls are greatly reduced and, as a
consequence, the performance is increased.
Table 2 also presents the performance numbers
for the Hospital (middle) and Student Housing
model (right). For the Hospital model an average
speed-up of 1.6x is achieved with instancing. For the
Student Housing model the performance gain of the
proposed method is more moderate. Although an
average speed-up of 1.25x is achieved, it is less than
expected considering the model still has a fairly
large amount of replicated components. However,
compared to the other models, the animation
sequence for the Student Housing model does not
feature viewpoints equally beneficial in terms of
instancing. First, the relative amount of visible
0
2
4
6
8
10
12
14
1 301 601 901 1201 1501
CHC++ | SORT
CHC++ | HI | WA
TIME (ms)
FRAMES
0
5
10
15
20
25
1 301 601 901 1201 1501 1801
CHC++ | SORT
CHC++ | HI | WA
TIME (ms)
FRAMES
0
2
4
6
8
10
12
14
1 501 1001 1501 2001 2501
CHC++ | SORT
CHC++ | HI | WA
TIME (ms)
FRAMES
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
204
replicated geometry is not as high and, second, the
number of different geometry references is higher.
7 CONCLUSIONS
This paper has presented a simple, yet efficient
approach for integrating occlusion culling and
hardware instancing. Compared to only using
occlusion culling, average speed-ups of 1.25x – 1.7x
were achieved for all test models in viewpoints
where many objects are visible. Without dynamic
hardware instancing activated, these viewpoints
represents the
worst case scenarios in terms of
rendering performance.
Table 3: Statistics for the Hotel model and frame times for
the proposed approach with occlusion culling (CHC++),
hardware instancing (HI) and weighted average
transparency (WA) compared to occlusion culling
(CHC++) and conventional sort-by-object transparency
(SORT) for the predefined walkthrough. In addition, the
frame times for depth peeling (DP) are presented.
HOTEL
6,176,072 triangles
41,899 objects
62,624 geometry batches
The only aspect to consider a limitation is the
requirement of an order-independent transparency
rendering technique for semi-transparent geometry.
A simple solution to remove this restriction would
be to skip the use of hardware instancing for
transparent geometry. Still, such geometry often
possesses characteristics suitable for hardware
instancing, which makes them tempting to include.
For the tested models the weighted average
technique was found to provide plausible results
with high performance. In addition, depth peeling
was shown to provide a viable option if a fully
correct result is important.
For future work it would be interesting to test the
proposed method together with other occlusion
culling algorithms. The CHC++, although efficient,
tightly integrates visibility determination and actual
rendering of geometry. This puts restrictions on
when collection, upload and rendering of instanced
geometry can be performed. If these restrictions
were relaxed, it is possible that a more efficient
implementation of hardware instancing could be
achieved.
Another area of further investigations would be
the parameters NImin (minimum number of
instances per geometry reference) and Tmax
(maximum number of triangles for instanced
geometries) for different scenes and hardware
setups. Although the results show that uniform
values for these parameters works in practice, it is
likely that the performance could be further
enhanced by letting NImin depend on triangle count
(i.e. demanding a higher instance count for
geometries with many triangles).
Figure 6: Number of draw calls with and without hardware
instancing for the Hotel model.
0
10
20
30
40
50
60
70
80
1 201 401 601 801 1001
TIME (ms)
FRAMES
CHC++ | DP
CHC++ | SORT
CHC++ | HI | DP
CHC++ | HI | WA
0
5000
10000
15000
20000
25000
1 201 401 601 801 1001
CHC++ | SORT
CHC++ | HI | WA
FRAMES
NUM. DRAW CALLS
IntegratingOcclusionCullingandHardwareInstancingforEfficientReal-timeRenderingofBuildingInformationModels
205

REFERENCES
Akenine-Möller, T., Haines, E., Hoffman, N. (2008). Real-
Time Rendering 3rd Edition. A. K. Peters, Ltd.,
Natick, MA, USA.
Bao, G., Li, H., Zhang, X., Dong, W. (2012). Large-scale
forest rendering: Real-time, realistic, and progressive.
Computers & Graphics, Vol. 36, Issue 3, Pages 140-
151.
Bavoil, L., Myers, K. (2008). Order Independent
Transparency with Dual Depth Peeling. Tech. rep.,
NVIDIA Corporation.
Bittner, J., Wimmer, M., Piringer, H., Purgathofer,
W.(2004). Coherent Hierarchical Culling: Hardware
Occlusion Queries Made Useful. Computer Graphics
Forum 23, 3, pages 615–624.
Bittner, J., Wonka, P. (2003). Visibility in Computer
Graphics. Environment and Planning B: Planning and
Design 30, 5, pages 729–756.
Buchholz, H., Döllner, J. (2005). View-Dependent
Rendering of Multiresolution Texture-Atlases.
Proceedings of the IEEE Visualization 2005,
Minneapolis, USA.
Cohen-Or, D., Chrysanthou, Y. L., Silva, C. T., Durand F.
(2003). A Survey of Visibility for Walkthrough
Applications. In IEEE Transactions on Visualization
and Computer Graphics 09, 3, pages 412–431.
Dudash, B. (2007). Animated crowd rendering. In GPU
Gems 3. Addison-Wesley, pages 39–52.
Eastman, C., Teicholz, P., Sacks, R., Liston, K. (2011)
BIM Handbook (2nd Edition) A guide to building
information modeling for owners, managers,
designers, engineers and contractors, John Wiley &
Sons, New Jersey.
Everitt, C. (2001). Interactive Order-Independent
Transparency. Tech. rep., NVIDIA Corporation.
Greene, N., Kass, M., Miller, G. (1993). Hierarchical
ZBuffer Visibility. In SIGGRAPH ’93, pages 231–238.
Guthe, M., Balazs, A., Klein, R. (2006). Near Optimal
Hierarchical Culling: Performance Driven Use of
Hardware Occlusion Queries. In Eurographics
Symposium on Rendering 2006.
Hill, S., Collin, D. (2011). Practical, Dynamic Visibility
for Games. In Gpu Pro 2.
Johansson, M., Roupé, M. (2012). Real-Time Rendering
of large Building Information Models. In proceedings
of CAADRIA 2012 - Beyond Codes & Pixels, pages
647-656.
Macdonald, J. D., Booth, K. S. (1990). Heuristics for ray
tracing using space subdivision. Visual Computer 6, 6,
pages 153–65.
Mattausch, O., Bittner, J., Wimmer, M. (2008). CHC++:
Coherent Hierarchical Culling Revisited. Computer
Graphics Forum (Proceedings Eurographics 2008)
27, 2, pages 221–230.
Park, H., Han, J. (2009). Fast Rendering of Large Crowds
Using GPU. In Entertainment Computing - ICEC 2008
(Lecture Notes in Computer Science, 5309), pages
197-202.
Ramos, F., Ripolles, O., Chover, M. (2012). Continuous
Level of Detail for Large Scale Rendering of 3D
Animated Polygonal Models. In Articulated Motion
and Deformable Objects (Lecture Notes in Computer
Science, 7378), pages 194-203.
Sacks, R., Eastman, C. M., Lee, G. (2004). Parametric 3D
modeling in building construction with examples from
precast concrete. In Automation in Construction 13,
pages 291– 312.
Steel, J., Drogemuller, R., Toth, B. (2012). Model
interoperability in building information modelling. In
Software and Systems Modeling, 11, 1, pages 99-109.
Wloka, M. (2003). Batch, Batch, Batch: What Does It
Really Mean? Presentation at Game Developers
Conference 2003.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
206
