
Grateful Agents and Agents that Hold a Grudge
∗
The Role of Affective Behaviors in Sustained Multi-agent Interactions
C´esar F. Pimentel
INESC-ID and Instituto Superior T´ecnico, UTL
Av. Prof. Dr. An´ıbal Cavaco Silva, 2744-016 Porto Salvo, Portugal
Keywords:
Affective Computing, Multi-agent Interactions, Emotions, Anger, Gratitude.
Abstract:
Interactions among self-interested agents present classical challenges concerning cooperation and competi-
tiveness. Cooperative behavior may be unappealing if unilateral cooperation represents a loss, and adverse
behavior may be difficult to avoid if one agent’s losses imply another agent’s gains. Agents could benefit
from mechanisms that promote cooperation and dissuade adverse behaviors. We propose a generic approach,
where such mechanisms can emerge from the simulation of affective behaviors that are associated with the
human emotions of gratitude and anger. These emotions define implicit contracts about predefined patterns
of behavior that agents are capable of following, and recognizing in each other. We use a few examples to
illustrate how this approach can help an agent persuade another to cooperate and become an ally, or dissuade
it from adopting adverse behavior, as a result of rational decisions.
1 INTRODUCTION
In societies of self-interested agents, individual be-
haviors are typically a result of two driving forces:
cooperation and competitiveness. Examples of these
agent societies can be found in domains such as com-
puter supported cooperative work (Baecker, 1993),
electronic commerce negotiation (Kephart and Green-
wald, 2002), virtual environments (including video
games), social simulations (Gilbert and Conte, 1995;
Gilbert and Doran, 1994; Moss and Davidson, 2001),
among others (Jennings and Wooldridge, 1998).
In such domains, it is often challenging to de-
sign agents that behave efficiently: In scenarios where
unilateral cooperation represents a loss, and an agent
has no guarantee that another agent will also coop-
erate, cooperating might seem unreachable when it
is seen as an irrational course of action; in competi-
tive scenarios where an agent’sloss representsanother
agent’s gain, an agent must carefully manage its use
of adverse behaviors while trying to avoid the adverse
behaviors of other agents.
In the first type of scenarios, agents could benefit
from a mechanism that promotes mutual cooperation.
In the second type of scenarios, agents could benefit
∗
This work was supported by national funds through
FCT - Fundac¸˜ao para a Ciˆencia e a Tecnologia, under
project PEst-OE/EEI/LA0021/2011.
from a mechanism that dissuades others from adopt-
ing adverse behaviors. In this paper we argue that
specific affective aspects of human behavior can be
simulated, to produce such mechanisms, in the con-
text of sustained multi-agent interactions.
In particular, we suggest that if an agent behaves
in consistence with the emotion of gratitude and an-
other agent recognizes this type of behavior, mutual
cooperation may start occurring, as a result of rational
decisions, in situations where it would otherwise not
occur. In addition, we suggest that if an agent behaves
in consistence with the emotion of anger, “holding
a grudge” against another agent that recognizes this
type of behavior, future adverse behaviors may be
prevented, as a result of rational decisions. This, in
fact, corresponds to reproducing the roles that these
two emotions play on human social interactions.
There are other ways of addressing the challenges
concerning cooperation and competitiveness, such as
using program equilibrium (Tennenholtz, 2004). In
many environments, however, such approaches can-
not be used because program strategies are not avail-
able, mediators do not exist, or communication is not
possible. Our approach can be used in such environ-
ments and, because it is inspired in human behavior,
it is expected to simultaneously be effective and more
accurately simulate human behavior.
324
F. Pimentel C..
Grateful Agents and Agents that Hold a Grudge - The Role of Affective Behaviors in Sustained Multi-agent Interactions.
DOI: 10.5220/0004334003240329
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 324-329
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 COOPERATION AND
COMPETITIVENESS
A common problem in multi-agent systems is how
to get agents to cooperate when each agent is self-
interested and has no guarantee that others will co-
operate as well. A classical example from game the-
ory, that illustrates this problem, is known as the Pris-
oner’s Dilema (Tucker, 1950; Straffin, 1980).
We recall that in the prisoner’s dilemma two
agents must separately choose to either cooperate or
defect. Each agent obtains best payoffs by defecting,
both when the other agent defects and when it coop-
erates. Defecting is, therefore, the dominant strategy
and, consequently, the rational course of action for
both agents. However, if the agents would both coop-
erate, instead of defecting, they would obtain higher
payoffs.
In game theory terms, one can say that utility is
being wasted because the outcome where both agents
defect is not Pareto efficient; there is an outcome with
higher payoffs for both of the agents. The problem is
that, to achieve this outcome, the agents must appar-
ently act irrationally.
When scenarios include more than two interact-
ing agents, the problem of cooperation becomes even
more interesting. In addition to the question of
whether or not to cooperate, there is also the question
of whom to cooperate with. Teaming up and form-
ing implicit alliances is often the way to obtain the
highest payoffs (for the allied agents, obviously). The
problem, again, is that an agent is never sure that the
other will cooperate and act as an ally.
Besides cooperation, another important issue in
multi-agent interactions is competitiveness. In par-
ticular, we are interested in addressing the problem of
making an agent successful in scenarios where other
agents may act adversely, to increase their own pay-
offs. The question we address here is: How can
an agent dissuade other agents from acting in ways
that decrease that agent’s payoff? In interactions be-
tween two agents, being cooperative or being non-
aggressive may be seen as the same concept, but that
is not the case when we consider interactions with
more than two agents.
3 GRATITUDE AND ANGER
We start this section with a personal story, to help
illustrate the motivation for the ideas in this article.
A group of five friends, occasionally, used to play a
board game of military strategy. In this game, each
player starts out with control over certain territories,
and may attack the territories of other players to gain
control over them. It is important to note that there
is often more than one way for a player to win the
game, so one usually has flexibility in choosing one’s
goal territories.
The first time that the game was played, one of the
players, David, displayed a behavior typically known
as “holding a grudge”; when he was attacked by an-
other player he retaliated and continued attacking that
player, repeatedly, until the end of the game, even in
situations where such attacks did not seem to be ad-
vantageous, for David. In the end, both David and his
initial attacker failed to win the game, but this was not
the end of the story.
In subsequent, games David continued displaying
behaviors consistent with the personality of someone
that easily “holds a grudge” against whoever attacks
him. The other players quickly realized this and (de-
spite finding amusing to show anger in the context of
a game) started being biased against attacking David,
because being the target of his constant attacks makes
the task of winning the game a difficult one. Players
did not entirely stop attacking David, but they started
taking his personality into account when choosing
which opponent to attack. This gave David a great ad-
vantage in the game, because he was rarely attacked.
David’s emotional behavior might be seen as irra-
tional, in the sense that he typically fails to win the
game when he decides to continuously attack a spe-
cific player until the end of that game. However, if
we consider the long term effects of his behavior over
a sequence of games, we conclude that it is a ratio-
nal behavior, because it gives him an advantage over
the other players, increasing his chances of wining
games.
“Holding a grudge” is an affective behavior asso-
ciated with the emotion of anger. In the appraisal the-
ory of emotions known as OCC (Ortony et al., 1988),
anger is the emotion that results from an event that has
undesired consequences for oneself and was caused
by the actions of another agent. Conversely, when an
event caused by the actions of another agent has de-
sired consequences for oneself, the resulting emotion,
according to OCC, is gratitude.
Just like anger was useful to David in a compet-
itive situation, so can gratitude be useful to promote
cooperation. For instance, consider a situation where
helping someone makes you slightly worse off but
greatly improvesthe other person’s situation, and vice
versa. Helping would be irrational, if it had no future
implications. But if the person that is helped behaves
grateful and returns the favor, then mutual coopera-
tion can be initiated and both people will benefit. In
the strategy board game, this could lead to the appear-
GratefulAgentsandAgentsthatHoldaGrudge-TheRoleofAffectiveBehaviorsinSustainedMulti-agentInteractions
325

ance of unofficial alliances among players.
It is important to notice that for anger and grat-
itude to have the effects described above, it is nec-
essary that the affective nature of one’s behavior is
recognized by others and attributed to one’s personal-
ity. David would not have been successful if the other
players would not have realized that he is acting out
of anger and that his personality is of someone that
easily holds a grudge.
4 GRATEFUL AGENTS AND
AGENTS THAT HOLD A
GRUDGE
From the point of view of Affective Computing (Pi-
card, 1997), human emotional phenomena are a
promising source of inspiration to address problems
in Artificial Intelligence, because such phenomena are
generally helpful to humans (Dam´asio, 1994; Frijda
et al., 2000). In this paper we propose that, just as
humans benefit from acting on anger or gratitude, ar-
tificial agents may also benefit from adopting such be-
haviors, in the context of sustained multi-agent inter-
actions. In particular, we propose that behaving grate-
ful may promote mutual cooperation while “holding
a grudge” may dissuade other agents from acting ad-
versely.
To achieve the discussed effects, we propose that
agent architectures contemplate three key abilities:
Affective Behavior. The ability to decide and act in
congruence with an emotion. In particular, when
an agent’s situation is improved by the actions of
another agent, it should act in congruence with
gratitude, by returning the favor (possibly more
than once); when an agent’ssituation is harmed by
the actions of another agent, it should act in con-
gruence with anger, by retaliating (possibly more
than once).
Identification of Affective Behavior. The ability to
identify that another agent’s actions are the re-
sult of an affective state, and associate, with that
agent’s personality, the predisposition for such
affective behaviors. This ability is within the
scope of a theory of mind (Baron-Cohen, 1995),
i.e. the ability to attribute mental states to one-
self and others. In particular a simplistic theory
of mind is required, to identify the gratitude and
anger-congruent behaviors described in the previ-
ous item.
Reasoning about Personality. The ability to make
decisions that account for the other agents’ per-
sonalities. Based on the aspects of personality that
were identified according to the previous item, the
agent should be able to extrapolate and predict
the behaviors of other agents under certain con-
ditions. These predictions should be taken into
account when deciding the best course of action.
In the next sections we present examples of using
this approach, to illustrate its potential benefits. In
Section 4.1 we use two scenarios that focus on grati-
tude behaviors, one with two agents and another with
three agents. Analogously, in Section 4.2 we use two
scenarios that focus on anger behaviors, one with two
agents and another with three agents. All scenarios
are presented using the common terminology of game
theory.
4.1 Examples with Gratitude
Consider the situation where each of two agents must
choose between the actions of helping the other agent
and running away. Helping requires a small effort
(decreasing the helper’s utility by 1), but greatly im-
proves the other agent’s situation (increasing it’s util-
ity by 2). Running, on the other hand, doesn’t affect
any of the agents’ utility. The resulting payoff matrix,
for agents i and j is presented in Table 1.
Table 1: Payoff matrix for the gratitude 2-agents example.
Utilities are shown in the order (u
j
, u
i
), where u
x
is the
utility for agent x.
i runs i helps
j runs 0, 0 2, −1
j helps −1, 2 1, 1
Notice that running is a dominant strategy (i.e.,
a strategy that guarantees the highest payoff for the
agent, no matter what the other agent chooses to do).
Consequently, there is one Nash equilibrium, marked
in bold, where both agents decide to run. The problem
corresponds to the well known prisoner’s dilemma,
because running seems to be the rational option but if
both agents would cooperate (help), they would both
get higher payoffs.
Now we consider several hypothetical interac-
tions, in the above scenario, organized in sets of 10
rounds. For these interactions, we consider that agent
i is prone to act on gratitude, when helped, and agent
j has the ability to identify this in i’s personality and
to make decisions accordingly (see the proposed abil-
ities in Section 4). Table 2 illustrates these hypotheti-
cal interactions.
In the first set of interactions both agents start by
running, but once j decides to help, i returns the favor
twice. j realizes that i probably acted on gratitude,
and predicts that it may repeat that behavior when
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
326
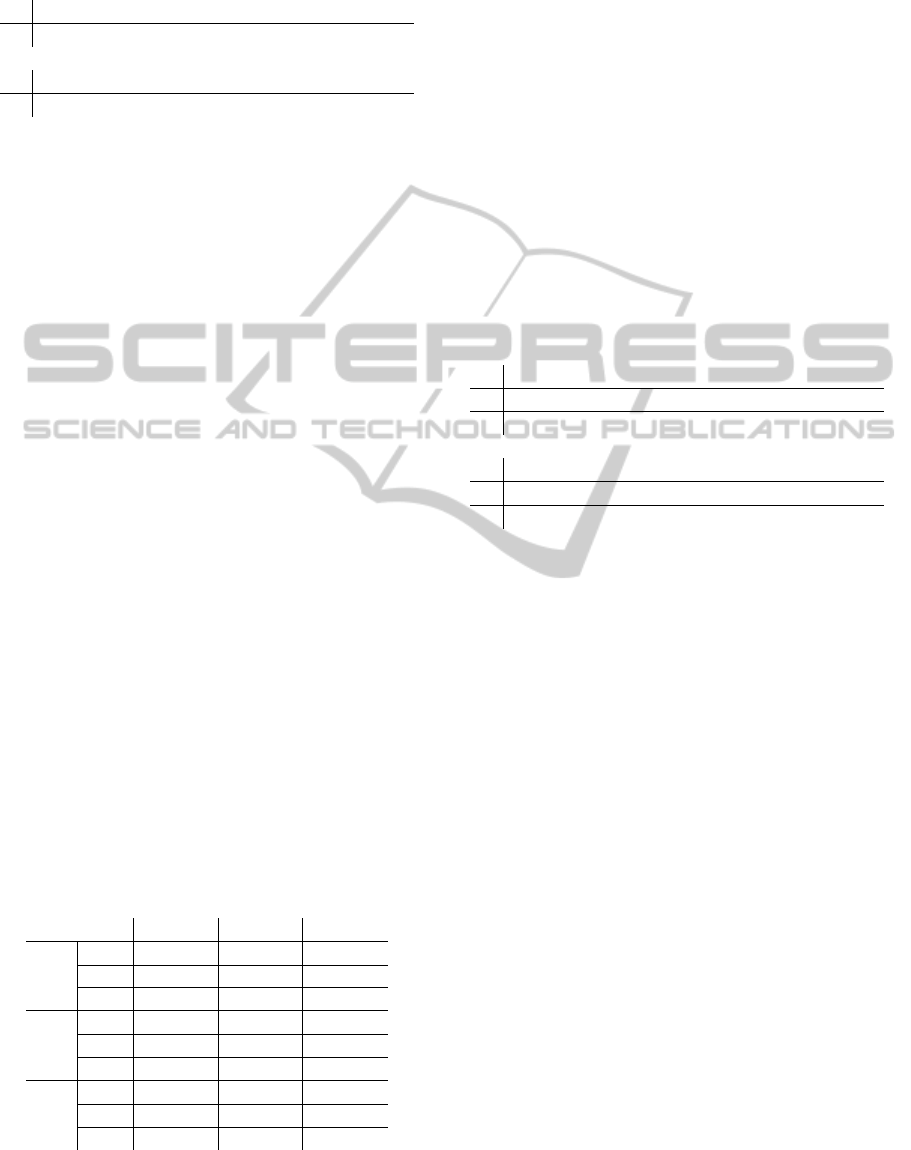
Table 2: Sets of 10-rounds interactions of the gratitude 2-
agents example. R denotes running and H denotes helping.
Set #1
i R R R H H R R H H H
j R R H R R R H H H H
Set #2 and subsequent sets
i R H H H H H H H H H
j H H H H H H H H H H
helped. Having this assumption, the rational behav-
ior is to help because mutual help has a higher payoff
(1) than the one that is obtained when both agents run
(0). As a result, both agents help each other until the
end of the set, and may continue doing so in the sec-
ond and following sets, because j takes i’s personality
into account, when making decisions.
Now let us consider a military scenario that in-
volves three agents. Each agent must choose to either
build, improving the value of its territory, or support
one of the other agents, by sending troops that help
that agent in defense and attack situations. Support-
ing improves the supported agent’s situation with no
apparent gain to the supporting agent; but when two
agents support each other, they perform a successful
attack on the remaining agent’s territory, greatly im-
proving the situation of the attacking agents at the ex-
pense of the attacked agent. The actions affect the
agents’ utilities in the following ways:
• When an agent builds, its utility is increased by 1.
• When an agent x supports another agent y, and y
does not support x, the utility of y is increased by
1.
• When two agents support each other, their utili-
ties are increased by 2 and the remaining agent’s
utility is decreased by 2.
The resulting payoff matrix, for agents i, j and k
is presented in Table 3.
Table 3: Payoff matrix for the gratitude 3-agents example.
Utilities are shown in the order (u
k
, u
j
, u
i
), where u
x
is the
utility for agent x. B denotes the action of building and S
x
denotes the action of supporting agent x.
j B j S
k
j S
i
i B
k B 1, 1, 1 2, 0, 1 1, 0, 2
k S
i
0, 1, 2 1, 0, 2 0, 0, 3
k S
j
0, 2, 1 2, 2, −1 0, 1, 2
i S
j
k B 1, 2, 0 2, 1, 0 −1, 2, 2
k S
i
0, 2, 1 1, 1, 1 −2, 2, 3
k S
j
0, 3, 0 2, 3, −2 −2, 3, 2
i S
k
k B 2, 1, 0 3, 0, 0 2, 0, 1
k S
i
2, −1, 2 3, −2, 2 2, −2, 3
k S
j
1, 2, 0 3, 2, −2 1, 1, 1
There are four Nash equilibria, marked in bold,
one where all agents build and three where two of
the agents support each other. From these equilibrium
states, mutual cooperation seems to be the best option
for the two agents that support each other. The prob-
lem is that there are no alliances defined, so an agent
does not know whom to expect mutual cooperation
from.
Now we consider several hypothetical interac-
tions, in the above scenario, organized in sets of 10
rounds. For these interactions, we consider that agent
i is prone to act on gratitude, when supported, and
agent j has the ability to identify this in i’s personality
and to make decisions accordingly. Table 4 illustrates
these hypothetical interactions.
Table 4: Sets of 10-rounds interactions of the gratitude 3-
agents example. B denotes the action of building and S
x
denotes the action of supporting agent x.
Set #1
i B B B B S
j
S
j
S
j
S
j
S
j
S
j
j B B B S
i
B B S
i
S
i
S
i
S
i
k B B B B B B B B B B
Set #2 and subsequent sets
i B S
j
S
j
S
j
S
j
S
j
S
j
S
j
S
j
S
j
j S
i
S
i
S
i
S
i
S
i
S
i
S
i
S
i
S
i
S
i
k B B B B B B B B B B
In the first set of interactions all agents start by
building, but once j decides to support i, i starts re-
turning the favor. j realizes that i is probably acting on
gratitude, and predicts that it will maintain this behav-
ior continuously if j also does. Having this assump-
tion, j’s rational choice is to support i, because mutual
cooperation has a higher payoff (2) than the one that
is obtained when the agents build (1). As a result, i
and j establish an implicit alliance, at the expense of
k. This alliance extends to the end of the set, and may
continue to the second and following sets, because j
takes i’s personality into account, when making deci-
sions.
4.2 Examples with Anger
Consider a military scenario where each of two agents
must choose between the actions of building and con-
quering. Building slightly improves the value of one’s
territory (increasing the one’s utility by 1). Conquer-
ing consists of stealing a part of the opponent’s terri-
tory (increasing one’s utility by 2 and decreasing the
opponent’s utility by 2). The resulting payoff matrix,
for agents i and j is presented in Table 5.
Notice that conquering is a dominant strategy.
Consequently, there is one Nash equilibrium, marked
in bold, where both agents decide to conquer. Just
as was the case with the gratitude 2-agents example,
GratefulAgentsandAgentsthatHoldaGrudge-TheRoleofAffectiveBehaviorsinSustainedMulti-agentInteractions
327
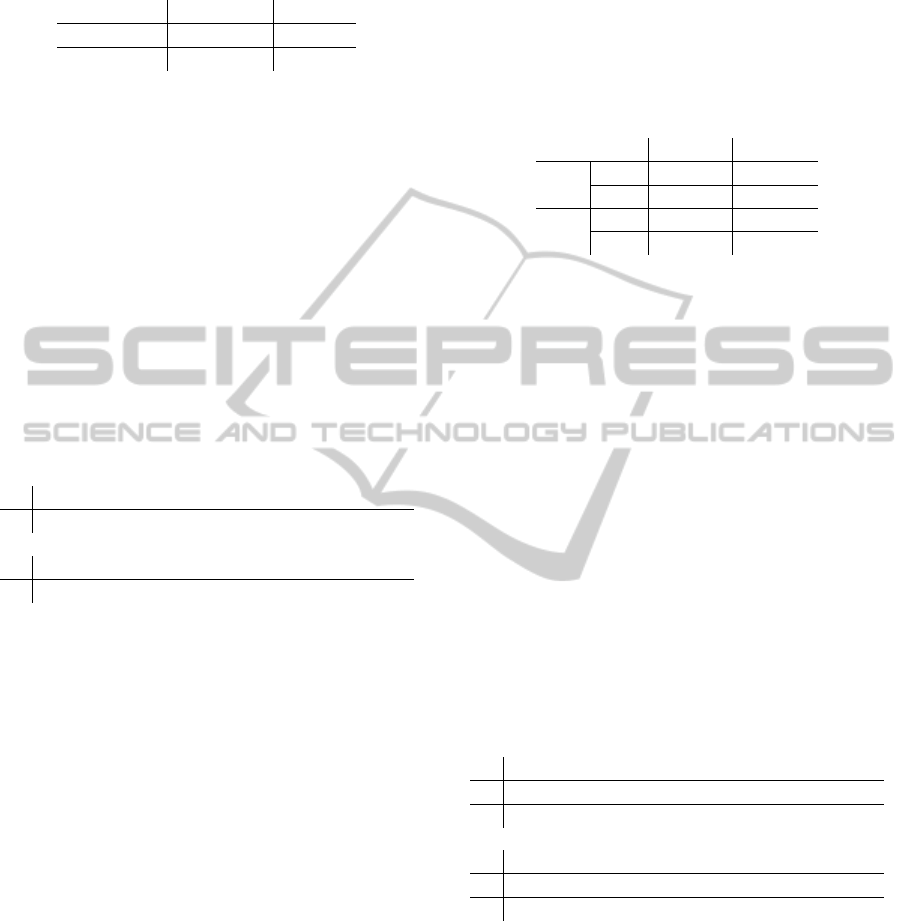
Table 5: Payoff matrix for the anger 2-agents example. Util-
ities are shown in the order (u
j
, u
i
), where u
x
is the utility
for agent x.
i conquers i builds
j conquers 0, 0 2, −1
j builds −1, 2 1, 1
in Section 4.1, this problem corresponds to the pris-
oner’s dilemma (in fact, the payoffmatrices of the two
scenarios are exactly the same). Conquering seems to
be the rational option but if both agents would coop-
erate (build), they would both get higher payoffs.
Now we consider several hypothetical interac-
tions, in the above scenario, organized in sets of 10
rounds. For these interactions, we consider that agent
i is prone to act on anger, “holding a grudge” against
whoever conquers from its territory, and agent j has
the ability to identify this in i’s personality and to
make decisions accordingly. Table 6 illustrates these
hypothetical interactions.
Table 6: Sets of 10-rounds interactions of the anger 2-agents
example. B denotes building and C denotes conquering.
Set #1
i B B B B C C C C C C
j B B B C B B C B B C
Set #2 and subsequent sets
i B B B B B B B B B B
j B B B B B B B B B B
In the first set of interactions both agents start by
building, but once j decides to conquer, i retaliates
and attacks j (i.e. conquers) until the end of the set.
j realizes that i probably acted on anger, and predicts
that it might do so again in the next sets, if j decides
to conquer again. Having this assumption, j knows
that aiming for a payoff of 2 (when j conquers and i
builds) is a lost cause because, at most, it could only
be obtained once in a set. So, as long as i keeps build-
ing, j might as well aim for mutual cooperation (when
both agents builds) that has a higher payoff (1) than
the one that is obtained when both agents conquer (0).
As a result, both agents cooperate (build) during the
second and following sets, because j takes i’s person-
ality into account, when making decisions.
Now let us consider another military scenario,
this time involving three agents, where each must
choose to conquer land from one of its two adver-
saries. Agents are positioned in a circular fashion,
where k is at the left-hand side of j, j is at the left-
hand side of i, and i is at the left-hand side of k. Con-
quering improves the situation of an agent, even more
so if the agent is conquering from its left-hand side
opponent (the utility is increased by 2 when conquer-
ing from the right-hand side opponent, and by 3 when
conquering from the left-hand side opponent). This
action harms the situation of the conquered agent (de-
creasing its utility by 2). The resulting payoff matrix,
for agents i, j and k is presented in Table 7.
Table 7: Payoff matrix for the anger 3-agents example. Util-
ities are shown in the order (u
k
, u
j
, u
i
), where u
x
is the util-
ity for agent x. C
x
denotes the action of conquering from
agent x.
j C
k
j C
i
i C
j
k C
i
1, 1, 1 3, 0, −1
k C
j
0, −1, 3 2, −2, 1
i C
k
k C
i
−1, 3, 0 1, 2, −2
k C
j
−2, 1, 2 0, 0, 0
Notice that conquering from one’s left-hand side
opponent is a dominant strategy. Consequently, there
is one Nash equilibrium, marked in bold, where i con-
quers from j, j conquers from k, and k conquers from
i. An agent can hope to get a higher payoff, of 2 or
3, if it is not attacked (i.e. conquered) by any of the
other agents. The problem is that in order to achieve
this, its right-hand side opponent must be dissuaded
from following its dominant strategy.
Now we consider several hypothetical interac-
tions, in the above scenario, organized in sets of 10
rounds. For these interactions, we consider that agent
i is prone to act on anger, “holding a grudge” against
whoever conquers from its territory, and agent k has
the ability to identify this in i’s personality and to
make decisions accordingly. Table 8 illustrates these
hypothetical interactions.
Table 8: Sets of 10-rounds interactions of the anger 3-agents
example. C
x
denotes the action of conquering from agent x.
Set #1
i C
j
C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
j C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
k C
i
C
i
C
j
C
j
C
j
C
i
C
i
C
i
C
i
C
i
Set #2 and subsequent sets
i C
j
C
j
C
j
C
j
C
j
C
j
C
j
C
j
C
j
C
j
j C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
C
k
k C
j
C
j
C
j
C
j
C
j
C
j
C
j
C
j
C
j
C
j
In the first set of interactions each agent starts by
conqueringfrom its left-hand side opponent (the dom-
inant strategy). But since k conquers from i, right in
the first round, i retaliates and attacks k (i.e. conquers
from k) until the end of the set. k realizes that i prob-
ably acted on anger, and predicts that it might do so
again in the next sets, if k decides to conquer from i
again. Having this assumption, k is better off conquer-
ing from j than from i, because the extra utility that is
obtained in conquering from i (1) does not compen-
sate for the loss of utility suffered when i retaliates
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
328

(2). As a result, both i and k attack jduring the sec-
ond and following sets, because k takes i’s personality
into account, when making decisions.
We highlight the fact that i’s behavior in the first
set might seem irrational, because conquering from k
produces less utility than conquering from j (the dom-
inant strategy). But, in the long run, i gained a clear
advantage, because it did not suffer any attacks during
the next sets, obtaining always the payoff of 3.
5 CONCLUSIONS
We revisit classical challenges concerning coopera-
tion and competitiveness, in interactions that involve
self-interested agents. We propose an approach, to
these challenges, inspired in human affective behav-
iors, attempting to reproduce the beneficial roles that
the emotions of gratitude and anger play in human
social interactions. In our approach we propose that
agent architectures contemplate simplistic approaches
to a) producing affective behavior, b) recognizing af-
fective behavior, and c) reasoning about personality.
We used this approach in four examples, to show
how a) acting on gratitude can promote cooperation
and help form alliances among agents, and b) act-
ing on anger can also promote cooperation, as well as
dissuade other agents from having adverse behaviors
toward the agent in question. After recognizing the
emotional behaviors, agents decided to cooperate or
to avoid adverse behavior, not as artificial decisions
designed to simulate human behavior, but as the ra-
tional decisions that aimed at maximizing the overall
present and future payoffs. These decisions take into
account the personality of other agents, to help predict
their future behaviors in specific situations.
There are numerous ways to approach cooperation
and competitiveness (see, e.g., (Binmore, 1994; Bin-
more, 1998)). Our approach uses emotions to define
implicit contracts for predefined patterns of behavior
(e.g., “if you help me, i will also help you”, or “if
you attack me, i will also attack you”). Other patterns
of behavior could be used instead of these, but we
suggest following these particular patterns because
they occur in human beings and, therefore, a) this
approach may potentially inherit the already proven
benefits that such patterns convey to human social in-
teractions, and b) this approach may more accurately
simulate the behaviors of humans, which is important
for purposes such as achieving believability (e.g. in
the context of synthetic characters or video games),
achieving more accuraccy in social simulations, and
establishing more successful interactions with human
agents.
REFERENCES
Baecker, R. M., editor (1993). Readings in Groupware and
Computer-Supported Cooperative Work: Software to
Facilitate Human-Human Collaboration. Morgan
Kaufmann Publishers, San Mateo, CA.
Baron-Cohen, S. (1995). Mindblindness: An Essay on
Autism and Theory of Mind. MIT Press, Cambridge,
MA.
Binmore, K. (1994). Game Theory and the Social Contract
Volume 1: Playing Fair. MIT Press, Cambridge, MA.
Binmore, K. (1998). Game Theory and the Social Contract
Volume 2: Just Playing. MIT Press, Cambridge, MA.
Dam´asio, A. R. (1994). Descartes’ Error: Emotion, Reason
and the Human Brain. Grosset/Putnam Press, New
York, N.Y.
Frijda, N. H., Manstead, A. S. R., and Bem, S., editors
(2000). Emotions and Beliefs - How Feelings Influ-
ence Thoughts. Cambridge University Press, Cam-
bridge, UK.
Gilbert, N. and Conte, R., editors (1995). Artificial Soci-
eties: The Computer Simulation of Social Life. UCL
Press, London.
Gilbert, N. and Doran, J., editors (1994). Simulating Soci-
eties: The Computer Simulation of Social Life. UCL
Press, London.
Jennings, N. R. and Wooldridge, M., editors (1998). Agent
Technology: Foundations, Applications, and Markets.
Springer-Verlag, Berlin, Germany.
Kephart, J. O. and Greenwald, A. R. (2002). Shopbot eco-
nomics. Autonomous Agents and Multi-Agent Sys-
tems, 5(3):255–287.
Moss, S. and Davidson, P., editors (2001). Multi-Agent-
Based Simulation, volume 1979 of LNAI. Springer
Verlag, Berlin, Germany.
Ortony, A., Clore, G. L., and Collins, A. (1988). The Cog-
nitive Structure of Emotions. Cambridge University
Press, New York, N.Y.
Picard, R. (1997). Affective Computing. MIT Press, Cam-
bridge, MA.
Straffin, P. D. (1980). The prisoner’s dilemma. UMAP Jour-
nal, 1:101–103. Reprinted in: Rasmusen, E., editor
(2001). Readings In Games and Information. Wiley-
Blackwell, Oxford, UK.
Tennenholtz, M. (2004). Program equilibrium. Games and
Economic Behavior, 49(2):363–373.
Tucker, A. W. (1950). A two-person dilemma. Unpublished
notes, Stanford University. Reprinted in: Rasmusen,
E., editor (2001). Readings In Games and Informa-
tion. Wiley-Blackwell, Oxford, UK.
GratefulAgentsandAgentsthatHoldaGrudge-TheRoleofAffectiveBehaviorsinSustainedMulti-agentInteractions
329
