
Linear Programming Formulation of the Elevator Trip
Origin-destination Matrix Estimation Problem
Juha-Matti Kuusinen, Mirko Ruokokoski, Janne Sorsa and Marja-Liisa Siikonen
KONE Technology, KONE Corporation, POB 7, 02151 Espoo, Finland
Keywords:
Elevator traffic, Origin-destination Matrix, Linear Programming, Branch-and-bound.
Abstract:
Elevator group control dispatches elevators to passengers’ calls in a dynamic environment where new calls
constantly emerge. At the moment of making a dispatching decision, it is not known when and at which floors
new passengers will register new calls, what is the number of passengers waiting behind these and existing
calls, and what are their destinations. Robust dispatching decisions require that future passenger traffic is
forecast based on the realized passenger flow in a building. The problem is that this flow cannot be directly
measured. It can, however, be estimated by finding the passenger counts for the origins and destinations of
every elevator trip occurring in a building. An elevator trip consists of successive stops in one direction of
travel with passengers inside the elevator. We formulate the elevator trip origin-destination matrix estimation
problem as a minimum cost network flow problem. We also present a branch-and-bound algorithm for finding
all solutions to the problem and study its performance based on numerical experiments.
1 INTRODUCTION
Assume that when an elevator stops, the passengers
inside the elevator car first alight and then the possi-
bly waiting passengers board the elevator. Then, an
elevator trip to up or down direction starts at a stop
where passengers board an empty elevator and ends
to a stop where the elevator becomes empty again.
At each stop, the elevator group control registers the
number of boarding and alighting passengers, and the
calls given by the boarding passengers.
Our goal is to estimate elevator trip origin-
destination (OD) matrices, i.e., the passenger counts
for the OD pairs of the elevator trips. The elevator
trip OD matrices estimated for a given time interval
are combined to form a building OD matrix that de-
scribes the traffic flow in the whole building during
that interval. The building OD matrices form traffic
statistics that are used to forecast future traffic. The
required information is: what is the number of pas-
sengers waiting behind each existing and new call at
the time of serving the call, when and at which floors
new calls are likely to occur, and what are the desti-
nations of the passengers. These forecasts are needed
in elevator dispatching to make robust call allocation
decisions in constantly changing traffic conditions.
An elevator trip is analogous to a single transit
route such as a bus line where there is at most one
route connecting any OD pair, and usually counts of
boarding and alighting passengers are collected from
all stops on the route (Nguyen, 1984). The passenger
counts for the OD pairs of the route are typically esti-
mated by minimizing the distance to a reference OD
matrix with respect to a suitable distance metric while
also producing the observed boarding and alighting
counts. Popular OD matrix estimation methods are
iterative proportional fitting which is known also as
the bi-proportional or Bregman’s balancing method
(Lamond and Stewart, 1981; Bell, 1983; Nguyen,
1984; Ben-Akiva et al., 1985), maximum entropy and
minimum information (Zuylen and Willumsen, 1980;
Nguyen, 1984; Ben-Akiva et al., 1985), maximum
likelihood and generalized least squares (Ben-Akiva
et al., 1985; Cascetta and Nguyen, 1988), Bayesian
inference (Maher, 1983; Cascetta and Nguyen, 1988;
Li, 2009), recursive methods (Tsygalnitsky, 1977;
Furth and Navick, 1992; Li and Cassidy, 2007) and bi-
level programming formulations (Fisk, 1988; Lund-
gren and Peterson, 2008).
An elevator trip OD matrix could in principle be
estimated with these methods but some basic differ-
ences between an elevator trip and a single transit
route prevent their use. A single transit route is typ-
ically defined in advance and is not often changed.
Hence, usually a single OD matrix is estimated for
a certain time period using the corresponding refer-
150
Kuusinen J., Ruokokoski M., Sorsa J. and Siikonen M..
Linear Programming Formulation of the Elevator Trip Origin-destination Matrix Estimation Problem.
DOI: 10.5220/0004338502980303
In Proceedings of the 2nd International Conference on Operations Research and Enterprise Systems (ICORES-2013), pages 298-303
ISBN: 978-989-8565-40-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

ence OD matrix and boarding and alighting counts
observed during that period. An elevator trip is re-
quest driven, which means that each elevator trip has
its own set of OD pairs defined by the calls given by
the boarding passengers. Hence, we need to estimate
a separate OD matrix for each elevator trip. A natural
requirement is then that the estimated OD passenger
counts are integer-valued. The above methods do not
in general meet this condition. In addition, when el-
evators are installed in a new building, the reference
matrix is not available and the elevator trip OD ma-
trices have to estimated based only on the observed
boarding and alighting counts.
We model the elevator trip OD matrix estimation
problem as a minimum cost network flow problem.
This model can be used to solve the problem when the
measured boarding and alighting counts are consis-
tent taking into account also lower bounds on the OD
passenger counts. When the counts are consistent, the
result of minimizing the distance between the board-
ing and alighting counts produced by the estimated el-
evator trip OD matrix and the observed boarding and
alighting counts does not depend on the distance met-
ric. The minimum cost network flow formulation is
appealing since it is a linear program which can be
efficiently solved with the network simplex algorithm
(Bertsimas and Tsitsiklis, 1997). The elevator trip OD
matrix estimation problem is either over-, exactly- or
under-determined, i.e., the number of OD pairs is ei-
ther less than, equal to or greater than the number
of boarding and alighting counts. In the first case,
the problem has a unique solution and in the last two
cases it has more than one solution.
We present a simple branch-and-bound algorithm
to find all solutions to the problem. The algorithm is
motivated by the one-three algorithm (Danna et al.,
2007). We want to find all solutions and then select
one among them randomly because without any ad-
ditional information it is impossible to know which
of the solutions correspond to the true OD passen-
ger counts, i.e., to the realized passenger traffic. In
the long term, the random selection results to traf-
fic statistics, i.e., building OD matrices, that are not
affected by the algorithm used in solving the prob-
lem, and thus, model better the possible realizations
of the traffic. This is desirable when the statistics are
used to make passenger traffic forecasts for elevator
dispatching. An existing method to estimate an ele-
vator trip OD matrix from inconsistent boarding and
alighting passenger counts is based on solving a suc-
cession of positive inverse problems (Yoneda, 2007).
This method, however, cannot be used to find all so-
lutions.
In a real time elevator group control, there is usu-
ally only a very short time for solving the elevator trip
OD matrix estimation problem. Therefore, we study
the execution time of the branch-and-boundalgorithm
in finding all solutions to four typical example prob-
lems.
2 FORMULATION
We define an elevator trip as a directed network of
nodes N = {1,2,... ,m}, and arcs A. The nodes
correspond to the floors of a building. Let b
i
and
a
i
denote the measured number of passengers who
board and alight the elevator at node i, respectively.
Furthermore, let N
+
⊂ {1,2,...,m − 1} and N
−
⊂
{2,3,..., m} denote the set of pickup and delivery
nodes, respectively. Node i ∈ N
+
if b
i
≥ 1, and node
j ∈ N
−
, if a
j
≥ 1. The nodes i ∈ N
+
and j ∈ N
−
,
i + 1 ≤ j ≤ m, define the OD pair (i, j) if either the
passengers who board the elevator at node i register a
delivery request to node j, or there is another node k,
k ∈ {1,2,..., i− 1}, where a delivery request is regis-
tered to node j. Let A denote the set of arcs defined by
the OD pairs (i, j), i ∈ N
+
, j ∈ N
−
. Finally, define x
ij
as the unobservable number of passengers from the
origin node i to the destination node j, i.e., the OD
passenger count along the arc (i, j) ∈ A.
Figure 1 presents an elevator trip with five nodes
and OD pairs. This example corresponds to a situa-
tion where the passengers who board the elevator at
the first node register delivery requests to nodes 3 and
4, and the passengers who board the elevator at the
second node register a new delivery request to node 5.
In general, a boarding passenger cannot register a de-
livery request to a destination where a request already
exists but it is of course possible that the passenger
travels to this destination. Hence, even if the passen-
gers who board the elevator at the second node cannot
register delivery requests to nodes 3 and 4, it is possi-
ble that some of them travel to these destinations. In
the example, a dashed arc describes this situation, and
thus, arcs (2,3) and (2,4) are dashed. It can also be as-
sumed that passengers who board an elevator cannot
travel to destinations defined by delivery requests reg-
istered at later nodes. This is why there is no arc (1,5)
in the example.
1 2 3 4 5
b
1
b
2
a
3
a
4
a
5
x
13
x
14
x
23
x
24
x
25
Figure 1: Example elevator trip.
The OD passenger counts are related to the mea-
LinearProgrammingFormulationoftheElevatorTripOrigin-destinationMatrixEstimationProblem
151
sured boarding and alighting counts through the so
called flow conservation constraints, i.e., the total
flow out of the node i, i ∈ N
+
, equals b
i
, and the total
flow into the node j, j ∈ N
−
, equals a
j
:
∑
j|(i, j)∈A
x
ij
= b
i
∀i ∈ N
+
, (1)
∑
i|(i, j)∈A
x
ij
= a
j
∀ j ∈ N
−
. (2)
We assume that if there is a delivery request from
an origin node to a destination node, then at least one
passenger must be assigned to that OD pair. Hence,
we obtain the following lower bounds for the OD pas-
senger counts:
l
ij
=
1, if i → j
0, otherwise
, (3)
where i → j signifies that a delivery request is regis-
tered from node i to node j.
The lower bounds could be further tightened. For
example, in Figure 1, the lower bound for the OD
passenger count x
25
would be a
5
. We assume, how-
ever, that the tightening of the bounds is done in the
solver before solving the problem. We also assume
that the measured boarding and alighting counts are
consistent, i.e.,
∑
i∈N
+
b
i
=
∑
i∈N
−
a
i
, and this holds
also when the lower bounds are subtracted from the
counts.
2.1 Properties
For every elevator trip with two or more nodes, m ≥ 2,
the number of arcs n satisfies the following bounds:
m− 1 ≤ n ≤ m(m− 1)/2. (4)
The lower bound is the minimum number of edges
and the upper bound is the maximum number of edges
in any undirected graph. Since the elevator does
not change direction during a single trip, the graph
describing the elevator trip is acyclic, and thus, the
bounds for undirected graphs are valid.
The coefficient matrix corresponding to the con-
straints (1) and (2) is the node-incidence matrix of the
elevator trip. This matrix contains p = |N
+
| + |N
−
|
rows and n columns, and its rank is p − 1 (Bazaraa
et al., 2009). Note that any node on the elevator
trip that is both a pickup and a delivery node can
be split in two successive nodes so that the result-
ing delivery node precedes the pickup node. Then,
p = m and equation (4) implies that n ≥ p− 1 always.
This means that when the node-arc incidence matrix
is over-determined, n < p, then n = p−1 and the ma-
trix has full rank equal to p− 1. In this case there is a
unique OD passenger count vector satisfying the con-
straints (1)-(3). When the matrix is exactly- or under-
determined, n ≥ p, it is also rank deficient and there
are always more than one OD passenger count vec-
tor satisfying the constraints. A unique solution can
be obtained by formulating the problem of finding the
elevator trip OD passenger counts as a minimum cost
network flow problem.
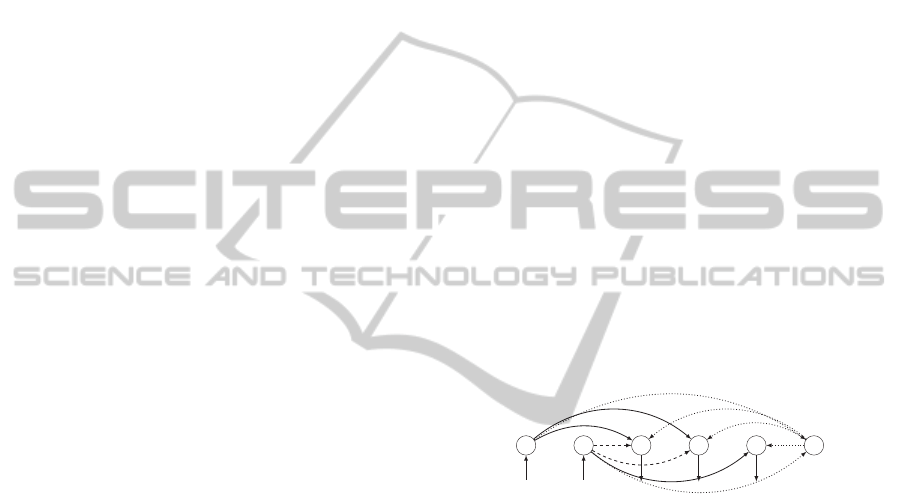
2.2 Minimum Cost Network Flow
Formulation
To model the elevator trip OD matrix estimation prob-
lem as a minimum cost network flow problem, we
augment the directed network describing the eleva-
tor trip as is done in the simplex method for network
flow problems to find an initial basic feasible solution
(Bazaraa et al., 2009). We first add to the network
an additional node m + 1, N = N ∪ {m + 1}. Then,
for every pickup node i ∈ N
+
we define the OD pair
(i,m + 1) and for every delivery node j ∈ N
−
the OD
pair (m+ 1, j), and add the corresponding new arcs to
the set A. The lower bound for each of these arcs is
zero. Figure 2 presents the elevator trip of Figure 1
with these additions. A dotted arc corresponds to an
OD pair incident to or from the additional node.
1 2 3 4 5 6
b
1
b
2
a
3
a
4
a
5
x
13
x
14
x
16
x
23
x
24
x
25
x
26
x
63
x
64
x
65
Figure 2: Augmented example elevator trip.
We set the cost of each arc (i, j), c
ij
, not incident
to or from the additional node m + 1 equal to zero,
and the cost of each arc incident to or from the addi-
tional node equal to one. The elevator trip OD matrix
estimation problem can now be mathematically for-
mulated as a minimum cost network flow problem as
follows:
Minimize
∑
i∈N
+
x
im+1
+
∑
j∈N
−
x
m+1j
subject to
∑
j|(i, j)∈A
x
ij
= b
i
∀i ∈ N
+
(5)
∑
i|(i, j)∈A
x
ij
= a
j
∀ j ∈ N
−
(6)
∑
i|(i,m+1)∈A
x
im+1
+
∑
j|(m+1, j)∈A
x
m+1j
= 0 (7)
x
ij
≥ l
ij
∀(i, j) ∈ A.
Note that the optimal value of the objective function
is zero, i.e., the OD passenger counts of the arcs in-
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
152

cident to or from the additional node are zero. Fur-
thermore, because the measured boarding and alight-
ing counts b
i
and a
j
are always integer-valued and
the node-incidence matrix defined by the constraints
(5)-(7) is always totally unimodular, all solutions to
the problem are always integer-valued (Bazaraa et al.,
2009).
3 BRANCH-AND-BOUND
ALGORITHM
All solutions to the elevator trip OD matrix estima-
tion problem can be found with a branch-and-bound
algorithm presented in Algorithm 1. The algorithm is
similar to the second phase of the one-tree algorithm
(Danna et al., 2007). One difference between the al-
gorithms is that our algorithm can be used only when
the solutions to the linear program (LP) are integer-
valued. A second difference is that we accept only
optimal solutions, i.e., whose objective value is zero,
whereas the one-tree algorithm also accepts solutions
whose objectivevalue does not differ more than a pre-
defined percentage of the optimal value. Third, in our
algorithm every node always stores the solution of the
LP defined by that node. Hence, when we select a
new node from the set N, the solution of the LP at
that node is readily available, and we proceed to test
whether all variables at the node are fixed by the local
bounds of the node. If there is a variable that is not
fixed by the local bounds, we branch with respect to
one such variable, otherwise the node is fathomed.
When branching with respect to variable i at node
n, we form the child nodes n
1
and n
2
so that they do
not contain the value of the variable i at node n, x
i
(n).
To find also other optimal solutions where the valueof
the variable i is equal to x
i
(n), we set the local bounds
of this variable at node n equal to x
i
(n) and add it
back to the set of nodes N. When node n is next time
selected from the set N, branching at this node is done
with respect to some other variable than i, or the node
is fathomed. Furthermore, the child nodes and the
corresponding solutions are added to the sets N and S
only if the solutions are optimal.
It is not always necessary to create two child
nodes. For example, when the value of the variable
i at node n is equal to its lower bound, x
i
(n) = l
i
(n),
we create only the right children n
1
= {x
i
≥ x
i
(n)+1}
and fix the upper bound of variable i at node n equal
to its lower bound, i.e., to its value, u
i
(n) = x
i
(n). In
addition, our branching strategy does not produce du-
plicate solutions. There are also other possibly more
efficient algorithms than branch-and-boundto find in-
teger solutions to network flow problems (Baldoni-
Algorithm 1: Branch-and-bound algorithm.
Set of nodes: N ← {rootnode}
Solve LP at node rootnode.
Set of solutions: S ← {x(rootnode)}
while N 6=
/
0 do
Select node n from N.
Set of nodes: N ← N \ {n}
if there exists a variable i that is not fixed by local
bounds of node n: l
i
(n) < u
i
(n) then
Create child nodes and fix bounds of node n:
n
1
= {x
i
≤ x
i
(n) − 1}, n
2
= {x
i
≥ x
i
(n) + 1}
and l
i
(n) = u
i
(n) = x
i
(n)
Set of nodes: N ← N ∪ {n}
for j = 1 → 2 do
Solve LP at node n
j
.
if objective z(n
j
) = 0 then
Set of solutions: S ← S∪ {x(n
j
)}
Set of nodes: N ← N ∪ {n
j
}
end if
end for
end if
end while
Silva et al., 2003) but these are not considered in this
paper.
4 NUMERICAL EXPERIMENTS
To study the performanceof the branch-and-boundal-
gorithm, we formed four example problems. These
problems were selected based on simulations ran
with the Building Traffic Simulator (BTS), and they
are typical for the elevator trip OD matrix estima-
tion problem (Siikonen et al., 2001; Kuusinen et al.,
2012).
The branch-and-bound algorithm was imple-
mented with MATLAB 7.10.0 (R2010a) on a Pentium
2.66 GHz machine with 3.0 GB memory and Win-
dows XP. The LP at each node was solved using the
Cplex Class API provided in the CPLEX Optimiza-
tion Studio V12.2 for MATLAB. CPLEX was chosen
since it is somewhat the academic and industry stan-
dard for linear optimization problems.
The Cplex class provides methods for the manip-
ulation of the model, which can be used to increase
solving speed. One important manipulation is the se-
lection of the algorithm used by the Cplex instance.
When the LP is solved for the first time at the root
node of the branch-and-bound tree, the algorithm of
choice is the network simplex algorithm since it tends
to be faster than a general simplex algorithm for net-
work flow problems (Bertsimas and Tsitsiklis, 1997).
LinearProgrammingFormulationoftheElevatorTripOrigin-destinationMatrixEstimationProblem
153
Another advantage of the Cplex class is that after
solving a LP, the solution and the corresponding basis
can be obtained from the Cplex instance. Every node
stores this basis which is used as a starting basis at its
child nodes together with the dual simplex algorithm.
This is a typical approach in branch-and-bound algo-
rithms where the subproblem at each node is a LP and
can be solved using a simplex method.
4.1 Example Problems
Problem 1, an over-determined problem, excluding
the additional node and arcs, consists of the follow-
ing nodes, arcs, and boarding and alighting passenger
count vectors:
N
+
= {1,2,3}, N
−
= {3,4},
A = {(1,3),(2, 3),(2,4),(3,4)},
b = [10,11,11], a = [11,21].
The lower bound of an arc written in bold equals one,
and zero otherwise. Hence, an arc written in bold
means that the passengers who board the elevator at
the origin of the OD pair register a delivery request to
the destination of the OD pair. Otherwise, the deliv-
ery request to the destination is registered at an ori-
gin before the origin of the OD pair. Furthermore, in
this problem there is no arc (1,4) because the deliv-
ery request to node 4 is registered by the passengers
who board the elevator at node 2, and thus, the pas-
sengers who board the elevator at node 1 cannot be
traveling to node 4. The boarding and alighting pas-
senger count vectors are formed with respect to the
order of the nodes in the sets N
+
and N
−
. For ex-
ample, b
1
= 10, b
2
= 11, b
3
= 11, and a
3
= 11 and
a
4
= 21 for Problem 1.
Problem 2, an exactly-determined problem is de-
fined by:
N
+
= {1,2,5}, N
−
= {3,4,6},
A = {(1, 3),(1, 4),(2,3),(2, 4),(2,6),(5,6)},
b = [10,11,10], a = [5,10,16],
and Problem 3, an under-determined problem by:
N
+
= {1,2,3,4}, N
−
= {5,6,7},
A = {(1,5),(1, 6),(1, 7),(2,5),(2, 6),(2,7),
(3,5),(3, 6),(3,7), (4,5),(4, 6),(4,7)},
b = [6,5,5,5], a = [7, 7,7].
Finally, Problem 4, also an under-determinedproblem
is defined by:
N
+
= {1,2,5,6}, N
−
= {2,.. .,16},
A = {(1,2),... ,(1,6),(1, 8),.. .,(1,16),
(2,3),... ,(2,6), (2,7),(2, 8),...,(2, 16),
(5,6),... ,(5,16),(6,7),. ..,(6,16)},
b = [21,1,2,1],
a = [5,1,2,2,2,1,1, 1,2,1,1,2, 2,1,1].
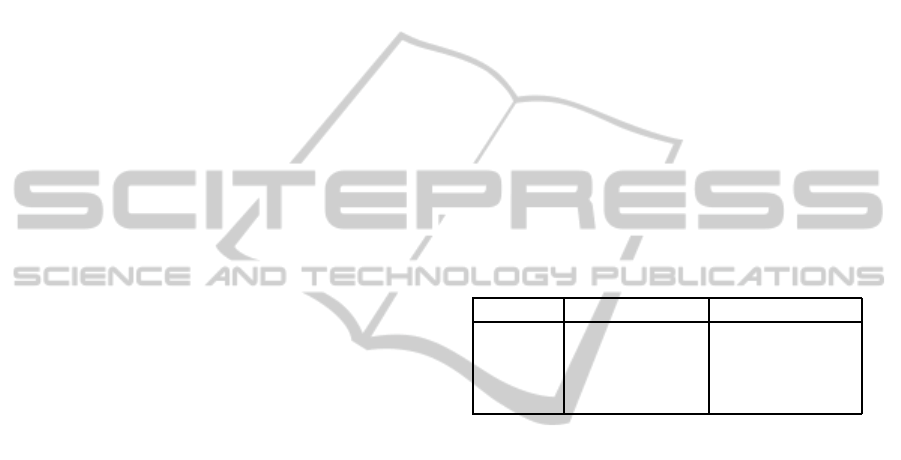
4.2 Numerical Results
The performance of the branch-and-bound algorithm
is studied based on the execution time in seconds. To
account for the machine dependent variations in the
execution time, we solved the first, second and fourth
problem 500 times, and the third problem 10 times,
and computed the average execution time of these
runs. The third problem was solved only 10 times be-
cause of a much longer execution time. Table 1 shows
the results, namely, the average execution time in sec-
onds and the number of solutions for each problem.
Table 1: Results of the numerical experiments.
Problem Execution time No. of solutions
1 0.0075 1
2 0.22 5
3 68.6737 2016
4 1.0513 9
It can be seen that as the number of solutions in-
creases, the execution time increases. The shorter the
execution time, the more information about the pas-
senger traffic the elevator group control has at the
moment of making a dispatching decision. Further-
more, the group control has to make a decision typ-
ically in less than 0.5 seconds. Hence, we conclude
that in a real time application, the minimum cost net-
work flow formulation and the branch-and-bound al-
gorithm can be used to find all solutions to problems
corresponding to Problems 1 and 2, i.e., over- and
exactly-determined problems. Fortunately, most real
problems are either over- or exactly-determined (Ku-
usinen et al., 2012).
5 CONCLUSIONS
In this paper, we studied the problem of finding the
origin-destination (OD) passenger counts for the OD
pairs of an elevator trip. An elevator trip is formally
defined as successive stops in one direction of travel
with passengers inside the elevator. We formulated
the problem as a minimum cost network flow prob-
lem. This formulation can be used to estimate the OD
passenger counts for elevator trips where the observed
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
154

number of boarding and alighting passengers are con-
sistent. The elevator trip OD matrices estimated for
a given time interval are combined to form a build-
ing OD matrix that describes the traffic flow between
every pair of floors in the building during that inter-
val. These matrices form traffic statistics that are used
to forecast future traffic. The elevator group control
uses these forecasts to make robust call allocation de-
cisions in constantly changing traffic conditions.
The coefficient matrix associated with the so
called flow conservation constraints is either over-,
exactly- or under-determined. In the last two cases the
problem has always more than one solution. We pre-
sented a simple branch-and-bound algorithm to find
all solutions to the problem. When all solutions are
available and one is selected randomly, the long-term
traffic statistics, i.e., building OD matrices, are not
affected by the algorithm used to solve the problem,
and thus, model better the possible realizations of the
passenger traffic. This is desirable when the statistics
are the basis of the passenger traffic forecasts used
in elevator dispatching. To assess the performance of
the algorithm, we studied its execution time in solv-
ing four example problems. Based on the results, the
formulation and algorithm can be used in a real time
elevator group control application to solve over- and
exactly-determined problems. Fortunately, most real
problems correspond to these problems.
As the results suggest, the execution time is not
acceptable for under-determinedelevator trip OD ma-
trix estimation problems. Hence, an ongoing research
is to find more efficient ways to solve the problem.
We are also studying methods that can be used to esti-
mate the elevator trip OD matrices in the presence of
inconsistent boarding and alighting counts. A future
challenge is to find out what method to use to make
forecasts based on the collected traffic statistics, and
detect whether the forecasts made for a given time in-
terval are adequate, and thus, can be used by the ele-
vator group control application.
REFERENCES
Baldoni-Silva, W., De Loera, J., and Vergne, M. (2003).
Counting integer flows in networks. Retrieved De-
cember 17, 2012, from http://www.math.ucdavis.edu/
˜latte/theory/totalresidue.pdf.
Bazaraa, M., Jarvis, J., and Sherali, H. (2009). Linear Pro-
gramming and Network Flows. John Wiley & Sons,
Hoboken, New Jersey, 4th edition.
Bell, M. (1983). The estimation of an origin-destination
matrix from traffic counts. Transportation Science,
17(2):198–217.
Ben-Akiva, M., Macke, P., and Hsu, P. (1985). Alternative
methods to estimate route-level trip tables and expand
on-board surveys. Transportation Research Record,
1037:1–11.
Bertsimas, D. and Tsitsiklis, J. (1997). Introduction to Lin-
ear Optimization. Athena Scientific/Dynamic Ideas,
LLC, Nashua/Charlestown, U.S.A., 4th edition.
Cascetta, E. and Nguyen, S. (1988). A unified framework
for estimating or updating origin/destination matrices
from traffic counts. Transportation Research Part B,
22(6):437–455.
Danna, E., Fenelon, M., Gu, Z., and Wunderling, R. (2007).
Generating multiple solutions for mixed integer pro-
gramming problems. In IPCO 2007, LNCS 4513,
pages 280–294. Springer-Verlag.
Fisk, C. (1988). On combining maximum entropy trip ma-
trix estimation with user optimal assignment. Trans-
portation Research Part B, 22(1):69–79.
Furth, P. and Navick, D. (1992). Bus route o-d matrix
generation: Relationship between biproportional and
recursive methods. Tranportation Research Record,
1338:14–21.
Kuusinen, J.-M., Sorsa, J., and Siikonen, M.-L. (2012).
The elevator trip origin-destination matrix estimation
problem. Unpublished manuscript submitted to Trans-
portation Science 4.7.2012.
Lamond, B. and Stewart, N. (1981). Bregman’s balancing
method. Transportation Research Part B, 15(4):239–
248.
Li, B. (2009). Markov models for bayesian analysis about
transit route origin-destination matrices. Transporta-
tion Research Part B, 43(3):301–310.
Li, Y. and Cassidy, M. (2007). A generalized and effi-
cient algorithm for estimating transit route ods from
passenger counts. Transportation Research Part B,
41(1):114–125.
Lundgren, J. and Peterson, A. (2008). A heuristic for the
bilevel origin-destination matrix estimation problem.
Transportation Research Part B, 42(4):339–354.
Maher, M. J. (1983). Inferences on trip matrices from ob-
servations on link volumes: a bayesian statistical ap-
proach. Transportation Research Part B, 17(6):435–
447.
Nguyen, S. (1984). Estimating origin-destination matrices
from observed flows. In Florian, M., editor, Trans-
portation Planning Models, pages 363–380. North-
Holland, Amsterdam.
Siikonen, M.-L., Susi, T., and Hakonen, H. (2001). Passen-
ger traffic flow simulation in tall buildings. Elevator
World, August:117–123.
Tsygalnitsky, S. (1977). Simplified methods for transporta-
tion planning. Master’s thesis, Department of Civil
Engineering, Massachusetts Institute of Technology,
Cambridge.
Yoneda, K. (2007). Elevator trip distribution for inconsis-
tent passenger input-output data. Decision Making in
Manufacturing and Services, 1(1-2):175–190.
Zuylen, H. V. and Willumsen, L. (1980). The most likely
trip matrix estimated from traffic counts. Transporta-
tion Research Part B, 14:281–293.
LinearProgrammingFormulationoftheElevatorTripOrigin-destinationMatrixEstimationProblem
155
