
Accurate Online Estimation of Battery Lifetime for Wireless Sensors
Network
Emmanuel Nataf
1,2
and Olivier Festor
2
1
Lorraine University, Vandoeuvre-l`es-Nancy, France
2
INRIA - MADYNES - Loria, Vandoeuvre-l`es-Nancy, France
Keywords:
Wireless Sensors Network, Energy Measurment, Battery lifetime, WSN430, Sky, Contiki, Cooja.
Abstract:
Battery is a major hardware component of every device in a wireless sensor network. Most of them have no
power supply and are generally deployed for a long time. Investigations have been done on battery physical
models and their adaptation to sensors. We present an adaptation and instanciation of such a model on a real
sensor operating system and how architectural constraints have been considered. Experiments have been made
in order to test the impact of several parameters on the battery lifetime.
1 INTRODUCTION
Wireless Sensors Networks (WSN) have a growing
presence in industrial and home automation. These
constrained networks are made possible by the reduc-
tion of processor size and the high performance bat-
teries. Nevertheless these networks have to take care
of their energy consumption because they are usually
deployed for a long time. The growing interest on bat-
tery lifetime estimation for WSN appears in the stan-
dardization work of these network (Ed., 2012). They
define a routing protocol with one metric being the
remaining battery level (Vasseur Ed. et al., 2012).
Battery models that describe relation between the
battery lifetime and its use have been proposed since
embedded systems (laptop, cellular phone) became
popular. These models take into account two phe-
nomenons occurring in a battery cell: the Rate Ca-
pacity Effect and the Recovery Effect (Panigrahi et al.,
2001). The former gives the energy consumed under
a constant current load, when transmitting for exam-
ple, and the latter gives the energy recovered during
inactivity or low current load. Inside a battery, oxi-
dation at the anode electrode induces reduction at the
cathode. The reduction decreases the concentration
of positive ions near the cathode and so the available
energy. But during idle time or low current load posi-
tive ions near the anode have time to move toward the
cathode, thus increasing the available energy and so
the battery lifetime.
The analytical model of this battery behaviour is
well known but is too complex to be instanciated on
a sensor board. However, an approximation of this
model is available and our contribution in this paper
is to fill the last gap between the approximated model
and its instanciation within an existing operating sys-
tem for sensors. The remainder of this paper is orga-
nized as follow. We first describe the reference model
and its approximation. The next section emphasizes
on the elementary operations of WSN node and their
current draw. Details of the implementation are given
in the section 4 and first results are shown in the last
part. We draw some conclusions and forecast future
work at the end of the document.
2 REFERENCE MODEL
The most accurate battery modeling is given by the
analytical equation (1) (Rakhmatov and Vrudhula,
2001; Rakhmatov et al., 2002; Rao et al., 2003). In
this formula, α (coulombs) denotes the total battery
capacity that is equals to the current load i(τ) – in the
left additive operand – consumed since the use of the
battery until the time L (the battery Lifetime) and –
the second operand – the current that was unavailable
because positive ion concentration was not sufficient
at the cathode. The β parameter is the diffusion coef-
ficient of electroactive species inside the battery. β
2
is
expressed in s
−1
.
α =
Z
L
0
i(τ)dτ + 2
∞
∑
m=1
Z
L
0
i(τ)e
−β
2
m
2
(L−τ)
dτ (1)
59
Nataf E. and Festor O..
Accurate Online Estimation of Battery Lifetime for Wireless Sensors Network.
DOI: 10.5220/0004312500590064
In Proceedings of the 2nd International Conference on Sensor Networks (SENSORNETS-2013), pages 59-64
ISBN: 978-989-8565-45-7
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
The use of this model can be found in (Rakhmatov
and Vrudhula, 2003; Seungki et al., 2005; Timmer-
mann, 2003; Zhang et al., 2010; Sausen et al., 2010)
for various domains, as task scheduling or simulation.
The model can not be implemented as is on WSN
nodes albeit some results with the first part of equa-
tion (1) are reported in (Dunkels et al., 2007; Kera-
siotis et al., 2010). In so doing, no work does to our
knowledge take into account the recovery effect that
occurs during idle time despite it is generally more
than 90% of the WSN node lifetime. The contribu-
tion of (Rahm´e et al., 2010) is an approximation of
equation (1) that can be implemented on WSN node.
The global equation (2) recursively computes σ(L
n
)
that is the consumed charge in Milli ampere minute
(mAmn) at time L
n
. This computation depends on the
consumed charge at time L
n−1
, the time interval, in
minute, ∆ = L
n
−L
n−1
being constant.
σ(L
n
) =
n
∑
k=1
I
k
δ
k
+ λ
σ(L
n−1
) −
n−1
∑
k=1
I
k
δ
k
!
+2I
n
A(L
n
,L
n−1
+ δ
k
,L
n−1
)
(2)
With this approach, we know the remaining charge
in the battery at time L
n
by the difference between
σ(L
n
) and the initial battery parameter α of equation
(1). The recovery effect of the battery is computed
through the function A given in the equation (3) that
is approximated by the use of an f function we detail
below.
A(L
n
,L
n−1
+ δ
k
,L
n−1
) =
∞
∑
m=1
e
−β
2
m
2
(L
n
−L
n−1
−δ
k
)
−e
−β
2
m
2
(L
n
−L
n−1
)
β
2
m
2
≃
f(ν)
β
2
−
f(∆)
β
2
(3)
This approximation depends on the idle time of the
mote during the ∆ interval, given by the difference
ν = ∆ −δ
k
(ν is the idle time of the L
n−1
period
and δ
k
its activity time). The recursivity of the
model depends on the λ parameter defined as the ratio
A(L
n+1
,δ
1
,0)
A(L
n
,δ
1
,0)
for each n but that can be bounded by the
value e
−β
2
∆
computed offline.
3 CURRENT DRAW
3.1 Linear Draw
The first term in equation (2) is the sum of products
between current load I
k
and time interval δ
k
since the
beginning of the battery lifetime (when k = 1) un-
til the time L
n
. The δ
k
time interval is a sub inter-
val of ∆ during which the battery was used by the
node. To compute this value we must know which
components of the motes use the current along the
time and at which current rate. Mote’s current infor-
mation can be obtained from data-sheet documents.
For example, the table 1 shows the current load for
two mote types (Sky or WSN430 motherboard, re-
spectively with CC2420 and CC1100 communica-
tion chips). The columns are the usual states of the
duty cycle for any mote : CPU, LPM, TX and RX
respectively for processor, low power mode, trans-
mitting and receiving. Currents are given in mA.
The given values for TX and RX are linked to sig-
nal power and throughput configuration of the mote.
We have launched experiments on the senslab plat-
Table 1: Motes current draw.
Mote CPU LPM TX RX
Sky 1.8 0.0545 17.4 18.8
Wsn430 2 0.02 16.1 15.2
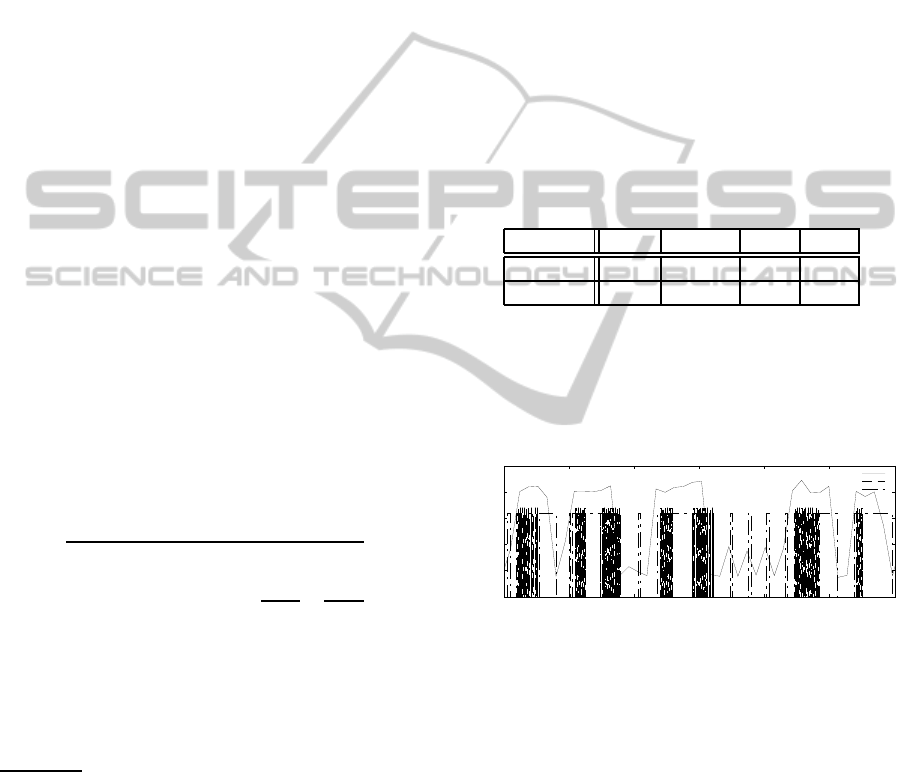
form (des Roziers et al., 2011) with one tested node
(WSN430 based). The senslab testbed provides an
external polling service of the current consumed by
motes during an experiment. We program the node to
print the time of each state change. The figure 1 shows
0
5
10
15
20
25
17 17.5 18 18.5 19 19.5 20
Current (mA)
Time (s)
external
TX
RX
Figure 1: Mote modes and currents.
plots of measured current at the mote endpoints and
the duties cycles (we just keep TX and RX mode that
have the main current values). Note that start and stop
times of duties match with measured current. Conse-
quently, the current draw of a ∆ = δ
CPU
+ δ
LPM
inter-
val is the result of the equation (4) where eachC
state
is
the current load (cf.table 1) and each δ
state
is the sum
of all state sub-intervals inside ∆.
I
k
δ
k
= C
CPU
.δ
CPU
+C
LPM
.δ
LPM
+C
TX
.δ
TX
+C
RX
.δ
RX
(4)
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
60

4 IMPLEMENTATION
CONSTRAINTS
Even with the help of (Rahm´e et al., 2010), we must
be aware of mote limitations on code size and arith-
metical capabilities. The strong constraint is that the
MSP430 compiler can not handle floating point val-
ues but only signed or unsigned integer.
4.1 Online Computation
We compute the consumed current every ∆ time inter-
val. The values δ
CPU,LPM,TX,RX
are provided in Milli
second and we use the current load of the table 1 with
a factor of thousand. The result’s unit is in µA.ms then
it is converted in mA.mn (cf eq. (2)). We compute ν
with the low power mode period and the radio use :
ν =
δ
LPM
−(δ
TX
+ δ
RX
) if δ
LPM
> (δ
TX
+ δ
RX
)
0 else
(5)
If the radio is more used than the LPM state then there
is no idle time for the battery. The varying part of the
recovery function A (equation 3) is rewritten in order
to lose as little precision as possible :
f(ν)
β
2
=
10
4
β
2
ν+ π
2
2.10
3
−12β
√
π
√
ν
β
2
12.10
5
(6)
At this step we use a 64 bits intermediary value to get
the result (MSP430 compiler allows such data type
but they are actually emulated with several 32 bits val-
ues).
Finally, the remaining energy is computed with
the values above and the previous remaining energy
value (a ∆ before). We compute the ratio with 255
as 100%. This value is given by a WSN routing met-
ric recommendation (Vasseur Ed. et al., 2012) and
we use it in the present work to implement and test an
energy-based routing plane. However we compute the
remaining energy with a precision of 5 numbers, that
is from 255.10
5
, so energy consumption is measured
at a very fine granularity.
The code size of the presented implementation is
about 12Kb out of the 50Kb allowed by our sensor
board. At the memory level, we store on memory
six 32 bits values from one computation to the other
(times of CPU, LPM, TX, RX and previous values for
σ(L
n−1
) and
∑
n−1
k=1
I
k
δ
k
).
5 SIMULATION RESULTS
For our simulations we use the Cooja WSN simulator
(Osterlind et al., 2006) and test a network of nodes
built on the Sky mote platform. All node have an ini-
tial battery charge of 880mAh, that give a value for α
of 880 = 52800mAmn because we consider an ideal
battery for these first steps. For the same reason, we
choose the value β = 1.
Nodes use IPv6 and the RPL
1
routing protocol
(Ed., 2012) to perform a simple collect application
during which one or more nodes, the Senders, pe-
riodically send sensing information to a receiving
node called the Sink, configured to be the root of the
RPL routing tree. Senders send one data packet ev-
ery second and use the contikiMAC radio duty cycle
(Dunkels, 2011). We use a linux Ubuntu 11.0 desk-
top computer with a 3GHz Intel processor and 4Gb of
memory to run simulations.
5.1 Booting Node
We start our experiment with the observation of the
node booting process. The figure 2 puts together the
evolution of the battery lifetime and the time spends
by activities of the node. During the first minute, on
the part (a), we note a large decrease of the battery
2
to
correlate with the strong activity on the part (b) for the
same period. Mainly this activity is related to system
and network initialization (remains the strong power
for TX and RX of the table 1). The battery recovery
is visible at this very detailed level, during the second
minute and the two following ones. These recovery
periods match with low activity periods.
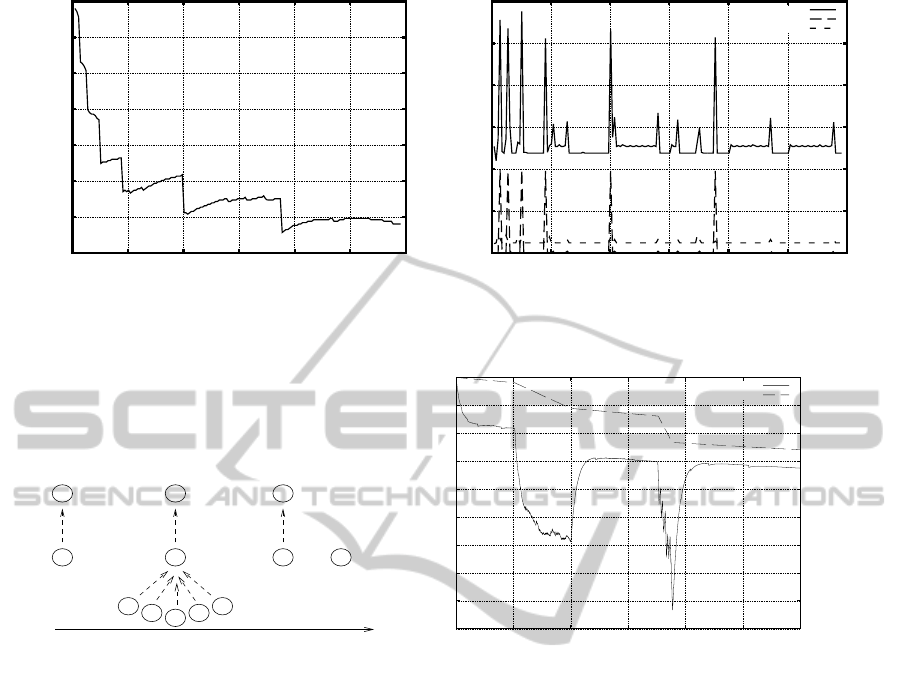
5.2 Network Building
We continue the simulation shown in the figure 3 (a)
where after ten minutes of simulated time, we add
five nodes “under” the non-root node to observe the
cost of the routing tree building and traffic accumula-
tion. The node 1 is the Sink and all other are Sender.
We leave these nodes sending and forwarding (only
for the node 2) data packets during ten minutes and
remove the five nodes previously added. This can
occurs in real deployement for example with mobile
nodes or with lossy communication environment. A
final point of interest, at the thirty fifth minute, is
when a node has lost its destination node (its default
next hop router) because the network has to build it-
self again. The figure 3(b) plots the remaining bat-
tery lifetime of the node 2 along our experiment. The
recovery
curve is related to the implementation and
the
linear
is a simple additive function of current
draw. The strong decrease of the first ten minutes is
mainly due to traffic overhead and very few is from
1
Routing Protocol for Low-Power and Lossy Network
2
that is only 0.0005% of the total
AccurateOnlineEstimationofBatteryLifetimeforWirelessSensorsNetwork
61
99.9993
99.9994
99.9995
99.9996
99.9997
99.9998
99.9999
100
0 1 2 3 4 5 6
Battery lifetime (%)
Time (mn)
0
50
100
150
200
250
300
0 1 2 3 4 5 6
Duties schedule (ms)
Time (mn)
CPU
TX
RX
(a) (b)
Figure 2: First minutes of battery lifetime.
1
2
1
2
4 6
3 7
5
1
2 2
Time (mn)
0 10 20 35
99.55
99.6
99.65
99.7
99.75
99.8
99.85
99.9
99.95
100
0 10 20 30 40 50 60
Battery lifetime (%)
Time (mn)
recovery
linear
(a) (b)
Figure 3: Battery lifetime and RPL.
RPL control messages. Once the routing plane is es-
tablished, between the tenth and twentieth minute, the
battery decreases with a greater slope and with more
micro variations. When removing nodes at the twen-
tieth minute, the node 2 shows a quick and strong re-
covery of its battery lifetime. As given by the model,
the fall of current draw lets the battery recovers some
of its current charge. During the fifteen following
minutes the node sends one packet per second to the
Sink and the curve is similar to the beginning (with-
out booting process) but at a lower battery level. At
the thirty fifth minute we remove the parent of the
node 2. The very large decrease of battery is again
mainly related to a strong use of communication. The
node has no more IPv6 router neighbor then it polls
the network with neighbor discovery messages and
after three minutes, the node decides to build a new
network and just send few RPL control message. One
can there observe a very significant recovery at the
part (b). The linear model is very less reactive and
never grows, as expected. It generally over estimates
the lifetime and it does not take into account the re-
covery effect.
5.3 Radio Duty Cycle
The Contiki operating system supports some RDC
implementations we have used in order to compare
their energy consumption. The part (a) of figure 4
shows these experiments. All these RDC are asyn-
chronous and packet oriented.
• the contikiMAC allows the greatest battery life-
time. It can sleep up to 99% of the time and was
measured as been ten times less energy consumer
than X-MAC (Dunkels, 2011).
• X-MAC (Buettner et al., 2006) is a bigger con-
sumer; the sender sends several preamble packets
until an acknowledge reception and then sends the
data packet.
• CX-MAC (Compatibility X-MAC) is a variation
of X-MAC that is provided by Contiki to be usable
on more radio chips.
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
62

0
20
40
60
80
100
0 5 10 15 20 25 30
Battery lifetime (%)
Time (day)
contikiMAC
X-MACCX-MACsicslowMAC
60
65
70
75
80
85
90
95
100
0 5 10 15 20 25 30
Battery lifetime (%)
Time (day)
60
20
12
2
(a) (b)
Figure 4: Network life.
• sicslowMAC (also in Contiki) handles 802.15.4
frames and always keeps its radio open.
As one can expect, RDC has a strong effect on the
battery lifetime and this effect is mainly due to the
use of radio of each RDC.
5.4 Throughput
We have also measured the throughput effect on bat-
tery lifetime and plot them in part (b) of the figure
4. The contikiMAC RDC was used because it is the
less battery consuming stack and so the impact of
the throughput is emphasized. Numbers within the
part (b) are the throughput of the application, from 60
packets by minute (pkts/mn) to 1. Each packet has a
size around 100 bytes and the application is parame-
terized by a number of seconds between two packets.
These results show that the lifetime is roughly linear
with the throughput but other tests with less through-
put than 1pkt/mn have no significant improvement
on the lifetime. The network traffic is then negligible
compared to sensor base activity (indeed the routing
protocol is the main radio consumer).
5.4.1 Lifetime Estimation
These figures are very close to a line and we use a
linear regression with the least square estimation tech-
nique to envisionthe time when the battery is depleted
(i.e. with 0% of remaining energy). Table 2 contains
the battery lifetime estimation for each lines in figure
4. The short lifetimes of these networks (no more than
four months) is related to the light battery we have
used. Battery of node like Sky are usually around
2000mAh and should allow WSN be operational for
one year. Nevertheless real batteries have a secure cut
off level that prevent them to be fully discharged be-
cause they will be damaged and not able to be charged
again.
Table 2: Battery life estimation.
RDC Lifetime
(days)
contikiMAC 128
X-MAC 30
CX-MAC 26
sicslowMAC 1.8
Thgput : 1pkt/mn
Thput Lifetime
(pkts/mn) (days)
60 77
20 105
12 113
2 124
RDC : contikiMAC
6 CONCLUSIONS
We presented a first implementation of a battery life-
time estimation inside an existing operating system
for WSNs. Based on a recognized theoretical battery
model, our work has shown how the sensor internal
architecture impacts concrete realizations. Our simu-
lations help us to better understand how sensors use
their battery in the bootstrap process or during steady
networking phase. This work is useful for many ap-
plications like routing optimization that we currently
plan. The necessary additional work is to get the im-
plemented model and the real world closer tied. Dis-
charge tests of batteries must be done as precisely
as possible (manufacturer data-sheets are not always
enough) to parameterize the α and β values of the bat-
tery used. Such tests should be done at several ambi-
ent temperature level because it is know that it acts
on battery lifetime. The sensing chips (temperature,
light...) are also current consumer and some sensors
have energy scavenging capabilities that should be in-
tegrated into the model. We have to launch long time
testing (few weeks, months, one year) establishing a
AccurateOnlineEstimationofBatteryLifetimeforWirelessSensorsNetwork
63

relation between the remaining energy and the cut off
level of a battery. Moreover several battery technolo-
gies have to be tested to enforce our implementation
model.
REFERENCES
Buettner, M., Yee, G. V., Anderson, E., and Han, R. (2006).
X-mac: a short preamble mac protocol for duty-cycled
wireless sensor networks. In Proceedings of the 4th in-
ternational conference on Embedded networked sen-
sor systems, SenSys ’06, pages 307–320, New York,
NY, USA. ACM.
des Roziers, C., Chelius, G., Ducrocq, T., Fleury, E.,
Fraboulet, A., Gallais, A., Mitton, N., Noel, T.,
Valentin, E., and Vandaele, J. (2011). Two demos us-
ing senslab: Very large scale open wsn testbed. In In-
ternational Conference on Distributed Computing in
Sensor Systems and Workshops (DCOSS), pages 1–2.
Dunkels, A. (2011). The contikimac radio duty cycling pro-
tocol. SICS Technical Report T2011:13 ISSN 1100-
3154, Swedish Institute of Computer Science.
Dunkels, A., Osterlind, F., Tsiftes, N., and He, Z. (2007).
Software-based on-line energy estimation for sensor
nodes. In Proceedings of the 4th workshop on Em-
bedded networked sensors, EmNets ’07, pages 28–32,
New York, NY, USA. ACM.
Ed., T. W. (2012). Rpl: Ipv6 routing protocol for low-power
and lossy networks. RFC 6550, Internet Engineering
Task Force.
Kerasiotis, F., Prayati, A., Antonopoulos, C., Koulamas, C.,
and Papadopoulos, G. (2010). Battery lifetime predic-
tion model for a wsn platform. In Fourth International
Conference on Sensor Technologies and Applications
(SENSORCOMM), pages 525 – 530. IEEE.
Osterlind, F., Dunkels, A., Eriksson, J., Finne, N., and
Voigt, T. (2006). Cross-level sensor network simu-
lation with cooja. In Local Computer Networks, Pro-
ceedings 2006 31st IEEE Conference on, pages 641 –
648.
Panigrahi, D., Dey, S., Rao, R., Lahiri, K., Chiasserini, C.,
and Raghunathan, A. (2001). Battery life estimation
of mobile embedded systems. In Proceedings of the
The 14th International Conference on VLSI Design
(VLSID ’01), VLSID ’01, pages 57 – 63, Washington,
DC, USA. IEEE Computer Society.
Rahm´e, J., Fourty, N., Al Agha, K., and Van den Boss-
che, A. (2010). A recursive battery model for nodes
lifetime estimation in wireless sensor networks. In
Wireless Communications and Networking Confer-
ence (WCNC), pages 1 – 6. IEEE.
Rakhmatov, D. and Vrudhula, S. (2001). An analytical
high-level battery model for use in energy manage-
ment of portable electronic systems. In Computer
Aided Design, 2001. ICCAD 2001. IEEE/ACM Inter-
national Conference on, pages 488 – 493.
Rakhmatov, D. and Vrudhula, S. (2003). Energy manage-
ment for battery-powered embedded systems. ACM
Trans. Embed. Comput. Syst., 2(3):277–324.
Rakhmatov, D., Vrudhula, S., and Wallach, D. (2002). Bat-
tery lifetime prediction for energy-aware computing.
In Proceedings of the 2002 International Symposium
on Low Power Electronics and Design (ISLPED’02),
pages 154 – 159. ACM.
Rao, R., Vrudhula, S., and Rakhmatov, D. (2003). Battery
modeling for energy aware system design. Computer,
36(12):77 – 87.
Sausen, P. S., Spohn, M. A., and Perkusich, A. (2010).
Broadcast routing in wireless sensor networks with
dynamic power management and multi-coverage
backbones. Inf. Sci., 180(5):653–663.
Seungki, H., Daeyoung, K., and Jae-eon, K. (2005). Bat-
tery aware real time task scheduling in wireless sen-
sor networks. In 11th IEEE International Conference
on Embedded and Real-Time Computing Systems and
Applications, pages 269 – 272. IEEE.
Timmermann, D. (2003). Simulation of mobile wireless
networks with accurate modelling of non-linear bat-
tery effects. In In proceedings of Applied simulation
and modeling (ASM).
Vasseur Ed., P., Kim Ed., M., Pister, K., Dejean, N., and
Barthel, D. (2012). Routing metrics used for path cal-
culation in low-power and lossy networks. RFC 6551,
Internet Engineering Task Force.
Zhang, J., Ci, S., Sharif, H., and Alahmad, M. (2010). An
enhanced circuit-based model for single-cell battery.
In Applied Power Electronics Conference and Exposi-
tion (APEC), 2010 Twenty-Fifth Annual IEEE, pages
672 – 675.
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
64
