
Image Labeling using Integration of Local and Global Features
Takuto Omiya and Kazuhiro Hotta
Meijo University, 1-501 Shiogamaguchi, Tenpaku-ku, Nagoya 468-8502, Japan
Keywords: Image Labeling, Integration of Local and Global Features, Bag-of-Words, RootSIFT.
Abstract: In this paper, we carry out image labeling based on probabilistic integration of local and global features.
Many conventional methods put label to each pixel or region using the features extracted from local regions
and local contextual relationships between neighboring regions. However, labeling results tend to depend on
a local viewpoint. To overcome this problem, we propose the image labeling method using not only local
features but also global features. We compute posterior probability of local and global features
independently, and they are integrated by the product. To compute probability of global region (entire
image), Bag-of-Words is used. On the other hand, local co-occurrence between color and texture features is
used to compute local probability. In the experiments using MSRC21 dataset, labeling accuracy is much
improved by using global viewpoint.
1 INTRODUCTION
Image labeling is one of the most challenging and
important problems in computer vision. The goal is
to assign label in pre-defined set of classes e.g. sky,
car, road, etc. to every pixel in the image. Image
labeling is one of the most crucial steps toward
image understanding and has a variety of
applications such as image retrieval and image
classification. The most fundamental approach for
image labeling put labels to each region (pixel,
image patches) using the local features (color,
texture, etc.) extracted from each region (Barnard
and Forsyth, 2001). However, this approach has
some problems in which labels in an object tend to
be inconsistent, because this approach puts labels to
each region independently and the results tend to
depend on local viewpoint.
To overcome these problems, some approaches
have been proposed recently. Popular approaches
use information not only local features but also local
contextual relationships between regions. In those
methods, Conditional Random Field (CRF) (Lafferty
et al., 2001) model is used. Shotton et al. (2006)
used a CRF model to jointly model the appearance,
shape and context information of different semantic
categories. Gould et al. (2008) used a CRF-based
model to integrate the relative location prior of
different categories by using appearance-based
Figure 1: Global information helps to recognize the
regions which are difficult to recognize from only local
information.
image features. Tu (2008) proposed an approach for
learning a contextual model named auto-context
without CRF model. The common problem in these
approaches is that recognition results tend to get in a
local minimum. We consider that the reason of this
problem is lack of global viewpoint. Since only local
and local relationship information are used, it puts
mislabels to regions which are classified easily by
global viewpoint.
In this paper, we propose the image labelling
method which introduces the global viewpoint. The
effectiveness of global information is shown in
Figure 1. It is difficult to recognize images in top
row but we can recognize red square regions easily
by using entire image. This shows that global
information much helps to recognize the regions
which are difficult to recognize from only local
613
Omiya T. and Hotta K. (2013).
Image Labeling using Integration of Local and Global Features.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 613-618
DOI: 10.5220/0004334606130618
Copyright
c
SciTePress

Figure 2: The framework of proposed method.
information. In the proposed method, we estimate
class label of each local region in the image, and
class label of entire image. Then we integrate the
probability for each class label obtained from local
and global viewpoints. In local region, we compute
the posterior probability of each class label by
Support Vector Machine (SVM) (Vapnik, 1995) of
local features. We use the local co-occurrence
feature between texture and color. In global region,
we use Bag-of-Words (BoW) (Csurka et al., 2004)
model which is a widely used for image recognition
(Nowak et al., 2006). We also use SVM and
compute posterior probability of entire image. By
taking the product of posterior probability of local
and global features, information of local and global
are integrated. After that, in order to improve the
accuracy, we carry out label consistency process.
Concretely, we take the product of the probability
between certain region and neighboring regions, and
we put the class label with to the region the highest
probability.
In the conventional method using the global
viewpoint, Galleguillos et al. (2008) used BoW as
global features and incorporate into CRF model. The
difference from the proposed method is to perform
image segmentation before integration of local and
global, In addition, by using co-occurrences and
relative location of image regions after integration of
local and global labels reused. Ladicky et al. (2010)
used object class co-occurrence in an image as
global viewpoint, and incorporate it into CRF model.
It is different from our approach integrating local
and global information by product of probabilities.
Experiments are carried out using the MSRC21
dataset (Shotton et al., 2006) with 21 object classes.
We confirmed that the accuracy is improved by
introducing the global viewpoint. Class average
accuracy was 72.5% and pixel-wise accuracy was
76.2%. This is much higher than the accuracy using
only local features in which class average accuracy
was 48.6% and pixel-wise accuracy was 63.0%.
The remainder of the paper is organized as
follows. In section 2, we describe the details of the
proposed approach. Section 3 shows experimental
results for MSRC21 dataset. Conclude and future
works are described in section 4.
2 PROPOSED METHOD
In this section, we describe the proposed method
which integrates local and global features. The
framework of the proposed method is shown in
Figure 2. Our method consists of the extraction of
local and global features, computation of the
posterior probability of the local and global region,
integration of local and global information and label
consistency in the neighboring region.
We describe each stage in the following sections.
2.1 Extraction of Local Features
We estimate the class label of each local region
based on color and texture features. Color features
are effective to identify object classes which have
characteristic in color (e.g. sky, grass, etc.). On the
other hand, color features are sensitive to changes in
brightness. In addition, in some object classes, color
variation is large such as red cars and white cars, and
color features are not effective. Therefore, we also
use local texture features. Texture features are robust
to changes in brightness and are not affected by
color variation. In this paper, we exploit more robust
local feature. That is the local co-occurrence of color
and texture features, and is defined by using color
and texture histograms.
We use HSV color space to make color
histogram because RGB value is sensitive to
changes in brightness. In order to create HSV
histogram, we quantize HSV color space by discrete
intervals; 18 discrete values for hue and 3 values for
saturation and value (brightness) which is used in
(Smith and Chang, 1996). As a result, HSV
histogram becomes 162 (1833) dimensions. Hue
is quantized finer than other elements because hue is
the most important element to express color.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
614

We use Local Binary Pattern (LBP) (Ojala, 2002) as
texture histogram. LBP is also robust to changes in
brightness. Since LBP is extracted from grayscale
images, it is robust to color changes. LBP is defined
as an ordered set of binary comparisons of pixel
intensities between the center pixel and its 8
surrounding pixels. The decimal form of LBP code
is expressed as
LBP
,
2
,
(1)
where
corresponds to intensity value of the center
pixel at position (
,
),
to the intensity values of
the 8 surrounding pixels, and function is
defined as
s
1, 0
0, 0.
(2)
Each bin in LBP histogram corresponds to the LBP
code, and the dimension of LBP histogram is 256.
We describe how to define the local co-
occurrence feature. The feature is represented by
HSV histogram (162 bins) and LBP histogram (256
bins). Figure 3 shows how to compute the local co-
occurrence feature. We extract the values of HSV
and LBP at each pixel and vote one to corresponding
bin in two dimensional spaces. Thus, this feature can
represent local co-occurrence of color and texture
features. Final dimension of this feature is 41,472
(256162).
Here we define local region to make the local co-
occurrence histogram. Since the class label is assign
to each local region, the size of a local region should
not be large. In this paper, the size of a local region
is set to 5 5 pixels. However, if we make co-
occurrence histogram in 55 pixels, it becomes too
sparse. Thus, local co-occurrence histogram is made
from surrounding 1515 pixels of the center local
region with 55 pixels.
Figure 3: The local co-occurrence histogram of HSV and
LBP features.
2.2 Extraction of Global Features
In this section, we describe the global features
extracted from the entire image. We use Bag-of-
Words (BoW) as global features. SIFT features are
extracted from the entire image, and they are divided
into several clusters by K-means. The cluster center
vectors are used as visual words. The entire image is
described by the histogram of frequency of visual
words.
We use RootSIFT (Arandjelovic and Zisserman,
2012) instead of standard SIFT (Lowe, 1999)
because RootSIFT outperformed standard SIFT.
RootSIFT is obtained by the simple transformation
of SIFT, and it is an element wise square root of the
L1 normalized SIFT vectors.
We extract RootSIFT by grid sampling whose
effectiveness is reported in image recognition (Fei-
Fei and Perona, 2005). RootSIFT is extracted at the
interval of 8 pixels with several scales (8, 12, 16 and
20 pixels). In experiments, the number of visual
words is set to 1000 empirically.
2.3 Computation of Posterior
Probability
We compute the posterior probability of local and
global features. Since image labeling is the multi-
class classification problem, we use one-against-one
SVM. In this paper, both of local and global features
are represented by histograms. Therefore, we use χ
kernel and histogram intersection kernel whose
effectiveness was been reported (Zhang et al., 2007);
(Chapelle et al., 1999). In global features, we use χ
kernel is defined as
,exp-
γ
,
(3)
where γ is the hyper-parameter which is determined
on the basis of cross-validation. χ
kernel gives high
accuracy but its computational cost is high and
parameter dependence is high.
In local features, the number of dimensions is
high and the number of local features is large.
Therefore, we use histogram intersection kernel
whose computational cost is lower than χ
kernel. In
addition, the accuracy is comparable to χ
kernel.
Histogram intersection kernel is defined as
,min
,
.
(4)
We compute the posterior probability of local
and global regions independently. To compute the
posterior probability, LibSVM (Chang and Lin,
2001) is used. The probability of global region is
represented as
P
|
,
(5)
ImageLabelingusingIntegrationofLocalandGlobalFeatures
615

where
corresponds to the th object class and
is global feature vector.
The probability of local region in an image is
represented as
P
|
,
(6)
where corresponds to the th local region in an
image.
is local feature vector of the local
region .
2.4 Integration of Local and Global
Information
After computing posterior probabilities of local and
global features, we integrate them the product of the
probability as
.
(7)
expresses the probability of the th
class for local region in an image.
2.5 Label Consistency
There is correlation between each region and its
neighboring regions. Thus, we use label consistency
to improve accuracy after integrating of local and
global information. The region for label
consistency is defined by certain local region and its
8 neighboring local regions. Label consistency is
obtained by the product of
between the
center and its 8 neighboring regions. The label in
the local region is defined as
argmax
∈
.
(8)
This process helps to put labels more smoothness.
3 EXPERIMENTS
This section shows the experimental results. First,
the image dataset used in experiment and evaluation
method are explained in section 3.1. Next,
evaluation results are shown in section 3.2.
3.1 Image Dataset and Evaluation
Method
We evaluate the proposed method using the
MSRC21 dataset (Shotton et al., 2006). This dataset
consists of 591 color images whose size is
approximately 320213 pixels. The ground truth
(correct labeling) with 21 object classes are given.
The dataset is already divided into training and test
set (276 training and 256 test images), and we also
use them.
Image labeling performance is evaluated by two
accuracies in conventional methods (Shotton et al.,
2006). The first one is class average accuracy which
is the average of accuracy of each class. The second
one is the pixel-wise accuracy which is the accuracy
rate in terms of all pixels. We also evaluated our
method by two measures.
3.2 Evaluation Results
First, we evaluate all different steps in the proposed
method as shown in the top 3 rows of Table 1. When
only local features are used in object classes which
are small change in appearance such as sky and
grass, high accuracy is obtained. On the other hand,
accuracies of object classes with large change in
appearance are low.
However, by introducing global features, the
accuracies of all classes except for building and tree
are much improved. Class average accuracy is
improved 15.6% and pixel-wise accuracy is
improved 8.5%. In particular, accuracies of object
classes with large change in appearance such as
chair, boat and sign are greatly improved by
integration global information. The result
demonstrates the effectiveness global viewpoint.
After that, we add label consistency process to
our method. The process improves the accuracy of
most classes except for grass, road and sky. Class
average accuracy is improved 8.2% and pixel-wise
accuracy is improved 4.7%. These results
demonstrate that each step of our method is effective.
Next we compare the results to conventional
methods (Tu, 2008); (Galleguillos et al., 2008);
(Ladicky et al., 2010) as shown in the bottom 3 rows
of Table 1. Our method is getting close to auto-
context model (Tu, 2008). Pixel-wise accuracy is
worse slightly but class average accuracy of our
method is better than auto-context. Tu (2008)
introduced the auto-context model to use contextual
information. While they did not use the global
viewpoint. In particular, accuracies of object classes
(flower, bird and boat) of the proposed method are
higher than auto-context model. By using global
features and label consistency, our method improved
the accuracy of the object classes with large changes
in the appearance.
Galleguillos et al. (2008) used global viewpoint
in CRF. In addition, object co-occurrence and spatial
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
616
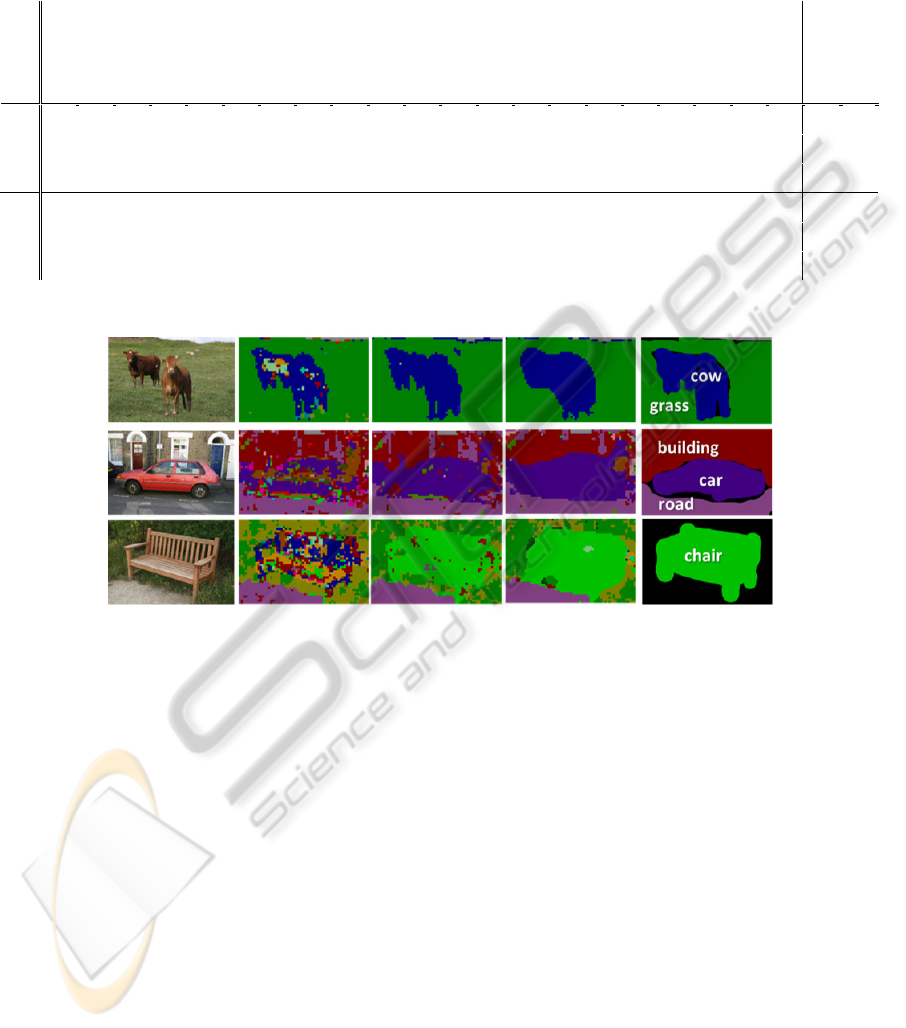
Table 1: Results on the MSRC21 dataset. For each class, the pixel-wise accuracy is provided. Average represents class
average accuracy. Pixel-wise represents pixel-wise accuracy. The top three rows show different steps of proposed method.
(a) shows results when only local features. (b) shows results when integration local and global features. (c) shows when
integration local and global features and label consistency. The bottom three rows show results of conventional methods.
(d) shows results of Tu (2008). (e) shows results of Galleguillos et al. (2008). (f) shows results of Ladicky et al. (2010).
building
grass
tree
cow
Sheep
sky
aeroplane
water
face
car
bicycle
flower
sign
bird
book
chair
road
cat
dog
body
boat
Average
Pixel-wise
(a) 52 92 71 50 53 90 56 56 58 43 65 46 18 13 61 12 70 45 26 31 11 48.6 63.0
(b) 45 94 70 74 75 91 77 63 75 65 89 63 49 34 72 45 79 64 50 40 37 64.3 71.5
(c) 55 92 74 87 85 89 88 63 80 78 92 76 65 47 78 62 77 70 65 52 47 72.5 76.2
(d) 69 96 87 78 80 95 83 67 84 70 79 47 61 30 80 45 78 68 52 67 27 68.7 77.7
(e) 91 95 80 41 55 97 73 95 81 57 60 65 54 52 56 42 96 42 46 77 81 68.4 n/a
(f) 82 95 88 73 88 100 83 92 88 87 88 96 96 27 85 37 93 49 80 65 20 76.8 87
Figure 4: Example results on the MSRC21 dataset. (a) Original images, (b) Results of local features, (c) Results of local +
global features, (d) Results of local + global features + Label consistency, (e) Ground truth.
context (above, below, inside and around) are also
introduced. Our method outperformed the method in
class average accuracy. More that pixel-wise
accuracy of the method is not published. Since
Galleguillos et al. introduced the spatial context, the
accuracies of object classes with strong
characteristic spatially such as sky, road and water
are higher than our method.
Ladicky et al. (2010) incorporated object co-
occurrence statistics as global viewpoint into CRF.
Object co-occurrence statistics provide which
classes appear in the same image together. The
accuracy of this method is high. However, in chair,
boat, cat and bird classes, our method is much higher
than it. To recognize the object classes with large
change in the appearance, global viewpoint of our
method is more superior.
Qualitative results of the proposed method are
shown in Figure 4. When only local features are
used, class labels are scattered. The label of each
region has been identified independently, labeling
results fall into a local minimum. By introducing
global features, the dispersion of the label is
improved. In addition, global features provide
improvement to recognize object classes which can
not be recognized by only local features. In addition,
label consistency process provides the more
consistent labeling results. These results show the
effectiveness of our method.
4 CONCLUSIONS
In this paper, we proposed image labeling method
that integrates the labels obtained from local and
global viewpoints. We demonstrated the
effectiveness of using global viewpoint by
experiments. Only local viewpoint can not recognize
(b) (c) (d) (e)
(
a
)
ImageLabelingusingIntegrationofLocalandGlobalFeatures
617

objects with complex structure, and labeling results
fall into a local minimum. Experimental results
show that global viewpoint overcome these
problems. In addition, label consistency process
provides more smooth labeling results.
The main problem of the proposed method is that
global feature can not handle multiple classes and
represent the position of the objects. This is because
Bag-of-Words method classifies only one object in
an image. For example, when the global features are
extracted from the image contained car and building,
we obtain probability of each class not both classes.
Current global feature can not recognize building
and car simultaneously, and position of each object
is not obtained. We want to introduce the new global
feature which can recognize multiple classes and
position of the objects. That is a subject for future
works.
ACKNOWLEDGEMENTS
This work was supported by KAKENHI No.
24700178.
REFERENCES
Arandjelovic, R. Zisserman, A. (2012). Three things
everyone should know to improve object retrieval.
Proc. Computer Vision and Pattern Recognition, pp.
2911-2918.
Barnard, K. and Forsyth, D. (2001). Learning the
semantics of words and pictures. Proc. International
Conference on Computer Vision. vol. 2, pp. 408-415.
Chang, C. and Lin, J. (2001). LIBSVM: a library for
support vector machines. http://www.csie.ntu.edu.tw/
~cjlin/libsvm
Chapelle, O., Haffner, P. and Vapnik, V. (1999). Support
vector machines for histogram-based image
classification. Neural Networks, vol. 10, pp. 1055-
1064.
Csurka, G., Dance, C., Fan, L., Willamowski, J. and Bray,
C. (2004). Visual categorization with bags of
keypoints. Proc. ECCV Workshop on Statistical
Learning in Computer Vision, pp. 59-74.
Fei-Fei, L. and Perona, P. (2005). A bayesian hierarchical
model for learning natural scene categories. Proc.
Computer Vision and Pattern Recognition, vol. 2, pp.
524-531.
Galleguillos, C., Rabinovich, A. and Belongie, S. (2008).
Object categorization using co-occurrence, location
and appearance. Proc. Computer Vision and Pattern
Recognition, pp. 1-8.
Gould, S., Rodgers, J., Cohen, D., Elidan, G. and Koller,
D. (2008). Multi-class segmentation with relative
location prior. International Journal of Computer
Vision, vol. 80, pp. 300-316.
Ladicky, L., Russell, C., Kohli, P. and Torr, P. (2010).
Graph cut based inference with co-occurrence
statistics. Proc. European Conference on Computer
Vision. pp. 239-253.
Lafferty, J., McCallum, A. and Pereira, F. (2001).
Conditional random fields: probabilistic models for
segmenting and labeling sequence data. Proc.
International Conference on Machine Learning, pp.
282-289.
Lowe, D. (1999). Object recognition from local scale-
ivariant features. Proc. International Conference on
Computer Vision, vol. 2, pp. 1150-1157.
Nowak, E., Jurie, F. and Triggs, B. (2006). Sampling
strategies for bag-of-features image classification.
Proc. European Conference on Computer Vision, pp.
490-503.
Ojala, T. (2002). Multiresolution gray-scale and rotation
invariant texture classification with local binary
patterns. Pattern Analysis and Machine Intelligence,
vol 24, pp. 971-987.
Shotton, J., Winn, J., Rother, C. and Criminisi, A. (2006).
Textonboost: joint appearance, shape and context
modelling for multi-class object recognition and
segmentation. Proc. European Conference on
Computer Vision, pp. 1-15.
Smith, J. and Chang, S. (1996). Tools and techniques for
color image retrieval. Symposium on Electronic
Imaging: Science and Technoloy-Strage and Retrieval
for Image and Video Database IV, pp. 426-437.
Tu, Zhuowen. (2008). Auto-context and its application to
high-level vision tasks.
Proc Computer Vision and
Pattern Recognition, pp. 1-8.
Vapnik, V. (1995). The nature of statistical learning
theory, Springer-verlag New York. New York.
Zhang, J., Marzaklek, M., Lazebnik, S. and Schmid, C.
(2007). Local features and kernels for classification of
texture and object categories: a comprehensive study.
International Journal of Computer Vision, vol. 73, pp.
213-238.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
618
