
High Level Design of Adaptive Real-time Embedded Systems
A Survey
Mouna Ben Said, Yessine Hadj Kacem, Nader Ben Amor and Mohamed Abid
University of Sfax, ENIS, CES Laboratory, Soukra km 3.5, B.P. 1173-3000 Sfax, Tunisia
Keywords:
Adaptation, MDE, UML/MARTE, RTES, Timing Constraints.
Abstract:
Real time embedded systems (RTES) know a growing complexity due to modern applications requirements
and architectures complexity especially with the addition of the multiprocessor feature. They are equally
subject to a variety of constraints due to their mobility. They need to react to environment variability, resource
limitations and timing constraints. An emergent solution to deal with this complexity is the integration of
adaptation strategies in embedded systems design flow. The design space of multi-layer adaptation decisions
is becoming increasingly vast and difficult to explore. Development of such systems at low system levels is
therefore increasingly tedious especially with the limitations of computer aided design tools. Using MDE
approach and the UML/MARTE profile for high abstraction level design is becoming a promising solution
to ease the design of RTES. In the present paper we recall and classify existing works built around adaptive
embedded systems. We concentrate on a set of criteria to help highlighting the shortages of existing approaches
on modern adaptive RTES design. We focus on the design environment, adaptation features, online time
constraints verification and performance assessment. Finally, we present our future works to cope with the
limits of existing solutions while taking into account the observed criteria.
1 INTRODUCTION
Compared to conventional desktop and server sys-
tems, real-time embedded systems are often subject
to numerous constraints due to their mobility. These
include (i) limitations on local resources, imposed by
weight and size constraints, concern for power con-
sumption, and lowered trust and robustness result-
ing from exposure and motion, and (ii) environment
variations such as unpredictable variation of network
load. This makes it impossible to yield an offline opti-
mization. Thus, RTES are asked to dynamically self-
adapt internally to their limited computational and en-
ergy resources as well as to changes in their surround-
ing environment in order to offer the required quality
of service. Self-adaptive systems change their behav-
ior or structure, at run-time, in response to variations
in their execution environmentand according to adap-
tation engine decisions. Researchers have focused on
the integration of adaptation strategies in embedded
systems which further hardens designers’ task. An-
other complexity dimension is added to such systems’
development through their prominent evolution to in-
creasingly complex multiprocessor architectures. In
this way, their design space containing adaptation de-
cisions at different system layers (architecture, appli-
cation, operationg system and network) is becoming
increasingly vast and difficult to explore, especially
with the limitations of computer aided design tools.
Therefore, developing such complex systems using
classic design approaches, which handle technical de-
tails at low system levels, is no more an efficient so-
lution.
There have been numerous contributions in adap-
tation for RTES at both hardware and software (op-
erating system, application) layers. However, there
is a lack of standard formalization of the adaptation
logic that is understandable by everyone, platform-
independent and reusable. At present, there are
great improvements of high level design methods
based on Model Driven Engineering (MDE) method-
ology (Schmidt, 2006) and specifically using the
UML/MARTE (Modeling and Analysis of Real-Time
and Embedded Systems) profile (Group, 2011). Au-
thors in (Gogniat et al., 2010) assert the strong need
for abstraction mechanisms to cope with the limits
of existing design flows and associated tools that are
too tied to hardware platforms and permit designers
to develop more efficient systems. Model based ap-
proachespermit to decrease the complexity of modern
systems using the abstraction mechanism while in-
creasing productivity and reusability and minimizing
341
Ben Said M., Hadj Kacem Y., Ben Amor N. and Abid M..
High Level Design of Adaptive Real-time Embedded Systems - A Survey.
DOI: 10.5220/0004381703410350
In Proceedings of the 1st International Conference on Model-Driven Engineering and Software Development (MODA-2013), pages 341-350
ISBN: 978-989-8565-42-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

cost and Time to Market. The MARTE profile permits
to jointly model both hardware and software parts of
RTES which eases the communication between de-
signers and reduces design errors. It allows, as well,
performance and schedulability analysis. However,
existing MDE based adaptation approaches do not
deal with the complete process of adaptation in RTES.
They do not offer, equally, a complete and obvious
support of timing constraints guarantee which is a key
feature in RTES. Additionally, MARTE profile does
not fully support adaptation features for RTES such
as inter-processor tasks migration.
In the present paper, we recall and classify state-
of-the-art approaches around adaptive embedded sys-
tems. While studying these approaches, we concen-
trate on a set of comparison criteria related to de-
sign environment, adaptation process and support of
online temporal and performance analysis. In Sec-
tion 2, we start by defining the considered compari-
son criteria. In section 3, we recall low-level adap-
tation approaches which do not consider a modeling
step. Then, in Section 4, we look through adaptation
approaches based on MDE paradigm. In Section 5,
according to the comparison criteria, we discuss and
compare related works in order to summarize the lim-
its of existing approaches on MDE based design of
adaptive RTES. Then we present our proposed solu-
tion and future works to cope with these limits and al-
low taking the adaptation behavior into account early
in RTES design flow. Finally, we conclude in Section
6.
2 COMPARISON CRITERIA
During our study, we focus on a number of criteria in
which we are interested for our ongoing work. The
first group of criteria relates to the design environ-
ment. We are interested to mention if the approach
is designed at a high level. We are particularly con-
cerned with the UML/MARTE standard which fits our
future works direction (please refer to section 4.1 on
MDE/MARTE). We are also interested in platform
dependency and multiprocessor support criteria. The
second group of criteria is linked to the adaptation
process where we are interested in the modularity of
design and cross-layer adaptation support. We finally
focus on the support of online temporal verification
and performance evaluation.
There is no need to recall the importance and ben-
efits of modularity in complex systems development,
especially in terms of scalability and productivity.
The modular structure of embedded system adapta-
tion process includes:
• Observation: needs to specify resources (ex. CPU
time, network bandwidth or power consumption
observer), trigger events and associated thresh-
olds, and monitoring period.
• Analysis: generates adaptation requests according
to upcoming events. The used analysis test per
constraint has to be defined (such as scheduling
analysis for real time constraint) as well as thresh-
olds to demand adaptation action.
• Decision: needs the specification of a set of adap-
tation strategies and mechanisms, system configu-
rations and selection algorithms to be used to gen-
erate the adaptation solution that best meets the
adaptation requests.
• Action: acts on the system elements to run the
new adaptation solution. It is generally applica-
tion/platform dependent.
• Assessment: required to measure adaptation cost-
effectiveness and make adjustments if needed to
meet the required performances. Metrics have to
be defined, and feedback, estimation and update
techniques need to be settled. Adaptation fre-
quency and granularity, and system stability need
to be considered. Performance models describe
how to measure and interpret application perfor-
mance.
3 LOW-LEVEL ADAPTATION
APPROACHES FOR
EMBEDDED SYSTEMS
There have been numerous contributions to integrate
adaptation strategies in embedded systems develop-
ment process. In the present section, we recall low-
level adaptation approaches in different layers of em-
bedded systems. These approaches do not consider
a modeling step in their development process. We
classify those works in two classes: hardware layer
and software (operating system and application) layer
adaptation.
3.1 Adaptation in the Hardware Layer
We present in the following sub-sections a number
of low-level approaches proposing adaptation tech-
niques which are representative of common state-of-
the-art adaptation techniques.
3.1.1 Power Management Techniques
Portable systems are mostly battery driven and often-
times have to run for considerable time periods. The
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
342

most serious limitation on these devices is the avail-
able battery lifetime. Therefore power management
has become a critical issue for those systems. Di-
verse efforts have been made to improve power man-
agement in mobile devices. Dynamic Voltage scaling
(DVS) (Pillai and Shin, 2001) and Dynamic Power
Management (DPM) techniques have been widely
studied as methods for optimizing the power con-
sumption.
3.1.2 Dynamic Hardware Reconfiguration as a
Key Adaptation Feature
Profiting from technological advances, the current
trends show that dynamically reconfigurable architec-
tures are considered a key element in self adaptive
embedded systems development. Researchers in the
domain have focused their works on the development
of new hardware adaptation techniques taking advan-
tage of dynamic and partial reconfiguration (DPR) ca-
pability offered by modern FPGA (e.g. Xilinx de-
vices). The DPR support enables the system to swap
several designs by reconfiguring co-processors or ac-
celerators at run-time. Such feature is beneficial as it
permits to deal with system optimization at run-time
and improve performance. However, it has a nega-
tive effect on surface and energy consumption. So,
to address area, power and performance trade-offs, a
solution is to decide when and how a running appli-
cation has to be accelerated. In (Ye et al., 2010), au-
thors aim at optimizing multi-processor architecture
through HW resources reconfiguration according to
variable applications’ needs in terms of standard func-
tions. In fact, authors have noticed a prominent use
of common standard functions in embedded systems
such as video/image processing and data encryption.
Their approach is based on a reconfigurable MPSoC
architecture model and libraries of hardware and soft-
ware implementations of intensively used standard
functions. They define a reconfiguration decision al-
gorithm which decides at run-time which configura-
tion best fits with application requirements according
to recorded execution time.
3.2 Adaptation in Software Layers
We classify software adaptation in two categories:
adaptation in the OS layer and application-aware
adaptation.
3.2.1 Adaptation in the OS Layer
The role of the OS in an embedded real-time adap-
tive system is to sense external events, monitor and
allocate scarce resources. Generally, OS adaptation
consists in changing resources allocation or modify-
ing the scheduling policy in response to application
and resource variations. In (Vahdat et al., 2000), CPU
resource managers are defined to provide soft real-
time performance guarantees. In (Banachowski and
Brandt, 2002), schedulers adapt the scheduling policy
to handle the variations of application at runtime. K.
Nahrstedt et al. (Yuan and Nahrstedt, 2006; Chu and
Nahrstedt, 1999) have equally dealt with scheduling
policy adaptation. They have proposed in (Yuan and
Nahrstedt, 2006) an energy-efficient soft real-time
CPU scheduler for multimedia applications running
on a mobile device. The EScheduler seeks to mini-
mize the total energy consumed by the device while
meeting multimedia timing requirements. To achieve
this goal, they integrated the DVS into traditional soft
real-time CPU scheduling: it decides at what CPU
speed to execute applications in addition to when to
execute what applications. EScheduler makes these
scheduling decisions based on the probability distri-
bution of cycle demand of multimedia applications
and obtains their demand distribution via online pro-
filing.
An important allocation adapting technique,
which is increasingly used in modern systems with
multiprocessor architecture, is inter-processor tasks
migration (Goossens et al., 2003). It consists in re-
allocating tasks on execution units following a re-
source variation event. The event can be a work-
load variation due to a task entry or exit event in or-
der to respect timing constraints. This is a classic
problem often encountered and extensively studied in
distributed systems such as web servers or local net-
works. It is however not well tackled in embedded
systems especially in the case of heterogeneous mul-
tiprocessor architectures. Different strategies can be
envisaged. The simplest is to execute the most com-
plex tasks on the most efficient processors. The op-
erating system to be used has to manage processors
heterogeneity issue which presents a significant chal-
lenge when the processors have different instruction
sets.
3.2.2 Adaptation in the Application Layer
Modern applications, specifically multimedia ones,
are becoming more and more complex and have in-
creased computational demands that may exceed ex-
isting embedded systems capacity. Application-aware
adaptation is then an important capability of embed-
ded systems that has been largely tackled in the liter-
ature. Application level adaptation techniques have
been essentially developed for multimedia systems
since they fit very well multimedia applications, such
as H264 and JPEG2000 codecs, which are highly
HighLevelDesignofAdaptiveReal-timeEmbeddedSystems-ASurvey
343

configurable. It is hard to conceive a universal al-
gorithm that can perform well for all kinds of con-
tents. However, if important characteristics of ap-
plications can be identified and utilized to trade-off
output quality for resource usage and user prefer-
ences (ex. Trade-off output video quality for net-
work bandwidth availability), one can design an ad-
justable algorithm that can tune its parameters (algo-
rithms or configuration parameters) to adapt to envi-
ronment variations. This tuning technique has been
widely used in literature (Said et al., 2011) (Mesarina
and Turner, 2003) (Ngoc et al., 2002) (Hsia, 2003)
(Satyanarayanan et al., 1995). Mesarina and Y. pro-
posed in (Mesarina and Turner, 2003) a method to
reduce the energy for a specific multimedia applica-
tion, the «decoding MPEG», using parameter modifi-
cations. Authors in (Ngoc et al., 2002) presents a QoS
framework for interactive 3D applications where the
QoS management relies on high-level QoS parame-
ters (e.g. PSNR) of quality scalable 3D objects. This
framework aims at guaranteeing the user specified in-
teractive frame rate through degrading the 3D objects
quality in such a way that minimal overall quality
degradation over the scene is obtained.
3.3 Cross-layer Adaptation
The above adaptation techniques have been shown to
be effective for both QoS provision and energy sav-
ing. However, most of them adapt only a single layer
or two joint layers. More recently, researchers have
proposed cross-layer adaptation frameworks where
different system layers adaptations are coordinated in
order to fully exploit the adaptation benefits (Yuan
et al., 2006) (Vardhan et al., 2009) (Diguet et al.,
2011) (Loukil et al., 2009). Some of these cross-layer
approaches adapt only at coarse time granularity (Pil-
lai et al., 2003)(Mohapatra and Venkatasubramanian,
2003), e.g., when an application joins or leaves the
system. This infrequent adaptation is proven to be
insufficient to deal with small changes in the system
environment and processed data. Then, some other
cross-layer adaptive frameworks have been proposed
to adapt systems at both coarse and fine time granu-
larities. We present hereafter some recent cross-layer
adaptation approaches.
3.3.1 A Closed Loop Adaptation Approach
J. Philippe et al. have presented in (Diguet et al.,
2011) an OS based adaptation approach for reconfig-
urable embedded systems. The main objective of this
work is the implementation of reconfiguration man-
agers with runtime decision and configuration con-
trol capabilities. As illustrated in Figure 1, a hi-
erarchy of local and global configuration managers
(LCM/GCM) is used to permit the separation between
application-specific and application-independentcon-
figuration decisions. Authors have been interested in
both architectural and algorithmic reconfigurations.
The algorithmic reconfiguration is performed by the
LCM which selects an application-specific algorith-
mic configuration independently of implementation
details. However, the architectural reconfiguration is
in charge of the GCM. It consists in tasks migration
from software to hardware on a multiprocessor het-
erogeneous architecture based on a master GPP pro-
cessor, a specific processor and reconfigurable hard-
ware accelerators. Equally, a RTOS is used for trans-
parent execution of tasks with their different HW and
SW implementations, and the reconfiguration engine
has been implemented as new OS services. A con-
figuration table, which is built at an offline design
space exploration step, contains a set of configura-
tions among which one configuration is selected at
run-time. A configuration is a combination of local
and global parameters which correspond to both al-
gorithmic and architectural (HW/SW tasks partition-
ing) configurations. Three constraints are supposed to
be respected in this work: application QoS, execution
time and power consumption. A simple timer, pro-
vided by the RTOS, is used for tasks execution time
monitoring.
In addition to adaptive behavior integration, this
work is one of the few works that were interested
in studying system stability when self-adapting. Au-
thors define a configuration period equals to Ne ap-
plication iterations in order to minimize control and
reconfiguration overhead. Every period, local and
global managers collect metrics, and then the next
configuration is selected so that the required QoS is
respected and power consumption and execution time
are optimized. This work has nearly covered the dif-
ferent steps required in adaptation process but has the
limitation of being developed at a low level which
makes it difficult to handle and requires a high level
of expertise at hardware implementation. In addition,
Target systems run a static set of tasks and reconfigu-
ration decisions are limited to a pre-characterized set
of configurations which does not fit to modern sys-
tems with dynamic tasks set. Furthermore, the prede-
fined configurations have to be permanently loaded on
the chip which increases static power consumption.
Finally, Altera devices, without dynamic reconfigura-
tion capability, were considered in this work.
3.3.2 GRACE Project
The GRACE project (Global Resource Adaptation
through CoopEration) (Yuan et al., 2006) (Vardhan
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
344
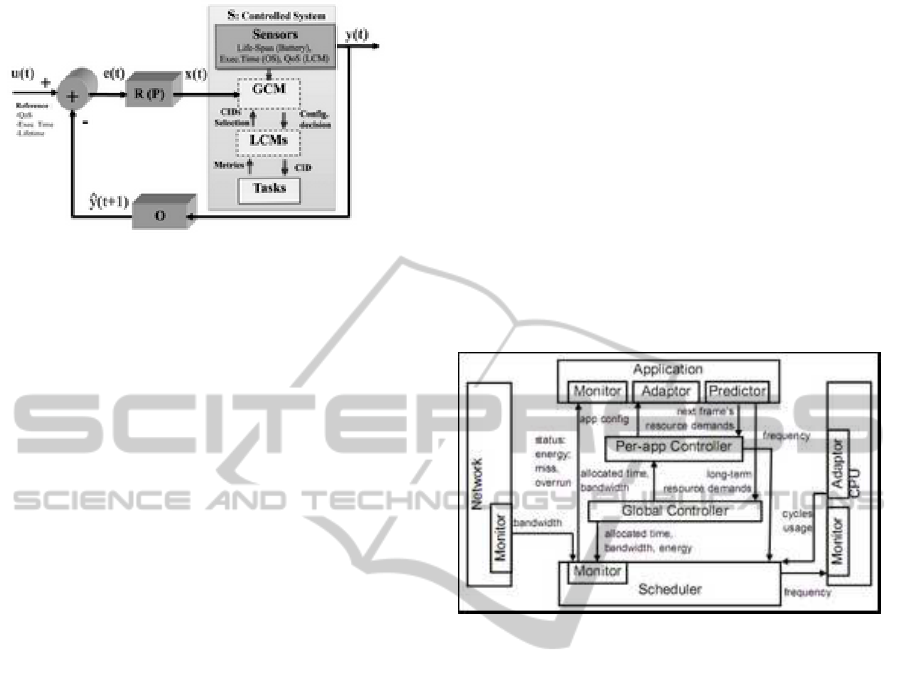
Figure 1: Closed loop adaptive system structure (Diguet
et al., 2011).
et al., 2009) proposes a cross-layer adaptation frame-
work that adapts multiple system layers at multiple
time granularities. It addresses the conflict of adapta-
tion scope and frequency through a hierarchical solu-
tion (c.f.Figure 2) which combines different modules
at different adaptation levels:
• An infrequent expensive global adaptation that
optimizes energy for all applications in the sys-
tem. It only occurs occasionally at large system
changes such as application entry or exit
• A frequent inexpensive limited-scope per-
application adaptation that optimizes for a single
application at a time. It is invoked every frame,
adapting all system layers to the application’s
current demands. An internal adaptation adapts
only a single system layer and may be invoked
several times per application frame.
GRACE’s first generation implementation, called
GRACE-1 (Yuan et al., 2006) coordinates the adap-
tation of the CPU speed in the hardware layer, CPU
scheduling in the OS layer, and multimedia quality in
the application layer, in response to system changes at
both fine and coarse time granularities. It focused also
on the coordination between these cross-layer adapta-
tions in order to reap their full benefit. GRACE-1’s
focus was on cross-layer global adaptation, for which
it showedsignificant energy benefits. It reported a few
experiments with hierarchical adaptation in the CPU
and scheduler, but showed only modest benefits over
global adaptation when running multiple applications.
Later, a second generation prototype, GRACE-2
(Vardhan et al., 2009) was developed to demonstrate
the benefits of the hierarchical adaptation. This pro-
totype implements a global adaptation in the CPU
and application layers, and soft real-time scheduler,
per-app adaptation in both CPU and application lay-
ers, and internal adaptation in the scheduler. It re-
spects the constraints of CPU utilization and network
bandwidth (assumed to be constant), while minimiz-
ing CPU and network transmission energy. GRACE-2
is network-aware. It adds a network bandwidth con-
straint in the global and per-application controller and
considers global and per-application adaptations that
are driven by the tradeoff in CPU time and network
bandwidth usage. It has demonstrated that the lack of
any network awareness results in very modest benefits
from the hierarchical adaptation while running multi-
ple applications. It has also shown that in a network
bandwidth constrained environment, per-app applica-
tion adaptation yields significant energy benefits over
and above global adaptation. This project is very in-
teresting since it has covered almost all system layers.
However, it has been essentially applied to servers
which are not embedded systems and daptation cost
has not been taken into account.
Figure 2: GRACE adaptation structure (Vardhan et al.,
2009).
4 MDE BASED ADAPTATION
APPROACHES
Researches on embedded systems modeling using
MDE approach have begun several years ago and
have shown the gain of using UML/MARTE standard
(Schmidt, 2006) (Dekeyser et al., 2005). However,
those particularly tackling adaptive embedded sys-
tems have recently begun. In the present study, we are
interested on adaptation modeling for embedded sys-
tems using UML/MARTE profile. Currently, most of
state-of-the-art works are focused on modeling hard-
ware level adaptation through system reconfiguration,
but few are interested in software level adaptation, or
furthermore, in cross-layer adaptation modeling. In
the sub-sections below, we present an overview of
the MDE methodology and the MARTE profile, and
then we recall works related to MDE based adaptation
modeling that we classify in hardware and software
levels.
HighLevelDesignofAdaptiveReal-timeEmbeddedSystems-ASurvey
345

4.1 Model Driven Engineering
Overview
Several co-design methodologies shown in literature
prove MDE to be well appropriate to embedded sys-
tems design. The model development process aims at
decreasing the growing complexity of real time sys-
tems as well as the verification of their correctness.
In fact, the abstraction view presented by the model
avoids dealing with details and favorites reusability.
An MDE based methodology starts with a high ab-
straction level and leads to a targeted specific model
through a set of transformations and refinements. The
produced models can be executed to ensure simula-
tion, verification or execution. They can be used for
another objective by being an input to produce other
models.
One variant of MDE is the extension or the restric-
tion of UML views for specific domains. It is pre-
sented through the notion of UML profile. From cur-
rent times, the Object Management Group (OMG) has
voted for a new standard for model driven develop-
ment and analysis of real time systems. The adopted
MARTE (Group, 2011) profile provides mechanisms
to model appropriate specification in order to per-
form specific analysis. In fact, MARTE consists of
three major packages. Foundation Package repre-
sents the foundational concepts for RTES design. It
allows the specification of basic real time concepts
such as non-functional properties (NFPs), time con-
straints and useful resources. The other two pack-
ages are refined from the first one. The second pack-
age named MARTE Design Model is dedicated for
a detailed hardware and software description. As
for the third package, MARTE Analysis Model pack-
age, it offers annotations for generic basis of quanti-
tative performance and schedulability analysis. How-
ever, although it covers a large set of RTES features,
MARTE still lacks concepts for an entire specification
of adaptive RTES, specifically adaptive real-time task
specification and tasks migration for multiprocessor
architectures.
4.2 Hardware Level Adaptation
Modeling
Reconfigurable systems’ modeling is treated by sev-
eral researchers and teams (Rafiq Quadri et al., 2009),
(Rafiq Quadri et al., 2010), (Quadri et al., 2010), (Vi-
dal et al., 2010), (Vidal et al., 2011). A recent project
called FAMOUS (Famous Project, ) is interested in
this topic and involves many partners from research
and industry. It aims at defining a complete design
flow for embedded systems which integrates the dy-
namic reconfiguration of the hardware. We recall in
the subsections below a number of approaches that
have been developed under renowned projects and es-
sentially dealt with dynamic and partial reconfigura-
tion in embedded systems.
4.2.1 Reconfigurability under GASPARD
Framework
Imran et al. proposed in (Rafiq Quadri et al., 2009),
(Rafiq Quadri et al., 2010) a SoC co-design ap-
proach, developed in the GASPARD (Gamatié et al.,
2008) framework, where they integrate control mod-
els based on mode automata to express DPR in mod-
ern FPGA. Xilinx FPGA is the targeted technology.
They present some basic control semantics, such as
Mode Switch Component and State Graphs that are
used in a compositional manner to form mode au-
tomata. Then they propose A UML/MARTE design
flow for automatic RTL code generation to imple-
ment dynamically reconfigurable FPGA. They have
extended the MARTE profile by a set of stereotypes to
model DPR features in Xilinx FPGA. To have a more
complete set of concepts for high level FPGA mod-
eling, they brought, for example, modification to the
HwProcessor stereotype by adding the attribute Im-
plementation_Type to specify wether the processor is
implemented as a hardcore or a softcore IP. Then, to
integrate DPR features, they made modifications to
the HwComponent stereotype such as adding the at-
tribute areatype to specify wether the hardware com-
ponent is a static or dynamically reconfigurable re-
gion or other. They have also defined other exten-
sions to support some Xilinx specific concepts such
as bus macro, which permits routing between static
and reconfigurable regions, the Internal Reconfigura-
tion Access Port (ICAP), which assures the configu-
ration memory read/write at run-time and the Recon-
figurable Hardware Accelerator (RHA). Some con-
trol mechanisms have been added in (Cherif et al.,
2011). A distributed modular reconfiguration con-
troller has been presented. A reconfiguration con-
troller can be defined in differentforms such as a HDL
hardware component or a soft-core processor. It can
also be integrated in different system layers. Here,
the controller has been integrated at the architecture
layer. The complete modeling of a DPR-supported
architecture has been elaborated using the extended
UML/MARTE profile and targeting the Xilinx FPGA
XC2VP30 Virtex-II Pro chip. Model transformations
are applied to move to lower RTL detailed models ar-
riving to automatic code generation of target applica-
tion and the reconfiguration controller.
Although it provides rich extensions of the
MARTE profile to get a more complete support for
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
346
dynamically reconfigurable systems, this methodol-
ogy presents some limitations. First, the proposed
system models only focused on the hardware prop-
erties; the MARTE package that has been most exam-
ined and modified is the Hardware Resource Model
(HRM) package. Second, the approach is linked to
the Gaspard framework, and thus limited to a specific
application domain, that of complex intensive data-
parallel applications. Finally, the work is platform-
dependent. It is based on the Xilinx EAPR (Early Ac-
cess Partial Reconfigurable) design methodology and
proposes DPR models at a low level using Xilinx spe-
cific modules. This demands a high level of expertise
and limits its large adoption in future reconfigurable
architectures.
4.2.2 DPR for MPSoPC under MoPCOM
Project
Another co-design methodology targeting the design
and code generation of dynamically reconfigurable
embedded systems has been developed under the
MoPCOM project (Koudri et al., 2008). Authors
tried to be less target-dependent by hiding technol-
ogy specific details at high level models and allow-
ing their adding at code generation level via a target-
dependent code generation tool. In (Vidal et al., 2010)
authors aim at modeling DPR in case of Multiproces-
sor System on Programmable Chip (MPSoPC). Their
approach is based on run-time reconfiguration of co-
processors connected to embedded processors. They
define the three common Y-chart models, the applica-
tion, architecture and allocation models using stan-
dard UML/MARTE stereotypes. The dynamic re-
configuration behavior is integrated in the allocation
model. Specific stereotypes are used to give recon-
figuration indications for the code generation tool. A
«Reconfig» stereotype with an ID tag are added to ap-
plication components to order the integration of a re-
configuration service in the allocated processor code.
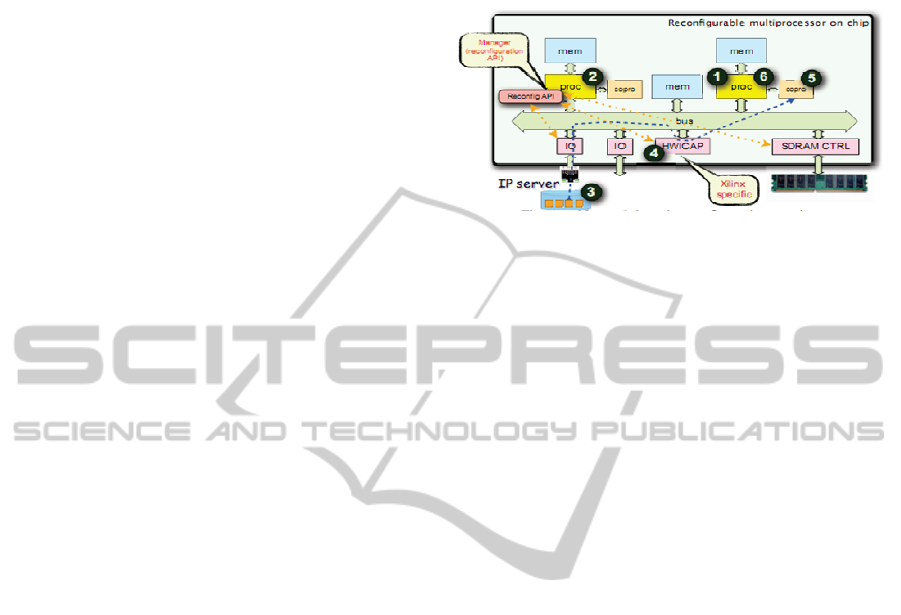
In (Vidal et al., 2011), a component-based mod-
eling methodology is presented. UML/MARTE ele-
ments and some predefined design patterns (Strategy
and state patterns) have been used to reconfigurable
systems. A network based reconfiguration service has
been developed. The proposed reconfigurable MP-
SoPC is illustrated in Figure 3. One of the processors
is identified as a «manager processor» which executes
the reconfiguration API. When a processor wants to
reconfigure its co-processor,it sends a reconfiguration
request to the manager processor. This latter loads the
requested bitstream either from a SDRAM cache or,
if it doesn’t exist locally, from an IP server connected
to the chip through an Ethernet connection. Using
the PlanAhead design and analysis tool, a bitstream
is generated for the initial system configuration and
a set of partial bitstreams are made for each possible
configuration.
Figure 3: Reconfiguration service integration in MPSoPC
(Vidal et al., 2011).
Furthermore, while authors claim to consider real-
time components by using the «RTUnit» stereotype,
they express no special care for the real-time con-
straint. Their allocated model is manually performed,
so it gives no guarantee about the optimality of the
selected solution. A design space exploration step
and a schedulability analysis are thus necessary to
be added in order to fit to modern complex systems
which present dynamic tasks sets with timing con-
straints.
The presented approaches set important basis for
dynamic reconfiguration support in embedded sys-
tems using high level design methodology. How-
ever, in order to efficiently uphold this capability,
some control and decision making mechanisms need
to be considered. These approaches are only inter-
ested in DPR modeling without tackling the adapta-
tion engine which lies behind the reconfiguration de-
cisions such as events, adaptation rules, system moni-
tors, adaptation managers and assessor. Additionally,
the reconfiguration capability is only developed for
the hardware platform. The application behavior is
unchanged and tasks scheduling is static. Further-
more, these works exhibit no support for real-time
constraints and performance evaluation.
4.3 Software-level Adaptation Modeling
We present hereafter two recent works among the
few ones tackling MDE based adaptation modeling
at software level.
A model based approach is provided in (Krichen
et al., 2010) to deal with software reconfiguration in
distributed real-time embedded (DRE) systems with
respect to non-functional properties. Authors started
from the fact that MARTE and AADL standards
present the limitation of permitting dynamic recon-
figuration modeling for RTES by using only static
sets of predefined modes (also called configurations)
HighLevelDesignofAdaptiveReal-timeEmbeddedSystems-ASurvey
347
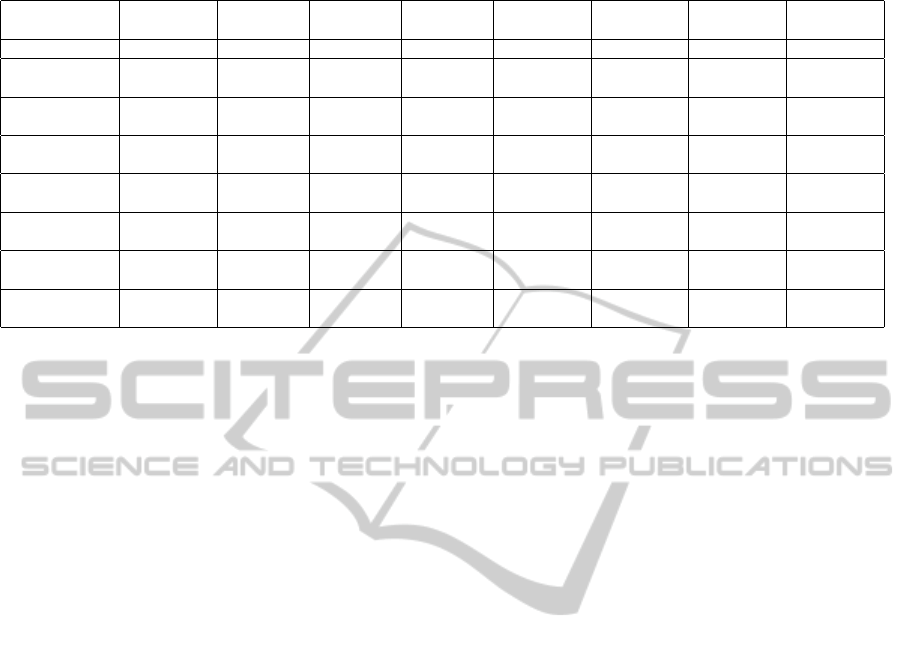
Table 1: Comparison of adaptation approaches for RTES.
UML/MARTE Platform in-
dependent
Multiprocessor Modularity Hw/Sw Adap-
tation
Design-time
verif.
Online time
verif.
Online perfor-
mance eval.
(Ye et al., 2010) * *
(Diguet et al.,
2011)
* * * * *
(Vardhan et al.,
2009)
* * * *
(Rafiq Quadri
et al., 2010)
* *
(Cherif et al.,
2011)
* * *
(Vidal et al.,
2011)
* *
(Krichen et al.,
2010)
* * * *
(Boukhanoufa
et al., 2011)
* * *
and transitions between them. Thus, they proposed
a reconfiguration approach with non-predefined set
of possible configurations by capturing them using
mode structure concept. To describe this concept,
they defined a simple MARTE and AADL inspired
meta-model for reconfigurable software architectures
in RTES which is a combination of model and com-
ponent paradigms. The reconfigurable DRE system
is modeled by a set of mode structures. A transition
between mode structures specifies a reconfiguration
activity which is activated by an event trigger and re-
lated to some constraints. The proposed meta-model
is composed of three packages permitting to define
three adaptation features: the configurationstructures,
the possible events and the reconfiguration activities.
A UML profile for reconfigurable DRE was derived
from this meta-model. This work was enhanced in
(Krichen et al., 2011) by adding a fourth package to
specify Structural and non-functional constraints and
allocation constraints (policies of meta-modes alloca-
tion on execution supports). Another improvement
was added in (Krichen et al., 2012) which consists in
a verification approach for reconfigurable DRE sys-
tems permitting to verify, at design time, a set of
non-functional properties such as CPU usage, mem-
ory and bandwidth usage,tasks deadline meeting, and
deadlock and livelock freedom. They used the RMS
scheduling algorithm, the Cheddar framework and
defined algorithms for verification of the mentioned
properties. This approach adds precious features to
adaptation support using MARTE profile but is only
limited to software modeling. The hardware architec-
ture is considered unchanged. It also lacks support for
online temporal verification and performance evalua-
tion of adaptation.
(Boukhanoufa et al., 2010) (Boukhanoufa et al.,
2011) were also interested in software adaptation
modeling using UML/MARTE. They essentially fo-
cused on the validation of adaptation rules with re-
spect to real-time constraints at design time. A state
machine is used to model the application configura-
tions and transitions between them. Time constraints
verification is performed via a simple comparison be-
tween the worst case execution time of adaptation op-
erations with the application allocated time slot. This
work is among rare researches that have dealt with
timing constraints at model analysis step. However, it
is an off-line step where time constraints verification
is performed on the basis of a set of unchanged timing
properties, which does not fit dynamic systems with
variable input data and resource constraints (variable
execution times and WCET).
5 DISCUSSION
In this section, we present a comparative Table 1
which summarizes related works on adaptive embed-
ded systems and compares them according to the cri-
teria described in section 2. We derive from the pre-
vious study that most of MDE-based adaptation ap-
proaches tackle only hardware level adaptation mod-
eling, essentially dynamic hardware reconfiguration
(Reconfigurable architectures, modes and transitions
modeling), whereas few interests exist in modeling
adaptation at the software level. Cross layer adap-
tation is absent in MDE approaches. Along with this
deficiency, MARTE does not support, among others,
adaptive real-time tasks specification and interproces-
sor tasks migration. We therefore need to add ex-
tensions to MARTE to permit a generic and com-
plete adaptivity features modeling in different system
layers. We need to proceed towards efficient imple-
mentations of adaptive embedded systems through a
well defined design flow which uses a common lan-
guage to avoid misunderstandings between designers,
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
348

and permits the elevation of abstraction level, separa-
tion of functional and extra-functional concerns, and
reusability.
Furthermore, most of existing approaches do not
support the complete process of adaptation for real
time embedded systems and lack modularity. They
present a few interest in temporal properties con-
trol, which present a major constraint in RTES, as
well as performance evaluation. More efforts need
then to be done in the assessment step through tem-
poral and performance analysis models in order to
build more efficient and reliable systems.To the best
of our knowledge, none of existing MDE approaches
jointly dealt with the following features: adaptive
RTES HW/SW modeling, MDE, UML/MARTE pro-
file, modular adaptation process, online temporal ver-
ification and performance analysis. The gathering of
these features in a complete design flow, from high
abstraction level modeling to implementation, sets the
originality of our future works.
6 CONCLUSIONS
According to our study around adaptive embedded
systems, we notice a gap between adaptation tech-
niques development and their utilization in embed-
ded systems. This gap is due to compatibility and
reusability issues and the complexity of integration of
adaptive behavior in increasingly complex systems.
Unfortunately, the limitation of computer aided de-
sign tools addressing adaptive embedded systems de-
sign further widens the gap. To deal with these issues,
specialists in the field have resorted to MDE based
design methodologies. The UML/MARTE profile is
the most upcoming standard for model-driven devel-
opment of embedded systems. It permits to model
the properties of software and hardware parts of a
RTES and the relations between them. It also offers
some extensions such as performance and scheduling
analysis. However, although it offers a large set of
RTES features, MARTE still lacks a full specification
of adaptive RTES.
Our work-in-progress does not consist in propos-
ing a new adaptation approach, but lies in drawing
up a complete design flow that raises the adaptation
RTES development to a high abstraction level, based
on MDE and UML/MARTE standards. Our aim is
to set a generic modeling tool for adaptive RTES
through MARTE extension which (a) permits mod-
els reusability and design complexity decrease and
(b) covers the adaptation process modules, with spe-
cial focus on online temporal verification and perfor-
mance assessment. This approach can then be utilized
by designers who contribute to the embedded systems
adaptation field.
REFERENCES
Banachowski, S. A. and Brandt, S. A. (2002). The best
scheduler for integrated processing of best-effort and
soft real-time processes. In In Proceedings of Multi-
media Computing and Networking 2002 (MMCN Š02,
pages 46–60.
Boukhanoufa, M.-L., Radermacher, A., and Terrier, F.
(2010). Towards a model-driven engineering approach
for developing adaptive real-time embedded systems.
In NOTERE, pages 261–266.
Boukhanoufa, M.-L., Radermacher, A., and Terrier, F.
(2011). Offline validation of real-time application
constraints considering adaptation rules. In Proceed-
ings of the 2011IEEE 10th International Conference
on Trust, Security and Privacy in Computing and
Communications, TRUSTCOM 11, pages 974–980,
Washington, DC, USA. IEEE Computer Society.
Cherif, S., Trabelsi, C., Meftali, S., and Dekeyser, J.-L.
(2011). High level design of adaptive distributed con-
troller for partial dynamic reconfiguration in fpga. In
DASIP, pages 308–315.
Chu, H.-H. and Nahrstedt, K. (1999). Cpu service classes
for multimedia applications. In ICMCS, Vol. 1, pages
296–301.
Dekeyser, J.-L., Boulet, P., Marquet, P., and Meftali, S.
(2005). Model Driven Engineering for SoC Co-
Design. In NEWCAS’05, Quebec, Canada. IEEE.
Diguet, J.-P., Eustache, Y., and Gogniat, G. (2011).
Closed-loop–based self-adaptive hardware/software-
embedded systems: Design methodology and smart
cam case study. ACM Trans. Embed. Comput. Syst.,
10(3):38:1–38:28.
Famous Project. Anr famous overview.
Gamatié, A., Le Beux, S., Piel, É., Etien, A., Ben Atitallah,
R., Marquet, P., and Dekeyser, J.-L. (2008). A Model
Driven Design Framework for High Performance Em-
bedded Systems. Research Report RR-6614, INRIA.
Gogniat, G., Vidal, J., Ye, L., Crenne, J., Guillet, S.,
de Lamotte, F., Diguet, J.-P., and Bomel, P. (2010).
Self-reconfigurable embedded systems: From model-
ing to implementation. In ERSA, pages 84–96.
Goossens, J., Funk, S., and Baruah, S. (2003). Priority-
driven scheduling of periodic task systems on multi-
processors. Real-Time Syst., 25:187–205.
Group, O. O. M. (June 2011). A UML Profile for MARTE:
Modeling and Analysis of Real-Time Embedded sys-
tems, ptc/2011-06-02. Object Management Group.
Hsia, S.-C. (2003). An adaptive video coding control
scheme for real-time mpeg applications. EURASIP J.
Appl. Signal Process., 2003:244–251.
Koudri, A., Vojtsiek, D., Soulard, P., Moy, C., Champeau,
J., Vidal, J., and Le Lann, J.-c. (2008). Using marte
in the mopcom soc/sopc methodology. In workshop
MARTE.
HighLevelDesignofAdaptiveReal-timeEmbeddedSystems-ASurvey
349

Krichen, F., Hamid, B., Zalila, B., and Coulette, B.
(2010). Designing dynamic reconfiguration for dis-
tributed real time embedded systems. In NOTERE,
pages 249–254.
Krichen, F., Hamid, B., Zalila, B., and Jmaiel, M. (2011).
Towards a model-based approach for reconfigurable
dre systems. In ECSA, pages 295–302.
Krichen, F., Hamid, B., Zalila, B., and Jmaiel, M. (2012).
Design-time verification of reconfigurable real-time
embedded systems. In HPCC-ICESS, pages 1487–
1494.
Loukil, K., Amor, N. B., Said, M. B., and Abid, M. (2009).
Os service update for an online adaptive embedded
multimedia system. In ISCC, pages 721–725.
Mesarina, M. and Turner, Y. (2003). Reduced energy decod-
ing of mpeg streams. Multimedia Syst., 9(2):202–213.
Mohapatra, S. and Venkatasubramanian, N. (2003). Parm:
Power aware reconfigurable middleware. In Proceed-
ings of the 23rd International Conference on Dis-
tributed Computing Systems, ICDCS ’03, pages 312–,
Washington, DC, USA. IEEE Computer Society.
Ngoc, N. P., van Raemdonck, W., Lafruit, G., Deconinck,
G., and Lauwereins, R. (2002). A qos framework for
interactive 3d applications. In WSCG, pages 317–324.
Pillai, P., Huang, H., and Shin, K. G. (2003). Energy-aware
quality of service adaptation. Technical report, UNIV.
OF MICHIGAN.
Pillai, P. and Shin, K. G. (2001). Real-time dynamic voltage
scaling for low-power embedded operating systems.
SIGOPS Oper. Syst. Rev., 35(5):89–102.
Quadri, I. R., Meftali, S., and Dekeyser, J.-L. (2010). De-
signing dynamically reconfigurable socs: From uml
marte models to automatic code generation. In DASIP,
pages 68–75.
Rafiq Quadri, I., Meftali, S., and Dekeyser, J.-L. (2009).
A Model based design flow for Dynamic Reconfig-
urable FPGAs. International Journal of Reconfig-
urable Computing.
Rafiq Quadri, I., Yu, H., Gamatié, A., Rutten, E., Meftali,
S., and Dekeyser, J.-L. (2010). Targeting Reconfig-
urable FPGA based SoCs using the MARTE UML
profile: from high abstraction levels to code genera-
tion. Special Issue on Reconfigurable and Multicore
Embedded Systems, International Journal of Embed-
ded Systems (IJES).
Said, M. B., Amor, N. B., Taher, F. B., Diguet, J. P., and
Abid, M. (7-9 April 2011). A bi-constraints adapta-
tion technique for embedded multimedia systems. In
International Conference on Multimedia Computing
and Systems (ICMCS), 2011, pages 1 – 6.
Satyanarayanan, M., Noble, B., Kumar, P., and Price, M.
(1995). Application-aware adaptation for mobile com-
puting. SIGOPS Oper. Syst. Rev., 29(1):52–55.
Schmidt, D. C. (2006). Model-driven engineering. IEEE
Computer, 39(2).
Vahdat, A., Lebeck, A., and Ellis, C. S. (2000). Every joule
is precious: the case for revisiting operating system
design for energy efficiency. In EW 9: Proceedings of
the 9th workshop on ACM SIGOPS European work-
shop, pages 31–36, New York, NY, USA. ACM Press.
Vardhan, V., Yuan, W., III, A. F. H., Adve, S. V., Kravets, R.,
Nahrstedt, K., Sachs, D. G., and Jones, D. L. (2009).
Grace-2: integrating fine-grained application adapta-
tion with global adaptation for saving energy. IJES,
pages 152–169.
Vidal, J., de Lamotte, F., Gogniat, G., Diguet, J.-P., and
Guillet, S. (2011). Dynamic applications on recon-
figurable systems: From uml model design to fpgas
implementation. In DATE, pages 1208–1211.
Vidal, J., de Lamotte, F., Gogniat, G., Diguet, J.-P., and
Soulard, P. (2010). Uml design for dynamically re-
configurable multiprocessor embedded systems. In
Proceedings of the Conference on Design, Automation
and Test in Europe, DATE 10, pages 1195–1200, 3001
Leuven, Belgium, Belgium. European Design and Au-
tomation Association.
Ye, L., Diguet, J.-P., and Gogniat, G. (2010). Rapid appli-
cation development on multi-processor reconfigurable
systems. In FPL, pages 285–290.
Yuan, W. and Nahrstedt, K. (2006). Energy-efficient cpu
scheduling for multimedia applications. ACM Trans.
Comput. Syst., 24(3):292–331.
Yuan, W., Nahrstedt, K., Adve, S. V., Jones, D. L., and
Kravets, R. H. (2006). Grace-1: Cross-layer adapta-
tion for multimedia quality and battery energy. IEEE
Transactions on Mobile Computing, 5(7):799–815.
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
350
