
Distributed Forwarder Selection on Beaconless Routing for Real-time
Services in Wireless Sensor Networks
Yongbin Yim, Hosung Park, Jeongcheol Lee, Seungmin Oh and Sang-Ha Kim
Department of Computer Engineering, Chungnam National University,
220 Gung-dong, Yuseong-gu, Daejeon, Republic of Korea
Keywords:
Beaconless, Real-time, Geographic Routing, Routing Protocol, Wireless Sensor Networks.
Abstract:
In wireless sensor networks (WSNs), real-time service is one of the important issues. Typically, existing
studies for the service are relied on beacons. Recently, beaconless routing has been proposed to overcome
control overhead for resource constrained environment of WSNs. Thus, real-time communication based on
the beaconless scheme could give great advantages with less energy consumption. To do that, however, it
brings new challenges. For the real-time communication, each node needs to be aware of single hop delay for
data forwarding within desired time. In conventional approaches, it is based on delay in neighbor information
through beacons. An appropriate next forwarder is selected by a sender. However, in the beaconless scheme,
a sender could not select a next forwarder since that is determined by a receiver. Also, contention delay is
included in single hop delay for beaconless routing. Thus, the delay estimation principle should be renovated.
In this paper, we present a receiver-based real-time routing protocol, called RBRR. We design a novel delay
estimation strategy. The single hop delay from a sender to a receiver could be calculated by a receiver but
not a sender. Therefore, the receiver itself makes a decision whether desired time requirement is satisfied.
Simulation experiments show that the strategy achieves higher performance in terms of energy consumption.
1 INTRODUCTION
Wireless sensor networks (WSNs) are composed of a
large number of sensor nodes with low power battery.
Besides, most of power resources are dissipated in
transmission. Therefore, design of energy conserving
routing protocol is one of the important issues in these
WSNs. Though earlier position-aware routing proto-
cols are considered as energy efficient, they still suffer
periodic beacons to maintain knowledge of presence
of neighboring nodes. Nodes even not taking part in
any routing process should emit beacons. Also, it is
may not be appropriate for WSNs in highly dynamic
scenarios where network topology changes frequently
due to nodes availability.
Recently, beaconless routing protocols have been
proposed in an effort to overcome such drawbacks
(H. Fuessler and Hartenstein, 2003; B. Blum and
Stankovic, 2003). When data packets are needed to
transmit, next forwarder is selected by contention.
Contention is completed through waiting function,
which is uniquely assigned to each candidate for a
next forwarder selection. The winner for the con-
tention has permission to deliver data. Typically, a
node with the largest progress to a destination has the
shortest waiting time. This obtains an outcome of en-
ergy saving effect. Also, since actual existent neigh-
bors participate in the contention, it could avoid selec-
tion of non-valid next forwarder caused by outdated
neighbor information.
One of essential application categories that are in-
dispensable in WSNs is real-time service. Existing
real-time communication protocols are mostly gov-
erned by the conventionalgeographic routing scheme,
which each node has to periodically broadcast bea-
cons. Therefore, real-time communications based on
the beaconless scheme could give great advantages
with less energy consumption.
To do that, however, it brings new challenges. In
conventional real-time communication, a sender se-
lects an appropriate node which satisfied real-time
constraints and forwards data to the node by main-
taining information of neighboring nodes. For decid-
ing whether a neighbor node satisfies real-time con-
straints, a sender calculates delay between entering
time to output queue and sending time of the last
bit for a packet. Namely, delay information main-
tained by each node is duration while data is for-
202
Yim Y., Park H., Lee J., Oh S. and Kim S..
Distributed Forwarder Selection on Beaconless Routing for Real-time Services in Wireless Sensor Networks.
DOI: 10.5220/0004315902020207
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2013), pages 202-207
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
S
n
1
n
2
n
3
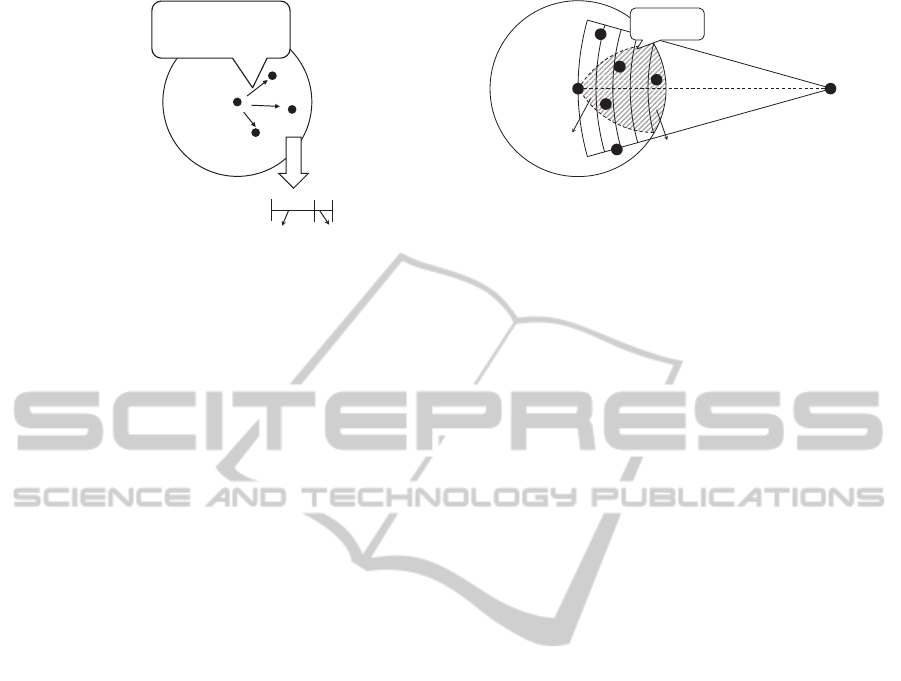
Broadcasts data
with sender’s average
processing delay
Sender’s
processing delay
Waiting
delay
single hop delay (S ĺn
2
)
Figure 1: Delay estimation in RBRR.
warded from the node itself to a neighbor node. How-
ever, in receiver-based beaconless schemes, a receiver
itself should decide to become a next forwarder. The
receiver requires delay of duration from a sender to
the receiver itself in such routing schemes. Thus,
existing schemes could not support this delay infor-
mation. Also, the receiver-based beaconless schemes
have contention delay to select a next forwarder with-
out neighbor information. Each candidate has unique
waiting time to avoid transmission collision. The
node having the shortest waiting time wakes up firstly
and wins permission to forward data. Therefore, this
contention delay should be included to the single hop
delay but existing schemes could not support this de-
lay estimation principle.
In this paper, we present a receiver-based beacon-
less real-time routing protocol, called RBRR. The sin-
gle hop delay is calculated at a receiver. When a
sender broadcasts data, the data includes average sin-
gle hop delay. After a neighbor wakes up, the node
decides to become a next forwarder by the average
single hop delay information and waiting time con-
sumed for contention. Simulation results show that
our protocol has less energy consumption and high
performance for real-time service.
The remainder of this paper is organized as fol-
lows. In section II, we review related work. The pro-
posed protocol is presented in Section III and the ex-
periment result of the proposed protocol is Section IV.
Finally, the paper is concluded in Section V.
2 RELATED WORK
Beaconless routing reduces energy consumption by
eliminating beacon message exchange. Beaconless
routing protocols are categorized into two types ac-
cording to selection scheme of relay node: sender-
based and receiver-based.
There are IGF (B. Blum and Stankovic, 2003),
S
D
Forwarding
Area
Sub-time zone 0
N
tz
- 1
Figure 2: Waiting delay assignment by sub-time zone for
contention.
CBF (H. Fuessler and Hartenstein, 2003) in sender-
based scheme. These studies exploit RTS/CTS hand-
shaking. A sender broadcasts RTS and then neighbors
receiving this message have unique waiting time re-
spectively. A node waking up first sends CTS to the
sender. The sender selects the node as a relay node
and delivers data to the node.
BLR (M. Heissenbuttel and Wachli, 2004), BGR
(Turau, 2005) could be defined as receiver-based
scheme. In these studies, a sender deliver data first
rather than RTS/CTS messages. Neighbors receiving
data also wait for contention. A node waking up first
resends data for next forwarding. In other words, re-
ceivers themselves whether to decide deliver data or
not.
SPEED (T. He and Abdelzaher, 2005) exploits
feedback control technique to maintain delay of
neighbors. The study selects relay nodes by non-
deterministic geographic forwarding scheme. Each
sensor node sends 1-hop delivery speed information
to neighbors which want the information. It maintains
nodes which meet desired speed among its neigh-
bors into routing list. Then a sender transmits pack-
ets to one of the nodes in the list. At this time, se-
lected node as a relay node reports its own delivery
speed to surroundingnodes after transmitting a packet
by the feedback control technique. SPEED of this
kind method is the first spatiotemporal communica-
tion scheme.
CBRR (Huang and Wang, 2010) is recent one of
studies for providing real-time service based on bea-
conless routing. CBRR exploits sender-based relay
node selection scheme. Since sender-based schemes
need additional control process such as RTS/CTS
message exchanging, sender-based schemes have
longer delay than receiver-based schemes have. Thus,
deliverysuccess ratio within desired time could be de-
crease.
DistributedForwarderSelectiononBeaconlessRoutingforReal-timeServicesinWirelessSensorNetworks
203

3 RECEIVER-BASED
BEACONLESS REAL-TIME
ROUTING
Unlike convention real-time routing protocols which
maintain neighbor list and select a next relay node
utilizing the list, in RBRR, a receiver itself deter-
mines whether to be a relay node. Also, because there
is no exchanging beacon messages, sensors are not
aware of existence of each other. Therefore, a sender
broadcasts data and a next forwarder acquires trans-
mission permission through contention process in the
receiver-based schemes. Waiting time is consumed
for the contention so it should be considered that this
time is included. Thus, we need to redesign delay
estimation principle to adapt beaconless-routing. In
this section, we describe delay estimation method on
receiver-based scheme and explain how data is deliv-
ered by utilizing this method.
3.1 Spatiotemporal Approach for
Real-time Services
The conventional schemes (T. He and Abdelzaher,
2005) for real-time data dissemination mainly ex-
ploit the spatiotemporal approach in order to deliver
data from a source to a static sink within a desired
time deadline T
setdeadline
. While in multi-hop wireless
sensor network, since communication is physically
bounded, the end-to-end delay depends not only on
single hop delay (temporal), but also on the distance a
packet travels (spatial). To achieve this, source nodes
initially calculate a desired delivery speed S
setspeed
with the time deadline and the end-to-end distance
d(source, sink) from the source to the sink as follows:
S
setspeed
=
D(source, sink)
T
setdeadline
(1)
In the protocols, each node on the dissemination
route selects a node as its next-hop node which is
nearer to the sink and provides a better relay speed
than the desired delivery speed S
setspeed
. The relay
speed means the advance in distance to each next node
dividing by the delay to forward a packet to the each
next node. The end-to-end real-time data dissemina-
tion is achieved by maintaining the desired delivery
speed from sources to the sink.
3.2 Delay Estimation
In order to calculate relay speed discussed above at
each hop, we need to be aware of the single hop delay
r
r
D
S
n
1
n
2
n
3
(radio range)
Figure 3: Basic principle of data forwarding in RBRR.
between a sender and a receiver, and the distance be-
tween them. Single hop delay means hold-up time in a
hop. In RBRR, we define single hop delay as the time
for that data from a current forwarder is broadcasted
and a next forwarder is determined among neighbors
receiving the data. Therefore, single hop delay in-
cludes processing delay due to buffering, MAC pro-
tocols and so on such backoff, and waiting delay for
contention.
Existing single hop delay estimation is computed
by a sender because next forwarder selection is per-
formed on sender side. However, since a next for-
warder is determined by neighbors after receiving
data in RBRR, it should provide single hop delay in-
formation for receivers. Conventional single hop de-
lay estimation principle could not be directly adapted.
When a sender broadcasts data, it includes aver-
age processing delay of the sender into the data packet
header. Calculation of the processing delay is ob-
tained by difference between the entering time into
output queue of a data packet (T
arr
) and the actual
sending time of last bit of the data (T
dprt
) as well as
the conventional real-time schemes. This time is ac-
cumulated to previous average processing delay and
then the average processing delay is updated as fol-
lows.
Delay
new
= ε·(T
dprt
− T
arr
)+ (1− ε) · Delay
prev
(2)
As shown in Fig. 1, when a candidate node wakes
up after certain waiting time, this node adds average
processing delay of the sender to consumed time for
waiting (waiting delay) and decides to satisfy desired
speed.
3.3 Forwarding in RBRR
Since communication is physically bounded in wire-
less networks, minimizing the number of hops brings
better performance in terms of delivery deadline suc-
cess ratio. Therefore, the closer node is to a destina-
tion, the shorter waiting time becomes in contention
process for beaconless routing. Waiting time is as-
signed according to distance to a destination between
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
204

Overhear data
transmission of
another candidate?
Timer is
expired?
Receiving
data
Discard the data
Waiting for contention
Satisfy
desired speed?
Broadcast the data
yes
yes
yes
no
no
no
Figure 4: Decision flow of becoming a next forwarder.
0 and D
MAX
. D
MAX
represents maximum time given
by an application to wait for contention.
For contention process, each candidate must have
unique waiting time to avoid collision with the oth-
ers. It can be assigned according to progress toward
a destination. However, some nodes might have same
progress. Also, adding simply random values incurs
duplicate wait time as well in case of some nodes hav-
ing distance differences as much as a random value.
To deal with this, we divide forwarding area into sub-
time zones (J. A. Sanchez and Ruiz, 2007). Each sub-
time zone has mutually different waiting time. In a
same sub-time zone, each candidate has random time
respectively. Therefore, all candidates could avoid
transmission collision. To construct sub-time zones,
a forwarding area is divided into the number of sub-
time zones (N
tz
) given according to applications. A
zone index affiliated candidate neighbor n is obtained
as follows:
Z
n
=
N
tz
×
1−
d(s, d) − d(s, n)
r
(3)
where s and d are the current forwarding node and
the destination. The function d(c, d) represents the
Euclidean distance between the positions of the nodes
c and d. In order to give shortest waiting time to the
closest node toward the destination, it reversely assign
the time in proportion to radio range r.
Each sub-time zone could wait until for time
(D
MAX
/ N
tz
). Thus, we could compute delay of each
candidate neighbor as follows:
T
wait
=
Z
n
×
D
MAX
N
tz
+ rand
D
MAX
N
tz
(4)
here, the function rand(x) returns a random value be-
tween 0 and x. Therefore, a node in the farthest group
from a sender node starts wake up in order. If there is
no qualified node, chance passes to the next group by
equation (4). Fig. 2 shows an example of the sub-time
zone.
Movement speed could be calculated by single
hop delay and progressed distance. Satisfying this
speed represents that real-time data is successfully
delivered within desired time. Thus, data is re-
broadcasted by the receiver and this means namely
relaying data is successfully fulfilled. This procedure
is continuously repeated until data reach to a destina-
tion. Fig. 3 shows data delivery process described
above. Sender S broadcasts data. Then candidate
neighbor n
1
, n
2
and n
3
receive data and wait for as-
signed time respectively. Since n
2
is the closest to
destination D, n
2
wakes up first and decides whether
to be able to satisfy desired speed. If n
2
satisfies the
desired speed, n
2
broadcasts data as the next relay
node. Other candidates overhear the broadcasting of
n
2
and cancel its own waiting timer.
When the first node finished waiting time trans-
mits data as a relay node, other candidates give up
the contention by overhearing the transmission. How-
ever, some nodes might not be included within ra-
dio range of the relay node. This may cause du-
plicate transmission. To avoid the duplications, we
bring Reuleaux Triangle described in BLR. All nodes
within the area can overhear each other. Basic process
of next forwarder decision is described in Fig. 4.
4 EXPERIMENTAL RESULTS
We compare the performance of RBRR with that of
the representative real-time routing scheme in WSNs,
SPEED (T. He and Abdelzaher, 2005). We imple-
mented three protocols in Network Simulator Qual-
net 4.0 (QUALNET, 2008). Sensor nodes follow the
specification of MICA2 (Hill and Culler, 2002) and
their transmission range is about 50m. IEEE 802.11b
was used as the MAC layer protocol. The size of
the sensor network is set to 250m 250m where 2500
nodes are randomly distributed. For all simulations,
we use one source-sink pair for performance evalua-
tion. We use the following metrics for performance
analysis and evaluations: the success delivery ratio is
defined as the ratio of the number of data packet suc-
cessfully received within desired time by the sink to
the number of data packets generated by the source.
The control overhead is defined as the total number
of control packets. The average energy consumption
is defined as average consumption of twenty times of
transmission. Transmitting and receiving power con-
sumption rates of the sensors are 21mW and 15mW,
respectively. The beacon interval is set to 1.5s and ac-
DistributedForwarderSelectiononBeaconlessRoutingforReal-timeServicesinWirelessSensorNetworks
205
300 400 500 600 700 800 900
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Delivery deadline success ratio
Desired delivery speed (m/s)
SPEED
RBRR
60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 380 400
1500
2000
2500
3000
3500
4000
4500
5000
5500
Average Energy Consumption (mW)
Simulation Time (ms)
SPEED
RBRR
8 10 12 14 16
20000
25000
30000
35000
40000
The number of packets
Node density (node numbers / radio range)
SPEED
RBRR
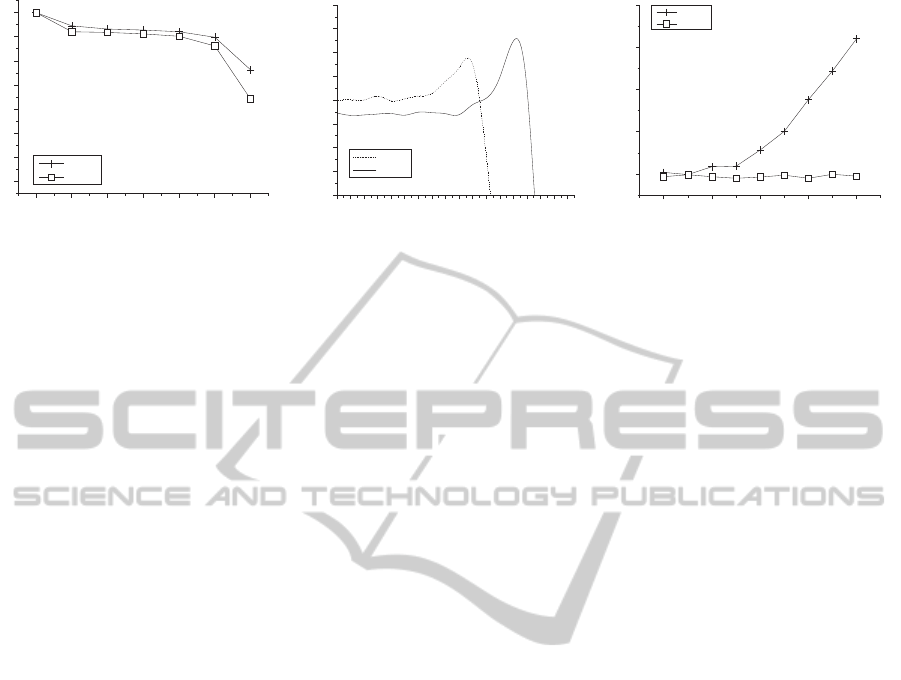
Figure 5: Success delivery ratio im-
pacted by sink speed.
Figure 6: Average energy consumption
according to elapsed simulation time.
Figure 7: The number of total packets
impacted by node density.
cordingly the time-out interval to 4.5 1.5s = 6.75s af-
ter which a node is deleted from the neighbor table if
no beacon is received. We use constant bit rate (CBR)
traffic. To test performance at one time, a node is ran-
domly chosen from left side of the terrain and sends
periodic data to the right side of the terrain. The node
generates 1 CBR flow with a rate of 1 packet/second.
The results in Fig. 5 show network lifetime ac-
cording to elapsed simulation time. For comparing
network lifetime, we estimate the energy consump-
tion of the whole sensor nodes based on MICA2 mote
energy model. We set battery capacity of a sensor
node to 3000mW. In SPEED, since each sensor node
periodically exchanges beacon messages, depletion
time of a node is shorter than one of RBRR.
In Fig. 6, deadline delivery success ratio due to
desired delivery speed is depicted. We vary a de-
sired delivery speeds between 400m/s and 1000m/s
to compare an effect on the deadline delivery success
ratio against different speeds. In this simulation, we
set that SPEED is so operated that the fastest path is
selected for transmission. Also, we do not consider
traffic distribution. SPEED has no delay for selec-
tion relay nodes so delivery deadline success ratio is
relatively higher than one of RBRR. However, since
success ratio keeps over 0.9 to desired speed 700m/s,
it could say that RBRR is effective.
Fig. 7 shows communication overhead accord-
ing to density. Packet overhead means total number
of packets sent at the radio layer. In SPEED, packet
overhead rapidly increases due to congestion caused
by beacons to update neighbor table. Therefore, re-
transmission or additional control is more required ac-
cording to be dense. However, in RBRR, the density
does not affect the communication overhead. Since
RBRR does not require beaconing, congestion proba-
bility is almost constant. So, RBRR has advantage in
terms of scalability.
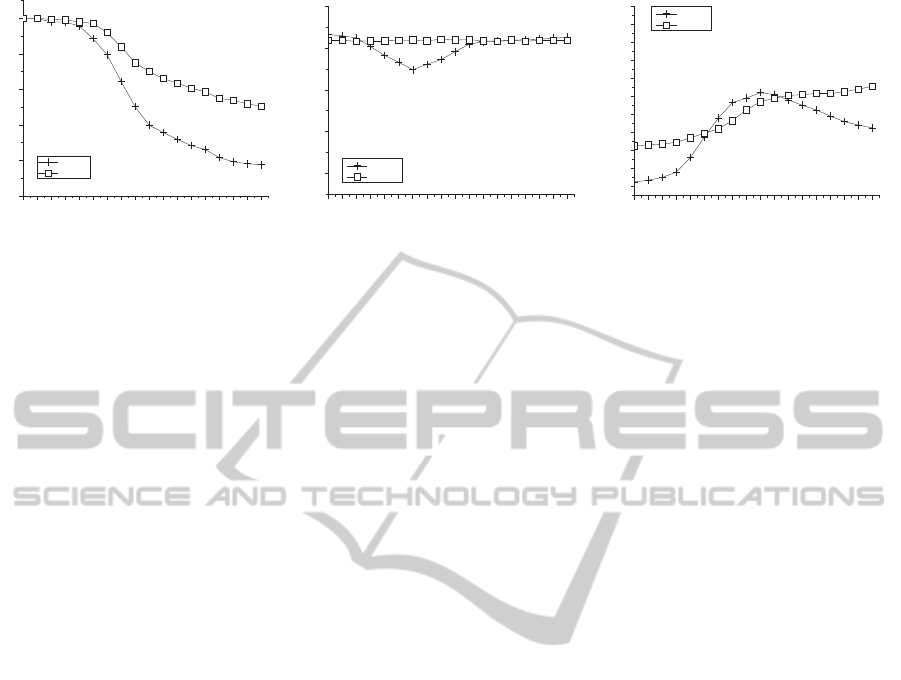
Fig. 8 shows the number of node alive accord-
ing to elapsed simulation time. Periodic beacon mes-
sages in SPEED quicken dissipation of node. There-
fore, the number of node alive dramatically decreases
in the middle of simulation time. At the end of the
simulation time, since many nodes are dissipated, the
number of beacons decreases and then nodes dissipa-
tion speed shows a decreasing trend. On the other
hand, since RBRR extremely reduces control mes-
sages, nodes endure long time in comparison with
SPEED.
Fig. 9 plots delivery deadline success ratio in
network dynamics. In this experiment, we set de-
sired delivery speed to 500m/s. As simulation time
passes, network topology frequently changes due to
dissipated sensor nodes. In the middle of the simu-
lation time between 140s and 240s, sensor nodes are
rapidly dissipated and then topology of the network
variesfast. In SPEED, since forwarder selection relies
on the neighbor table, information about some nodes
might not valid anymore on the situation. Thus, trans-
mission failure might occur frequently until the tables
are updated by beacons. However, RBRR needs not
to maintain neighbor tables. It always operates among
actually existent nodes. RBRR is tolerant of network
dynamics in comparison with conventional real-time
scheme based on beacon messages.
Fig. 10 shows end-to-end delay according to net-
work dynamics. As we discussed above experiment,
frequent topology changes might cause retransmis-
sion or additional control. It affects to end-to-end
packet delivery delay. In SPEED, delay rapidly in-
creases due to the reason. As simulation time passes,
many nodes are dissipated. Therefore, end-to-end
path is longer so that the delay proportionally in-
creases. Although RBRR has typically larger delay
than that of SPEED, it shows stable delay in high dy-
namics of networks.
5 CONCLUSIONS
In this paper, we propose a receiver-based beaconless
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
206
60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 380 400
0
500
1000
1500
2000
2500
The number of nodes alive
Simulation time (s)
SPEED
RBRR
60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 380 400
0.6
0.7
0.8
0.9
1.0
Delivery Deadline Success Ratio
Simulation time (s)
SPEED
RBRR
60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 380 400
40
60
80
100
120
140
160
180
200
220
240
End-to-end Delay (ms)
Simulation time (s)
SPEED
RBRR
Figure 8: The number of nodes alive ac-
cording to elapsed simulation time.
Figure 9: Delivery deadline success
ratio according to elapsed simulation
time.
Figure 10: End-to-end delay according
to elapsed simulation time.
real-time routing scheme. Beaconless routing with-
out periodic exchanging beacon messages is attrac-
tive approach. For providing real-time services with
receiver-based beaconless, delay estimation principle
should be renovated focusing on receivers. To do that,
we propose new delay estimation principle, called
RBRR. A sender includes its own single hop delay
into data for receiver to receive. Also, it adds waiting
time for contention to single hop delay. Experimental
results for performance evaluation show that RBRR
well provides real-time services while achieves high
energy efficiency.
REFERENCES
B. Blum, T. He, S. S. and Stankovic, J. (2003). Igf: A
statefree robust communication protocol for wireless
sensor networks. Technical report.
H. Fuessler, J. Widmer, M. K. M. M. and Hartenstein, H.
(2003). Contention-based forwarding for mobile ad
hoc networks. AdHoc Networks, 1(4):351–369.
Hill, J. and Culler, D. (2002). Mica: a wireless platform for
deeply embedded networks. IEEE Micro, 22(6):12–
24.
Huang, C. and Wang, G. (2010). Contention-based bea-
conless real-time routing protocol for wireless sensor
networks. Wireless Sensor Network, 2(7):528–537.
J. A. Sanchez, R. M.-P. and Ruiz, P. M. (2007). Boss:
beacon-less on demand strategy for geographic rout-
ing in wireless sensor networks. In MASS’07, 4th
IEEE Int. Conf. on Mobile Ad-hoc and Sensor Sys-
tems, pages 1–10. IEEE.
M. Heissenbuttel, T. Braun, T. B. and Wachli, M. (2004).
Blr: Beacon-less routing algorithm for mobile ad-
hoc networks. Elsevier’s Computer Communications
Journal (ECC), 27(1):1076–1086.
QUALNET (2008). Scalable network technologies. http://
www.scalable-networks.com.
T. He, J. Stankovic, C. L. and Abdelzaher, T. (2005). A
spatiotemporal communication protocol for wireless
sensor networks. IEEE Trans. Parallel and Distrib.
Syst.
Turau, M. W. V. (2005). Bgr: Blind geographic routing for
sensor networks. In WISES’05, the Third Workshop
on Intelligent Solutions in Embedded Systems. IEEE.
DistributedForwarderSelectiononBeaconlessRoutingforReal-timeServicesinWirelessSensorNetworks
207
