
Energy Analysis of a Real-time Multiprocessor Control of Idle States
Jabran Khan, Sébastien Bilavarn, Khurram Bhatti and Cécile Belleudy
Laboratoire d'Electronique, Antennes et Télécommunication, Université de Nice, Sophia Antipolis, France
Keywords: Linux, Low Power, DPM.
Abstract: This paper focuses on the analysis of a dynamic low power switching technique called assertive dynamic
power management (AsDPM) on ARM based platforms. The availability of ready tasks during the
execution of a program is random. The choice to when exactly a ready task is executed on certain processor
and how many processors are required for the remaining tasks can save a significant amount of energy
utilization. This paper focuses on the energy efficiency of AsDPM strategy for real-time tasks, which
decides when exactly a ready task shall execute; thereby reducing the number of active processors, which
eventually reduces energy consumption. We will analyze the energy gains resulting from the
implementation of this AsDPM power strategy for different ARM based multiprocessor platforms
(ARM1176JZF-S, CortexA9). Results show significant amounts of gains up to 60% for different execution
conditions*.
1 INTRODUCTION
As applications are becoming more and more
complex, processing power is continuously
increasing having a significant impact on embedded
device battery life. The battery technology has not
been able to match the advancement race in modern
hardware devices, therefore puts more burden on
implementation of new algorithms to cope with the
demand. Dynamic power switching (DPS) that is the
selective shutdown of system components that are
idle or underutilized, has proven to be an effective
technique for reducing power dissipation in such
scenarios.
This paper presents a power optimization study
for real-time embedded applications on ARM based
platforms. Our goal is to implement a power
management strategy on real development platforms
in order to analyze and evaluate its operational
behaviour. The work will mainly focus on finding
out the conditions for energy gains for different
platforms. An assertive dynamic power management
(AsDPM) technique proposed by (Bhatti, 2009) is
shown to be able to bring significant energy savings,
while satisfying real time constraints for different
applications. In this paper, we analyze the potential
of AsDPM across different platforms based on
recent generations of ARM processors. The
availability to monitor the actual core power
consumption inspired us to use the ARM based
platforms in our work. We will also analyze the
AsDPM strategy in different platform configurations
(i.e. 2, 3 and 4 processors), to observe the efficiency
of the strategy in a real multiprocessor environment.
The paper addresses these issues in the following
manner. Section 2 state previous work and
investigation efforts in energy and power
management. Section 3 is divided into three parts;
Section 3.1 explains briefly the AsDPM strategy and
test applications used for the experiments, Section
3.2 puts light on different platforms used (i.e.
ARM1176JZf-S, QEMU) and Section 3.3 focuses on
the implementation of AsDPM on these platforms.
In section 4, we detail the results and analyze the
conditions of energy gains based on real measures
and in section 5 we present our conclusions and
future perspectives.
2 STATE OF ART
Research has been focused on estimating power and
energy consumption using system level events
*
This work is carried out under the COMCAS project (CA501), a project labeled within the framework of CATRENE, the EUREKA
cluster for Application and Technology Research in Europe on NanoElectronics.
125
Khan J., Bilavarn S., Bhatti K. and Belleudy C..
Energy Analysis of a Real-time Multiprocessor Control of Idle States.
DOI: 10.5220/0004314001250130
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2013), pages 125-130
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

(Joseph and Martonosi, 2001), event counters
(Benini et al., 1998) or at the instruction level
(Tiwari, 1994). However, allowing OS and related
software to gain control over power is really gaining
more and more interest these days, as energy
reduction is one of the prime concerns in embedded
systems. At the processor level, two popular
techniques are mainly employed: Dynamic Power
Switching (DPS) to switch off the power supply of a
part of the circuit (Benini et al., 2000), and Dynamic
Voltage and Frequency Scaling (DVFS) to tune a
processor clock speed and its corresponding voltage
according to the requirements such as the workload
(expected or actual) or the battery charge. Usually,
the techniques based on DVFS are widely used to
reduce power and energy consumption while DPS is
used to solve thermal dissipation problems (Yang et
al. 2009). (Benini and Micheli, 1997), as well as
(Irani, Shukla and Gupta, 2003) have presented
research on evaluating DPS techniques at processor
level. Similarly, (Hwang and Wu, 2001) used a
regressive analysis of the running tracks that rely on
task activity prediction, to put hardware in sleep
mode when possible.
Microprocessor manufacturers have provided
different solutions to make use of the DPS and
DVFS techniques. For example, (ARM, 2006)
provided a policy manager called Intelligent Energy
Manager (IEM), which handle system configuration
according to the actual and/or predicted workload.
(Intel, 2004) proposed a similar technology
Enhanced Intel SpeedStep (EIST), that is integrated
in the Pentium M-series processors to manage
power. A variety of power management strategies
are also available today in popular operating systems
to control the power consumption of the CPU and its
devices. For example Linux OS, by the help of
ACPI, provides governors to use DPS and DVFS
techniques. Similarly in Windows OS, we have
different schemes (Max Battery, Performance, etc.)
to manage power and energy, with the help of ACPI.
These strategies have an advantage of being
applicable in all cases (general purpose), but the
drawback is probably a certain level of inefficiency.
Most of these strategies are defined on the basis of
overall workload on which their efficiency varies.
However, there are very few techniques that provide
power management within an application while it is
executing.
The use of application specific power
management strategy provides an extra room for
power management by utilizing the idle time more
efficiently. (Cheng and Goddard, 2006) showed that
DPS techniques achieve energy conservation in
embedded computing systems by selectively putting
its components into power-efficient states, sufficient
to meet functional requirements. In our work, we
will implement a DPS based AsDPM technique, that
mainly considers the processors for power and
energy consumption, during execution of a certain
application. It works on the principle of admission
control for ready tasks by delaying the execution of
ready tasks as much as possible. This controls the
maximum number of active/running processors in
the system at any time instant. Next section details
the implementation of this technique.
3 AsDPM IMPLEMENTATION
In this section, we describe a real implementation of
a power management strategy called AsDPM for
multiprocessor low power scheduling. With this
implementation, experiments and simulations have
been carried out with mainly two objectives in mind.
(a) To compare the efficiency and behavior of our
real ARM1176JZF-S platform with the virtual
QEMU_ARM1176 platform, (b) To implement our
strategy on multiprocessor platforms to verify the
feasibility and correctness of our AsDPM strategy
on different multi-core platforms.
3.1 AsDPM Strategy and Test
Applications
AsDPM strategy is DPS based power strategy in
which the number of processors to use, depends
upon the amount of remaining tasks and their
deadlines. AsDPM technique exploits the idle time
intervals within an application. Conventional DPS
techniques can exploit idle intervals only once they
occur on a processor. Upon detecting idle time
intervals, these techniques decide whether to
transition target processor(s) to power-efficient state.
AsDPM technique, on the other hand, aggressively
extracts most of the idle time intervals from some
processors and clusters them on some other
processors of the platform to elongate the duration
of idle time.
At every scheduling event, the strategy performs
a test of whether the remaining tasks to be executed
are schedulable on either one processor, two or more
processors. The required numbers of processors for
the remaining tasks are calculated based on this test.
Afterwards the highest priority task using EDF
scheduler (having shortest deadline) is allocated to
the first processor and so on. If system requires only
one processor, the second highest priority task is
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
126

executed on the same processor after finishing the
first one. If system requires two processors, the first
higher priority task is executed on the first
processor, the second priority task on second and
similarly the process goes on until the completion of
the remaining tasks. By this way we execute our
program on the least number of processors required,
hence minimizing the energy utilization. At the end
as higher priority tasks finish earlier, meaning the
one on processor one will complete earlier.
Therefore when a scheduling event occurs, the task
on second processor is moved to the first processor
for its completion. Hence we minimize the total
number of needed processors after each scheduling
event as well as at the end.
To evaluate AsDPM strategy in the real
implementation world, we have used four test
applications and three different platform
configurations. Example.1 and the video encoder
H.264 example consists of four tasks running on two
processor configuration. Example.3 contains six
tasks to be executed on three processors and
Example.4 contains eight tasks and needs four
processors. We used an ARM1176JZF-S based real
platform and two QEMU (Gligor et al., 2010) based
virtual platforms to test the scheduler. However the
virtual platforms should not be confused with high
level application simulators. The QEMU based
virtual platforms used in our work are provided by
our COMCAS project partners TIMA labs. The
virtual platforms (QEMU_ARM1176 and
QEMU_CortexA9) performance and functionalities
match to those of the real hardware platform
baseboards.
3.2 Platforms used
We have used in total three platforms to study the
energy behavior of AsDPM. The first one is a real
ARM1176JZF-S platform and the two others are
QEMU based virtual platforms: one composed of
ARM1176 processors and other of CortexA9
processors. We used the virtual platforms due to the
unavailability of platforms supporting multi-core
execution and processor power measurement
features at the same time. The latest embedded
Linux (2.6.33) is used as an operating system for the
platforms. The programs are compiled using the
code sorcery cross compiler for the target platforms.
The code is compatible on both real hardware and
virtual platforms. Similarly it can be used and run by
any other platform using Linux OS by cross
compiling for that specific platform. However such
systems (Laptops, PCs etc.) do not allow access to
the real time processor power utilization (energy
consumption could not analyzed).
To evaluate our strategy, we first experimented
an EDF scheduler using a mono-processor platform
with power measurement facilities (ARM1176JZF-
S) in order to compare with an identical virtual
platform, and to quantify the accuracy of QEMU
power estimations. Afterwards, we used two virtual
platforms in multi-core configurations (ARM1176,
CortexA9) to evaluate the energy gains in multi-core
execution scenarios. We will analyze and compare
the percentage energy gains with and without our
strategy implementations. As an illustration the
energy consumed by our applications using EDF
scheduler is compared with the energy consumed by
the applications with our AsDPM strategy.
3.2.1 ARM1176JZF-S
The platform baseboard PB ARM1176JZF-S
contains an ARM1176JZF-S core and a Virtex-4
XC4VLX40 FPGA. It also contains the Intelligent
Energy management (IEM) technology which is in
charge of controlling the power supply. The
platform baseboard also contains the main memory
system i.e. 128MB of 3bit wide Mobile DDR RAM,
8MB of 32-bit PSRAM and two 64MB of 32-bit
NOR flash, bus control (AMBA AXI) and other
peripherals with their controllers (implemented on
the FPGA). The ARM1176JZF-S processor has a
maximum frequency of 265 MHz It also contains
built-in registers connected directly to processor to
monitor core current and voltage hence the power
consumption of the main core. A Linux driver has
been developed in order to poll these registers at
regular interval of times and provide reliable power
consumption profiles.
3.2.2 QEMU Platforms
QEMU is a generic and open source machine
emulator and Virtualizer. When used as a machine
emulator, QEMU can run the OS and programs
made for one machine (e.g. on PC) on a different
machine (e.g. an ARM board). In our case, we have
two virtual platform configurations namely
QEMU_ARM1176 and QEMU_CortexA9.
QEMU_ARM1176 matches the specifications of a
real ARM1176JZF-S platform whereas
QEMU_CortexA9 matches the specifications of the
ARM CortexA9 platform. The processor frequency
along with the corresponding power levels with and
without load are shown in Table 1. These values
have been derived directly from the real measures on
an ARM1176JZF-S PB and on a Snowball platform
EnergyAnalysisofaReal-timeMultiprocessorControlofIdleStates
127
with Dual Cortex A9 (ST-Ericson, 2011). The
differences in power consumption, shown in table 1,
also affect the energy consumption by the platforms.
The platform characteristics plays an important role
in overall energy gains as discussed in detail by
(Khan and Bilavarn, 2012).
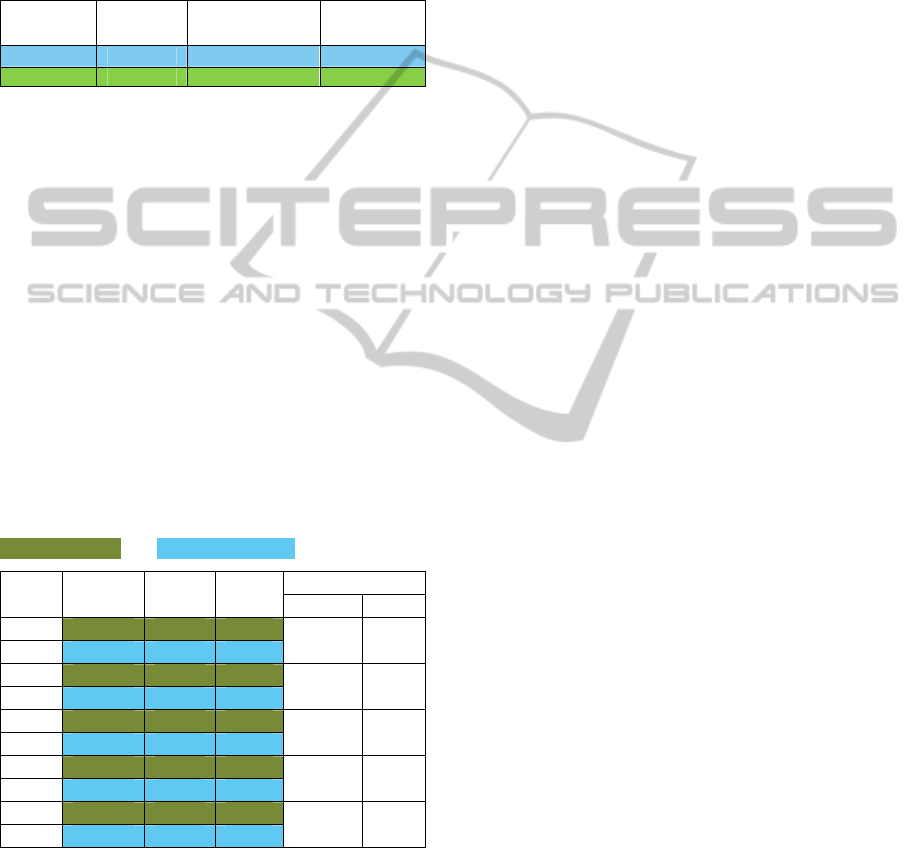
Table 1: Power consumption for QEMU_ARM1176 and
QEMU_CortexA9 platforms.
QEMU Frequency Power (No Load) Power (Load)
Platforms MHz mWatt mWatt
ARM1176 265 252 330
CortexA9 1000 90 320
The availability of the Linux CPUIdle governor
allows DPS switching in ARM1176JZF-S platform,
however, QEMU platforms allows DPS and power
consumption estimates using its own customizable
drivers. We have thus developed a control driver
PM_Driver to change the required processor state to
our desired level (i.e. Idle, Sleep, Running) and
PM_Monitor driver to monitor power and energy. A
test example is executed on both real ARM1176JZF-
S and QEMU_ARM1176 platform before
implementing the AsDPM strategy in a multi-
processor configuration. The example application is
similar to those used for analyzing the AsDPM
strategy later on. The actual execution (AET) of the
test example was changed from best case to worst
case. The energy and timing results for both
platforms are summarized in Table 2.
Table 2: Energy and Performance Analysis of real
ARM1176JFZ-S and QEMU_ARM1176 platform.
AET
Energy Time Power % Error
mJ ms mW Energy Time
Conf 1 2730.72 309.99 8.809
0.31 0.034
2722.29 308.93 8.812
Conf 2 2792.58 317.05 8.808
0.31 0.034
2783.96 315.96 8.811
Conf 3 2801.42 318.05 8.808
0.31 0.023
2792.77 317.00 8.810
Conf 4 2810.25 319.02 8.809
0.31 0.023
2801.58 317.96 8.811
Conf 5 2819.09 309.99 8.810
0.31 0.011
2810.39 318.96 8.811
Analysis proved that both the platforms showed
similar behavior in terms of energy consumption and
performance. There was a negligible error of 0.03%
in timing analysis. Similarly, the energy consumed
was also similar on both platforms with an error or
0.31% (8 to 10 milli joules that can be neglected).
3.3 AsDPM Implementation and
Energy Measurements
In order to implement the AsDPM strategy on the
considered platforms, a PM_Scheduler program
(containing AsDPM strategy) is loaded to the
platforms. The drivers to choose between different
power C-states and to monitor power and measure
energy are also loaded at the start of this program.
The PM_Monitor driver was also able to measure
the instantaneous power consumption and the mean
power between two defined points (i.e. from the start
of simulation to end). Consequently it can also
derive the corresponding energy consumption. When
the entire execution of the test application (i.e.
Example.1, 2, 3 or H264 encoder etc.) is completed,
the power management program PM_scheduler calls
the PM_Monitor driver to stop and return the mean
power and energy by the processor(s) to the console.
The measured values are stored in a file for future
analysis.
To experiment with the AsDPM strategy, we will
first implement three test examples (Example.1,
Example.2 and Example.3) in order to analyze the
energy and application behavior in different multi-
core configuration (2, 3 and 4 processors).
Afterwards we will use the H.264 encoder examples
on both platforms in order to measure and analyze
energy gains for the video encoder. The examples
used are based on the algorithm defined by (Bhatti,
2009). In our work, we focus on analyzing the
behavior of the AsDPM strategy on different
platforms, the parameters affecting the energy gain,
and compatibility with different multi-core
configurations. Therefore we will not detail the
example structure in our work. However some of the
application parameters are listed on which the
energy gain depends like worst case execution time
(WCET), Actual execution time (AET), Best case
execution time (BCET) etc. We have used variable
length example applications as the total execution
time does not affect the overall energy consumption.
4 RESULTS
We started implementing our examples on both
QEMU_ARM1176 and QEMU_CortexA9 platforms
by varying our actual execution time (AET) from
best case execution time (BCET) to worst case
execution time WCET. By this means, we can have
a range of minimum and maximum energy gains for
our strategy. In Example.1, the tasks are defined in
such a way that the first two tasks are parallel and
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
128
the third and fourth tasks are randomly chosen. By
this way the Example.1 requires two processors for
execution at the beginning. Afterwards the
PM_Scheduler takes the decision of either using one
or two processors for the remaining tasks by
minimizing the number of processors. The
percentage energy gain with and without our
AsDPM strategy is shown in Figure 1 for both
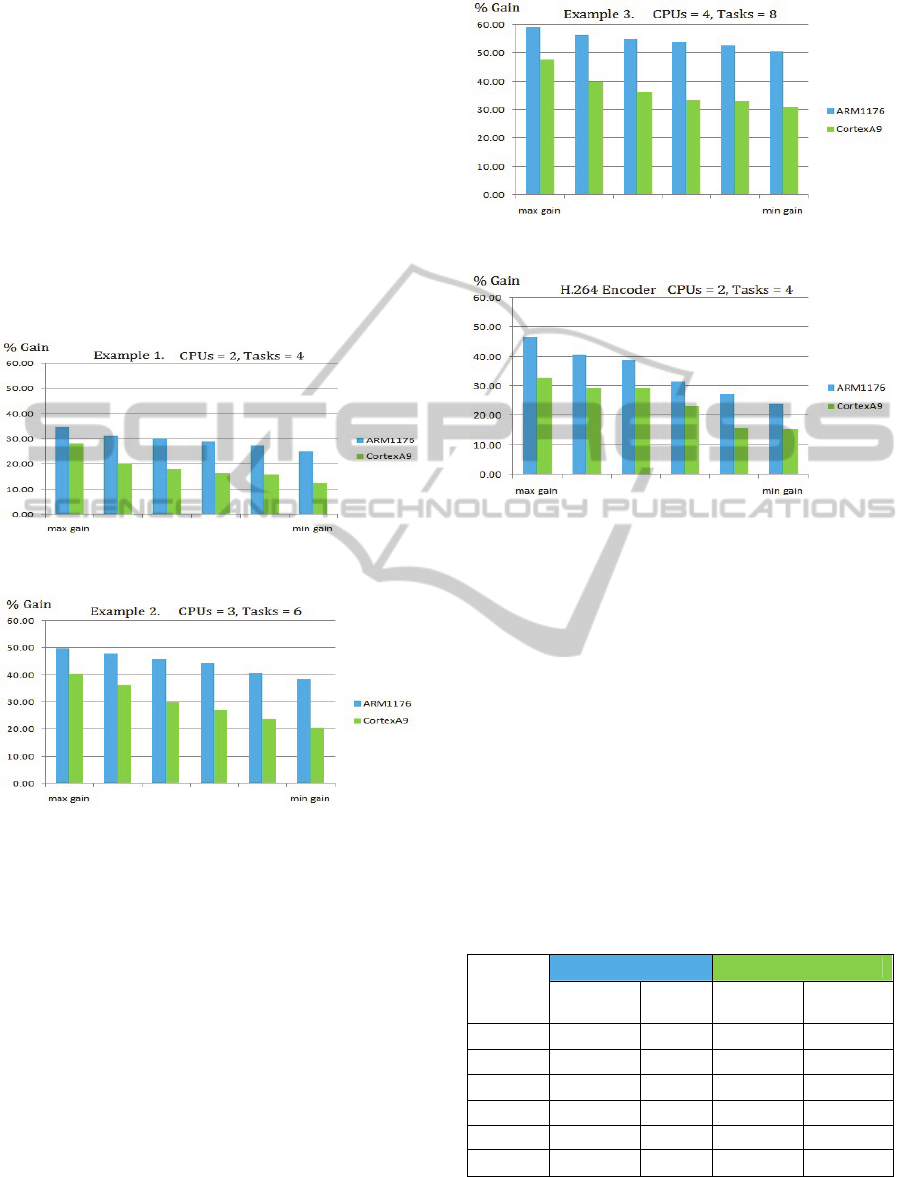
platforms. Figure 1, shows the results of the
implementations of Example.1 on both
QEMU_ARM1176 and QEMU_CortexA9
platforms. The energy gains are between 24.88% to
34.67% for QEMU_ARM1176 and 12.58% to
28.11% for QEMU_CortexA9 platform.
Figure 1: Percentage Energy gain for Example 1.
Figure 2: Percentage Energy gain of Example 2.
Figure 2 shows the energy gain of Example.2 for
both platforms. It consists of 6 tasks executed on
platform configuration having three processors.
Results show energy gains ranging between 38.65%
to 49.88% for QEMU_ARM1176 and between
20.51% to 40.55% for QEMU_CortexA9 platform.
Similarly, figure 3 shows results of Example.3
having eight tasks implemented on platform having
four processors. Percentage energy gain ranges
between 50.64% to 59.18% for QEMU_ARM1176
and between 30.95% to 47.69% for
QEMU_CortexA9 platform. We have therefore
shown the compatibility of AsDPM strategy for
different multi-core scenarios (up to 4 processors).
The results provided significant energy gains as
well.
Figure 3: Percentage Energy gain of Example 3.
Figure 4: Percentage Energy gain of H.264 Encoder.
In Figure 4, savings for an H.264 encoder
containing four tasks implemented on two processor
configuration is shown. The percentage energy
energy gain ranges between 24.05% to 46.73% for
QEMU_ARM1176 platform and 15.32% to 32.72%
for QEMU_CortexA9 platform.
It should be noted that the percentage energy
gains are higher in case of QEMU_ARM1176
platform in comparison to QEMU_CortexA9
platform. The reason is related to the operating
points of the ARM1176 core (Idle vs. Load power
level). Table 3, provides few results obtained by
changing AET for the H.264 encoder example for
both platforms.
Table 3: Energy consumption of H.264 encoder on
QEMU_ARM1176 and QEMU_Cortex A9 Platforms
AET
QEMU_ARM1176 QEMU_CortexA9
Energy
(mJ)
%
Gain
Energy
(mJ)
% Gain
Conf 1 7350.12 5080.23
3915.76 46.73 3417.94 32.72
Conf 2 7866.55 5746.56
4660.13 40.76 4052.16 29.49
Conf 3 8022.68 6461.38
6092.99 24.05 5471.44 15.32
Results show the total energy consumed by the
H.264 encoder example, with and without the
EnergyAnalysisofaReal-timeMultiprocessorControlofIdleStates
129

AsDPM strategy. QEMU_ARM1176 consumes
more power while the processor is in running state
whereas QEMU_CortexA9 consumes much less
power (Table 1). The difference between load power
and idle power of both platforms explains the
differences in percentage energy gains. If a
processor on one platform consumes more power
while executing certain application than on another,
it will provide more power savings when it is idle as
shown in Table 3. However in terms of total energy
consumption by an application, the QEMU_Cortex
platform is more efficient. As an illustration, the
total energy consumption of H.264 Encoder for
QEMU_ARM1176 with and without AsDPM
strategy is 6.62 Joules and 8.02 Joules respectively.
However the same energy consumption for
QEMU_CortexA9 platform was 5.7Joules and 6.2
Joules (much lower due to efficient platform).
5 CONCLUSIONS AND FUTURE
PERSPECTIVES
We have presented and analyzed the effectiveness of
a DPS based AsDPM power strategy on different
applications (including video encoding) for different
ARM based platforms. We have also validated the
execution of the real ARM1176JZF-S platform with
our virtual QEMU_ARM1176 platform. The results
show the same behavior on both platforms having a
negligible deviation of 0.03% of time and 0.31%
(few milli-joules) for energy consumption. We have
also shown that our strategy is compatible with
different configuration of multi-core platforms (i.e.
QEMU_ARM1176 and QEMU_CortexA9) and
provided significant energy gains ranging between
minimum gains of 12.58% to a maximum gain of
60% under different operating conditions. Using the
virtual platform, we have thus explored the
efficiency of the DPS strategy for different
applications implemented under several platform
configurations (2, 3 and 4 processors). The power
strategy provides gain that ranges up to 60%
depending upon the different values of the actual
execution time as well as the number of processors.
Other perspectives of this work are to implement
and study power strategies like presented by (Khan,
2012) and (Chéour, 2011) on real hardware
platforms boards like the ARM1176JZF-S and the
ARM11 CortexA9 in order to explore their
effectiveness in the real development world.
REFERENCES
M. K. Bhatti, M. Farooq, C. Belleudy, M. Auguin,
O.Mbarek, 2009, "AsDPM strategy for globally
scheduled RT multiprocessor systems", In proceedings
of 19th international conference of ICSD,PATMOS'09.
R. Joseph, M.Martonosi, 2001, “Runtime Power
Estimation in High Performance Microprocessors”,
Symposium on Low Power Electronics and Design.
L. Benini, A. Bogliolo, and G. De Micheli, 1998,
“Monitoring system activity of OS-directed dynamic
power management”, International Symposium on
Low Power Electronics and Design.
V. Tiwari, S. Malik, and A. Wolfe, 1994, “Power analysis
of embedded software: a first step towards software
power minimization”, IEEE Transactions on Very
Large Scale Integration (VLSI) systems.
L. Benini, G. De Michelli, 2000, “A survey of Design
Techniques for System-Level DPM”, IEEE
Transactions on VLSI systems, Vol.8, No.3.
C. Y. Yang, J. J. Chen, T. W. Kuo, L. Thiele, 2009, “An
Approximation Scheme for Energy-Efficient
Scheduling of Real-Time Tasks in Heterogeneous
Multiprocessor Systems”, DATE '09.
L. Benini and G. De Micheli, 1997, “Dynamic Power
Management: Design Techniques and CAD Tools”,
Springer; 1st edition.
S. Irani, S. K. Shukla, and R. K. Gupta, 2003, “Online
strategies for DPM in systems with multiple power-
saving states”. ACM Trans. Embed. Syst.
C. H. Hwang, A.C-H.Wu, 2001, “A predictive system
shutdown method for energy saving of event driven
Computation”, In proceedings of TODAES’01.
ARM, 2006, “Intelligent Energy Manager (IEM) in the
ARM1176JZF-S Development Chip. Application Note
172. http://infocenter.arm.com.
INTEL, 2004, Enhanced Intel Speed Step (EIST) for multi-
core processors with unified Level 2 cache.
http://www.intel.com/support/processors.
H. Cheng and S. Goddard, 2006, “Online energy-aware i/o
device scheduling for hard real-time systems”, In
proceedings of DATE ’06, Belgium.
M. Gligor, N. Fournel, F. Pétrot, F. Colas-bigey, A.M.
Fouilliart, P.Teninge, M.Copolla, 2010, “Practical
Design space exploration of Handheld devices using
Virtual Platform”, Lecture notes in CS; Vol
5953/2010.
ST-Erricson, 2011, “Hardware Reference Manual SKY-
S9500-ULP-CXX” (aka Snowball PDK-SDK),
Revision 1.0.
J. Khan, S.Bilavarn, C. Belleudy, 2012, “Impact of
Operating Points on DVFS Power Managemeng”, in
7
th
International conference DTIS’12), Tunisia.
J. Khan, S. Bilavarn, C.Belleudy, 2012, "Energy analysis
of a DVFS based power strategy on ARM platforms"
in 11th IEEE conference FTFC, Paris France.
R. Chéour, S. Bilavarn, M. Abid, 2011, “Exploitation of
the EDF scheduling in the wireless sensors networks”,
Measurement Science Technology Journal (IOP),
Special Issue: Devices, Signals and Materials.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
130
