
An Efficient Method for Surface Registration
Tomislav Pribanic
1
, Yago Diez
2
, Sergio Fernandez
2
and Joaquim Salvi
2
1
Faculty of Electrical Engineering and Computing, University of Zagreb, Unska 3, 10000 Zagreb, Croatia
2
Institute of Informatics and Applications, University of Girona, 17071 Girona, Spain
Keywords: Surface Registration, 3D Reconstruction, Structured Light, Inertial Sensor.
Abstract: 3D object data acquired from different viewpoints are usually expressed in different spatial coordinate
systems where systems’ spatial relations are defined by Euclidean transformation parameters: three rotation
angles and a translation vector. The computation of those Euclidean parameters is a task of surface
registration. In a nutshell all registration methods revolve around two goals: first how to extract the most
reliable features for correspondence search between views in order to come up with the set of candidate
solutions, secondly how to quickly pinpoint the best, i.e. satisfying, solution. Occasionally some registration
method expects also other data, e.g. normal vectors, to be provided besides 3D position data. However, no
method assumed the possibility that part of Euclidean parameters could be reliably known in advance.
Acknowledging technology advancements we argue that it become relatively convenient to include in 3D
reconstruction system some inertial sensor which readily provides info about data orientation. Assuming
that such data is provided, we demonstrate a simple, but yet time efficient and accurate registration method.
1 INTRODUCTION
The task of a surface registration is to fuse 3D data
originally acquired from different viewpoints (Salvi
et al., 2007). To this end it is required to find the 6
degrees of freedom: three rotation angles and three
dimensional translation vector that describe a spatial
relationship between a pair of viewpoints. An
alternative to readily solve the surface registration,
using rotating tables and/or robot arms, is neither
always available nor a feasible solution due to the
number of degrees of freedom of the mechanics and
particularly in the case of large surfaces, self-
occlusion areas etc. Consequently software based,
coarse and fine, surface registration methods have
been investigated which operate on 3D data only.
The former searches for a good enough initial
estimate which is then usually refined by some fine
registration method.
The majority of published algorithms, except for
few PCA based exceptions (Chung and Lee, 1998),
consist of two important phases: first a selection of
candidate solutions, and second, the detection of the
optimal candidate solution. The intrinsic
combinatorial complexity of the problem causes
that, for all algorithms, both phases are very likely to
be memory and time demanding, as well as sensitive
to outliers. Genetic (Santamaría et al., 2011) and
RANSAC based algorithms (Diez et al., 2012) are
known for its reliability to give eventually a good
solution, but at the expense of a substantial
computation time which can make them quite
impractical. On the other hand, a ready to use PCA
fast solutions are additionally sensitive to the object
symmetries (otherwise common problem to all other
methods too) and a requirement for a large overlap
between views. Next, most methods require at least
three correspondences between pair of views to
define a candidate solution. Even if they seemingly
require only a single correspondence (Feldmar and
Ayache, 1994) then there is a substantial pre-
processing involved during which a feature vector
for every point is first found and afterwards used for
the extensive comparisons. Finally, some methods
(Makadia et al., 2006) expect as input from 3D
reconstruction system not only 3D point position
data, but also a normal vector in every 3D point.
Somewhat surprisingly, it appears that neither
method expected a possibility if a part of Euclidean
parameters are known in advance, rather they try to
solve all six Euclidean transformation unknowns.
In this work we propose a surface registration
method assuming that rotation is provided by an
inertial sensor (e.g. MTx, 2012), and translation
500
Pribanic T., Diez Y., Fernandez S. and Salvi J..
An Efficient Method for Surface Registration.
DOI: 10.5220/0004346505000503
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 500-503
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
vector is still left to be found. We justify our
assumption by the fact that nowadays technologies
have made quite affordable a large pallet of various
inertial devices which reliably outputs data about
object orientation. This is not only present in popular
smart phones and accessories for video games, but
there are also smart cameras which have an
embedded on-board inertial sensor for orientation
detection in 3D space (Shirmohammadi and Taylor,
2011). Nevertheless, it seems that this fact has not
been exploited in the context of surface registration.
2 METHOD DEFINTION
The proposed method consists of the following
straightforward steps:
1 Given a pair of views A and B align them
partially using the system provided (ideally from
some embedded inertial sensors) orientation data
(rotation angles).
2. Pick a single point X
A
from view A for which
a correspondence in the second view exists.
3. Sample (e.g. uniformly) a set of M points X
Bi
from the second view B, where is typically M≤100.
4. Construct a candidate translation vector
between point X
A
and every point i from X
Bi
set. For
every translation vector candidate solution, translate
views A and B into common reference system and
evaluate the goodness of solution using some merit
function. For a further consideration, keep only a
single X
B
from X
Bi
set for which an extreme of merit
function is achieved.
5. Take the closest N points (~100) to X
B
and
similar as in step 4, define N candidate translation
vectors, for each of them translate A to B view,
evaluate the goodness of potential solution using
some merit function. At last, the one for which an
extreme of merit function is achieved, take as a final
solution.
3 EXPERIMENTS
In this work we have used 3D data from a structured
light scanning of mannequin head from several
different viewpoints (Figure 1). The white markers
set on it (Figure 2) served as control points to
compute registration data and are in the subsequent
experiments considered as ground truth data. In fact,
we use those control points to compute rotation data
between views just as if they were provided by some
inertial sensor.
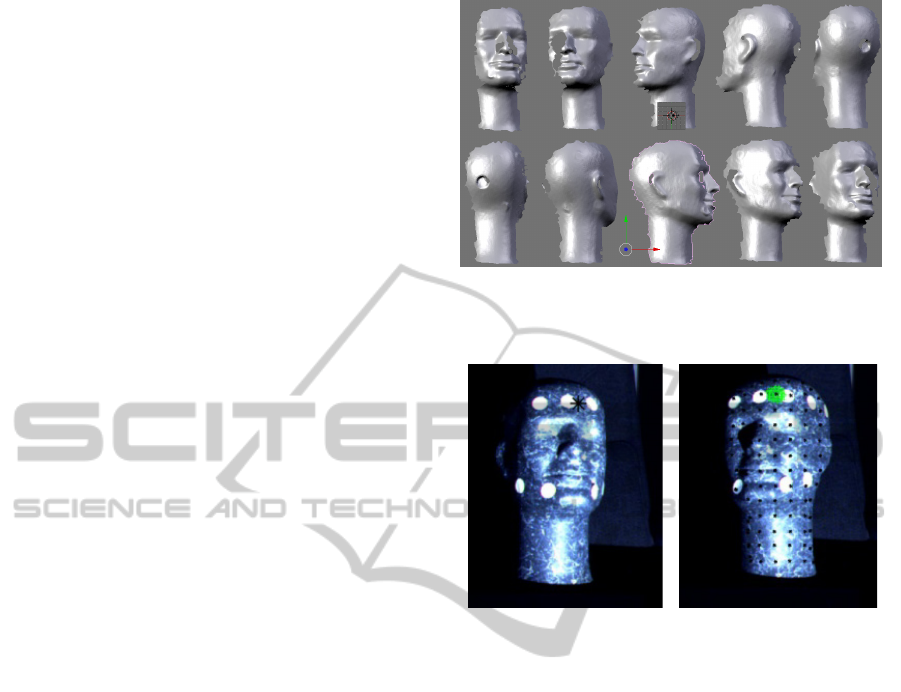
Figure 1: A screen snap from Blender software package
where 3D raw data from ten viewpoints were input and
surface meshes created.
Figure 2: Camera images for a pair of views A and B. See
text for more details.
The left image on Figure 2 is an example of view A
and the black star on is a point chosen for which a
correspondent one is searched in the view B (right
image). Black dots on the view B image represent
the actual candidate solutions sampled during step 3
and processed during step 4 of the proposed method.
The green area is neighborhood within which a
correct solution is, i.e. within which a final solution
is searched (step 5).
Figure 3 shows an alignment between two views
after applying a rotation. The right (blue) and left
(red) point clouds are view A and B respectively.
The black dots on the view B point cloud, the green
area marked on it and the black star on the view A
point cloud represent the same points as already
introduced for Figure 2, but now in 3D space.
Moreover, black dots on Figure 3 shows that
even a sparse consideration of candidate solution
allows a pretty good estimate of the final one.
Hence, a candidate solution providing an extreme of
merit function after step 4 is actually a black dot
within a green area. Thus, the green area on Figure 3
shows the neighborhood of points which is further
evaluated in order to set a final solution (step five).
AnEfficientMethodforSurfaceRegistration
501
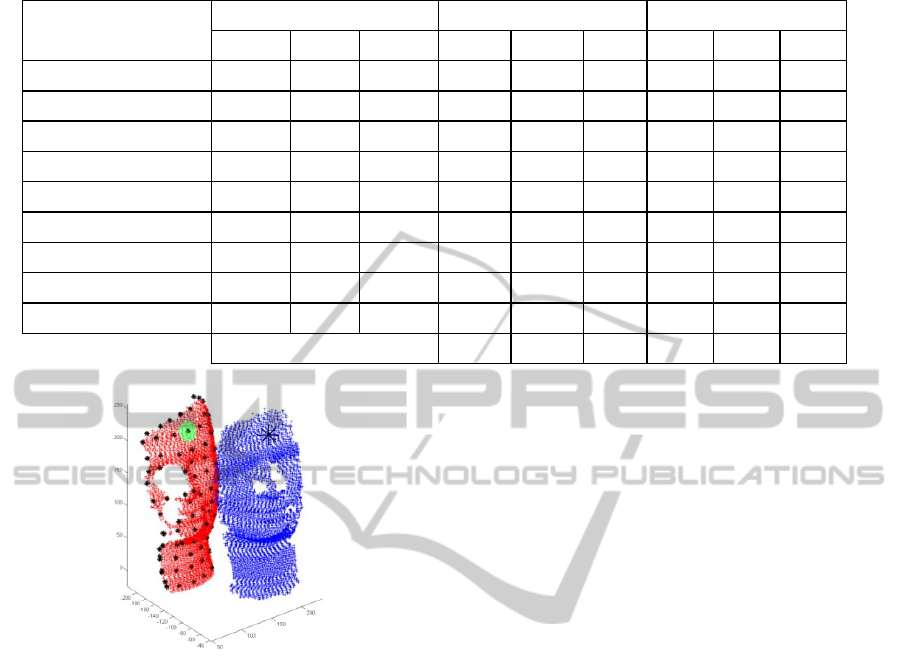
Table 1: Comparison of the ground truth data with the initially computed and final results.
View Pair Number
of Points
Ground truth data[mm] Error initial solution[mm] Error final solution[mm]
T
x
T
y
T
z
∆T
x
∆T
y
∆T
z
∆T
x
∆T
y
∆T
z
(33110, 34109) -75,72 -16,25 -86,57 -6,10 -5,12 -0,06 -0,98 -0,47 -0,38
(34109, 39255) -119,04 -19,89 -104,45 -2,29 -7,33 0,14 -1,59 -1,97 -1,24
(39255, 43096) -158,73 -37,78 -194,54 -8,46 1,98 -4,73 -1,36 0,21 -0,87
(43096, 38759) -111,19 -8,00 -54,98 -4,10 7,40 4,63 -1,60 1,92 2,33
(38759, 35371) -102,26 -27,49 -156,87 8,88 13,00 -4,64 -3,76 4,36 -3,86
(35371, 39647) -133,69 -21,36 -104,36 -4,84 -10,29 0,17 -2,47 -4,18 0,44
(39647, 44440) -133,58 -30,09 -155,76 0,55 -11,91 -4,17 -2,35 -1,27 -1,96
(44440, 41044) -44,59 -8,93 -59,90 -1,10 5,82 -2,49 -0,10 0,23 0,09
(41044, 36357) -82,26 -13,36 -65,99 -12,06 -0,17 -2,61 -1,65 0,08 -2,57
Absolute average error[mm] 5,38 7,00 2,63 1,76 1,63 1,52
Figure 3: An alignment of 3D point clouds (downsampled
for better visualization) from two views after applying a
rotation. See text for more detail.
Table 1 is a representative example of extensive
experimenting using real 3D noisy data and it
demonstrates a very good agreement of ground truth
data for translation vector components with the
computed values. The central table rows resemble
the registration of back of the mannequin head
which due to symmetries (Figure 1) is harder to
register and consequently a slight decrease in
accuracy is witnessed.
Although the speed optimization was out of the
scope of this work (Park et. al., 2011), for
completeness we stress out that it took about 4
minutes in Matlab to align a pair of views (Intel
Core 2 DUO 2.5GHz), where we used all available
points (>35000 points, first column Table 1). We
point out that such excessive number of points is
normally not used in practice (Salvi et al., 2007).
When we downsampled our 3D point clouds to be
~6000 points (note this is still a rather large number
for registration) per view, we have acquired
basically the same results as in Table 1 (not shown
here for the lack of space). But in addition, the
processing time significantly dropped to only 10-15
seconds per view pair, even using this noticeably
suboptimal Matlab code version. Based on this
timing and earlier experience, we estimate that even
CPU optimized C like code (future work) would
allow processing time in matter of seconds for point
clouds of size 15000-20000 points.
4 DISCUSSION
AND CONCLUSIONS
Unlike other methods the proposed one does not pre-
process data in order to first compute certain
Euclidean invariants and/or local features around
candidate points (Chua, 1997). The proposed
method has basically an inherent Euclidean invariant
which allows that after rotation alignment is done
then all points needs to be moved by the very same
translation vector. Since for a some point in view A
we know that there is its correspondent point in view
B we simply search for the best candidate in view B
which minimizes our merit function. However, we
do not perform an exhaustive search, typical for
some RANSAC based approaches, of all candidate
solutions in view B. In our particular experiment it
was sufficient to try altogether just a couple hundred
of candidate solutions to reach a final one. But we
note that we did essentially work all the time with all
available reconstructed points (~30000 to 40000
points per view). It means that we have tested <1%
of possible solutions. At the same time, no initial
data downsampling (Trucco et al., 1999) was
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
502

performed to make the method actually applicable.
Our method uses a point-to-point correspondences
strategy, which is generally much simpler than
curves or surface correspondence (Wyngaerd, 2002).
The merit function used here to estimate candidate
solution quality is very simple one: distance point-
to-point. We do not require implementation of point-
to-plane distances known to be more robust, but also
harder to compute (Rusinkiewicz and Levoy, 2001).
As shown the method performs quite well even
without removing any outliers (Dalley and Flynn,
2002) and we do not bother with the computing and
assigning different weights during processing
(Godin et al., 1994). In addition, our method does
not require a priory any initial guess for the searched
translation vector, but computes accurately even a
final solution and therefore can be recognized as
both coarse and final method in one. In terms of
speed and simplicity our method resembles the
character of PCA method, but it is also quite less
subtle to the size of overlapping regions. Our
method is general purpose one, meaning that to be
successfully applied it does not require any typical
environment, such as buildings where planar regions
and straight lines are expected (Stamos and
Leordeanu, 2003). Furthermore, no estimation of
certain experimental parameters is needed, as usual
in some genetic algorithms. We think that
technology associated with inertial sensor has
become mature enough to be more affordable, and
therefore, additional cost justified. Particularly if we
compare it with the alternative of using rotation
tables and/or robot arms which can be also
prohibitive in many practical situations. Our future
course is the implementation of proposed idea using
the actual inertial sensor which experimenting began
during the submission of this work.
ACKNOWLEDGEMENTS
This work has been supported by the University of
Zagreb Development Fund, Croatia. Additionally
this work has been partially supported by the project
ANDREA/RAIMON – Autonomous Underwater
Robot for Marine Fish Farms Inspection and
Monitoring (Ref CTM2011-29691-C02-02) funded
by the Spanish Ministry of Science and Innovation.
REFERENCES
Chua, C. J. R., 1997. Point signatures: a new
representation for 3d object recognition, Int. J.
Comput. Vision 25 1, 63–85.
Chung, D., Lee, Y. D. S. 1998. Registration of multiple-
range views using the reverse-calibration technique,
Pattern Recogn. 31 (4) 457–464.
Dalley, G., Flynn, P., 2002. Pair-wise range image
registration: a study in outlier classification, Comput.
Vis. Image Und. 87 (1–3), 104–115.
Diez, Y., Martí, J., Salvi, J., 2012. Hierarchical Normal
Space Sampling to speed up point cloud coarse
matching Pattern Recognition Letters 33 (16), 2127–
2133
Feldmar, J., Ayache, N., 1994. Rigid, affine and locally
affine registration of free-form surfaces, Tech. rep.,
Technical Report of INRIA, Sophia Antipolis.
Godin, G., Rioux, M., Baribeau, R., 1994. Three-
dimensional registration using range and intensity
information, in: Proceedings of SPIE Videometric III,
vol. 2350, pp. 279–290.
Makadia A., Patterson A., Daniilidis K., 2006. Fully
automatic registration of 3D point clouds. In
Proceedings of the 2006 IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition-Volume I, pp. 1297-1304.
MTx Access date: November 2012. http://www.xsens.com
Park, S.-Y., Choi, S.-I., Kim, J., Chae, J. S., 2011. Real-
time 3D registration using GPU. Machine Vision and
Applications, 22 5, 837-850
Rusinkiewicz, S., Levoy, M., 2001. Efficient variant of the
ICP algorithm, in: 3rd International Conference on 3-
D Digital Imaging and Modeling, pp. 145–152
Salvi, J., Matabosch, C., Fofi, D., Forest, F., 2007. A
review of recent range image registration methods
with accuracy evaluation. Image and Vision
Computing 25, pp. 578–596.
Santamaría, J., Cordon, O., Damas, S., 2011. A
comparative study of state-of-the-art evolutionary
image registration methods for 3D modelling.
Computer Vision and Image Understanding. 115,
Issue 9, 1340-1354
Shirmohammadi, B., Taylor, C. J., 2011. Self-localizing
smart camera networks. ACM Transactions on
Embedded Computing Systems, Vol. 8, pp. 1-26.
Stamos, I., Leordeanu, M., 2003. Automated feature-based
range registration of urban scenes of large scale, in:
IEEE Computer Society Conference on Computer
Vision and Pattern Recognition, vol. 2, pp. 555–561
Trucco, E., Fusiello, A., Roberto, V., 1999. Robust motion
and correspondences of noisy 3-d point sets with
missing data, Pattern Recogn. Lett. 20 (9) 889–898.
Wyngaerd, J. V., 2002. Automatic crude patch
registration: Toward automatic 3d model building,
Comput. Vis. Image Und. (87) 8–26.
AnEfficientMethodforSurfaceRegistration
503
