
Peer-to-Peer MapReduce Platform
Darhan Akhmed-Zaki
1
, Grzegorz Dobrowolski
2
and Bolatzhan Kumalakov
1
1
Mechanics-Mathematics Faculty, al-Farabi Kazakh National University, Al-Farabi ave. 71, Almaty, Kazakhstan
2
Department of Computer Science, AGH University of Science and Technology, Cracow, Poland
Keywords:
Peer-to-Peer Computing, MapReduce Framework, Multi-agent Systems.
Abstract:
Publicly available Peer-to-Peer MapReduce (P2P-MapReduce) frameworks suffer lack of practical implemen-
tation, which significantly reduces their role in system engineering. Presented research supplies valuable data
on working implementation of P2P-MapReduce platform. Resulting novelties include advanced workload dis-
tribution function, which integrates mobile devices as execution nodes; novel computing node and multi-agent
system architectures.
1 INTRODUCTION
Current research is motivated by a chapter on
Peer-to-Peer MapReduce framework presented in
(Antonopoulos and Gillam, 2010), where authors use
simulation to justify its benefits.
We conduct practical experiment and pursuits two
objectives. First of all, theoretical studies presented
in (Marozzo et al., 2011) and (Antonopoulos and
Gillam, 2010) emphasize that volunteer computing
promises considerable increase in system dependabil-
ity due to self-organization phenomena. That is P2P-
MapReduce platform is more likely to finish execu-
tion when unexpected node failure accrues or nodes
leave infrastructure unpredictably at a run time. We
support this argument by conducting computational
experiment and presenting derived practical data.
Second, we analyse workload distribution within
complex computing infrastructure. System complex-
ity in this case comes from viewing computing ar-
chitecture as a collection of autonomous devices,
which encapsulate control and goal achieving func-
tions (Zambonelli et al., 2003). As a result, devices
are not viewed as means of achieving targets, but as
active components that solve user defined problems
by self-organizing and cooperating.
We bring additional complexity by integrating
mobile devices as processing units into the comput-
ing infrastructure. As a result, agent accepts mapper
and reducer roles with respect to its subjective self-
evaluation. Thus, device capabilities are analyzed and
decisions are made dynamically at a run time in a de-
centralized fashion.
The reminder of the article is organized as fol-
lows. Section 2 describes P2P-MapReduce architec-
ture and implementation, while Section 3 defines the
workload distribution function that servesas agent de-
cision making tool. Finally, Sections 4 and 5 present
computational experiment results and conclusions.
2 MapReduce PLATFORM
In order to implement and test P2P-MapReduce plat-
form we propose architecture, described in Subsec-
tion 2.1.
Core of our framework is the high degree of ma-
chine autonomy, which is not limited to freedom of
accepting or rejecting tasks, but also includes the right
to independently change roles from execution to exe-
cution; or take numerous roles (reducer and supervi-
sor) at the same time. Agents in this case carry orga-
nizational and managerial responsibilities. Comput-
ing node intercommunications are governed by agents
social interactions, thus, general system architecture
fully relies on P2P principles. There are several dis-
tinctions from existing architectures.
Unlike in (Gangeshwari et al., 2012), where au-
thors organize multiple data centers (agent super-
vised) into a hyper cubic structure, we view every
machine as an autonomous entity. Hyper cube agents
carry supervisory functions for data center infrastruc-
tures with pre-installed MapReduce software. Deci-
sion making is made on the level of organization; that
is accepting or rejecting jobs and optimizing commu-
nications. In our approach machines self-organize to
565
Ahmed-Zaki D., Dobrowolski G. and Kumalakov B..
Peer-to-Peer MapReduce Platform.
DOI: 10.5220/0004330405650570
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 565-570
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

actually perform MapReduce jobs without being pre-
organized into any structures. Moreover, they do not
require installing additional MapReduce software.
In (Marozzo et al., 2011) computing devices (run
by agents) are assigned master or slave roles and then
master nodes cooperate to organizeand manage effec-
tive job execution. One master node communicates
with the user and organizes task execution, whilst
other master nodes monitor it and voluntarily take on
control if it fails. Slaves are assigned map and reduce
operations by an active master node, execute code and
return the result to the master.
P2P principles, in this case, are implemented to
manage master node failure, whilst slave nodes are
being controlled. In our approach there is no di-
rect control mechanism, but localized supervision in
a form of reducer-mapper and supervisor-reducer re-
lationships. This means that no node has direct con-
trol over others, but may indirectly influence execu-
tion flow. In such a way we apply the complexity
prism and design a system that makes use of agent
autonomy in a broader way.
We are also aware of other volunteer MapReduce
architectures (Costa et al., 2011) and (Dang et al.,
2012), which, however, do not make use of agent-
oriented approach.
Reminder of the section describes system archi-
tecture and its current implementation in more details.
2.1 Architecture
Our system consists of multiple nodes that interact in
order to perform MapReduce jobs. Every node may
initiate user task, or perform any task offered to it.
Process is visualized in Figure 1.
Broker node receives job specification from the
user, brakes it into reduce and map tasks and broad-
casts information messages to potential performers
(Figure 1). Having received a broadcast message,
other nodes evaluate it and issue an offer or do not re-
spond to information message at all. Broker chooses
between potential performers on the basis of offer
price and readiness to become reducer node, where
the lowest offer (or the first lowest offer received, if
there is a number of them) wins.
Chosen performer gets confirmation message and
looks for supervisors to serve as active backup entities
for the execution time. Their primary role is to moni-
tor reducer actions, save peer state and, if unexpected
failure accrues, to restart it in the last available state.
When supervision is set, performer requests the
job, gets reducer status and searches for mappers and
leaf reducer nodes by following the same protocol. In
such a way nodes self-organize in a tree structure until
Figure 1: UML Sequence Diagram describes agent interac-
tions when performing a job.
Figure 2: Diagram describes MapReduce tree structure that
is formed by peer nodes before reduce operation begins.
the last required node is added to the tree structure
(Figure 2).
Reducer nodes serve as a core of the tree struc-
ture, whilst mapper nodes do not have leaf nodes at
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
566
all. This means that every reducer node tries to find
leaf reducer and if none is fount, tree development
terminates. Number of mapper nodes per reducer is
set by system developer, as well as number of su-
pervisors required per reducer. One supervisor may
supervise numerous reducers and take on mapper or
reducer roles at the same time depending on self eval-
uation results.
Job execution terminates when all mapper nodes
pass their results to corresponding reducers and all re-
ducers in a hierarchy pass processed results up to the
level of the broker node.
It is also remarkable that the broker agent does not
have any mapper nodes, but every reducer node does.
Supervisors monitor reducer nodes and reducers carry
out supervision role for their mapper nodes.
On the node level there are three main com-
ponents: broker agent, performer agent and com-
piler/interpreter.
When node receives a broadcast message, it is
handled by the performer agent. Performer agent
evaluates nodes current state and makes a decision
whether to form an offer message or to do nothing. If
an offer is issued to the requesting node, performer is
responsible for handling upcoming operations. That
is finding supervisors, passing executable code to the
interpreter/compiler, retrieving execution results and
sending them to the destination.
Broker agent is created by interpreter/compiler
when user wants to launch a computing task. It
is responsible for broadcasting information mes-
sages, finding itself supervisor and reducer nodes and
handling organizational communication at execution
time.
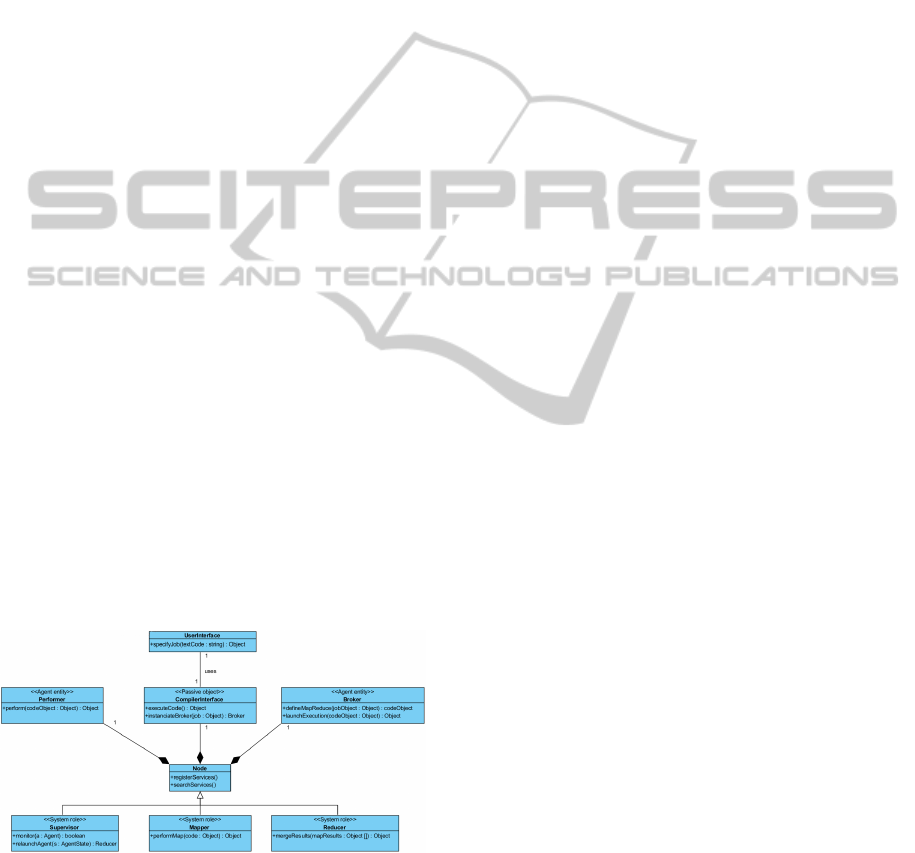
Figure 3 presents class diagram, which visualizes
nodes structure, system roles and their relationship to
the user interface.
Figure 3: UML Class Diagram describing nodes composite
structure, their roles and relationship with user interface.
More details on agent decision making are ex-
plained in Section 3.
2.2 Implementation
We implemented system prototype using JADE (Bel-
lifemine et al., 2007) due to cross platform prop-
erties and well established development tools of
Java. Moreover, availability of standard Jade behav-
iors allowed convenient grouping of individual op-
erations using ParallelBehaviour and SequentialBe-
haviour classes, supplied in JADE-4.2.0 distribution.
Executable code (written in Lisp) is encapsulated
into ACLMessage object and passed between agents.
Code is executed on Java Virtual Machine using
Clojure-1.4 (PC and server machines) and JSceme-
7.2 (mobile devices). It is important that standard
JSceme libraries had to be modified in order to work
with floating point numbers and files on mobile de-
vices. Apart from that software was used as supplied
in standard distribution.
Agent initialization includes publishing two ad-
vertisements: first, supervision services, second,
MapReduce services. As noted before there is no pre-
defined mapper or reducer role, because it depends on
self-evaluation at execution time.
Supervisor does not copy reducer state directly,
but knows about changes by listening to duplicated
messages, sent to the reducer. In other words it up-
dates state record when receives mapper and leaf re-
ducer message duplicates.
In order to describe job submission and failure
recovery mechanisms we take example scenario that
corresponds to the algorithm described in Figure 1:
1. All agents register their supervision and execution
services using DFAgentDescription class;
2. When job arrives broker agent breaks it down into
map and reduce operations and launches initiate-
Execution behavior, which is an extention of the
Jade Behaviour;
3. When perspective performer receives offer it de-
cides to execute the reduce task or not. If deci-
sion is positive, agent instantiates SequentialBe-
haviour object with unique CoversationId;
4. Broker tracks best offer among received within
specified timeout and sends confirmation;
5. Perspective performer becomes reducer node
and searches for supervisors by broadcasting
ACLMessage.INFORM. When answers are re-
ceived first three answer owners become super-
visors and their addresses are put into offerMes-
sage. Then offerMessage is broadcasted to new
potential performers;
6. Supervisors monitor their reduce node. If a call
timeout is reached, supervisor tries to re-launch
Peer-to-PeerMapReducePlatform
567

the agent. If host is unreachable, supervisor tries
to assign the task to other host at last reducer state;
7. When reducer receives mapper and leaf reducer
results it uses provided reduce code and data by
passing it to the Clojure compiler or scheme in-
terpreter for execution. Result is encapsulated and
returned to the specified destination;
8. When reducer part is done it notifies supervisors
and all of them delete their job SequentialBe-
haviour object.
3 WORKLOAD DISTRIBUTION
FUNCTION
Task of the distribution function is to distribute work-
load between computing nodes as even as possible.
Formally it may be specified as follows.
Let us denote executable task by J and its step
by k, such as J = {k
1
, k
2
, . . . , k
n
}, where all steps
are performed by a set of computing nodes A =
{a
1
, a
2
, . . . , a
m
}. k in this case is an uninterrupted pro-
cess which is performed according to its specification.
If step k
n
may be performed by node a
m
, we denote it
as a mapping function k
n
→ a
m
.
Workload distribution means that mappings be-
tween different nodes in A should be distributed as
even, as possible. Let us use price as a derivative
of available resources, workload and other parame-
ters, which reflects comparative workload of individ-
ual device. As a result, every successful mapping
k
i
→ a
j
(1 ≤ i ≤ n, 1 ≤ j ≤ m) gets computing price
p
ijk
assigned by an accepting computing node. Fol-
lowing is the price function:
p
ijk
= f(ω
k
, p
b
, b
l
) (1)
Here, p
b
denotes basic resource price, which is
set by device owner; b
l
denotes battery load; and ω
k
denotes resources availability at the time, when step k
arrives.ω
k
has following descrete values:
ω
k
=
1 device free, can map and reduce
0.6 device buisy, can map and reduce
0.3 device can map only
0 otherwise
Computed price for different mappings may not
be the same p
ijk
6= p
l jk
, where i 6= l and 1 ≤ i, l ≤ m.
If they are equal, the conflict is resolved on the first
come first served basis.
After price is computed tuple ((ρ(ω
ijk
), p
ijk
) is re-
turned to initiator node, where p
ijk
is computer price
and ρ(ω
ijk
) is determined as follows:
ρ(ω
ijk
) =
1 ω
ijk
> 0, want to supply services
0 otherwise
Then, issuer returns result of function ϕ(p
ijk
),
which determines executor node.
ϕ(p
ijk
) =
1 ρ(ω
ijk
) = 1, p
ijk
of k → a
i
lowest
0 otherwise
We, also, include client balance cb value in order
to represent the amount of money user can spend on
services.
Using values stated above distribution function is
formulated as follows:
min
p
n
∑
i=1
ρ(ω
ijk
)ϕ(p
ijk
) (2)
Subject to:
n
∑
i=1
ρ(ω
ijk
)ϕ(p
ijk
) ≤ cb (3)
n
∑
i=1
ρ(ω
ijk
)ϕ(p
ijk
) > 0 (4)
Objective function (2) minimizes overall cost of
performing MapReduce job by choosing lowest price
at each step. Constraints ensure that overall solution
cost is always lower than client balance (3) and at
least one path of job execution exists (4).
Objective function is implemented as an aim of
every agent to choose cheapest offer available. In its
turn, offer is a derivative of unused physical resources
of the host device. In such a way it is ensured that next
step performer is the one, who has bigger proportion
of free resources.
4 EXPERIMENT
AND EVALUATION
4.1 Experiment Design
In order to test our P2P platform against master-slave
based systems we have set up an infrastructure that
consists of 23 PCs with Intel Core i3 processors and
2 Gb RAM; 2 HP servers with 4 Core Intel Xeon Pro-
cessors and 6 Gb RAM. To fully test the P2P infras-
tructure we also included 12 mobile devices run under
Windows Phone and Android operation systems into
P2P-MapReduce runs.
All nodes (except mobile devices) got master-
slave based Hadoop-1.0.4 Stable release and newly
designed multi-agent MapReduce system installed on
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
568

them. Each system was tested by performing three
rounds of 100 runs of the same MapReduce task one
after another. When Hadoop runs were performed
P2P-MapReduce system was off and visa versa.
At the first stage probability of the node (includ-
ing head node) accepting the task and crashing was
programmed to be 5%, at second stage 10% and third
20%. Crashing in this case means that every time
node receives the task it calls a method, which with
the given probability calls finalize(). Frequency of
the task being launched is controlled by randomizer
that generates pauses between launches in the range
between 0 and 2 seconds.
To keep record of finished jobs and workload
distribution performer agents sent acknowledgement
messages and CPU load data to the Logger agent.
Collected data was plotted to graphs using MS Excel
software.
4.2 Experiment Results
Figure 4 presents percentage of finished jobs given
100 runs of the MapReduce task. From the results it
is seen that developed P2P platform shows better de-
pendability at the defined probabilities of failure. This
corresponds to the theoretical result of (Antonopou-
los and Gillam, 2010). However, our implementa-
tion of P2P-MapReduce platform has shown 99% of
all jobs finished at 5% failure rate, which further de-
creased down to 82% with failure probability at 20%,
unlike predicted 100%. Preliminary analysis of fail-
ure causes indicate that it might be due to supervisors
trying to restart reducer agents at overloaded devices.
Further analysis should giveclarification on this issue.
This result satisfies the first aim of the research
and supports hypothesis on the P2PMapReduce plat-
form dependability.
Figure 4: Competitive analysis of P2P platform and Hier-
archical platform performance given different node failure
probabilities.
In terms of second aim: workload distribution,
platform shows performance presented in Figure 5.
It is seen that workload is evenly distributed be-
tween computing nodes, except the highest workload
is recorded at devices number 13, 19 and 25. This
is due to the fact that those are mobile phones and
map operation takes considerably more resources to
be computed.
Figure 5: Workload distribution in P2P computing environ-
ment (x axis - CPU load; y axis - CPU hours; z axis - agent
identifier).
In order to make deeper analysis let us consider
average workload on device types: server machines,
mobile devices and personal computers (Figure 6). It
confirms higher load on mobile devices, whilst PCs
and server machines use little amount of their re-
sources.
Figure 6: Average workload distribution over device types
in P2P computing environment.
This result confirms that developed system sus-
tains desired behavior under system complexity.
Thus, there is a perspective in applying alike sys-
tem for infrastructures where computingnodes are not
guaranteed to be available for a long time.
5 CONCLUSIONS
Presented research provides some practical insides to
the P2P-MapReduce computing concept. In particu-
lar they confirm that system maintains desired work-
load balancing behavior in a complex environment
Peer-to-PeerMapReducePlatform
569

and is able to self-organize and self-reorganize dy-
namically without being explicitly programmed to do
so.
On the other hand, system performance has not
been studied yet, whist it is one of the most im-
portant factors when choosing a computing platform.
Thus, there is a need to analyze execution efficiency
and compare it to avaliable P2P-MapReduce platform
evaluations.
Further research is going to concentrate on the ex-
ecution performance. In particular we shell design or
adopt an agent learning framework that is to manage
system efficiency by affecting agents social behavior.
Finally, it is worth pointing out considerable limi-
tations of the presented research. First, implemented
P2P platform is simple and perspective platform de-
velopment may lead to changes in dependability in
any way. Second, experiment installation of Hadoop
might not be optimal and results may be misleading
to some extent.
REFERENCES
Antonopoulos, N. and Gillam, L. (2010). Cloud comput-
ing: Principles, Systems and Applications, volume 0
of Computer Communications and Networks, chap-
ter 7, pages 113–126. Springer-Verlag London Lim-
ited, London, UK.
Bellifemine, F. L., Caire, G., and Greenwood, D. (2007).
Developing Multi-Agent Systems with JADE. John Wi-
ley & Sons, NJ.
Costa, F., Silva, L., and Dahlin, M. (2011). Volunteer cloud
computing: Mapreduce over the internet. In IEEE In-
ternational Parallel and Distributed Processing Sym-
posium, pages 1855–1862. IEEE Computer Society.
Dang, H. T., Tran, H. M., Vu, P. N., and Nguyen, A. T.
(2012). Applying mapreduce framework to peer-
to-peer computing applications. In Nguyen, N. T.,
Hoang, K., and Jedrzejowicz, P., editors, ICCCI (2),
volume 7654 of Lecture Notes in Computer Science,
pages 69–78. Springer.
Gangeshwari, R., Janani, S., Malathy, K., and Miriam, D.
D. H. (2012). Hpcloud: A novel fault tolerant archi-
tectural model for hierarchical mapreduce. In ICRTIT
2012, pages 179–184. IEEE Computer Society.
Marozzo, F., Talia, D., and Trunfio, P. (2011). A framework
for managing mapreduce applications in dynamic dis-
tributed environments. In Cotronis, Y., Danelutto, M.,
and Papadopoulos, G. A., editors, PDP, pages 149–
158. IEEE Computer Society.
Zambonelli, F., Jennings, N. R., and Wooldridge, M.
(2003). Developing multiagent systems: The gaia
methodology. ACM Trans. Softw. Eng. Methodol,
12(3):317–370.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
570
