
Visual-based Natural Landmark Tracking Method to Support UAV
Navigation over Rain Forest Areas
Felipe A. Pinagé
1
, José Reginaldo H. Cavalho
1
and José P. Queiroz Neto
2
1
Institute of Computing,Federal University of Amazonas, Manaus, Brazil
2
Campus Manaus Industrial District, Federal Institute of Amazonas, Manaus, Brazil
Keywords: Natural Landmark Tracking, Features Supression, Wavelet Transform, Unmanned Aerials Vehicle.
Abstract: Field application of unmanned aerials vehicles (UAVs) have increased in the last decade. An example of
difficult task is long endurance missions over rain forest, due to the uniform pattern of the ground. In this
scenario an embedded vision system plays a critical role. This paper presents a SIFT adaptation towards a
vision system able to track landmarks in forest areas, using wavelet transform to suppression of nonrelevant
features, in order to support UASs navigation. Preliminary results demonstrated that this method can
correctly track a sequence of natural landmarks in a feasible time for online applications.
1 INTRODUCTION
The use of Unmanned Aerial Systems (UASs) in
real scenarios has increased in recent decades due to
its advantages when compared to manned aerial
systems, especially in avoiding risks to human
operators, as they are not in the cockpit, but
comfortably seated miles of distance away of the
operation theatre. UAS applications spans from
military to civil domains and can cover a dozen of
different types of missions, including border
security, combat, scientific research, environmental
monitoring, among many others.
In (Bueno et al, 2001), one can find results of an
system prototype based on an airship designed for
environmental monitoring, more specific, for the
Amazon rain forest area. However, there are
difficulties to operate autonomously in all-weather
condition, while ensuring a safe flight, demanded
better navigation systems than the ones available at
that time for scientific research applications.
On the other hand, the lack of effective civil
applications of UAS to help protecting the Amazon
Rain forest shows that the challenges are still
beyond what current solutions can provide. For
instance, a relevant problem to be faced is the
navigation over the Amazon due to the all-equal
treetops view from above, even with good weather
and long-range visibility. The problem complexity
increases dramatically in the occurrence of fog or a
cloudy weather (not mentioning rain). In such
scenario, natural landmarks on the ground play an
important role in navigation supporting system,
providing to the vehicle references to be followed.
Moreover, to extend off-the-shelf vision systems to
treat natural landmarks is, basically, an issue of
software development.
As natural landmarks, one may have clearings,
river branches, or any element that contrasts from
the uniform pattern of the canopy (for forests,
canopy refers to the upper layer). The problem of
tracking of the natural landmarks in forest areas
starts to be treated (Pinagé et al., 2012), but remains
a challenge.
The autonomy of an UAV increases with an
embedded vision system helps to solve unexpected
critical situations, e.g., loss of Global Positioning
System signal (GPS), and the ability to interact with
the environment using natural landmarks (Cesetti et
al., 2009). The aerial navigation system can decide
the next target, and change it as new and updated
images of the environment become available.
This paper presents a methodology solely
defined by software to track natural landmarks in
real-time, among a set of predefined ones to extent
UAS navigation capability in the context of the
Amazon rain forest.
The paper is organized as follows. Section 2
details the method specification, describes the image
processing techniques and how they are applied.
Section 3 presents the preliminary results. Finally, in
Section 4 concludes the paper.
416
Pinagé F., Cavalho J. and Neto J..
Visual-based Natural Landmark Tracking Method to Support UAV Navigation over Rain Forest Areas.
DOI: 10.5220/0004304304160419
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 416-419
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 METHOD DESCRIPTION
The block diagram of Figure 1 shows how the steps
are organized. The UAV reaches (using GPS) the
search space (the neighborhood area of the reference
image) by GPS and then activate the vision system.
Initially, the canopy pattern is eliminated via
multiresolution analysis of images based on wavelet
transform. In this case, at a larger scale it is possible
to extract only the salient features and suppress the
nonrelevant ones (Fonseca et al, 2008). This is
necessary, otherwise during feature extraction
hundreds of useless features, related to leaves,
branches, and other small image elements related to
a typical canopy texture, will be found.
We use multiresolution analysis to adapt the SIFT
in order to eliminate the canopy pattern.
In summary, the current video frames are
processed online to compare their keypoints with the
ones at the reference image. This way the natural
landmark is tracked. As soon as the landmark is
found the vision system locks it, while preparing to
search the next landmark.
2.1 Nonrelevant Features Suppression
The wavelet transform is an useful and powerful tool
for image local analysis and processing. As digital
images are discrete data, we use the discrete wavelet
transform (DWT). This way, only really large and
robust features will be well represented.
According to (Meddeber et al, 2009), the same
image is represented in different resolutions and
scales in each decomposition level. Thus, the
nonrelevant features disappear in the low resolutions
(large scales) and the biggest and really important
features can be identified more easily.
In each decomposition level is created four
images (sub-bands): LL, LH, HL and HH. This
decomposition can be repeated recursively, reaching
other levels. Therefore, LL sub-band contains
maximum information compared to others sub-bands
(Malviya and Bhirud, 2009), and it is considered the
approximation of original image, also with the small
features suppressed.
2.2 Keypoints Identification and Point
Matching
The main process is the identification of keypoints
in the acquired image and matching them with the
reference image keypoints set. In this paper, the
keypoints can be rivers, roads, its details (corners,
turns, margins, etc) or any information that does not
correspond only to trees.
There are automatic methods to identify
keypoints, developed from algorithms that use
similarity measurements. The same method applied
in the identification of the keypoints of the reference
image (done offline) has to be applied in the sensed
video frame (during the flight). The SIFT, developed
by (Lowe, 2004) was utilized in this work to
generate descriptors of keypoints which are invariant
to scale, rotation and partially invariant to change in
illumination.
There are also other methods for automatic point
identification and matching, such as SURF (Speed
Up Robust Features) and ASIFT (Affine SIFT).
Both are extensions of the SIFT. The SURF (Bay et
al, 2006) uses integral images for image convolution
and thus computing and comparing features much
faster. And the ASIFT (Morel & Yu, 2009) uses the
same SIFT techniques to be invariant to scale and
rotation, combined with point of view simulations,
which provides much more correct matches.
Therefore, as confirmed by the experimental results
in the next section, SIFT is by far the best suited
method for feature matching to our scenario of
application.
2.3 SIFT Adaptation
As wavelet advantages mentioned before, the SIFT
algorithm was adapted in order to detect only
relevant features for this problem, in addition to
reduce your runtime. In (Kim et al, 2007), they
propose a SIFT adaptation that uses Difference of
Wavelets (DoW) for detection of local extrema.
Applied to forest images, this method extract a lot of
features including canopy pattern, it can be verified
in the next section.
Inspired in DoW method, we use the LL sub-
bands of wavelet decomposition just to be the first
image of each octave in the space-scale generated by
SIFT (Figure 2). This way, the wavelet transform is
responsible to suppress nonrelevant features each
next octave.
3 PRELIMINARY RESULTS
The software application was implemented using
C++ language with OpenCV library. The images and
videos used were obtained by flights over forest
areas near the cities of Manaus and Belo Horizonte
(Brazil).
Visual-basedNaturalLandmarkTrackingMethodtoSupportUAVNavigationoverRainForestAreas
417
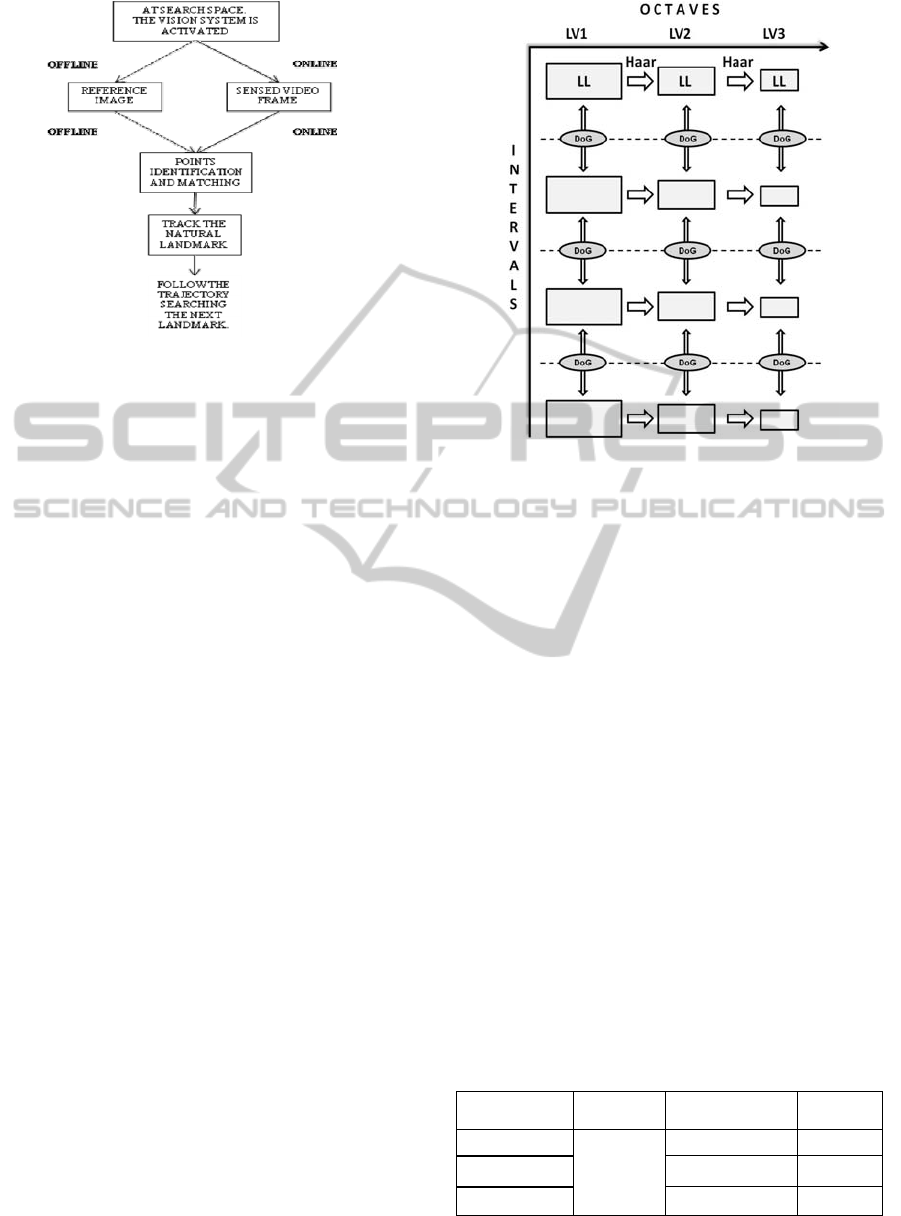
Figure 1: Natural landmark tracking scheme.
The results are obtained after the matching process
between the reference image containing the natural
landmark and the sensed frame that simulated the
online video frame of the UAV; these input data
were obtained by the same sensor, in different time,
angles and altitudes.
SIFT, SURF and ASIFT algorithms were applied
to detect the keypoints and afterwards match the
images. These three algorithms were compared to
validate their feasibility for this specific application.
Table I presents the average runtime and the
accuracy rate of each algorithm. It is clear that the
ASIFT has a large amount of correct matches,
however, it has a computational cost unfeasible for
this real-time operation. SURF, on the other hand,
although fast, has many wrong matches.
SIFT presented the best trade-off between
matches and computational effort, with a sufficient
amount of correct matches to track the natural
landmark and an acceptable runtime when
considering this real-time operation.
SIFT was adapted for improve the keypoints
detection by suppressing of the nonrelevant features
(canopy). The DoW method detects many keypoints
including the canopy (Figure 3(b)), the opposite of
the objective of this work. Therefore it is not
feasible for this application.
Our SIFT adaptation only substitutes the first
images of each octave for the LL sub-bands obtained
by Haar wavelet decomposition, and keeping the
Gaussians for the intervals, as shown in Figure 2.
The keypoints detected by our SIFT adaptation can
be verified in Figure 3(c). Our SIFT adaptation has a
computational cost very close to original SIFT.
However, the differential of our adaptation is being
able to suppress canopy pattern.
Figure 2: Our SIFT adaptation.
This paper shows one tracking test using our SIFT
adaptation, which can be observed in Figure 4,
which images at left are the sensed frame, and the
images at right are the reference images.
Furthermore, this tracked frame will be also
stored to be used as natural landmark and support
next missions over the same area and similar
weather conditions.
4 CONCLUSIONS
All implementations were solely based on software.
The methodology combines two existing image
processing techniques focusing in your importance
to this application.
We could conclude that SIFT is the best of the
three tested algorithms, because it does not to exceed
the computational cost required for real-time
systems, and does not have many wrong matches.
The runtime of the tests were very promising
with respect to the feasibility of this method to an
embedded vision system.
Table 1: Average runtime and accuracy rate.
Algorithm Steps
Average
Runtime (s)
Accuracy
Rate (%)
SIFT
Points
Detection
and
Matching
0,9273 97
SURF 0,0319 75
ASIFT 9,66 99
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
418
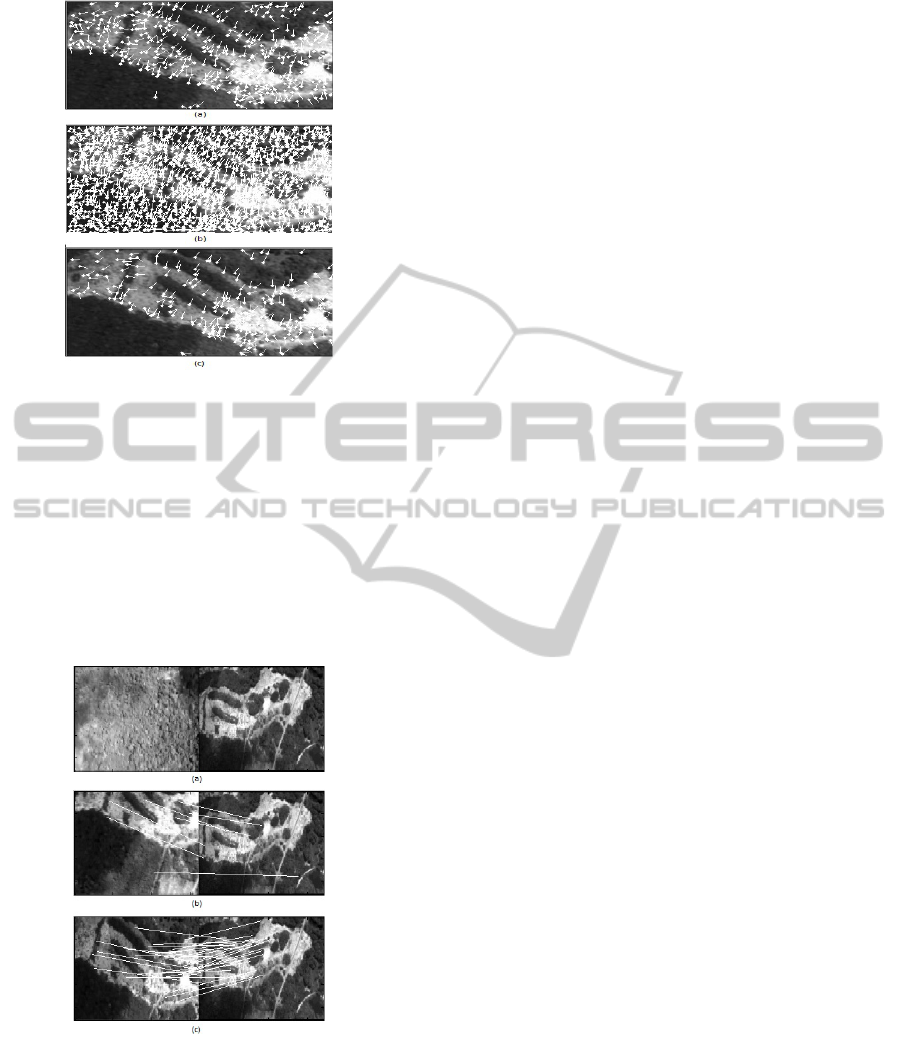
Figure 3: Keypoints detection: (a) original SIFT; (b) SIFT
by DoW; (c) Our SIFT adaptation.
Our SIFT adaptation is useful for this application to
eliminate canopy pattern by wavelet decomposition,
detect more easily the relevant features, and thus,
ensure the correct natural landmark tracking.
Next steps include the increasing of the database
of images. In addition to treating the occurrence of
clouds that can cause occlusion of natural
landmarks. Finally, the system will be embedded for
the validation during experimental flights.
Figure 4: Tracking: (a) Any matches were found, the
frame contains only clouds and tree pattern; (b) bad
representation of the natural landmark; (d) final result and
best representation of the natural landmark.
ACKNOWLEDGEMENTS
This work is partially sponsored by Financing
Agency for Studies and Projects (Finep) under grant
number 01-10 0611-00, the Foundation for Research
Support of the State of Amazonas (FAPEAM),
process 01135/2011, and the National Institute of
Science and Technology on Embedded Critical
Systems (INCT-SEC, processes 573963/2008-8 and
08/57870-9).
REFERENCES
Bueno, S. S., Bergerman, M., Ramos Jr, J. G., Paiva, E.
C., Carvalho, J. R. H., Elfes, A., Maeta, S. M.,
Mirisola, L. G. B., Faria, B. G. and Pereira, C. S.
(2001) “Robótica Aérea em Preservação Ambiental: O
Uso de Dirigíveis Autônomos”. In: 7a. Reunião
Especial da SBPC, Manaus-AM.
Pinagé, F. A., Carvalho, J. R. H. and Queiroz-Neto, J. P.
(2012). “Natural landmark tracking method to support
UAV navigation over rain forest areas”. In: Workshop
of Embedded Systems of SBESC, Natal, Brazil.
Cesetti, A., Frontoni, E., Mancini, A., Zingaretti, P. and
Longhi, S. (2009). “Vision-based Autonomous
Navigation and Landing of an Unmanned Aerial
Vehicle using Natural Landmarks”. In: 17th
Mediterranean Conference on Control & Automation.
Thessaloniki, Greece.
Fonseca, L. M., Costa, M. H. M., Korting, T. S., Castejon,
E. and Silva, F. C. (2008) “Multitemporal Image
Registration Based on Multiresolution
Decomposition”. Revista Brasileira de Cartografia No
60/03. (ISSN 1808-0936).
Meddeber, L., Berrached, N. E. and Taleb-Ahmed, A.
(2009). “The Practice of an Automatic Registration
System based on Contour Features and Wavelet
Transform for Remote Sensing Images”. IEEE Second
International Conference on Computer and Electrical
Engineering.
Malviya, A. and Bhirud, S. G. (2009). “Wavelet based
Image Registration Using Mutual Information”. In:
International Conference on Emerging Trends in
Electronic and Photonic Devices & Systems, Varanasi,
India.
Lowe, D. (2004). “Distinctive Image Features from Scale
Invariant Keypoints”. In: International Journal of
Computer Vision. vol. 60, No. 2, pp. 91-110.
Bay, H., Tuytelaars, T. and Gool, V. (2006). “SURF:
Speed Up Robust Features”. In Proceedins of the
Ninth European Conference on Computer Vision.
Morel, J. M. and Yu, G. (2009). “A New Framework for
FullyAffine Invariant Image Comparison”. In: SIAM
Journal of Image Sciences, vol 2 (2).
Kim, Y., Lee, J., Cho, W., Park, C., Park, C. and Paik, J.
(2007). “Vision Systems: Segmentation and Pattern
Recognition”, ISBN 987-3-902613-05-9, Edited by:
Goro Obinata and Ashish Dutta, pp.546, I-Tech,
Vienna, Austria.
Visual-basedNaturalLandmarkTrackingMethodtoSupportUAVNavigationoverRainForestAreas
419
