
Early Energy Estimation in the Design Process
of Networked Embedded Systems
Patrick Heinrich and Christian Prehofer
Fraunhofer Institute for Communication Systems ESK, Hansastr. 32, 80686 Munich, Germany
Keywords: Embedded Systems, Energy-efficiency, Network-wide Optimization, Adaptive Systems, Automotive.
Abstract: This paper focuses on estimating energy consumption in networked, embedded systems during the early
stages of design. In such systems with long development cycles, early decisions regarding hardware and
software have a major impact on energy consumption, which places constraints on the design during later
stages of the development process. The main objective of this paper is to model the energy consumption
throughout the entire design process and to provide a structure for more detailed models and validation. This
requires determining which design decisions and system parameters are available in each of the develop-
ment phases. Using this approach as a basis, energy consumption models are created for each phase. By re-
lying on different estimation techniques, energy consumption estimates are formulated based on the infor-
mation that is available at every development phase. The main goal is to illustrate a design flow that pro-
duces increasingly accurate estimates in each phase.
1 INTRODUCTION
This paper focuses on estimating energy consump-
tion in networked, embedded systems during the
early stages of design. As embedded systems be-
come more prevalent and powerful, they are con-
suming more energy. Our research concentrated on
the area of networked, embedded systems commonly
found in automobiles, aircraft and industrial sys-
tems. In today's luxury-class vehicles for instance,
the electrical and electronic components draw up to
2.5 kW (Little, www.adlittle.com); (Monetti and
Ulshöfer, 2011). Compared to what the engine re-
quires, 2 kW seems small. However, the electrical
components consume energy during every mode of
operation, even when in standby mode. Electrical
engines consume most of their energy during accel-
eration and even here the maximum power is seldom
demanded. An increase of 100 W thus means that
fuel consumption rises by 0.1 liter per 100 km, lead-
ing to an increase in CO
2
emissions of 2.5 g per
km (Monetti and Ulshöfer, 2011). This illustrates the
considerable potential for energy savings, an aspect
that must be factored in during the development
process.
Embedded systems designers, such as those ac-
tive in the automotive industry, are frequently given
energy consumption requirements for the finished
product. This makes it necessary to estimate the
energy consumption early in the design process.
This also makes it possible to evaluate different
designs with respect to energy consumption. Be-
cause the automotive industry has especially long
development cycles, hardware and software choices
must be made very early during the design pro-
cess (Weber, 2009). Optimizing energy consumption
early in the design process can therefore be a major
challenge. Networked systems feature a wide range
of technologies and topologies that significantly
impact energy consumption down the road. For
instance, the placement of functionality within an
ECU impacts partial networking modes, which in-
volves deactivating certain system components that
are not being used. This can reduce energy by as
much as 30 percent (Monetti and Ulshöfer, 2011).
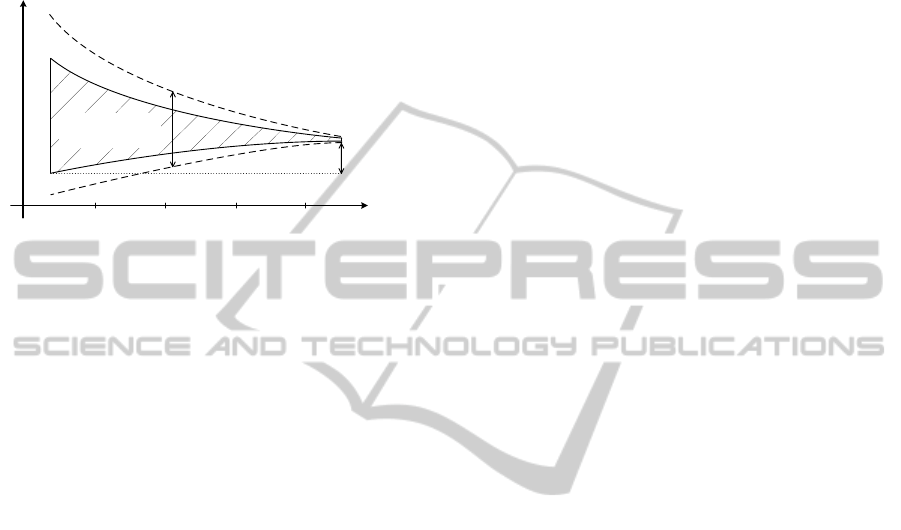
Figure 1, which depicts the various phases of a
typical system development process, reveals that the
energy savings potential gradually decreases over
the course of development. Energy savings estimates
are also imprecise, as shown by the dotted line.
In the early phase, the developer designs the
electronic control unit (ECU) system based only on
the features outlined in the specification. Design
choices such as software components or network
technologies impact the energy consumption. Modi-
fying these design choices at a later point in the
214
Heinrich P. and Prehofer C..
Early Energy Estimation in the Design Process of Networked Embedded Systems.
DOI: 10.5220/0004334502140220
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2013), pages 214-220
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
process is often difficult or too expensive to carry
out (Ross and Perry, 1999). In many design phases,
the designer has to evaluate different design varia-
tions to realize optimal energy consumption, but a
detailed analysis is not possible in these phases.
Figure 1: Energy Design Space during System Develop-
ment.
The main objective of this paper is to model the
energy consumption throughout the entire develop-
ment process. To do this, we have to determine
which design decisions and system parameters are
available in the various phases. Using this infor-
mation, we can then develop energy consumption
models for each phase. While using several different
estimations, the main goal is to show a design flow
that produces increasingly accurate estimates in each
phase.
A wealth of research has been conducted into de-
signing energy efficient systems comprised of indi-
vidual components. What has been lacking is corre-
sponding research considering the entire networked
embedded systems. With these systems, it is particu-
larly important to examine early on to what extent a
specific design impacts energy consumption.
Our work focuses on systems comprised of mul-
tiple ECUs connected via a communication network.
While this type of system can be found in various
environments, the impetus for our research stems
from the automotive industry. Vehicle systems fea-
ture many technologies with energy-saving designs,
such as the partial networking modes available in
AUTOSAR (www.autosar.org). The next step is to
determine how to use these technologies as efficient-
ly as possible. The aim of this paper is to illustrate
how system developers can easily and accurately
evaluate the impact of their design choices on ener-
gy consumption during the early stages of the design
process. The results can be used beyond automotive
embedded systems.
2 IMPACT OF ENERGY
CONSUMPTION
ON THE SYSTEM
DEVELOPMENT PROCESS
This section outlines the parameters for estimating
energy consumption when developing networked
embedded systems. These parameters are systemati-
cally analyzed with respect to accuracy and availa-
bility during the development process.
Developers have to make design choices in each
phase. These decisions are intertwined and define
the system in more detail as the development pro-
cess moves forward. For example, software design
begins by defining the required features, which are
then evolved into more detailed, intertwined indi-
vidual tasks. This is followed by the definition of the
internal structure of the tasks. After implementation,
the detailed timing parameters are available.
The typical system development processes are
structured into distinct phases as described in the
waterfall model (Boehm, 1981) or V-Model XT (V-
Modell XT: Part 1, www.ftp.tu-clausthal.de). The
relevant phases which influence the energy con-
sumption and the available information to estimate
the energy consumption are discussed below.
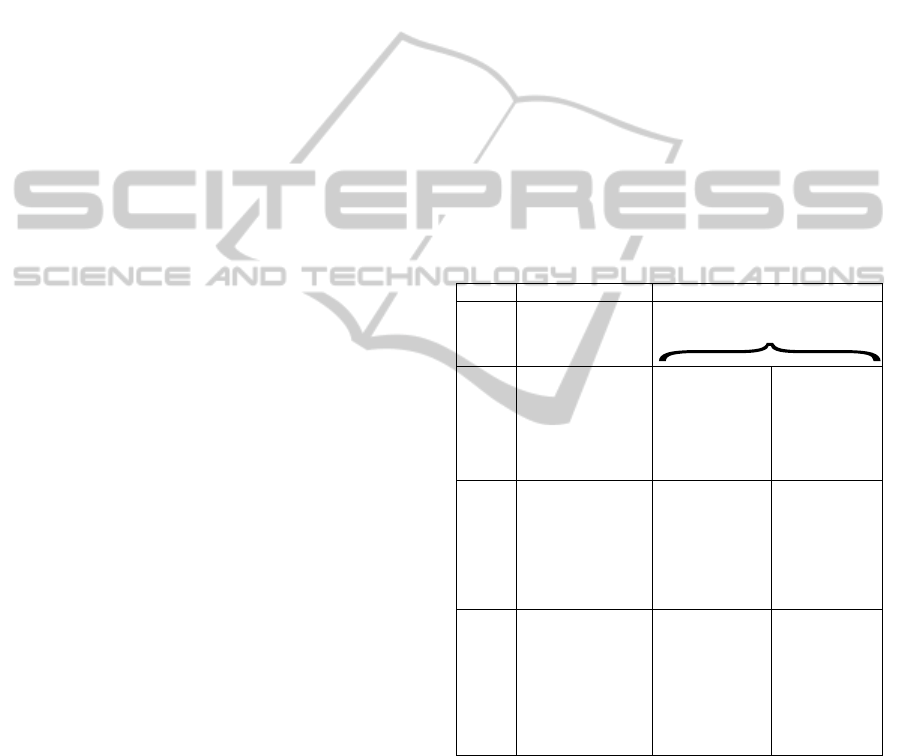
Table 1 summarizes the information available at
every design phase. The objective here is to illustrate
how accuracy increases from phase to phase or how
the available information is replaced by more accu-
rate data in the following phase. The parameters
presented here are used to estimate the energy con-
sumption in the next section. The values of the pa-
rameters are not only influenced by the design
choices (the task allocation), but how the choices are
implemented, such as the chosen hardware or oper-
ating system. While much research has been carried
out in the area of energy-saving technologies at the
component level, less attention has been paid to
understanding the potential for energy saving at the
network-wide level.
2.1 System Requirements
This phase defines the functional and non-functional
requirements of the entire system, such as the num-
ber of features or maximum energy consumption.
Afterwards, developers have a clear picture of the
required features, which allows them to estimate the
number of ECUs and how the features are allocated
to the individual ECUs. (In 2005, automobiles were
equipped on average with around 65 ECUs and 165
features (Little, www.adlittle.com)). Energy con-
system’s energy
consumption
time
System
Requirements
System
Architecture
System
Design
HW/SW
Development
System
Integration
Error Bandwidth of Energy
Consumption Estimation
Possible Energy
Consumption
Unused Energy
Saving Potential
EarlyEnergyEstimationintheDesignProcessofNetworkedEmbeddedSystems
215
sumption can be estimated by classifying each fea-
ture (navigation system, engine controls, electric
windows for instance) based on the required pro-
cessing power, necessary ECU size and what func-
tion the feature is intended to provide. The required
size and purpose of the ECUs are also factored in to
estimate the energy consumption. Large semicon-
ductor manufacturers such as Freescale Semiconduc-
tors already group their microcontrollers according
to the function or application. Freescale has six clas-
ses of automotive applications such as (Freescale’s
portfolio, www.freescale.com) advanced driver
assistance systems, chassis, safety and infotainment.
Each class of microcontroller features specific ener-
gy consumption parameters, which can be used to
define ECU energy classes.
2.2 System Architecture
In embedded systems, the features are implemented
in a distributed fashion to create specialized ECUs
that are installed in close proximity to the function
they serve. One feature consists of several tasks,
which are often allocated across different ECUs.
This phase defines the system architecture, including
hardware, number of ECUs, topology and software.
In other words, it defines how the tasks are allocated
across the ECUs and how they interact. Understand-
ing how the tasks interact also permits the developer
to estimate the required network bandwidth. While
the internal structure of the tasks is unknown, the
developer can estimate the processing power by
relying on various processing power classifications,
e.g. derived from existing tasks.
Industry benchmark tests are already available to
evaluate automotive microcontroller performance.
The Embedded Microprocessor Benchmark Consor-
tium (AutoBench 1.1, http://www.eembc.org) de-
fines 15 benchmark tests that include angle to time
conversion, bit manipulation, fast Fourier transform
and road speed calculation. The classifications can
be formed by grouping tasks that require similar
processing power, thus allowing a more detailed
estimate.
2.3 System Design
This phase specifies the elements of the previous
phase in more detail. With respect to the software,
this means the internal structure of the tasks, includ-
ing the algorithms and operating systems used. This
makes it possible to estimate the execution time of
the tasks, which is carried out using function point
analysis (Albrecht, 1979), cyclomatic complexity
(McCabe, 1976) or equivalent metrics. The actual
execution times are available after the software has
been implemented on specific hardware. After
choosing the processor and other hardware, the de-
veloper can then estimate the energy consumption of
the ECU.
2.4 Hardware/Software Development
This phase involves hardware and software imple-
mentation, which provides more detailed infor-
mation concerning task processing time, worst case
execution time (WCET) and hardware power con-
sumption. The beginning of this phase can be used
to simulate ECU execution and active/sleep times or
to measure the energy consumption using evaluation
boards, assuming they are nearly identical to the
installed hardware. A fairly accurate estimate of the
energy consumption is then possible at this point.
Table 1: Breaking down the information into more detail
during the development process.
Hardware Software
System
Require-
quire-
ments
≈ Number of ECUs
ECU Energy Class
Number of Features
Feature Computation Class
System
Archi-
tecture
Number of ECUs
ECU Energy Class
Topology
≈ Network Band-
width
Software
Architecture
(tasks as black
box):
- Dependencies
- Cycle Times
- Allocation
≈ Numb. of
Tasks
Task Computa-
tion Effort Class
System
Design
Number of ECUs
Topology
Network Bandwidth
≈ ECU- and
Network-specific
Energy Consump-
tion
Software
Architecture
(tasks as black
box):
- Dependencies
- Cycle Times
- Allocation
Numb. of Tasks
Task (internal)
Computation
Effort, e.g.
using function
point analysis
HW/SW
Devel-
opment
Number of ECUs
Topology
Network Bandwidth
ECU- and Network-
specific Energy
Consumption
ECU Active and
Sleep Times
Software
Architecture
(tasks as black
box):
- Dependencies
- Cycle Times
- Allocation
- Active and
Sleep Times
Numb. of Tasks
Task WCET
3 ESTIMATING ENERGY
DURING THE DEVELOPMENT
PROCESS
This section outlines equations for estimating energy
consumption in each of the development phases. The
equations rely on the information that is available in
each phase, building upon each other as the devel-
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
216

opment process progresses. Since information might
be missing or estimated in the various phases, each
equation features a specific degree of accuracy that
improves over time (see figure 1).
3.1 System Requirements
Equation 1 depicts an energy estimates based on the
number of features and ECUs. The number of fea-
tures n
feat
of one feature class is multiplied by the
individual feature computation factor c
feat
. Multiply-
ing by the required energy consumption per ECU,
which is represented by the ECU energy classes
E
HWclass
, then provides the estimated energy con-
sumption per ECU.
,,
∙
,
∙
,
(1)
E
1
represents the energy estimate of the entire sys-
tem within the system requirements phase. The ac-
curacy of this equation is based on the number and
accuracy of the feature computation and hardware
energy classes.
3.2 System Architecture
Equation 2 depicts an energy consumption estimate
using the software and hardware architecture infor-
mation. This means the number of tasks of one class
n
task
is multiplied by the task computation class fac-
tor c
task
. E
HWclass
represents the ECU energy classes
as mentioned above, but is more accurate since the
exact number of ECUs is known. At the system
architecture level, the energy consumption of com-
munication E
com
can be estimated since the hardware
architecture and the allocation of tasks are known
factors. (Note: While equation 1 and 2 appear to be
very similar, it is important to note that one feature
consists of multiple tasks. The sum of the tasks is
therefore much more detailed. This is also caused by
more task classes than feature classes.)
,,
∙
,
∙
,
(2)
E
2
represents the energy estimate of the entire sys-
tem within the system architecture phase. The accu-
racy of this equation is based primarily on the num-
ber and degree of accuracy of the task computation
and hardware energy classes.
3.3 System Design
Equation 3 shows the energy estimate using the
early-stage information regarding hardware power
consumption and task internal software structure.
The equation uses metrics to estimate the evaluation
times of the tasks as mentioned in section 2.3. Fac-
tor n
metric
represents the number of metric-specific
elements within a task, e.g. the number of function
points. The number of metric-specific elements
multiplied by the metric-element-specific computa-
tion time results in an estimation of task execution
time. The estimated computation time multiplied by
the ECU-specific power consumption P
HW
per ECU
results in the energy consumption per ECU. The
energy required for communication is then added to
the aggregate ECU energy consumption. This energy
model results in more accurate energy estimates than
using the above equations.
,,
∙
,
∙
,
(3)
E
3
represents the energy estimate of the entire sys-
tem within the system design phase. The accuracy of
this equation is based primarily on the accuracy of
the task execution time estimation metric and the
hardware power consumption estimate.
3.4 Hardware/Software Development
Equations 4-7 depict a model for estimating the
energy consumption of a system configuration as
outlined in (Heinrich and Prehofer, 2012). The ener-
gy consumption for a specific configuration is mod-
eled by adding together the energy consumed during
task executions (E
task
), sleep periods (E
sleeps
) includ-
ing the associated mode changes n
s
and communica-
tions (E
com
). Energy consumption is calculated using
a common multiplier t
mult
of all task periods, which
also determines the number of sleep states n
s
.
Apart from the ECU power consumption P
HW
at
a specific CPU frequency f
CPU
, the equation also
factors in the energy required to communicate via a
network E
c
per bit (including network overhead), as
well as the energy consumed by components during
sleep states.
The tasks and the communication between the
tasks have specific parameters. The assumption is
that the task execution time at a specific frequency
can be converted to the task execution time t
e
at
another frequency f
te
. The cycle time is specified by
t
c
and the necessary communication per cycle be-
EarlyEnergyEstimationintheDesignProcessofNetworkedEmbeddedSystems
217

tween tasks by c
t
. The sum of the single task execu-
tion times yields the task active time t
tasks
per ECU.
,
,
.
(4)
With
∙
,
∙
,
,
∙
(5)
and
∙
∙
∙
(6)
and
,
∙
,
(7)
The accuracy of these equations depends on the
accuracy of the individual parameters. Some param-
eters are still difficult to specify after system integra-
tion because of cross-influences or because the pa-
rameters are difficult to measure. A good example is
the energy required to execute one task on a com-
plex ECU with many parallel tasks scheduled by an
operating system.
4 RELATED RESEARCH
The method described in (Donnelly et al., 2006)
includes energy estimates during the development
process. The concept relies on a holistic approach to
developing energy-efficient products by using
checklists to ensure that specific energy aspects are
factored in. Our approach differs in that it focuses
specifically on the impact of energy consumption in
networked embedded systems. The paper referenced
in (Seo et al., 2009) discusses the early-stage estima-
tion of energy consumption for communication tasks
based on the architecture of the system. In this case
however, the assumption is that the energy demands
are the same for each device, which is not the case in
our system. The tool referenced in (Tensilica Inc,
http://www.tensilica.com) enables early-stage ener-
gy estimates for system-on-a-chip designs to opti-
mize processor and memory. This approach requires
software source code however. As part of our paper
"Network-Wide Energy Optimization for Adaptive
Embedded Systems" (Heinrich and Prehofer, 2012),
we previously presented models for estimating ener-
gy consumption at the network level. The publica-
tion "Energy Consumption Estimation in Embedded
Systems” (Konstantakos et al., 2008) furthermore
examines ECU-wide energy estimation. While both
of the latter two approaches are carried out during
the system design phase, they do not allow for esti-
mating energy consumption during the earlier devel-
opment phases.
Some of the research activity in this area focuses
on the hardware/software development or system
runtime phases. One approach to simplifying the
implementation of energy saving techniques during
hardware/software development is outlined in (Apel
et al., 2010). This relies on a modular approach in
which energy-saving functions can be selected and
implemented separately. The technique described in
(Shankaran et al., 2009) uses adaptive planning and
resource management to adapt the system to varying
workloads, but without focusing on energy efficien-
cy.
Most energy saving technologies optimize the
energy consumption of one component (i.e. CPU)
after the development phase (at runtime). Examples
include dynamic hardware resource management
and dynamic voltage/frequency scaling. Other meth-
ods focus on resource optimization, such as energy-
efficient task scheduling (Kang et al., 2002); (Hu
and R. Marculescu, 2004) or trade-offs such as re-
ducing quality of service to lower energy consump-
tion (Rusu et al., 2003); (Baker, 2011). A lot of
research concentrates on the reduction of system-
wide energy consumption, which in this paper
equates to component or ECU-wide. Another meth-
od outlined in (Benini et al., 2000) uses dynamic
power management (DPM), which deactivates idle
system components to save energy. The approach
described in (Jejurikar and Gupta, 2004)uses dynam-
ic voltage scaling and DPM to reduce energy con-
sumption across all components. It also factors in the
energy consumption of peripherals, such as memory,
in standby and processor activation/deactivation
periods. The software framework described in (Zeng
et al., 2008)uses various energy-saving techniques
and looks for corresponding trade-offs. While the
objective is to reduce component-wide energy con-
sumption for different applications during runtime,
this approach neglects the energy required for recon-
figuration.
None of these approaches use the possibilities of
optimizing energy consumption at the network level.
The approach discussed in (Heinrich and Prehofer,
2012) looks at the potential for network-wide energy
optimization by analyzing an embedded system via a
case-study. Network-wide optimization within wire-
less sensor networks has also been evaluated, but
with a focus on energy-efficient message routing.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
218

5 CONCLUSIONS
This paper outlines a phase-by-phase process for
estimating energy consumption in networked em-
bedded systems for typical development processes.
The goal is to integrate energy estimation in the
design process and to give developers the possibili-
ties to evaluate how design variants impact energy
consumption. To make this possible, energy estima-
tion must be enabled in the early phases of design
since every decision further limits the ability to
make design changes during later phases.
In this paper we created formalized energy con-
sumption estimates using various existing techniques
and the information that is available at each stage of
the process. The models we developed for net-
worked embedded system designs, such as for auto-
motive systems, include the effort required for each
task, sleep states and network communication.
Our research focused on the development of a se-
ries of models that factor in the information acquired
during each development phase and refine the model
of the prior phase. To date, other research work has
not considered a systematic analysis and examina-
tion of energy consumption during each develop-
ment phase. Future research will include validation
of the models using measurements during system
design.
REFERENCES
Arthur D. Little, Market and Technology Study Automo-
tive Power Electronics 2015. Available:
http://www.adlittle.com/downloads/tx_adlreports/AD
L_Study_Power_Electronics_2015.pdf.
A. Monetti, T. Otter, and N. Ulshöfer, “Spritverbrauch
senken, Reichweite erhöhen: System-Basis-Chip für
den Teilnetzbetrieb am CAN-Bus,” Elektronik
Automotive, no. 11, pp. 24–27, 2011.
J. Weber, Automotive Development Processes: Processes
for Successful Customer Oriented Vehicle
Development. Berlin, Heidelberg: Springer-Verlag
Berlin Heidelberg, 2009.
J. E. Ross and S. Perry, Total quality management: Text,
cases and readings, 3rd ed. Boca Raton, Fla: St. Lucie
Press, 1999.
AUTOSAR, Automotive Open System Architecture -
Homepage. Available: www.autosar.org.
B. W. Boehm, Software engineering economics.
Englewood Cliffs, NJ: Prentice-Hall, 1981.
V-Modell XT: Part 1: Fundamentals of the V-Modell.
Available: http://ftp.tu-clausthal.de/pub/institute/
informatik/v-modell-xt/Releases/1.3/V-Modell XT
HTML English (2012, Aug. 06).
Freescale’s portfolio of automotive microcontrollers.
Available: www.freescale.com/webapp/sps/site/
homepage.jsp?
code=IFATOATMTV
The Embedded Microprocessor Benchmark Consortium,
AutoBench 1.1: Software Benchmark Data Book.
Available: http://www.eembc.org/techlit/datasheets/
autobench_db.pdf.
A. J. Albrecht, “Measuring Application Development
Productivity,” Proceedings of the Joint SHARE,
GUIDE, and IBM Application Development
Symposium, Monterey, California, October 14–17,
IBM Corporation (1979), pp. 83–92.
T. McCabe, “A Complexity Measure,” IIEEE Trans.
Software Eng, vol. 2, no. 4, pp. 308–320, 1976.
P. Heinrich and C. Prehofer, “Network-Wide Energy
Optimization for Adaptive Embedded Systems,” in
Proceedings of the 4th Workshop on Adaptive and
Reconfigurable Embedded Systems (APRES 2012),
2012, pp. 24–27.
K. Donnelly, Z. Beckett-Furnell, S. Traeger, T.
Okrasinski, and S. Holman, “Eco-design implemented
through a product-based environmental management
system,” Journal of Cleaner Production, vol. 14, no.
15-16, pp. 1357–1367, 2006.
C. Seo, G. Edwards, D. Popescu, S. Malek, and N.
Medvidovic, “A framework for estimating the energy
consumption induced by a distributed system's
architectural style,” in Proceedings of the 8th
international workshop on Specification and
verification of component-based systems - SAVCBS
'09: ACM Press, 2009, p. 27.
Tensilica, Inc, Optimizing for Energy Using the Xenergy
Energy Estimator Tool: Application Note. Available:
http://www.tensilica.com/uploads/pdf/XenergyEstimat
ion.pdf.
V. Konstantakos, A. Chatzigeorgiou, S. Nikolaidis, and T.
Laopoulos, “Energy Consumption Estimation in
Embedded Systems,” IEEE Trans. Instrum. Meas,
vol.
57, no. 4, pp. 797–804, 2008.
S. Apel, D. Batory, K. Czarnecki, F. Heidenreich, C.
Kästner, O. Nierstrasz, N. Siegmund, and M.
Rosenmüller, “Automating energy optimization with
features,” in Proceedings of the 2nd International
Workshop on Feature-Oriented Software Development
- FOSD '10: ACM Press, 2010, pp. 2–9.
N. Shankaran, J. S. Kinnebrew, X. D. Koutsoukas, C. Lu,
D. C. Schmidt, and G. Biswas, “An Integrated
Planning and Adaptive Resource Management
Architecture for Distributed Real-Time Embedded
Systems,” IEEE Trans. Comput, vol. 58, no. 11, pp.
1485–1499, 2009.
Dong-In Kang, S. Crago, and Jinwoo Suh, “A fast
resource synthesis technique for energy-efficient real-
time systems,” in Proceedings of the 23rd IEEE Real-
Time Systems Symposium RTSS 2002, IEEE, Ed, 2002.
Jingcao Hu and R. Marculescu, “Energy-aware
communication and task scheduling for network-on-
chip architectures under real-time constraints,” in
EarlyEnergyEstimationintheDesignProcessofNetworkedEmbeddedSystems
219

Proceedings of the Design, Automation and Test in
Europe Conference and Exhibition (DATE’04), IEEE,
Ed, 2004, pp. 234–239.
C. A. Rusu, R. Melhem, and D. Mosse, “Maximizing the
system value while satisfying time and energy
constraints,” IBM J. Res. & Dev, vol. 47, no. 5, pp.
689–702, 2003.
M. Baker, Topics in power and performance optimization
of embedded systems, Dissertation, Arizona State
University, 2011, Available: http://hdl.handle.net/
2286/jq8f23vj0yh
L. Benini, A. Bogliolo, and G. de Micheli, “A survey of
design techniques for system-level dynamic power
management,” in Transactions on Very Large Scale
Integration (VLSI) Systems, IEEE, Ed, 2000.
R. Jejurikar and R. Gupta, “Dynamic voltage scaling for
systemwide energy minimization in real-time
embedded systems,” in Proceedings of the
International Symposium on Low Power Electronics
and Design (ISLPED’04), 2004, p. 78.
G. Zeng, H. Tomiyama, H. Takada, and T. Ishihara, “A
Generalized Framework for System-Wide Energy
Savings in Hard Real-Time Embedded Systems,” in
Proceedings of the 5th International Conference on
Embedded and Ubiquitous Computing EUC 2008,
2008, pp. 206–213
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
220
