
A Method of Conceptual Modelling for Realistic Training Scenarios
Inna Shvartsman
1
, Kuldar Taveter
1
and Merik Meriste
2
1
Tallinn University of Technology, Department of Informatics, Raja 15, 12618 Tallinn, Estonia
2
Research Lab for Proactive Technologies, Tallinn University of Technology, Raja 15, 12618 Tallinn, Estonia
Keywords: Agent-oriented Modelling, Socio-technical Systems, Simulations.
Abstract: Training is crucial for improvement of the capabilities of both military and non-military personnel. In this
paper, we argue for the need of conceptual modelling for the creation of training scenarios. This research
proposes a particular method for developing training scenarios for complex domains based on agent–
oriented modelling. The advantage of agent-oriented modelling is that it enables to describe a problem
domain from three balanced and interrelated aspects – interaction, information, and behaviour, and at three
abstraction layers: analysis, design, and simulation. Thus, we can obtain agent-directed simulations for
elaborating selected aspects of emergent behaviour to support development of practical training scenarios in
a partially known environment.
1 INTRODUCTION
Training is of critical importance in preparing both
militaryand non-military personnel for peacekeeping
missions. Composing practical scenarios for training
to cope in an environment with several potential
asymmetric threats is far from trivial. In this study
we rely on realistic case studies.
A tabletop exercise is an exercise that is designed
to test the ability of a group to respond to a situation.
In a typical tabletop exercise, a facilitator creates a
setting in which each player plays a predefined role.
The facilitator also describes the situation to be
responded to and the physical environment.Training
is often conducted as a role play in the form of a
tabletop exercise. In training exercises of this kind
predefined training scenarios are used. In the
exercise, the participants act out the scenario,
whereby the scenario changes in response to their
actions and random factors, which may be
determined by rolling dice or drawing cards. This
implies that the results of a tabletop exercise cannot
be predicted as they always emerge from conducting
the concrete exercise.
Computer-based training opens new possibilities
for conducting tabletop exercises. The method we
use for computer-based training is based on
representing individuals or groups of individuals as
agents, where an agent is defined as an entity that is
(a) reactive; (b) proactive; (c) social; and (d) situated
in some environment. The particular training
scenario emerges from agents' activities, thus - by
tuning agent's behaviour one can tune the simulation
behaviour.
A clear advantage of this method is that
training doesnot depend on the number of trainees
because some roles in training can be played by
software agents and one or more roles – by trainees.
Moreover, with this kind of training, we can also
explore experiments with different psychological
profiles of trainees played by software agents. As a
result, we can create many different team setups and
embed a trainee or trainees in them. There is no
tabletop exercise that can provide this kind of
experience. In a tabletop exercise, the goals to be
achieved by the scenario, as well as the activities to
be performed by different participants and the
criteria for evaluating these activities should be
clearly outlined. As it has been pointed out in
(Vattam et al., 2011), preparation of training
scenarios rooted in agent-based simulation, starting
from agents themselves, requires a proper
conceptualization of the problem domain at hand.
This paper proposes a method of conceptual
modelling for computer-based training, where the
training scenarios are created based on a set of
conceptual models. The method is overviewed in
Section 2. The process of conceptual modelling is
described in Section 3 by elaborating an example
from (Shvartsman et al., 2010). Finally, conclusions
are presented in Section 4.
443
Shvartsman I., Taveter K. and Meriste M..
A Method of Conceptual Modelling for Realistic Training Scenarios.
DOI: 10.5220/0004333404430446
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 443-446
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
2 THE METHOD
The method that we use for conceptual modelling
for realistic training scenarios is agent-oriented
modelling (Sterling and Taveter, 2009). We prefer
this method over other alternatives because it
straightforwardly enables to model a system of goals
to be achieved by a training scenario, as well as the
activities to be performed by players in the scenario
different participants and the criteria for evaluating
these activities should be clearly outlined. We also
have a lot of positive anecdotal experience of
applying AOM in the related domain, where AOM
was successfully applied for developing a training
resource to teach secondary school students to
respect people with Asperger’s Syndrome.
Agent-oriented modelling is an approach for
modelling and simulating the behaviours of complex
socio-technical systems where a problem domain is
first conceptualized in terms of the goals to be
achieved by the system, the roles required for
achieving them, and the domain entities embodying
the required knowledge. The roles are thereafter
mapped to the agents playing the roles, the goals – to
the activities performed by the agents, and the
domain entities – to the items of knowledge held by
the agents. As we are concerned with “human-in-
the-loop” simulations, the term “agent” subsumes
both human agents and man-made agents –
softwareagents simulating humans. Conceptually,
we consider models as abstractions reducing the
complexity of a system for better understanding of
the system’s particular aspects and their impact on
its behaviour.
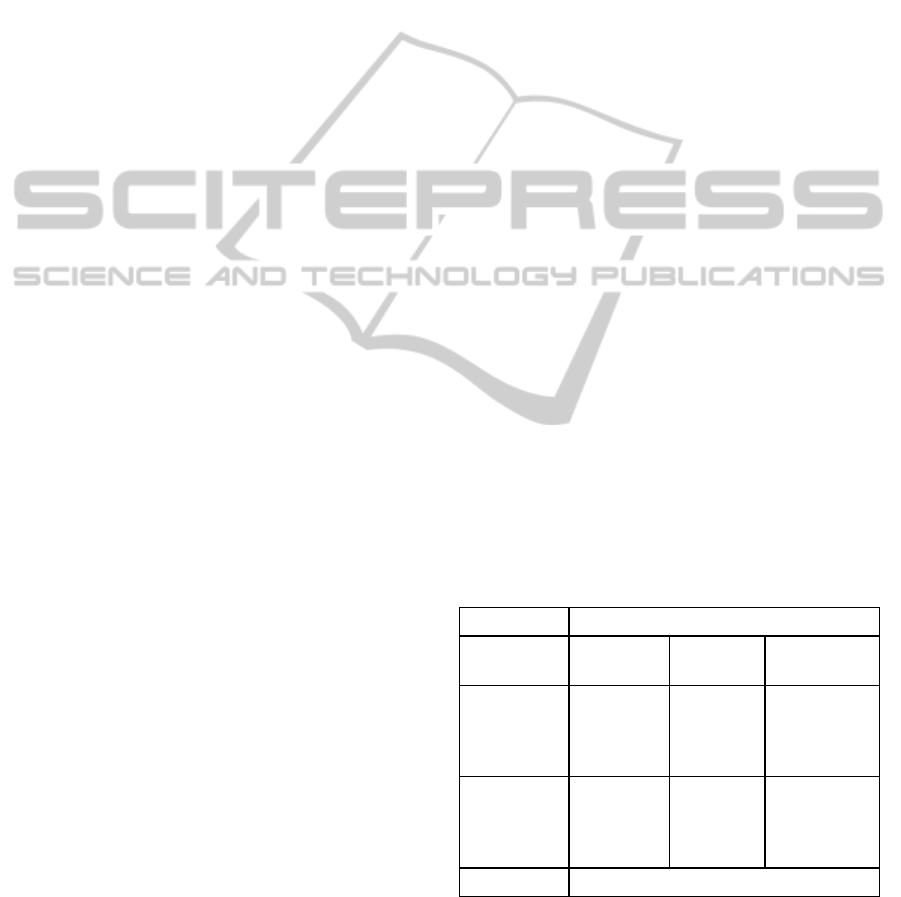
The types of models proposed by agent-oriented
modelling (AOM) are represented in Table 1. In
addition to representing for each model the
abstraction layer (analysis, design, or simulation),
Table 1 maps each model to the vertical viewpoint
aspect of interaction, information, or behaviour.
Each cell in the table represents a specific viewpoint.
We will next give an overview of agent-oriented
models relevant for understanding this article
proceeding by viewpoints. These models are
distinguished by using a bold font in Table 1.
From the viewpoint of behaviour analysis, a goal
model can be considered as a container of three
components: goals, quality goals, and roles (Sterling
and Taveter, 2009). A goal is a representation of a
functional requirement for the simulation system,
describing the phenomenon or process to be
simulated. A quality goal, as its name implies, is a
non-functional or quality requirement of the system.
Goals and quality goals can be further decomposed
into smaller related subgoals and subquality goals.
The hierarchical structure is to show that the
subcomponent is an aspect of the top-level
component. Goal models also determine roles that
are capacities or positions that agents playing the
roles need to contribute to achieving the goals. The
notation for representing goals and roles is shown in
Table 2 (Sterling and Taveter, 2009).
From the viewpoint of interaction analysis, the
properties of roles are expressed by role models. A
role model describes the role in terms of the
responsibilities and constraints pertaining to the
agent(s) playing the role.
From the viewpoint of interaction design,
interaction models represent interaction patterns
between agents of the given types. They are based
on responsibilities defined for the corresponding
roles. In this paper, we represent interaction models
by means of action events and non-action events. An
action event is an event that is caused by the action
of an agent, like sending a message or starting a
machine. An action event can thus be viewed as a
coin with two sides: an action for the performing
agent and an event for the perceiving agent. A
message is a special type of action event—
communicative action event—that is caused by the
sending agent and perceived by the receiving agent.
On the other hand, there are non-action events that
are not caused by actions. Non-action events include
exogenous events. An exogenous event is a kind of
event whose creating agent we are not interested in.
Finally, from the viewpoint of behaviour design
,
behaviour models describe the behaviours of
individual agents (Sterling and Taveter, 2009).
Table 1: The Model Types of Agent-Oriented Modelling.
Viewpoint aspect
Abstraction
layer
Interaction Information Behaviour
Analysis
Role
models and
organization
model
Domain
model
Goal models
and
motivational
scenarios
Design
Agent
models and
interaction
models
Knowledge
models
Scenarios and
behaviour
models
Simulation Platform-specific models
3 CONCEPTUAL MODELLING
In this section we show how a trainingscenario that
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
444
has been used, assessed, and elaborated in
numerous psychological experiments (Parmak et al.,
2010) can be conceptually modelled by AOM for
computer-based simulations with emergent
behaviour. The firstmodel to be created is the goal
model that determines the overall purpose of the
simulation and its subgoals. This model serves to
discuss the purpose of the simulation with all the
stakeholders involved: military commanders and
experts, trainers, trainees, adventure games’experts,
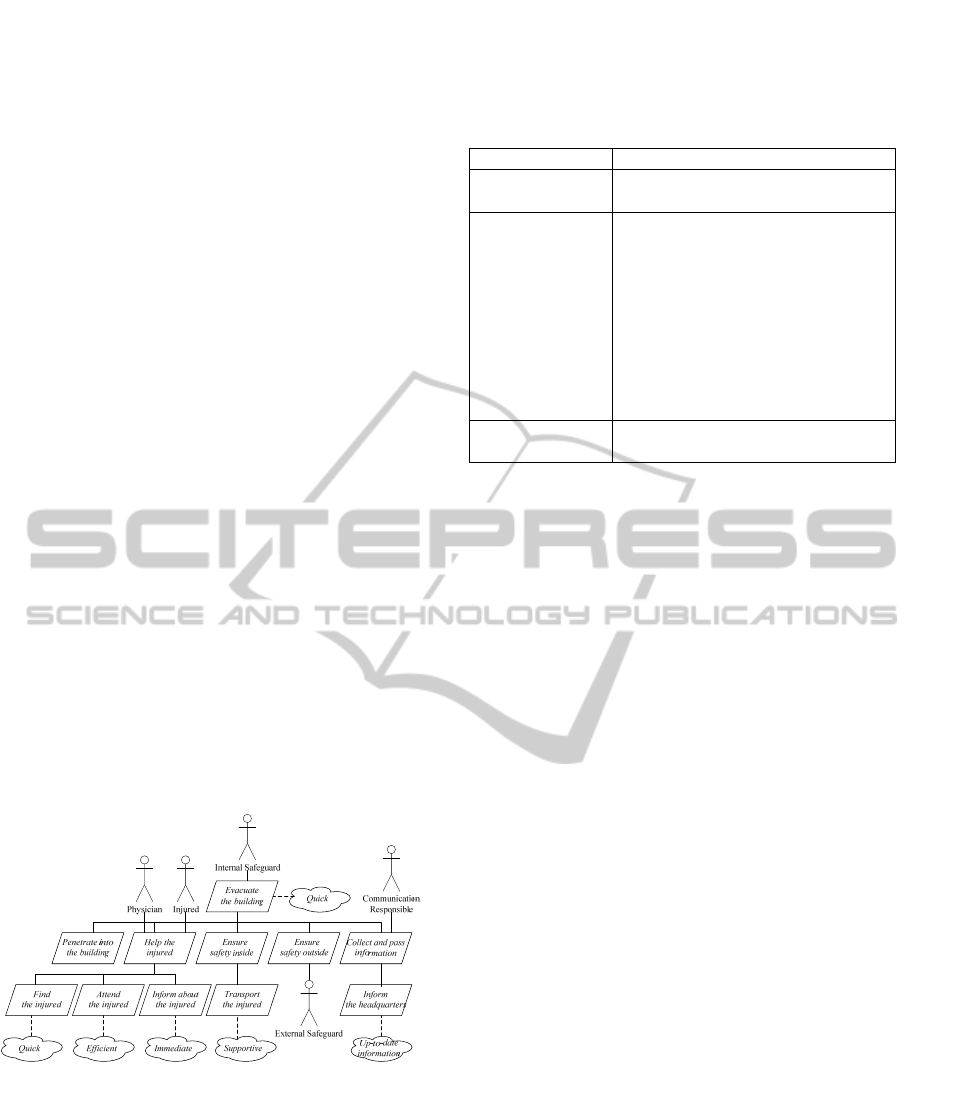
etc. As is reflected by Figure 1, the overall purpose
of the simulation is to evacuate the building.
Achieving the purpose can be divided into the
following subgoals, each of which represents a
particular aspect of the evacuation: penetrate into the
building, help the injured, ensure safety inside,
ensure safety outside, and collect and pass
information. Each subgoal can, in turn, be divided
into third-level subgoals. Figure 1 represents the
refined subgoals for the “Help the injured” subgoal.
For clarity, the other subgoals are elaborated in
separate figures which we do not present here
because of space constraints. Achieving a goal may
be characterized by a quality goal which in the given
context represents the criteria for evaluating the
extent to which the goal in the simulation has been
achieved. The goal model also shows the roles that
are required for achieving the goals of the simulation
scenario. The roles are separately modelled further
on in this section.
Figure 1: The goal model for the urban operation.
As was described in Section 3, the roles are
described in terms of the responsibilities and
constraints applying to the agents that will perform
the roles. Because of the scope of this paper, we
present in Table 2 only the model of the roles
External Safeguard.
Having defined the goals for the scenario to be
simulated and the roles comprised by the scenario,
we can start designing simulations in such a way that
any role in the simulation system could be
Table 2: The Role Model of External Safeguard.
Role name External Safeguard
Description The role of the external safeguard
of the building during the operation
Responsibilities Ensure safety outside the building
Inform the Communication
Responsible about any potential
threats
Receive the injured from the
Internal Safeguard along with the
instructions
Inform the Communication
Responsible about the injured
received and the instructions
Constraints Quick, efficient, informed, and
helpful behaviour
performed by either a human agent or a software
agent. This enables to perform training simulations
in teams of any size and evaluate the performance of
individual human agents. We illustrate platform-
independent design by presenting in Figure 2 an
interaction model for the scenario. The interaction
model depicted in Figure 2 includes the roles of
three purposeful agents – External Safeguard,
Internal Safeguard, and Communication Responsible
– whose goals comply with the goals set for the
simulation scenario by the goal and role models. In
addition, the interactions involve the role Physician
that is not represented in this figure. Corresponding
to the notation represented in Figure 1 and according
to the explanations provided in Section 3, the
interaction model represents the interactions
between agents performing the above-mentioned
roles as action events. In addition, the interaction
model includes two non-action events representing
the cave-in and appearance of strangers.
Distinguishing between action events and non-action
events is crucial in the simulation of military
operations. We have decided to model the non-
action events as exogenous events because both of
them are generated by the simulation environment.
Please note that the notation used in Figure 2 does
not prescribe any order for the occurrence of events.
The behaviour of an agent playing the role of
External Safeguard can be described by rules, such
as the following ones:
ON Strangers THEN Inform Communication
Responsible
ON Strangers THEN Wait N Sec; Inform
Communication Responsible
ON Strangers THEN Engage Strangers
ON Strangers THEN Take Strangers
Hostage
ON Strangers THEN Interrogate and
Search Strangers
AMethodofConceptualModellingforRealisticTrainingScenarios
445
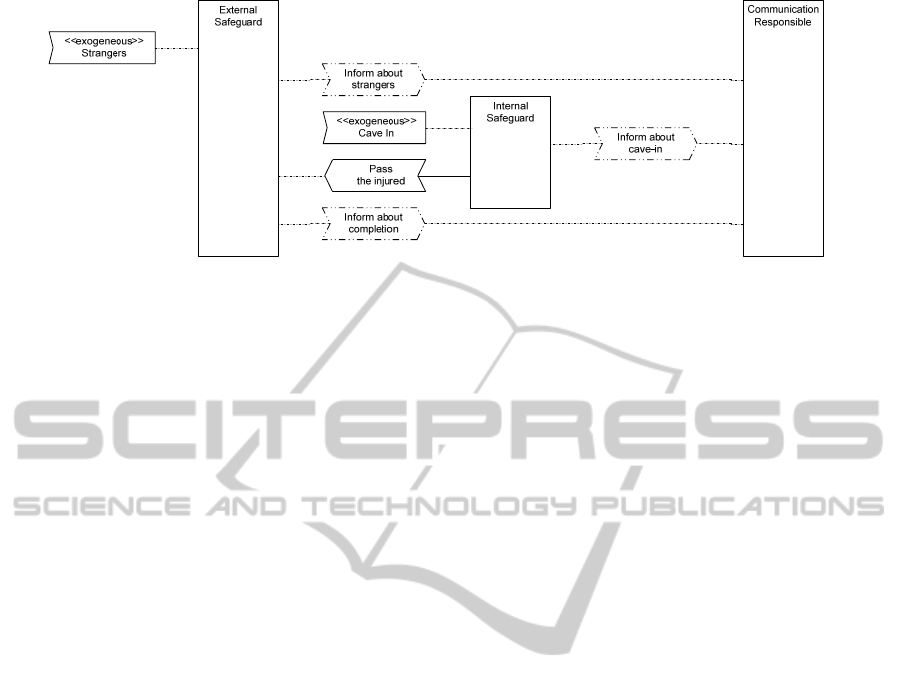
Figure 2: Interaction model for the scenario to be simulated.
The first two and the last three rules presented
above are to be applied as alternatives rather than in
parallel. For example, upon the appearance of
strangers, an agent performing the External
Safeguard role may inform another agent playing the
Communication Responsible role right away or only
after waiting for a specified number of seconds.
Similarly, the same agent may react to the
appearance of strangers in one of the following three
ways: (a) engage strangers right away, that is, open
fire at them; (b) take strangers hostage “just in case”;
(c) interrogate and search strangers on the spot.
What alternatives are chosen also depends on the
psychological profiles of the simulated agents. How
the profile can be represented and how it influences
agent behaviour depends on platform-specific
design, that is, on the agent architecture and
platform chosen. This will be described in our future
papers.
4 CONCLUSIONS
Conceptual modelling is of crucial importance for
developing appropriate training scenarios for
complex social processes such as addressing
asymmetric threats in a city environment or winning
hearts and minds. We demonstrated how a training
scenario can be developed by means of AOM. In
these kinds of training scenarios, emergent
behaviour can occur at least in one of the following
two ways: (a) through different latencies of
simulated exogenous events; (b) through different
alternative behaviours of participating agents and the
combinations of their behaviours and interactions. In
our future work, we will demonstrate how a family
of training scenarios can be generated from
conceptual models based on agents’ behavioural and
interaction patterns.
ACKNOWLEDGEMENTS
This research was supported by European Social
Fund´s Doctoral Studies and Internationalization
Programme DoRa.
REFERENCES
Sterling, L., Taveter, K., 2009. The art of agent-oriented
modeling, MIT Press. London.
Shvartsman, I., Taveter, K., Parmak,M., Meriste, M., 2010.
Agent-oriented modelling for simulation of complex
environments. In IMCSIT 2010, The International
Multiconference on Computer Science and
Information Technology, IEEE Computer Society, 209-
216.
Vattam, S. S., Goel, A. K., Rugaber, S., 2011. Behavior
patterns: Bridging conceptual models and agent-based
simulations in interactive learning environments. In
IEEE 11th International Conference on Advanced
Learning Technologies, 139-141.
Parmak, M., Mylle, J. J. C., Euwema, M. C., 2010.
Personality and the perception of situational structuredness
in a military environment: Seeking and enjoying
sensation versus structure as a soldier. Journal of
Applied Social Psychology (accepted).
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
446
