
Vehicle Detection with Context
Yang Hu and Larry S. Davis
Institute for Advanced Computer Studies, University of Maryland, 20742 College Park, MD, U.S.A.
Keywords:
Vehicle Detection, Context, Conditional Random Fields, Shadow, Ground, Orientation.
Abstract:
Detecting vehicles in satellite images has a wide range of applications. Existing approaches usually identify
vehicles from their appearance. They typically generate many false positives due to the existence of a large
number of structures that resemble vehicles in the images. In this paper, we explore the use of context infor-
mation to improve vehicle detection performance. In particular, we use shadows and the ground appearance
around vehicles as context clues to validate putative detections. A data driven approach is applied to learn
typical patterns of vehicle shadows and the surrounding “road-like” areas. By observing that vehicles often
appear in parallel groups in urban areas, we also use the orientations of nearby detections as another context
clue. A conditional random field (CRF) is employed to systematically model and integrate these different
contextual knowledge. We present results on two sets of images from Google Earth. The proposed method
significantly improves the performance of the base appearance based vehicle detector. It also outperforms
another state-of-the-art context model.
1 INTRODUCTION
With the launch of new generation of earth observa-
tion satellites, more and more high-resolution satellite
images with ground sampling distances of less than 1
meter have become publicly available. Small scale
objects such as vehicles can be readily seen in these
images. In this work, we consider the problem of de-
tecting vehicles from such high-resolution aerial and
satellite images. This problem has a number of ap-
plications in traffic monitoring and intelligent trans-
portation systems, urban planning and design, as well
as military and homeland surveillance. In spite of the
increasing resolution of aerial and satellite images,
vehicle detection still remains a difficult problem. In
urban settings especially, the presence of a large num-
ber of rectangular structures brings significant chal-
lenges to the detectors.
Vehicle detection has been explored a lot in the
literature. Most approaches only use the appearance
of vehicles for detection. Due to the existence of the
structures that resemble vehicles in the images, these
methods typically generate many false positives. In
this work, we investigate the use of context informa-
tion to improve vehicle detection performance.
Context is a useful information source for vi-
sual recognition. Psychology experiments show that
in the human visual system context plays an im-
port role in recognition (Oliva and Torralba, 2007).
In computer vision, using context has recently re-
ceived significant attention. It has been used suc-
cessfully in object detection and recognition (Rabi-
novich et al., 2007; Heitz and Koller, 2008; Divvala
et al., 2009) as well as many other problems such as
scene recognition (Murphy et al., 2003), action clas-
sification (Marszalek et al., 2009) and recognition of
human-object interactions (Yao and Fei-Fei, 2012).
We explore useful context clues for the detection
of vehicles. The first type of context information we
use are shadows. Instead of using image meta-data
to predict the expected location and shape of shad-
ows, we apply a data driven approach to learn the typ-
ical patterns of vehicle shadows from examples. We
also use the ground appearance around a vehicle as
another contextual clue. Unlike previous work (Chel-
lappa et al., 1994; Quint, 1997; Jin and Davis, 2007)
that requires maps of road network registered to im-
agery, we use image appearance and a data driven ap-
proach to determine whether a not a putative vehicle
detection is surrounded by “road-like” pixels. Finally,
by observing that in urban areas vehicles often appear
in parallel groups, we use the orientations of nearby
detections to validate the initial detections. We em-
ploy a conditional random field (CRF) to systemat-
ically model and integrate these different contextual
clues. The algorithms are evaluated on two sets of
images from Google Earth. The results indicate that
the proposed context model greatly improves vehi-
715
Hu Y. and S. Davis L..
Vehicle Detection with Context.
DOI: 10.5220/0004302907150722
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 715-722
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

cle detection performance over a baseline appearance
based detector. It also outperforms another recently
proposed context model.
The rest of this paper is organized as follows. We
first discuss related work in Section 2. Then, in Sec-
tion 3, we briefly introduce the partial least squares
baseline vehicle detector (Kembhavi et al., 2011) that
we use to obtain the initial detections to build the CRF
model. We present the CRF model, which is used
as a general framework to integrate different context
clues, in Section 4. We then discuss how we model
the three kinds of contextual information, i.e. shadow,
ground and orientations of nearby detections, in Sec-
tion 5. Experiment results are discussed in Section 6.
Finally, we conclude in Section 7.
2 RELATED WORK
Vehicle detection has previously been treated as a
template matching problem, and algorithms that con-
struct templates in 2D as well as 3D have been pro-
posed. Monn et al. (Moon et al., 2002) proposed an
approach to accurately detect 2D shapes and applied it
to vehicle detection. They derived an optimal 1D step
edge operatorand extended it along the boundarycon-
tour of the shape to obtain a shape detector. Choi and
Yang (Choi and Yang, 2009) first used a mean-shift
algorithm to extract candidate blobs that exhibit sym-
metry properties of typical vehicles and then verified
the blobs using a log-polar shape descriptor. Zhao and
Nevatia (Zhao and Nevatia, 2003) posed vehicle de-
tection as a 3D object recognition problem. They used
human knowledge to model the geometry of typical
vehicles. A Bayesian network was used to integrate
the clues including the rectangular shape of the car,
the boundary of the windshield and the outer bound-
ary of the shadow.
The detection of vehicle has also been treated
as a classification problem, and different machine
learning algorithms have been exploited for it. Jin
and Davis (Jin and Davis, 2007) used a morpholog-
ical shared-weight neural network to learn an vehi-
cle model. Grabner et al. (Grabner et al., 2008) pro-
posed to use on-line boosting in an interactive train-
ing framework to efficiently train and improve a vehi-
cle detector. Kembhavi et al. (Kembhavi et al., 2011)
presented a vehicle detector that improves upon pre-
vious approaches by incorporating a large and rich set
of image descriptors. They used partial least squares,
a classical statistical regression analysis technique, to
project the extremely high-dimensional feature onto a
much lower dimensional subspace for classification.
Contextual knowledge has been exploited for ve-
hicle detection in some previous systems. (Chellappa
et al., 1994; Quint, 1997; Jin and Davis, 2007) in-
tegrate external information from site-models or dig-
ital maps to reduce the search for vehicles to cer-
tain image regions such as road networks and parking
lots. Some use a vehicle’s shadow projection as lo-
cal context for vehicles (Hinz and Baumgartner,2001;
Zhao and Nevatia, 2003). In these works, meta-data
for aerial images are used to compute the direction
of sun rays and derive the shadow region projected
on the road surface. Heitz and Koller (Heitz and
Koller, 2008) present a ”things and stuff (TAS)” con-
text model that uses texture regions (e.g., roads, trees
and buildings) to add predictive power to the detec-
tion of objects and applied it to vehicle detection.
3 VEHICLE DETECTION USING
PARTIAL LEAST SQUARES
Our context model is built on the detections from a
sliding window vehicle detector. This detector slides
a window over the image, scores each window ac-
cording to its match to a pre-trained vehicle model,
and returns the windows with locally highest match-
ing scores. The vehicle model can be derived from
most standard classifiers. In this work we use a partial
least squares (PLS) based detector (Kembhavi et al.,
2011) to generate the initial detections.
PLS is a method that uses latent variables to
model the relations between sets of observed vari-
ables. The detector first uses PLS to project origi-
nal features onto a more compact space of latent vari-
ables. Then quadratic discriminant analysis (QDA)
is applied to classify the windows into vehicle and
background. Although computationally simple, this
detector has been shown to have good detection per-
formance for both vehicles (Kembhavi et al., 2011)
and human (Schwartz et al., 2009).
We use the Histograms of Oriented Gradients
(HOG) (Dalal and Triggs, 2005) feature for the detec-
tor. HOG captures the distribution of edges or gradi-
ents that are typically observed in image patches that
contain vehicles. Each detection window is divided
into square cells and a 9-bin HOG feature is calcu-
lated for each cell. Grids of 2× 2 cells are grouped
into a block, resulting in a 36D feature vector per
block. A multiscale approach that uses blocks at vary-
ing scales and varying aspect rations (1:1, 1:2, and
2:1) is employed (Zhu et al., 2006).
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
716

4 CONTEXT MODEL WITH
CONDITIONAL RANDOM
FIELDS
A detector that only relies on the appearance of the
vehicles will trigger many false alarms at locations
that show similar appearance patterns to vehicles. For
example, in images captured by wide-area motion im-
agery (WAMI) sensors, the vehicle detector is always
confused by electrical units and air conditioning units
on the tops of buildings. We propose to use contextual
information to reduce these false alarms.
One typical source of spatial contextual informa-
tion is shadows. Shadows provide information to dif-
ferentiate physical objects from texture regions with
confusing appearance. The shape of the shadow area
is closely related to the object casting it. These make
shadows important context clue for vehicle detection.
High level scene information is also very useful. Ve-
hicles should always appear on the roads or parking
lots instead of on trees or buildings. Therefore, inves-
tigating the type of the surrounding regions is also a
useful way to validate a detection. Additionally, since
nearby vehicles always move or park in the same ori-
entation, they provide strong contextual support for
each other.
To systematically employ all these sources of in-
formation, we use a conditionalrandom field (CRF) to
model and aggregate these contextual cues. After run-
ning the PLS based sliding window vehicle detector,
we construct a graph with the top scoring (and locally
maximal) detections from the detector as nodes and
connect nearby detections (i.e. the distance between
two detections is smaller than a threshold) by an edge.
We then define a CRF on that graph, which expresses
the log-likelihood of a particular label y (i.e. assign-
ment of vehicle/non-vehicle to each window) given
observed data x as a sum of unary and binary poten-
tials:
−logP(y|x;µ, λ) ∼
∑
i
∑
k
µ
k
φ
k
(y
i
, x
i
)+ (1)
∑
(i, j)∈ε
∑
l
λ
l
ψ
l
(y
i
, y
j
, x
i
, x
j
)
where ε is the set of edges between detections, φ
k
and
ψ
l
are the unary and pair-wise feature functions re-
spectively, and µ
k
and λ
l
are weights controlling the
relative importance of the terms.
Unary potentials measure the affinity of the pix-
els surrounding the detected locations to the presence
of vehicles. The likelihood that a detection window
contains a vehicle according to the PLS based vehicle
detector can be encoded in a unary term:
φ
p
(y
i
= 1, x
i
) = p
i
(2)
where p
i
is the confidence score for the ith window
obtained from the detector. The likelihood that the
detected object is accompanied by a vehicle shadow
and the likelihood that the object is on the ground are
also encoded in unary terms.
The binary potentials enforce the consistency of
the labels assigned to neighboring detections accord-
ing to their properties.
In the following sections, we describe the compu-
tation of these potentials in details.
5 CONTEXT CLUES
5.1 Shadow Clue
To use shadows as a context clue, we need to detect
them. Since we are interested in the shadows near
the detected objects, we only detect the shadows in
the areas near the locations obtained from the slid-
ing window vehicle detector. We use the appearance
of local regions to detect shadows. When a region is
in shadow, it becomes darker and less textured (Zhu
et al., 2010). Therefore, the color and texture of a re-
gion can help predict whether it is in shadow. Taking
a rectangular window centered at a detected location,
following (Guo et al., 2011), we first segment the win-
dow into regions using the mean shift algorithm (Co-
maniciu and Meer, 2002). Then for each region, the
color and texture are represented with a histogram in
L*a*b space and a histogram of textons respectively.
A SVM classifier with a χ
2
kernel, which is trained
from manually labeled regions, is used to determine
whether a region is in shadow. After classifying each
region in the window, we obtain a corresponding bi-
nary image which indicates the shadow areas in it.
We use these binary shadow images to compute the
shadow potential in the CRF model.
The absence of shadows in a shadow image can
help to filter out detections whose appearances are
similar to vehicles but do not have casting shadows.
For detections that have shadows, the position, shape
and size of the shadow area further reveals the type
of the object casting it. In some cases, some image
meta-data may be available, which make it possible
to calculate the shadows using the geometric relation-
ship of the sun and the vehicles. Then we can verify
a detection by comparing this theoretically computed
shadow with the shadow image obtained by running
the shadow detector. In general, however, we do not
have the corresponding meta-data and therefore are
not able to get the theoretical predictions for compar-
ison. In such cases, we learn the characteristics of
typical vehicle shadows from training images.
VehicleDetectionwithContext
717
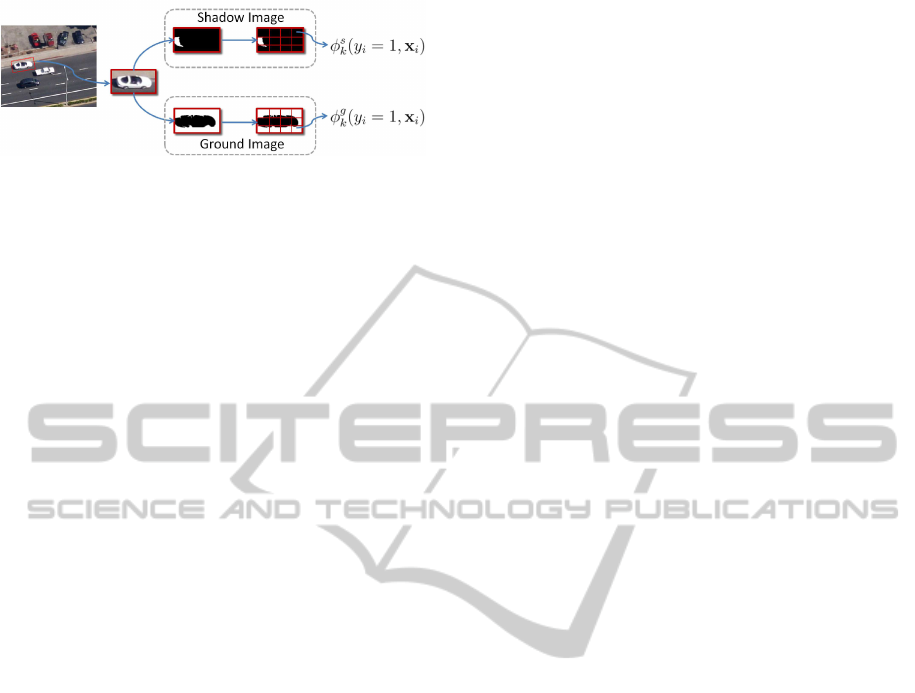
Figure 1: Illustration of the computing of shadow and
ground potentials.
Let I
s
i
denote the binary shadow image of the
ith detection; we assume that the likelihood that the
shadow is from a vehicle is linear function of the pix-
els in I
s
i
. A set of unary feature functions, each cor-
responding to a pixel in I
s
i
is defined, i.e. φ
s
j
(y
i
=
1, x
i
) = I
s
ij
, where I
s
ij
∈ {0, 1} is the jth pixel in I
s
i
.
Then the coefficients µ
s
j
learned by the CRF assign
different weights to the pixels according to their posi-
tions in the window. This definition, while precisely
differentiating each pixel, greatly increases the com-
plexity of the CRF model. On the other hand, nearby
pixels play similar roles for the prediction. To achieve
a better performance-cost trade off, we can assume
that they share the same weight. Among the many
different potential patterns of sharing the weights, we
simply divide the shadow image into a uniform grid
of cells and have all the pixels in a cell weighted by
the same coefficient. Then the unary potential of the
shadow clue can be expressed as
∑
i
∑
j
µ
s
c(I
s
ij
)
I
s
ij
(3)
where c(I
s
ij
) indicates the cell pixel I
s
ij
belongs to.
This is equivalent to
∑
i
∑
k
µ
s
k
φ
s
k
(y
i
= 1, x
i
) (4)
where φ
s
k
(y
i
= 1, x
i
) =
∑
c(I
s
ij
)=k
I
s
ij
. Here we define a
set of new feature functions, each of which computes
the sum of the pixels in a cell.
Note that the above feature functions are com-
puted over cells, making them robust to some posi-
tion variability of the shadows. This is very impor-
tant since the sliding window vehicle detector usu-
ally moves the windows with step size larger than 1
pixel. It is also not practicable for the detector to con-
sider every orientation. Therefore, the detected vehi-
cle may not lie in the center of the detection window,
and its orientation estimate is subject to some sam-
pling error. By only counting the number of pixels
that are in shadow for each cell, we make the compu-
tation of the shadow potential tolerant to these sources
of variance.
5.2 Ground Clue
Besides shadows, another important contextual clue
for vehicles is they are typically on roads, driveways
or parking lots. To utilize this information, we an-
alyze the surrounding regions of the detected loca-
tions. Specifically, we consider a rectangle window
centered at a candidate location, segment it into re-
gions and characterize their appearance using color
and texton histograms. Then, the regions are classi-
fied as ground or non-ground by a classifier. A binary
image, which indicates pixels that are classified as be-
longing to ground, is obtained. We refer to this as the
“ground image” for the candidate location.
The ground potential is calculated in a similar way
as the shadow potential. Let I
g
i
denote the ground im-
age of the ith detection. After dividing it into a uni-
form grids of cells, the ground potential is expressed
as
∑
i
∑
k
µ
g
k
φ
g
k
(y
i
= 1, x
i
) (5)
where φ
g
k
(y
i
= 1, x
i
) =
∑
c(I
g
ij
)=k
I
g
ij
, which corresponds
to the number of pixels that are assigned to ground in
the kth cell.
This method for computing ground potential is
based on a local analysis of the ground. One may
also first detect all the ground areas in the entire im-
age and then check the spatial relationships between
the candidate detections and the ground. The TAS
model (Heitz and Koller, 2008) operates in this fash-
ion although the ground areas are detected through
an unsupervised procedure. Since it explicitly con-
siders spatial relationships, it is effective at filtering
out detections that are not near roads. Our method,
on the other hand, not only expects a detection to be
mostly surrounded by ground, but it also can penalize
the situation in which ground appears in the center of
the detection window. This is important for removing
false positives that are on ground but do not contain
vehicles. This crucial difference between two meth-
ods will be illustrated in the experiment results.
5.3 Orientation Clue
In addition to the unary potentials, the frequent co-
occurrence of vehicles can be used to developa binary
potential.
Vehicles, while moving, typically move in the di-
rection of road lanes; in parking, there are also regu-
larities in the patterns of parking. Therefore, nearby
vehicles are usually oriented in the same orientation.
We can use this observation to validate nearby detec-
tions. Specifically, when two nearby detection win-
dows have the same orientation, it is more probable
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
718
that both of them contain vehicles. On the other hand,
when two nearby detection windows have quite differ-
ent orientations, the probability that they both are true
vehicle windows should be low. Although the specific
probabilities for different label combinations are hard
to assign manually, they can be estimated from train-
ing data by maximizing the likelihood of the data.
Let d(x
i
) ∈ (−180, 180] denotes the orientation
of the ith detection window; we classify the orien-
tation relations of two windows into three categories.
In the first case, the two windows are in exactly the
same orientation, i.e. |d(x
i
) − d(x
j
)| ∈ {0, 180}. In
the second, their orientations are only slightly differ-
ent, i.e. |d(x
i
) − d(x
j
)| ∈ (0, d
0
] ∪ [360 − d
0
, 360) ∪
[180−d
0
, 180)∪(180, 180+d
0
], where d
0
is a thresh-
old which is set to 20 in experiments. Otherwise, they
are in the third category.
Based on this classification, we define a set of bi-
nary feature functions:
ψ
1,···,8
(y
i
= 0, y
j
= 0, x
i
, x
j
) = [1, a
1
, a
2
, a
3
, 0, 0, 0, 0]
(6)
ψ
1,···,8
(y
i
= 1, y
j
= 1, x
i
, x
j
) = [0, 0, 0, 0, 1, a
1
, a
2
, a
3
]
(7)
ψ
1,···,8
(y
i
= 1, y
j
= 0, x
i
, x
j
) = ψ
1,···,8
(y
i
= 0, y
j
= 1,
(8)
x
i
, x
j
) = 0
where
a
1
=
1 if |d(x
i
) − d(x
j
)| ∈ {0, 180}
0 otherwise
(9)
a
2
=
1 if |d(x
i
) − d(x
j
)| ∈ (0, d
0
] ∪ [360−d
0
, 360)
∪[180− d
0
, 180) ∪ (180, 180+d
0
]
0 otherwise
(10)
a
3
=
1 if |d(x
i
) − d(x
j
)| ∈ (d
0
, 180−d
0
)
∪(180+ d
0
, 360−d
0
)
0 otherwise
(11)
We cansee that, based on their relativeorientation, the
probabilities that two windows both containing vehi-
cles or not will be different. We also introduce a bias
term, i.e. ψ
i
= 1, to represent some baseline likeli-
hood that is independent of the orientation clue.
6 EXPERIMENTS
To evaluate the CRF based contextmodel, we perform
experiments on two datasets. Although both of them
are satellite images acquired from Google Earth, the
appearance of the vehicles as well as the surrounding
scenes are quite different in the images of these two
sets.
0 0.2 0.4 0.6 0.8 1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
Precision
PLS AP=0.884
CRF(Ori) AP=0.89
CRF(Ori+Sha) AP=0.918
CRF(Ori+Gro) AP=0.92
CRF(Full) AP=0.927
(a) Performance of CRF models with different context clues.
0 0.2 0.4 0.6 0.8 1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
Precision
PLS AP=0.884
TAS AP=0.897
CRF(Full) AP=0.927
(b) Performance comparison with the TAS model.
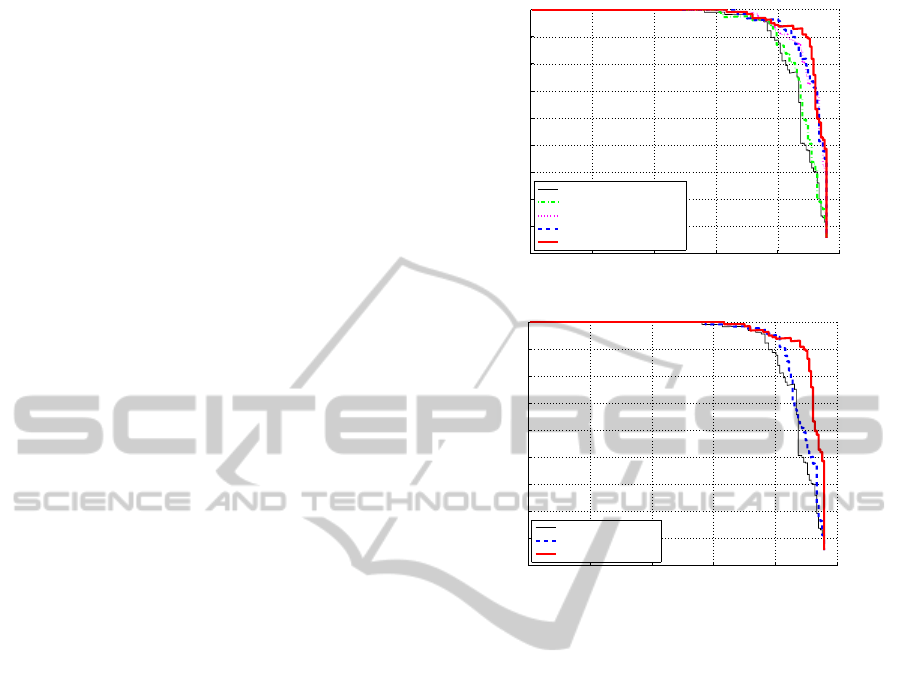
Figure 2: Precision-recall (PR) curves for Google Earth
Dataset I. AP stands for average precision.
6.1 Google Earth Dataset I
The first dataset contains 27 images of an area near
Mountain View, California. There are 391 manu-
ally labeled cars in them. The vehicles are viewed
obliquely with window size of 101× 51 pixels. We
use 14 images to train the CRF model and test the
performance on the remaining 13 images.
We first compare the performance of the CRF
models with different context clues. The PLS based
detector (Kembhavi et al., 2011) was used to gener-
ate the initial detections and also serves as the base-
line for comparison. Figure 2(a) shows the precision-
recall curves of CRF with only orientation clue
(CRF(Ori)), with both orientation and shadow clues
(CRF(Ori+Sha)), with both orientation and ground
clues (CRF(Ori+Gro)), and with all of the context
clues (CRF(Full)). The scores from the PLS detec-
tor is included as a unary feature in all these models.
We can see that although the orientation clue alone
only slightly improved the performance, when com-
bined with the shadow clue or the ground clue the de-
tection performance is significantly improved. The
effectiveness of shadow and ground clues are similar
VehicleDetectionwithContext
719
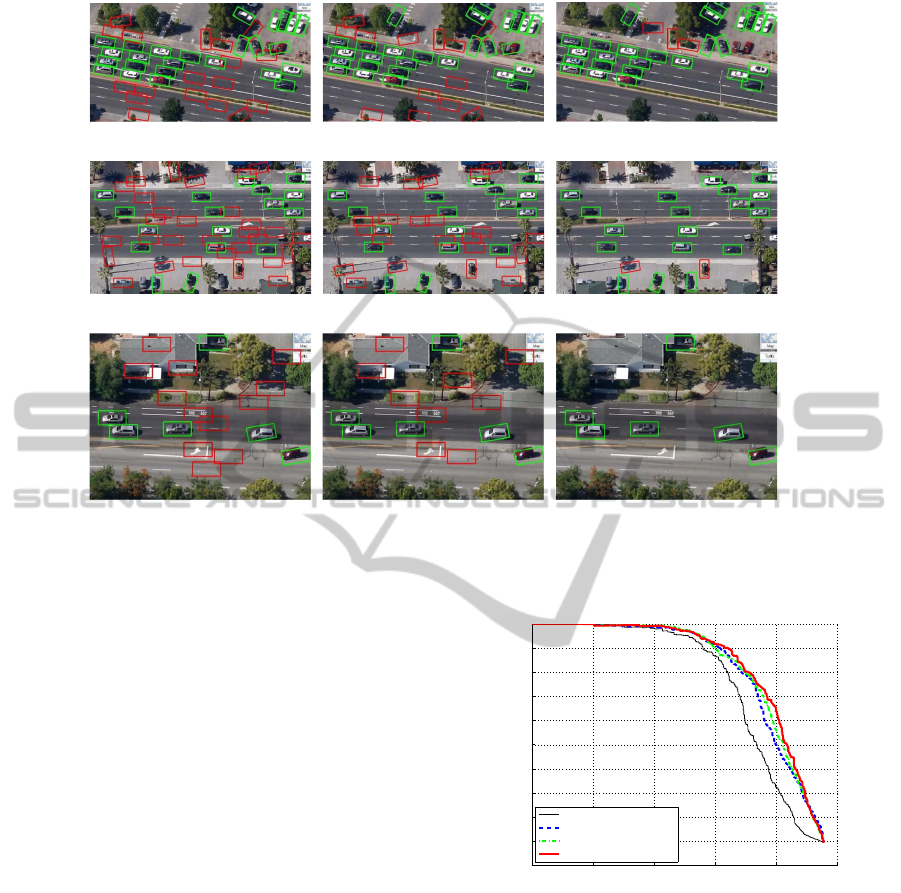
(a) PLS detections (b) TAS detections (c) CRF detections
(d) PLS detections (e) TAS detections (f) CRF detections
(g) PLS detections (h) TAS detections (i) CRF detections
Figure 3: Example images of Google Earth Dataset I, with detections found by the PLS detector, the TAS model and our
CRF(Full) model. The results at recall of 0.9 are shown. Green windows indicate true detections and red windows are false
positives.
and also complementary to each other. When com-
bined together (CRF(Full)), the detection accuracy is
further improved.
We compare the performance of our CRF based
context model with the things and stuff (TAS) context
model (Heitz and Koller, 2008) in Figure 2(b). We
provided the TAS model with the same initial detec-
tions as the CRF model. We can see that although
the TAS model also improved the PLS result, the im-
provement is much smaller than our CRF based con-
text model. This illustrates the advantage of the con-
text clues we used.
We show in Figure 3 some example images, with
detections found by the PLS detector, the TAS model
and our CRF(Full) model respectively at a 90% recall
rate. We can see that the PLS detector generates many
false detections. The TAS model only filters out some
of the false positives. With our CRF based context
model, most of the false detections are removed.
6.2 Google Earth Dataset II
The second dataset is from TAS (Heitz and Koller,
2008). It contains satellite images of the city and
suburbs of Brussels, Belgium. There are 30 images,
of size 792 × 636 pixels. A total of 1319 cars are
manually labeled in them. A car window is approxi-
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
Precision
PLS AP=0.738
TAS AP=0.794
CRF(Ori) AP=0.801
CRF(Ori+Gro) AP=0.81
Figure 4: Precision-recall (PR) curves for Google Earth
Dataset II. AP stands for average precision.
mately 45 × 25 pixels. We use half of the images to
train the context models and then test the performance
on the other half of the dataset. The TAS model
was trained with parameters suggested by (Heitz and
Koller, 2008).
We show in Figure 4 the precision-recall curves of
the PLS detector, the TAS model and our CRF based
context models on this dataset. Compared with the
previous dataset, a wider variety of surrounding en-
vironments other than the road occur in the images
in this dataset. This enables the TAS model to better
utilize the stuff, e.g. the roofs of houses, the trees and
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
720
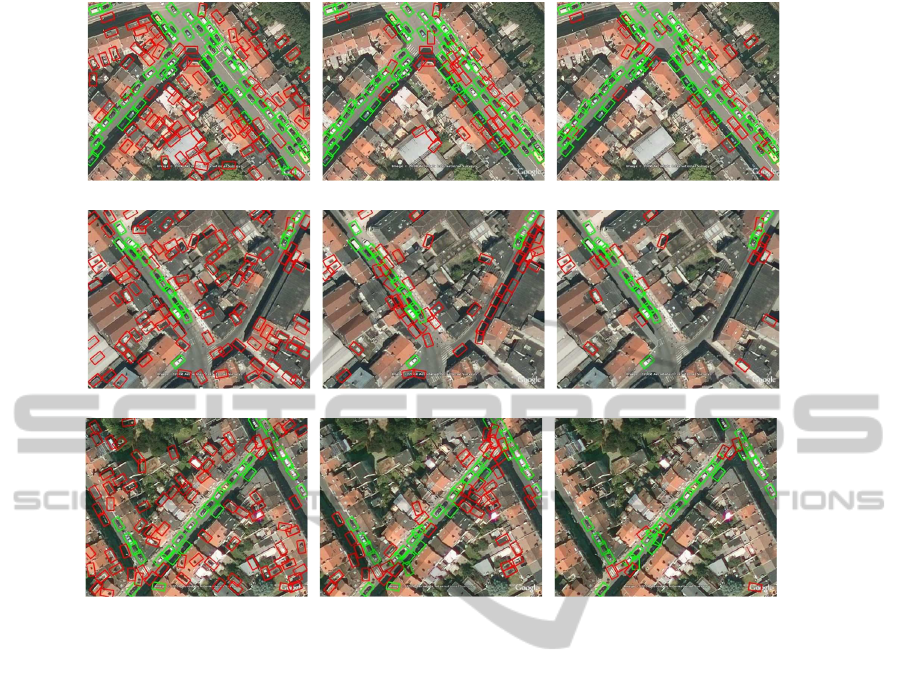
(a) PLS detections (b) TAS detections (c) CRF detections
(d) PLS detections (e) TAS detections (f) CRF detections
(g) PLS detections (h) TAS detections (i) CRF detections
Figure 5: Example images of Google Earth Dataset II, with detections found by the PLS detector, the TAS model and our
CRF(Ori+Gro) model. The results at recall of 0.8 are shown. Green windows indicate true detections and red windows are
false positives.
water regions, to add predictive power to the detection
of vehicles. Therefore, the TAS model achieved much
larger performance improvement over the initial PLS
results on this dataset than on the previous one. On
the other hand, since the vehicles are more spatially
proximate, the CRF model that only uses the orienta-
tion clue also achieved larger performance gain here
than on the other dataset. After adding the ground
clue, the performance was further improved. Since
the sun was overhead, there are hardly any shadows
around the vehicles. We therefore do not have result
using the shadow clue for this dataset.
Figure 5 shows examples of the detections ob-
tained by the three methods. Again we can see the
PLS result includes many false alarms at the 80%
recall point. The TAS model filtered out many of
these false positives, especially those that are not near
roads. The results of our CRF model are even better.
In addition to the windows that are not on the road,
those that are on the road but do not contain vehicles
are also removed.
7 CONCLUSIONS
We explored the use of context information for ve-
hicle detection in high-resolution aerial and satellite
images. We presented an effective way to use both
shadow and ground clues. The consistency of the
orientations of nearby detections was also shown to
be very useful context information. A CRF model
was used to integrate the different types of contextual
knowledge. Experiments on two very different sets
of Google Earth images show that our method greatly
improved the performance of the base vehicle detec-
tor.
ACKNOWLEDGEMENTS
This material is based upon work supported by the
Air Force Research Laboratory (AFRL) under Con-
tract No. FA8750-11-C-0091. Any opinions, find-
ings and conclusions or recommendations expressed
VehicleDetectionwithContext
721

in this material are those of the authors and do not
necessarily reflect the views of AFRL or the U.S.
Government.
REFERENCES
Chellappa, R., Zheng, Q., Davis, L., Lin, C., Zhang, X., Ro-
driguez, C., Rosenfeld, A., and Moore, T. (1994). Site
model based monitoring of aerial images. In Image
Understanding Workshop.
Choi, J.-Y. and Yang, Y.-K. (2009). Vehicle detection from
aerial images using local shape information. In Pro-
ceedings of the 3rd Pacific Rim Symposium on Ad-
vances in Image and Video Technology.
Comaniciu, D. and Meer, P. (2002). Mean shift: a robust
approach toward feature space analysis. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
24(5):603–619.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proceedings of the
18th IEEE Conference on Computer Vision and Pat-
tern Recognition.
Divvala, S., Hoiem, D., Hays, J., Efros, A., and Hebert, M.
(2009). An empirical study of context in object detec-
tion. In Proceedings of the 22th IEEE Conference on
Computer Vision and Pattern Recognition.
Grabner, H., Nguyen, T. T., Gruber, B., and Bischof, H.
(2008). On-line boosting-based car detection from
aerial images. ISPRS Journal of Photogrammetry and
Remote Sensing, 63(3):382–396.
Guo, R., Dai, Q., and Hoiem, D. (2011). Single-image
shadow detection and removal using paired regions.
In Proceedings of the 24th IEEE Conference on Com-
puter Vision and Pattern Recognition.
Heitz, G. and Koller, D. (2008). Learning spatial context:
using stuff to find things. In Proceedings of the 10th
European Conference on Computer Vision.
Hinz, S. and Baumgartner, A. (2001). Vehicle detec-
tion in aerial images using generic features, group-
ing, and context. In Proceedings of the 23rd DAGM-
Symposium on Pattern Recognition.
Jin, X. and Davis, C. H. (2007). Vehicle detection from
high-resolution satellite imagery using morphologi-
cal shared-weight neural networks. Image and Vision
Computing, 25(9):1422–1431.
Kembhavi, A., Harwood, D., and Davis, L. S. (2011). Vehi-
cle detection using partial least squares. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
33(6):1250–1265.
Marszalek, M., Laptev, I., and Schmid, C. (2009). Actions
in context. In Proceedings of the 22th IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Moon, H., Chellappa, R., and Rosenfeld, A. (2002). Opti-
mal edge-based shape detection. IEEE Transactions
on In Image Processing, 11(11):1209–1227.
Murphy, K., Torralba, A., and Freeman, W. (2003). Using
the forest to see the trees: a graphical model relating
features, objects, and scenes. In Advances in Neural
Information Processing Systems.
Oliva, A. and Torralba, A. (2007). The role of context
in object recognition. Trends in Cognitive Sciences,
11(12):520–527.
Quint, F. (1997). MOSES: a structural approach to aerial
image understanding. Automatic Extraction of Man-
made Objects from Aerial and Space Images (II),
pages 323–332.
Rabinovich, A., Vedaldi, A., Galleguillos, C., Wiewiora, E.,
and Belongie, S. (2007). Objects in context. In Pro-
ceedings of the International Conference on Computer
Vision.
Schwartz, W. R., Kembhavi, A., Harwood, D., and Davis,
L. S. (2009). Human detection using partial least
squares analysis. In Proceedings of the 12th Inter-
national Conference on Computer Vision.
Yao, B. and Fei-Fei, L. (2012). Recognizing human-object
interactions in still images by modeling the mutual
context of objects and human poses. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence.
Zhao, T. and Nevatia, R. (2003). Car detection in low res-
olution aerial images. Image and Vision Computing,
21(8):693–703.
Zhu, J., Samuel, K. G. G., Masood, S. Z., and Tappen, M. F.
(2010). Learning to recognize shadows in monochro-
matic natural images. In Proceedings of the 23th IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Zhu, Q., Avidan, S., Yeh, M.-C., and Cheng, K.-T. (2006).
Fast human detection using a cascade of histograms of
oriented gradients. In Proceedings of the 19th IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
722
