
Improving User Experience via Motion Sensors in an
Ambient Intelligence Scenario
Giuseppe Lo Re, Marco Morana and Marco Ortolani
DICGIM, University of Palermo, Viale delle Scienze, ed. 6, Palermo, Italy
Keywords:
HCI, Sensor Networks, Ambient Intelligence, Embedded Systems.
Abstract:
Ambient Intelligence (AmI) is a new paradigm in Artificial Intelligence that aims at exploiting the information
about the environment state in order to adapt it to the user preferences. AmI systems are usually based on
several cheap and unobtrusive sensing devices that allow for continuous monitoring in different scenarios.
In this work we present a gesture recognition module for the management of an office environment using a
motion sensor device, namely Microsoft Kinect, as the primary interface between the user and the AmI system.
The proposed gesture recognition method is based on both RGB and depth information for detecting the hand
of the user and a fuzzy rule for determining the state of the detected hand. The shape of the hand is interpreted
as one of the basic symbols of a grammar expressing a set of commands for the actuators of the AmI system.
In order to maintain a high level of pervasiveness, the Kinect sensor is connected to a miniature computer
capable of real-time processing.
1 INTRODUCTION
With the widespread diffusion of cheap and unob-
trusive sensing devices, nowadays it is possible to
perform continuous monitoring of a wide range of
different environments. The availability of an ever-
increasing amount of data acquired by such sensor de-
vices, has piqued the interest of the scientific commu-
nity in producing novel methods for combining raw
measurements in order to understand what is happen-
ing in the monitored scenario.
Many works have been proposed in literature that
address the problem of heterogeneous data analysis
for obtaining a unitary representation of the observed
scene. In particular, Ambient Intelligence (AmI) is
a new paradigm in Artificial Intelligence that aims
at exploiting the information about the environment
state in order to adapt it to the user preferences. Thus,
the intrinsic requirement of any AmI system is the
presence of pervasive sensory devices; moreover, due
the primary role of the end user, an additional require-
ment is to provide the system with efficient HCI func-
tionalities. Considering the high level of pervasive-
ness obtained through the use of the nowadays avail-
able sensory and actuating devices, the use of equally
unobtrusive interfaces is mandatory.
In this work we present a system for the manage-
ment of an office environment, namely the rooms of
a university department, using a motion sensor de-
vice, i.e. Microsoft Kinect, as the primary interface
between the user and the AmI system. In our architec-
ture, the sensory component is implemented through
a Wireless Sensor and Actuator Network (WSAN),
whose nodes are equipped with off-the-shelf sensors
for measuring such quantities as indoor and outdoor
temperature, relative humidity, ambient light expo-
sure and noise level. Such networks (De Paola et al.,
2012b) do not only passively monitor the environ-
ment, but represent the tool allowing the system to
interact with the surrounding world. WSANs are the
active part of the system and allow to modify the en-
vironment according to the observed data, high-level
goals (e.g., energy efficiency) and user preferences.
In our vision, Kinect represents both a sensor
(since it is used for some monitoring tasks, i.e. people
counting) and a controller for the actuators. In par-
ticular, the people counter algorithm we developed is
based on an optimized version of the method natively
implemented by the Kinect libraries, taking into ac-
count the limited computational resources of our tar-
get device. The actuators control is performed by
training a fuzzy classifier for recognizingsome simple
gestures (i.e., open/closed hands) in order to produce
a set of commands opportunely structured by means
of a grammar. The use of a grammar for the com-
prehension of the visual commands is also exploited
29
Lo Re G., Morana M. and Ortolani M..
Improving User Experience via Motion Sensors in an Ambient Intelligence Scenario.
DOI: 10.5220/0004306000290034
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2013), pages 29-34
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

since we make use of the parser in order to fine tune
the behavior of the fuzzy recognizer.
The paper is organized as follows: related works
are presented in Section 2, while the proposed sys-
tem architecture is described in Section 3. An exper-
imental deployment realized in our department will
be discussed in Section 4. Conclusions will follow in
Section 5.
2 RELATED WORK
The core of our proposal involves the use of a reli-
able gesture detection device, and we selected Mi-
crosoft Kinect as a promising candidate to this aim.
Kinect is based on the hardware reference design
and the structured-light decoding chip provided by
PrimeSense, an Israeli company whose also provides
a framework, OpenNI, that supplies a set of APIs
to be implemented by the sensor devices, and an-
other set of APIs, NITE, to be implemented by the
middleware components. Moreover, PrimeSense ha
recently released a proprietary Kinect-based sensor,
called PrimeSense 3D Sensor.
Even if Kinect has been on the market for a couple
of years, it has attracted a number of researchers due
to the availability of open-source and multi-platform
libraries that reduce the cost of developing new algo-
rithms. A survey of the sensor and corresponding li-
braries is presented in (Kean et al., 2011; Borenstein,
2012).
In (Xia et al., 2011) a method for human bodies
detection using depth information taken by the Kinect
is presented. The authors perform the detection task
by applying some state of the art computer vision
techniques, however their system is developed in a
traditional PC so that computationally intensive tasks
(i.e., 3D modeling) cannot be implemented in a low-
power device. The problem of segmenting humans by
using the Kinect is also addressed in (Gulshan et al.,
2011), while the authors of (Raheja et al., 2011) fo-
cused on hand tracking. The authors presented an in-
tuitive solution by detecting the palm and then the fin-
gers, however, in order to obtain high-resolution hand
images that can be successfully processed, the user is
forced to stay close to the Kinect.
In our vision, the Kinect sensor represents an
“eye” that observes the user acting freely in the en-
vironment, collects information and forwards user re-
quest to a reasoner according to the architecture de-
scribed in (De Paola et al., 2012a). The remote de-
vices act as the termination of a centralized sentient
reasoner that is responsible of intelligent processing.
Higher-level information is extracted by sensed data
!"##$%&'()"*'%
*'+,&-.#'*%
!"#$%&%$#$%'
/'0'*% 12*('*%
!"##$%&'
!
()*+',%-(.'
1
+,&-.#'*%
$&#,)),/0*')1#/"0)'
Figure 1: Block diagram of the proposed gesture recogni-
tion algorithm.
in order to produce the necessary actions to adapt the
environment to the users requirements. A set of actu-
ators finally takes care of putting the planned modifi-
cations to the environment state into practice.
3 SYSTEM OVERVIEW
In the context of Ambient Intelligence, a key require-
ment is that the presence of the monitoring and con-
trol infrastructure is hidden from the users, so as to
provide a smoother way for them to interact with the
system. For the purpose of the present discussion, we
will specifically consider the possibility for the users
to interact with the available actuators, as naturally as
possible, by controlling their operation mode and by
querying them about their current state. For instance,
the user can control some actuators (e.g. air condi-
tioning system, or lighting) by providing a set of sub-
sequent commands for obtaining complex configura-
tions, e.g., turn on the air conditioning system, set the
temperature to a certain degree, set the fan speed to a
particular value, set the air flow to a specified angle
and so on.
Figure 1 shows a block diagram for the HCI mod-
ule of our system; namely it depicts the core compo-
nents of the proposed gesture recognition algorithm.
The actions of the users are captured by Kinect and
analyzed by the Fuzzy Gesture Recognizer. The rec-
ognized input symbols are then processed by our in-
terpreter and, at each step (i.e. for every recognized
gesture), a set of the next admissible input symbols is
provided as feedback to the fuzzy classifier.
3.1 Fuzzy Gesture Recognition
Several vision-based systems have been proposed
during the last 40 years for simple gesture detection
and recognition. However, the main challenge of any
computer vision approach is to obtain satisfactory re-
sults not only in a controlled testing environment, but
also in complex scenarios with unconstrained lighting
conditions, e.g., a home environment or an office. For
this reason, image data acquired by multiple devices
are usually merged in order to increase the system re-
liability. In particular, range images, i.e., 2D images
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
30
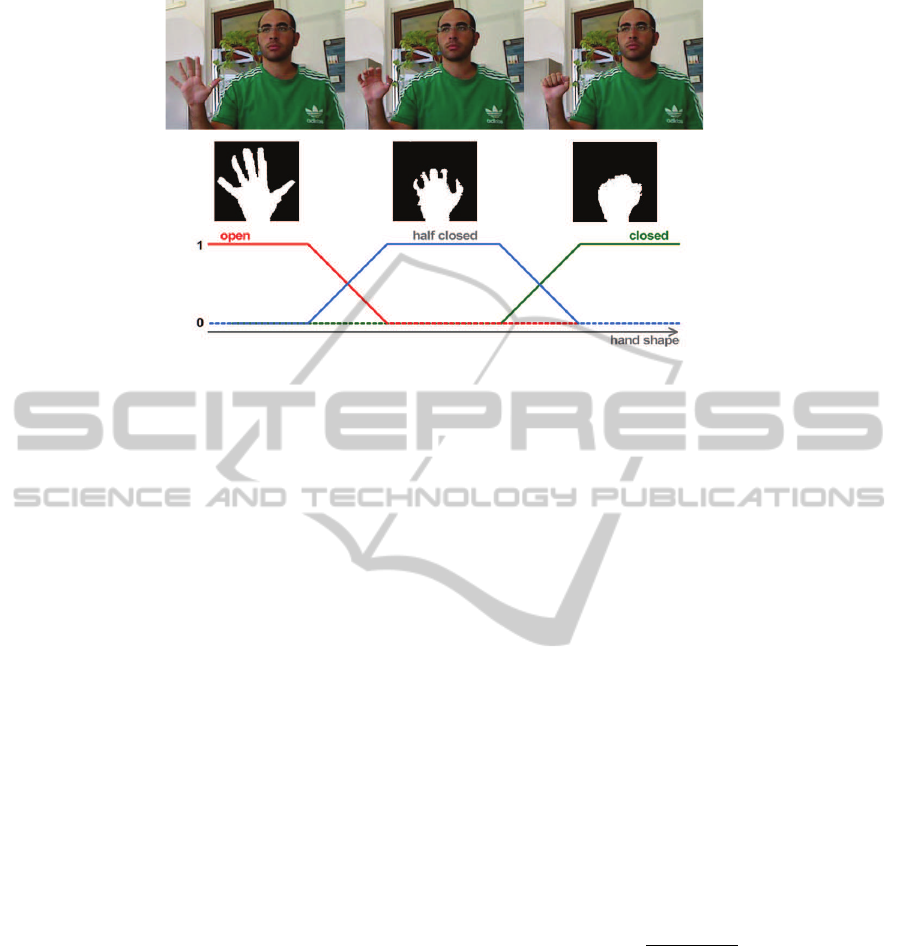
Figure 2: The gesture recognition method. For each frame (first row), the hand is detected by means of OpenNI / NITE APIs.
The coordinates of the detected hands are used to define a search window whose size is proportionally to the distance from the
Kinect. RGB-D information allow to obtain an hand mask (second row) that is described in terms of its roundness. A fuzzy
technique (third row) is finally applied to express the uncertainty about the hand shape.
in which each pixel contains the distance between the
sensor and a point in the scene, provide very useful
information about the elements of the scene, e.g., a
moving person, but range sensors used to obtain them
are very expensive.
According to the considered scenario, we found
that Kinect represents the most suitable device both in
terms of cost and functionalities since it is equipped
with ten input/output components that make it possi-
ble to sense the users and their interaction with the
surrounding environment. The Kinect sensor rests
upon a base which contains a motor that allows for
controlling the tilt angle of the cameras (30 degrees
up or down). Starting from the bottom of the device,
you can find three adjacent microphones on the right
side, while a fourth microphone is placed on the left
side. A 3- axis accelerometer can be used for mea-
suring the position of the sensor, while a led indicator
shows its state. However,the core of the Kinect is rep-
resented by the vision system composed of: an RGB
camera with VGA standard resolution (i.e., 640x480
pixels); an IR projector that shines a grid of infrared
dots over the scene; an IR camera that captures the
infrared light. The factory calibration of the Kinect
make it possible to know the exact position of each
projected dot against a surface at a known distance
from the camera. Such information is then used to
create depth images of the observed scene (i.e., pixel
values represent distances) that capture the object po-
sition in a three-dimensional space.
An example of hand tracking using Kinect comes
with the OpenNI/NITE packages.
However, the APIs are based on a global skeleton
detection method, so that the hand is defined just as
the termination of the arm and no specific information
about the hand state (e.g., an open hand vs a fist) is
provided. For this reason, such approach is useful just
as first step of our detection procedure since it allows
us to define the image area where the hand is located.
The coordinates of the detected hand are used to
define a search window, whose size is chosen accord-
ing to a heuristic rule based on the distance z from the
Kinect. In our system, the depth information is com-
bined with data acquired by the RGB camera and a
classification algorithm (Lai et al., 2011) is applied
in order to define the hand mask within the search
window. Each hand mask is then normalized with re-
spect to scale and the final binary region is described
in terms of its roundness. In particular, the roundness
of the hand is efficiently computed as the variance of
the set of distances between each point along the hand
border and the center of mass of the hand region:
σ
2
=
n
∑
i=1
(x
i
− µ)
2
n
(1)
where µ are the coordinates of the center of mass
and x are the coordinates of the n points along the
border.
This feature provides useful information for dis-
criminating between open/half open hands that have
a low-level of roundness and closed hands that result
almost round. Moreover, in order to better deal with
the uncertainty of visual features, the concept of hand
shape is modeled through a fuzzy logic rule based on
the roundness values:
IF roundness IS low THEN hand is open
IF roundness IS normal THEN hand is half closed
ImprovingUserExperienceviaMotionSensorsinanAmbientIntelligenceScenario
31

IF roundness IS high THEN hand is closed
Fig. 2 shows the steps of the recognition proce-
dure. The high-level reasoning for recognizing the
hand gesture is performed by using the output of the
fuzzy rule in conjunction with a set of grammar rules.
3.2 Gesture Language Description
As already mentioned, Kinect provides an effective
way of capturing the input from the user, which in
principle could be directly translated into commands;
however, the mere recognition of hand gestures may
prove inadequate to cover with sufficient detail the
broad spectrum of possible instructions. The fuzzy
recognizer described above, for instance, is able to tell
only two hand gestures apart and, while those could
be sufficient to translate a set of commands accord-
ing to a binary alphabet, such coding would produce
lengthy words, and would be too cumbersome to be
of any practical use.
Our goal consists in providing the users with a
tool able to let them express a (relatively) broad set
of commands, starting from elementary and custom-
ary gestures; to this aim, we regard the set of possi-
ble commands and queries as a language, which can
be precisely defined with the notation borrowed from
formal language theory.
For our purposes, we define such language by
specifying a simple grammar, expressed in the usual
BNF notation (Aho et al., 2007); from this point of
view, the hand gestures can be regarded as the sym-
bols of the underlying alphabet, assuming we can
sample the images acquired by the Kinect with a pre-
fixed frequency(i.e., we can identify repetitions of the
same symbol); moreover, we will consider an addi-
tional symbol representing a separator, corresponding
to the case when no gesture is made. The following
alphabet will thus constitute the basis for the subse-
quent discussion:
Σ = {◦, •, };
with ◦ indicating the open hand, • the fist, and the
separator; it is clear, however, that the alphabet can be
easily extended by acting on the fuzzy recognizer.
Such alphabet is used to code the basic keywords,
such as those for identifying the beginning of a state-
ment; upon this, we devised a basic grammar cap-
turing a gesture language expressing simple queries
and commands to the actuators. So for instance, the
proper sequence of gestures by the user (i.e. “• ”)
will be understood as the query keyword, represent-
ing the beginning of the corresponding statement, and
similarly for other “visual lexemes”.
The grammar we used is a context-free grammar,
which is completely defined in Backus-Naur Form
(BNF) by the following productions
1
:
P → Slist
Slist → stat | stat Slist
stat → query | cmd
query → query id [status | value]
cmd → act on id start cmdLoop stop
cmdLoop → [increase | decrease]
| [increase | decrease] cmdLoop
Despite the simplicity of the devised language, its
grammar is able to capture an acceptable range of in-
structions given by the user in a natural and unobtru-
sive way; the software running on the motion detec-
tion sensor provides the input symbols which are then
processed by our interpreter and translated into com-
mands/queries.
Such structured approach gives us also the oppor-
tunity to exploit the potentialities of the parser used
to process the visual language; in particular, as is cus-
tomary practice, our interpreter performs the recogni-
tion of an input sequence as a word of the language by
building an internal data structure which matches the
syntax of the sentence recognized so far; moreover,
in order to keep the process computationally manage-
able, a set of the next admissible input symbols is con-
structed at each step (i.e. for every input symbol).
In our system, we exploit this information in or-
der to tune the fuzzy recognizer tied to the motion
sensor by means of a weighting mechanism (Cho and
Park, 2000; Alcal´a et al., 2003). Namely, the fact that
at a given time instant only some of the possible in-
put symbols (i.e. gestures) are expected provides an
invaluable feedback which may be exploited by the
fuzzy recognizer from avoiding useless computations.
Although the effect of such feedback might appear al-
most negligible when only two different gestures are
considered, the addition of more symbols is straight-
forward in our system, and such a feedback can heav-
ily improve the efficiency of the fuzzy classifier by
preliminarily discarding inadmissible symbols. For
instance, we may conceivably consider some easily
recognizable gestures involving the use of both hands
and their relative position in order to allow the defini-
tion of a more complex grammar.
1
The sets of terminal, and non-terminal symbols, and
the start symbol are implicitly defined by the productions
themselves.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
32

4 CASE STUDY
The proposed method is part of a system aiming for
timely and ubiquitous observations of an office en-
vironment, namely a department building, in order
to fulfill constraints deriving both from the specific
user preferences and from considerations on the over-
all energy consumption.
The system will reason on high-level concepts as
“air quality”, “lighting conditions”, “room occupancy
level”, each one referring to a physical measurement
captured by a physical layer. Since the system must be
able to learn the user preferences, ad-hoc sensors for
capturing the interaction between users and actuators
are needed similarly to what is described in (Morana
et al., 2012). The plan of one office, giving an exam-
ple of the adopted solutions, is showed in Figure 3.
The devices labelled as A and B are used as a first-
level, rough, control of the user’s presence.
The sensing infrastructure is realized by means of
a WSAN, whose nodes (Fig. 3-E) are able to mea-
sure temperature, relative humidity, ambient light ex-
posure and noise level. Sensor nodes can be located
close to several points of interest, e.g., door, window,
user’s desk; moreover, nodes equipped with outdoor
sensors can also be installed on the building facade,
close to the office windows, in order to monitor out-
door temperature, relative humidity, and light expo-
sure. Actuators are able to change the state of the
environment by acting on some measures of interest.
The air-conditioning system (Fig. 3-D), the curtain
and rolling shutter controllers (Fig. 3-F, G), and the
lighting regulator (Fig. 3-I) address this task by mod-
ifying the office temperature and lighting conditions.
Both temperature and light management are funda-
mental for the energy efficiency of the office, but in
order to achieve better results a more accurate anal-
ysis of the power consumption is required. For this
reason, we used energy monitoring units for each de-
vice (e.g, air-conditioner, lights, PCs) and an energy
meter (Fig. 3-C) for the overall monitoring of each of-
fice. The users’ interaction with actuators is captured
via the Kinect sensor (Fig. 3-H) that is also respon-
sible for detecting the presence and count the number
of people on the inside of the office. An additional
contribution for detecting user’s presence is given by
video sensors integrated with wireless sensor nodes
(Fig. 3-J), that can be used to perceive high-level fea-
tures such as who is in the office.
The monitoring infrastructure is based on the IRIS
Mote produced by Crossbow, equipped with a number
of sensors (i.e., temperature, humidity, light intensity,
noise level, CO2). The IRIS is a 2.4 GHz Mote mod-
ule designed specifically for deeply embedded sensor
Figure 3: Monitored office.
networks. Other ad-hoc sensors and actuators (e.g.,
curtain reader and controller) can be connected with
the WSAN by means of standard protocols (e.g., Zig-
Bee, EIA RS-485).
The Kinect is connected to a miniature fanless PC
(i.e., fit-PC2i) with Intel Atom Z530 1.6GHz CPU
and Linux Mint OS, that guarantees real-time pro-
cessing of the observed scene with minimum levels
of obtrusiveness and power consumptions (i.e., 6W).
Several tests have been performed in order to sep-
arately evaluate both the fuzzy gesture recognizer and
the interpreter. The former has been tested under
varying lighting conditions and poses showing an ac-
ceptable level of robustness. This is mainly due to
the primary role of the depth information in detect-
ing the hand mask, while compensating for the lower
quality of the RGB data. Results showed that about
70% of the gestures (i.e., masks of the hands) are cor-
rectly classified when the user acts in a range of 1.5 to
3.5 meters from the Kinect. Greater distances make
performances worse due to the physical limits of the
infrared sensor.
The interpreter functionalities have been prelim-
inarily verified by means of a synthetic generator of
gestures allowing for the validation of both the alpha-
bet and the grammar we chose. The overall system
has been tested by conducting a set of experiments
involving 8 different individuals. Each person was
positioned in front of Kinect at a distance within the
sensor range and was asked to interact with the de-
vice by performing a random sequence of 20 gestures
chosen from a predefined set of 10 commands (i.e.,
turn on the light, turn off the light, turn on HVAC,
turn off HVAC, set the temperature, set the airflow
angle, open the door, lock the door, open the curtains,
close the curtains) and 10 queries (i.e., get the instan-
taneous energy consumption, get the monthly energy
consumption, get the list of active appliances, get the
temperature, get the humidity level, get the position
of the sensors, get the position of the actuators, get
the state of the sensors, get the state of the actuators,
get the state of the system).
ImprovingUserExperienceviaMotionSensorsinanAmbientIntelligenceScenario
33

The proposed system was able to correctly clas-
sify the input gestures in 83.75% of the cases, cor-
responding to 134 positives out of 160 inputs. Such
a result shows that compared to the standalone fuzzy
recognizer, representing the set of possible commands
and queries as a language increases the performance
of the system.
5 CONCLUSIONS
In this work we presented a system for the manage-
ment of an office environments by means of an unob-
trusive sensing device, i.e., the Kinect. Such a sensor
is equipped with a number of input/output devicesthat
make it possible to sense the user and its interaction
with the surrounding environment. We considered a
scenario where the whole environment is permeated
with small pervasive sensor devices, for this reason
the Kinect is coherently connected to a miniature fan-
less computer with reduced computation capabilities.
The control of the actuators of the AmI system
(e.g., air-conditioning, curtain and rolling shutter) is
performed by the Kinect by recognizing some simple
gestures (i.e., open/closed hands) opportunely struc-
tured by means of a grammar.
Once the hand of the user has been detected, some
local processing is done using RGB-D data and the
obtained hand region is described according to its
roundness. Such a descriptor is verified by means of
a fuzzy procedure that predicts the state of the hand
with a certain level of accuracy. Each state (i.e., open
or closed) represents a symbol of a grammar that de-
fines the corresponding commands for the actuators.
The construction of a real prototype of the moni-
toring and controlling system allowed for exhaustive
testing of the proposed method. Experimental results
showed that the system is able to perform efficiently
on a miniature computer while maintaining a high
level of accuracy both in terms of image analysis and
gesture recognition.
Although the effectiveness of the system has been
evaluated considering only two different gestures, the
addition of more symbols is straightforward. As fu-
ture work we may conceivably consider some easily
recognizable gestures involving the use of both hands
and their relative position in order to allow the defini-
tion of a more complex grammar.
ACKNOWLEDGEMENTS
This work is supported by the SMARTBUILDINGS
project, funded by POR FESR SICILIA 2007-2013.
REFERENCES
Aho, A., Lam, M., Sethi, R., and Ullman, J. (2007). Compil-
ers: principles, techniques, and tools, volume 1009.
Pearson/Addison Wesley.
Alcal´a, R., Casillas, J., Cord´on, O., and Herrera, F.
(2003). Linguistic modeling with weighted double-
consequent fuzzy rules based on cooperative co-
evolutionary learning. Integr. Comput.-Aided Eng.,
10(4):343–355.
Borenstein, G. (2012). Making Things See: 3D Vision With
Kinect, Processing, Arduino, and MakerBot. Make:
Books. O’Reilly Media, Incorporated.
Cho, J.-S. and Park, D.-J. (2000). Novel fuzzy logic control
based on weighting of partially inconsistent rules us-
ing neural network. Journal of Intelligent Fuzzy Sys-
tems, 8(2):99–110.
De Paola, A., Cascia, M., Lo Re, G., Morana, M., and
Ortolani, M. (2012a). User detection through multi-
sensor fusion in an ami scenario. In Information Fu-
sion (FUSION), 2012 15th International Conference
on, pages 2502 –2509.
De Paola, A., Gaglio, S., Lo Re, G., and Ortolani, M.
(2012b). Sensor9k: A testbed for designing and exper-
imenting with WSN-based ambient intelligence appli-
cations. Pervasive and Mobile Computing. Elsevier,
8(3):448–466.
Gulshan, V., Lempitsky, V., and Zisserman, A. (2011). Hu-
manising grabcut: Learning to segment humans us-
ing the kinect. In Computer Vision Workshops (ICCV
Workshops), 2011 IEEE International Conference on,
pages 1127 –1133.
Kean, S., Hall, J., and Perry, P. (2011). Meet the Kinect:
An Introduction to Programming Natural User Inter-
faces. Apress, Berkely, CA, USA, 1st edition.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). Sparse dis-
tance learning for object recognition combining rgb
and depth information. In Robotics and Automa-
tion (ICRA), 2011 IEEE International Conference on,
pages 4007 –4013.
Morana, M., De Paola, A., Lo Re, G., and Ortolani, M.
(2012). An Intelligent System for Energy Efficiency
in a Complex of Buildings. In Proc. of the 2nd IFIP
Conference on Sustainable Internet and ICT for Sus-
tainability.
Raheja, J., Chaudhary, A., and Singal, K. (2011). Track-
ing of fingertips and centers of palm using kinect. In
Computational Intelligence, Modelling and Simula-
tion (CIMSiM), 2011 Third International Conference
on, pages 248 –252.
Xia, L., Chen, C.-C., and Aggarwal, J. (2011). Hu-
man detection using depth information by kinect. In
Computer Vision and Pattern Recognition Workshops
(CVPRW), 2011 IEEE Computer Society Conference
on, pages 15 –22.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
34
