
Automated Throughput Optimization of Cloud Services via
Model-driven Adaptation
Javier Troya, Javier Cubo, Jos
´
e Antonio Mart
´
ın, Ernesto Pimentel and Antonio Vallecillo
Department of Computer Science, University of M
´
alaga, M
´
alaga, Spain
Keywords:
Model-driven Engineering, DSVL, QoS Adaptation, Throughput Optimization, Cloud Service Provisioning.
Abstract:
Cloud computing promises easy access, low entry cost and elasticity. However, elastic service provisioning
is usually delivered via service replication, which must be supervised manually, hand-picking the services
to replicate and ensuring their proper load balance. Automated service provisioning, i.e., the function of
automatically scaling the services to cope up with their runtime demand, is a research challenge in cloud
computing. In this work, we include such scalability analysis early in its development cycle, right at the design
stage. We propose a model-driven approach where various QoS parameters can be simulated and analyzed
using the e-Motions tool. Additionally, the model is automatically transformed to fit the given throughput
requirements by replicating the services which cause the bottleneck. In order to evaluate the proposal, we
present some initial experimental results run over the e-Motions tool.
1 INTRODUCTION
Cloud computing promises low entry cost and elastic
scalability. The service provider pays for the amount of
resources consumed by its services, and thus this elas-
ticity allows to have fewer or more service instances
(properly balanced) depending on the current demand.
However, elastic scalability is usually delivered by
easily replicating service instances, what must be su-
pervised manually (Expert Group Report, European
Commission, 2010). Automated service provision-
ing (Zhang et al., 2010) is a research challenge in
cloud computing.
In this ongoing work, we present an approach to
include the scalability analysis of our system early in
its development cycle, right at the design stage. Specif-
ically, we propose a model-driven approach where var-
ious Quality-of-Service (QoS) parameters can be sim-
ulated and analyzed using the e-Motions tool (Rivera
et al., 2009a; Troya et al., 2013). Additionally, the
model is automatically transformed to fit the given
throughput requirements. This is done by analyzing
the services which pose the bottleneck of our system,
replicating them and balancing the load of the work-
flow while minimizing their cost at the same time.
The main contributions of our approach are i) to in-
clude QoS requirements in the model of the cloud
system using a Domain-Specific Visual Language
(DSVL), ii) to be able to simulate their performance
at design time, and iii) to automatically devise replica-
tion strategies in order to fulfill the throughput require-
ments.
We illustrate our approach with a model of a work-
flow which spans over several cloud services in 2. The
initial design of this choreography cannot handle the
tight throughput requirements. Instead, this is sim-
ulated and analyzed by the QoS observers placed in
the model. And, using the simulated values, model-
transformation rules are automatically applied to repli-
cate the least performing services, effectively adapt-
ing the system to finally fulfill the throughput require-
ments. In 3, we briefly describe related work which
support our approach. We conclude this work with
some final remarks in 4.
2 APPROACH
In this section, we present a Model-Driven Engineer-
ing (MDE) approach for the definition of a Domain-
Specific Visual Language (DSVL) to describe cloud
infrastructures. Such DSVL is able to model both func-
tional and non-functional properties. Furthermore, it
may self-adapt in terms of elastic scalability by repli-
cating service instances, in order to satisfy the desired
non-functional requirements.
356
Troya J., Cubo J., Antonio Martín J., Pimentel E. and Vallecillo A..
Automated Throughput Optimization of Cloud Services via Model-driven Adaptation.
DOI: 10.5220/0004381903560362
In Proceedings of the 1st International Conference on Model-Driven Engineering and Software Development (MODA-2013), pages 356-362
ISBN: 978-989-8565-42-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
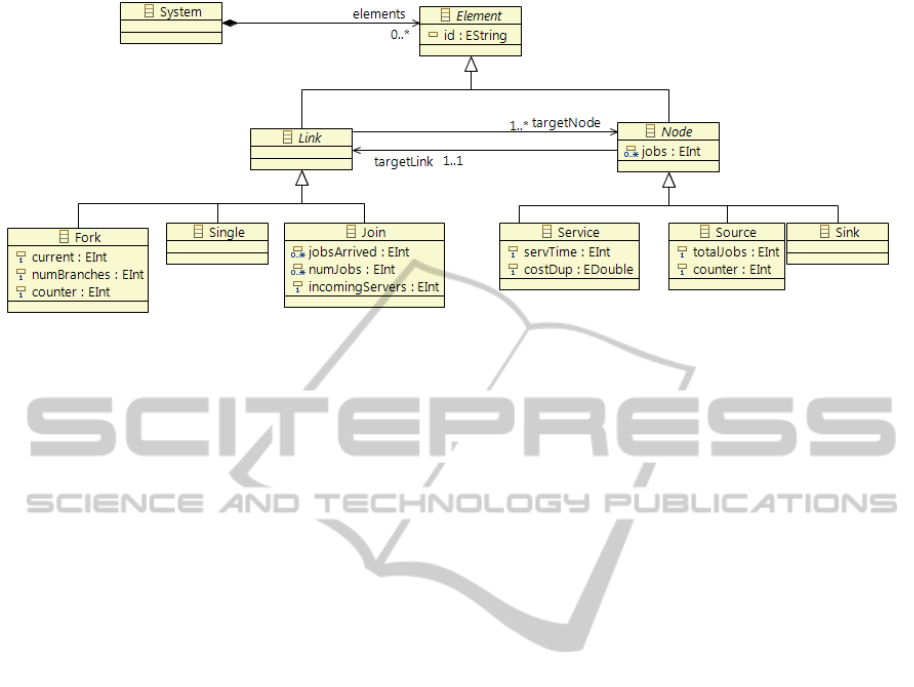
Figure 1: Metamodel of a cloud system.
2.1 Defining Cloud Infrastructures with
DSVL
In MDE, any domain-specific language is defined in
terms of its abstract and concrete syntaxes, and of its
semantics.
2.1.1 Abstract and Concrete Syntaxes
The abstract syntax describes the static structure and
it is defined by means of the metamodel shown in 1.
A System is composed by a set of Elements, which
can be either Links or Nodes. The latter represent the
Services of the cloud systems, and also those entities
that start the data flow (Source) and those where the
data eventually arrives or is consumed (Sink). Services
count the number of jobs they serve, and they have
information about their service time and the cost of the
service (which is also the cost of duplicating it). As for
Links, they can be of three types, Fork, Single and Join.
Fork links are used to split a job into many, Single links
transmit jobs between two Nodes, and Join links are
used to combine several jobs into a single one.
A model conforming to this metamodel is shown
in 2. It is the initial model used in the case study we
use to illustrate our approach. Our case study models a
geolocation, photographic service, where the input of
the system (the source src) provides a constant stream
of geolocalized pictures. These pictures are then sent
in parallel to services s1, which provides the map of
their location, and s2, which escalates the pictures to
an appropriate size and resolution. The resized pictures
are then processed by service s3 which applies some
image filters. The results coming from s1 and s3 are
finally combined and ready to be stored or delivered
by the sink (snk) of the system.
The concrete syntax chosen for our model can be
seen in 2. It consists of a visual icon assigned to every
non-abstract class. The objects with glasses represent
our observers, and they are used to record the non-
functional properties of the system. In order to be
able to introduce them in the models, they need to be
defined. As the system, they are defined by means of a
metamodel, the one shown in 3. Then, this metamodel
is merged together with the system metamodel, so
that observer objects can be included in the system
specifications.
An observer is an object whose purpose is to mon-
itor the state of the system: the state of the objects,
of the actions, or both. Observers, as any other ob-
jects, have a state and a well-defined behavior. The
attributes of the observers capture their state, and are
used to store the variables that we want to monitor.
There are two types of observers: individual and gen-
eral. The former are used to monitor specific objects
in the system, while the latter are used to monitor prop-
erties of the system as a whole. In our case study,
individual observers are aimed at monitoring both the
percentage of the time that the monitored service is
busy (TimeBusyOb observer) and the evolution in the
cost of a service (CostOb observer), considering it
can be replicated. The general observers measure the
throughput of the system (ThroughputOb observer)
and control the logic that deals with the replication of
services in each iteration (ControllerOb observer).
2.1.2 Semantics
One way of specifying the dynamic behavior of a
DSVL is by describing the evolution of the modeled
artifacts along some time model. In MDE, this can be
done using model transformations supporting in-place
update (Czarnecki and Helsen, 2003). The behavior of
the DSVL is then specified in terms of the permitted ac-
tions, which are in turn modeled by the transformation
rules.
AutomatedThroughputOptimizationofCloudServicesviaModel-drivenAdaptation
357
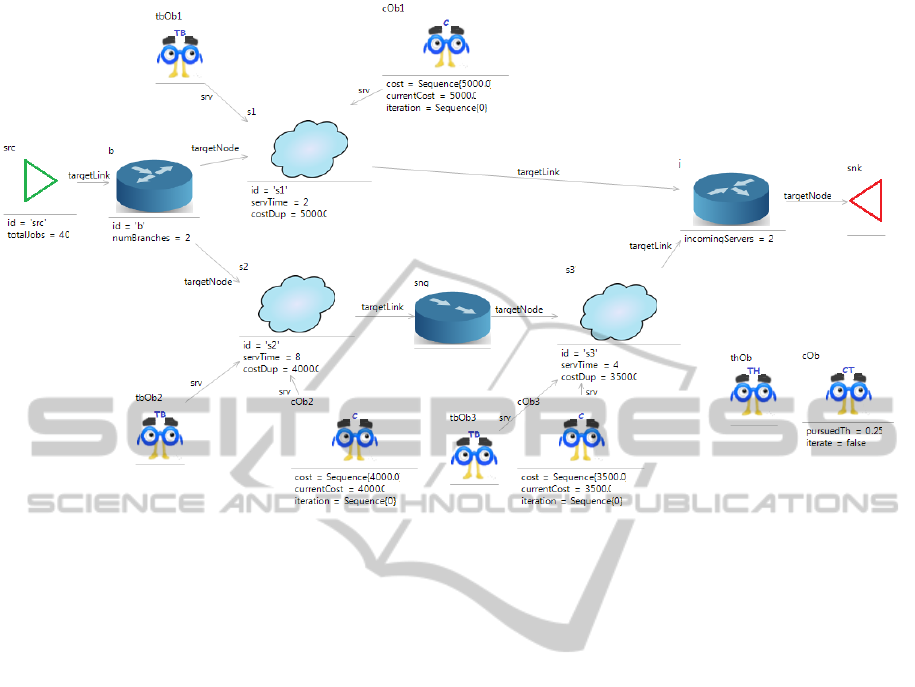
Figure 2: Initial model of our case study.
There are several approaches that propose in-place
model transformations to deal with the behavior of a
DSVL, from textual to graphical (see (Rivera et al.,
2008) for a brief survey). Our approach provides a very
intuitive way to specify behavioral semantics, close to
the language of the domain expert and the right level
of abstraction (de Lara and Vangheluwe, 2008).
In-place transformations are composed of a set
of rules, each of which represents a possible ac-
tion of the system. These rules are of the form
l : [NAC]
∗
× LHS → RHS
, where
l
is the rule’s label
(its name); and LHS (Left-Hand Side), RHS (Right-
Hand Side), and NAC (negative application conditions)
are model patterns that represent certain (sub-)states
of the system. The LHS and NAC patterns express the
precondition for the rule to be applied, whereas the
RHS one represents its postcondition, i.e., the effect of
the corresponding action. Thus, a rule can be applied,
i.e., triggered, if an occurrence (or match) of the LHS
is found in the model and none of its NAC patterns
occurs.
Generally, if several matches are found, one of
them is non-deterministically selected and applied, pro-
ducing a new model where the match is substituted by
the appropriate instantiation of its RHS pattern (the
rule’s realization). The model transformation proceeds
by applying the rules in a non-deterministic order, un-
til none is applicable — although this behavior can be
usually modified by some execution control mecha-
nism (Rivera et al., 2009c).
In (Rivera et al., 2009b), the authors showed how
time-related attributes can be added to rules to repre-
sent features like duration, periodicity, etc. Moreover,
they also included the explicit representation of action
executions, which describe actions currently execut-
ing.
There are two types of rules to specify time-
dependent behavior, namely, atomic and ongoing rules.
Atomic rules represent atomic actions, with a specific
duration. They can be cancelled, but cannot be inter-
rupted. Ongoing rules represent interruptible continu-
ous actions. Atomic rules can be periodic, and atomic
and ongoing rules can be scheduled, or be given an
execution interval, by the lower and upper bounds of
the rules.
A special kind of object, named Clock, represents
the current global time elapse. This allows designers
to use it in their timed rules.
The semantics of our system are specified by means
of a set of behavioral rules that model the permitted
actions in the system. Examples of such rules are
shown in Figures 4(a) and 4(b), which model how a
job is sent from a service to many services through a
fork link. Two rules are used to model this.
In the first rule, Service-Fork, the job is forwarded
from the service to the link connected to it. The con-
dition in the LHS, written in the Object Constraint
Language (OCL), checks that the service contains at
least a job and that the counter of the link is set to
0
. This counter attribute is used by the link to subse-
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
358
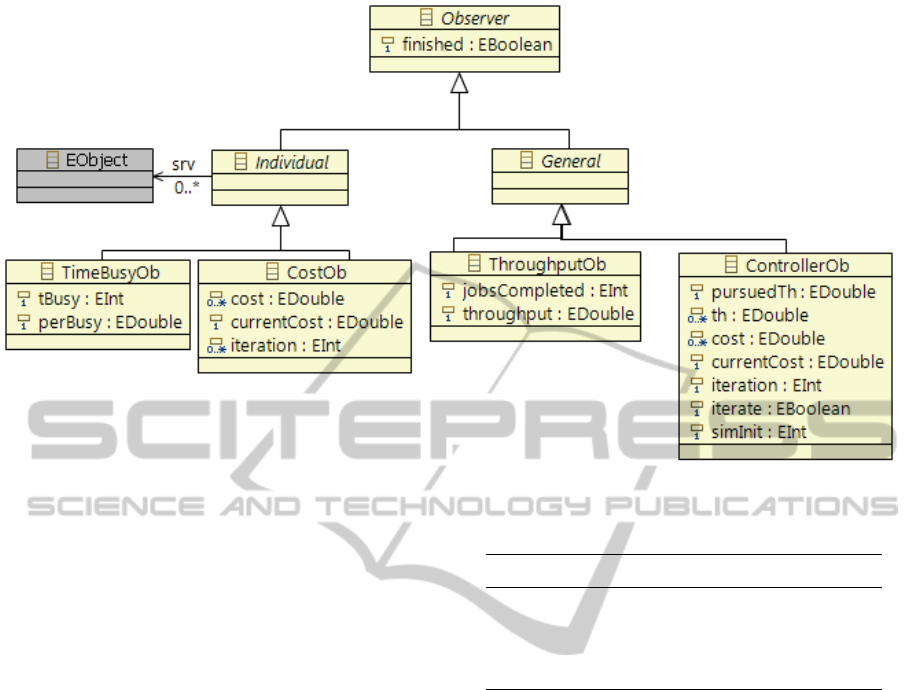
Figure 3: Observers metamodel.
quently send the job to all its outgoing services. In
the rule’s RHS, the job is removed from the service
and placed in the link, and the number of outgoing
services is given to the counter attribute of the link.
The TimeBusyOb observer associated to the service
is updated with the addition of the time consumed by
this rule, which is the service time of the service.
The other rule, Fork-Services, models the second
part of this process. The OCL condition in the LHS
checks that the job is not already within the service
doing the matching and that the link’s counter is bigger
than 0 (modeling that there are still services to which
the job must be sent). In the RHS, the counter value
is decreased and the job is added to the service’s jobs.
This rule is instantaneous (its duration is
0
), since it has
been added to model the logic of the fork links. Similar
rule have been defined for single and join links. The
complete set of behavioral rules is shown in (Atenea,
2012).
2.2 Simulation and Model
Transformation
Once we have the cloud application modeled using
our DSVL, we are ready to perform simulations and
check how the system auto-scales in order to satisfy
a required level of throughput. Since the observers
are objects included in the system, we simply have to
check the value of their attributes after the simulation
in order to see the performance measures and how
the system has evolved and self-adapted. The whole
approach is implemented in the e-Motions tool (Rivera
Table 1: Evolution of the throughput and the system.
Iteration Throughput Service Cost
0 0.12 – 12500
1 0.24 s2 16500
2 0.24 s3 20000
3 0.48 s2 24000
et al., 2009a), which runs as an Eclipse plugin and
executes the model transformation rules by encoding
them as rewriting rules over Maude.
The auto-scaling criteria in our approach is intu-
itively explained as follows. If the observed through-
put is lower than the expected value, then the service
with the slower service time is duplicated. If there are
more than one service with the same service time, then
it duplicates the cheapest.
In our case study (see the model in 2), it was re-
quired a minimum throughput of
0.25
jobs per time
slot. Table 1 presents, for each iteration in our model,
the throughput and cost of the system, and the service
that was duplicated from the previous iteration. In
each iteration, a fixed number (
40
in our case) of pack-
ets are sent from the source to the sink, after which
the QoS properties are calculated. If the throughput
constraint is not satisfied, the system auto-scales and a
new iteration is launched automatically.
We can see that the initial cost of the services was
12500
. The simulation of the original version of the
model (2) obtained a throughput of
0.12
. Then the
model is transformed so as to duplicate the number
of instances of the least performing service (service
AutomatedThroughputOptimizationofCloudServicesviaModel-drivenAdaptation
359
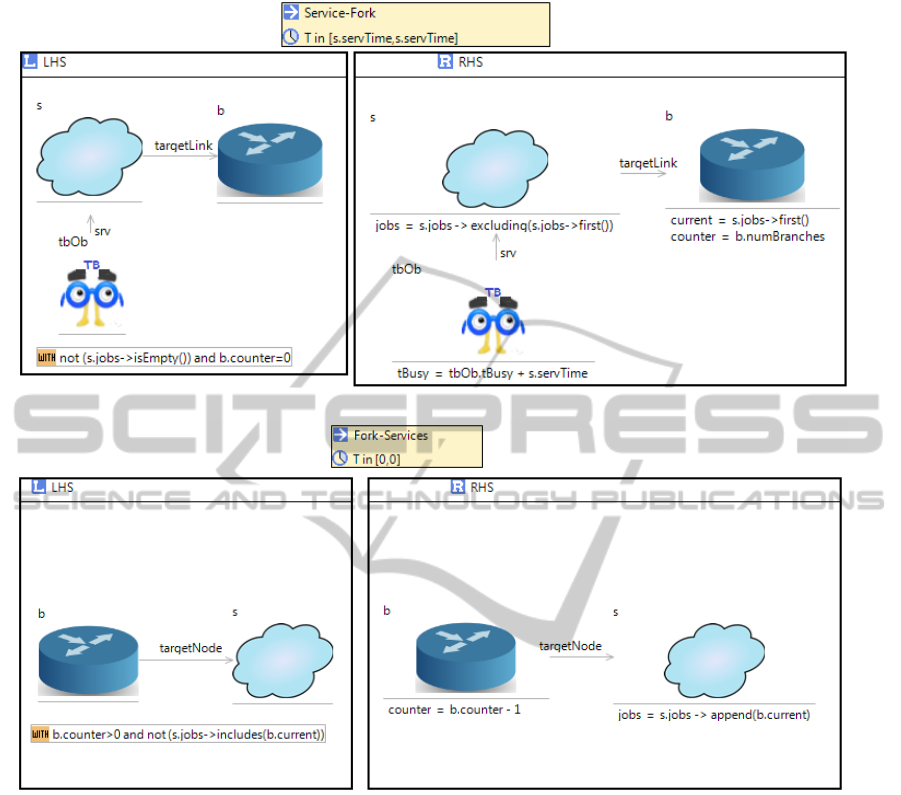
(a) Service-Fork rule
(b) Fork-Services rule
Figure 4: Rules for sending a job through a fork link.
s2) in iteration
1
. This increased the cost of the whole
system to a total of
16500
and the resulting through-
put increased to
0.24
. After iteration
1
, we have two
instances of service s2 and one of s3. Consequently,
the service time of both is now the same:
4
(recall
that the service time in service s1 is
2
, see 2, so it is
not considered for duplication). However, duplicating
service s3 is cheaper. For this reason, s3 is duplicated
after iteration
1
, so the cost of the system increases to
20000
, but the throughput remains as
0.24
. The reason
why this value remains the same is that services s2 and
s3 are connected in series. Thus, if one service is faster
than the other, a bottleneck is caused in the latter, and
viceversa. So, in order to avoid this local bottleneck,
both services should have the same service time. After
iteration
3
, the system automatically duplicates service
s2, achieving a final throughput of
0.49
and with a
total cost of 24000.
3 RELATED WORK
In this section, we comment on related work in two
dimensions: (i) adaptation of QoS, and (ii) model-
driven simulation.
There are several efforts towards QoS adaptation of
cloud-based systems (Stantchev and Schr
¨
opfer, 2009;
Cao et al., 2009; Calheiros et al., 2011). Specifically,
in (Stantchev and Schr
¨
opfer, 2009) the authors propose
an approach to negotiate, monitor and enforce Service-
Level-Agreements (SLAs) when the infrastructure is
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
360

not owned by the controller of the system. Their work
is applicable to cloud and grid computing scenarios.
They promote the replication of services as an effective
way to boost performance and dependability, but they
achieve this via predefined replication strategies. Our
approach, however, is able to generate such strategies
automatically based on a simulation of the system and
its performance.
OPTIMIS (Ana Juan Ferrer et al., 2012) is a holis-
tic approach which enables flexible and dynamic pro-
visioning of cloud services, based on adaptive self-
preservation. This mechanism is a key to meet pre-
dicted and unforeseen changes in resource requirement.
This approach deserves further consideration once the
tools are delivered. Our work is less ambitious than
theirs but, nonetheless, our contribution towards the
simulation and analysis of various QoS parameters,
including automatic model transformation to fit the
given throughput requirements, will complement other
solutions for elastic service provisioning.
As regards model-driven simulation efforts,
ARENA (Rockwell Automation, 2011) offers simi-
lar analysis tools where the model can be visually
simulated in a MDE fashion. However, they use their
proprietary notations and therefore it cannot be ex-
tended with its own DSVLs. Our approach, based in
e-Motions, supports the creation of new metamodels
and their domain-specific visual notation. Addition-
ally, we provide transformation rules which refine the
model so as to fulfill the throughput requirements.
The observers used in our approach are reminiscent
of those used in the MARTE (OMG, 2008) specifica-
tion. The advantage of including these observers into
a DSVL (as it is done in our approach) is that we
were able to i) make explicit the throughput require-
ments in the specification, ii) simulate and reason over
the model, and iii) automatically transform the model
according to the information extracted via these ob-
servers. This is not possible with MARTE observers.
4 CONCLUSIONS AND
PERSPECTIVES
In this ongoing work, we have presented an approach
to tackle automatic service provisioning via service
replication and supported by a DSVL. We proposed to
include the scalability analysis at the design stage. Our
proposal is based on model-driven adaptation mecha-
nism, where various QoS parameters can be simulated
and analyzed using the e-Motions tool. Furthermore,
with the purpose of fulfilling the required throughput,
we have made the system to automatically transform
by replicating and load-balancing the services which
cause the bottleneck.
Our approach has been evaluated with a concrete
case study of cloud services. We obtained promising
results since the tool was able to automatically refine
the initial models so as to fit the throughput require-
ments.
As regards future work, we are moving on to ex-
plicitly include the concept of load-balancer in our
model, to analyze in detail its impact on the perfor-
mance of the system, and to finally implement the
resulting model and the transformation rules in the
clouds.
In addition, although our approach is to replicate
services as a mean to address service provisioning, we
perform the scalability analysis at the design stage, and
thus we do not address dynamic adaptation. However,
we plan to study and compare other strategies such as
adaptive self-preservation or dynamic reconfiguration
of Virtual Machines.
ACKNOWLEDGEMENTS
This work has been partially supported by the projects
TIN2008-05932 (ReSCUE), TIN2008-031087,
TIN2011-23795 and TIN2012-35669 (SOFIA), all
funded by the Spanish Ministry of Science and
Innovation and FEDER, and the project P11-TIC-7659
funded by the Andalusian Government.
REFERENCES
Ana Juan Ferrer et al. (2012). Optimis: A holistic ap-
proach to cloud service provisioning. Future Gen-
eration Comp. Syst., 28(1):66–77.
Atenea (2012). Modeling of Cloud System Infrastruc-
tures. http://atenea.lcc.uma.es/index.php/Main Page/
Resources/E-motions/Cloud.
Calheiros, R., Ranjan, R., and Buyya, R. (2011). Virtual
machine provisioning based on analytical performance
and QoS in cloud computing environments. In Proc. of
ICPP, pages 295–304.
Cao, B.-Q., Li, B., and Xia, Q.-M. (2009). A service-oriented
qos-assured and multi-agent cloud computing architec-
ture. In Jaatun, M., Zhao, G., and Rong, C., editors,
Cloud Computing, volume 5931 of LNCS, pages 644–
649. Springer.
Czarnecki, K. and Helsen, S. (2003). Classification of model
transformation approaches. In OOPSLA’03 Workshop
on Generative Techniques in the Context of MDA.
de Lara, J. and Vangheluwe, H. (2008). Translating model
simulators to analysis models. In Proc. of FASE 2008,
number 4961, pages 77–92. Springer.
Expert Group Report, European Commission (2010). The
future of cloud computing - opportunities for european
AutomatedThroughputOptimizationofCloudServicesviaModel-drivenAdaptation
361

cloud computing beyond 2010. http://cordis.europa.eu/
fp7/ict/ssai/docs/cloud-report-final.pdf.
OMG (2008). A UML profile for MARTE: Modeling and
analyzing real-time and embedded systems. Technical
report, OMG.
Rivera, J., Dur
´
an, F., and Vallecillo, A. (2009a). A graphi-
cal approach for modeling timedependent behavior of
DSLs. In In Proc. of VLHCC’09.
Rivera, J. E., Dur
´
an, F., and Vallecillo, A. (2009b). A graphi-
cal approach for modeling time-dependent behavior of
dsls. In Proc. of the IEEE Symposium on Visual Lan-
guages and Human-Centric Computing (VL/HCC’09),
Corvallis, Oregon (US). IEEE Computer Society.
Rivera, J. E., Guerra, E., de Lara, J., and Vallecillo, A. (2008).
Analyzing rule-based behavioral semantics of visual
modeling languages with Maude. In Proc. of SLE’08,
number 5452, pages 54–73, Tolouse, France. Springer.
Rivera, J. E., Vallecillo, A., and Dur
´
an, F. (To appear in
2009c). Formal specification and analysis of domain
specific languages using Maude. Simulation: Trans-
actions of the Society for Modeling and Simulation
International.
Rockwell Automation (2011). Arena simulation software.
Available at: http://www.arenasimulation.com/ Last
checked: Dic. 2012.
Stantchev, V. and Schr
¨
opfer, C. (2009). Negotiating and
enforcing qos and slas in grid and cloud computing.
In Proceedings of the 4th International Conference on
Advances in Grid and Pervasive Computing, GPC ’09,
pages 25–35, Berlin, Heidelberg. Springer-Verlag.
Troya, J., Vallecillo, A., Dur
´
an, F., and Zschaler, S. (2013).
Model-driven performance analysis of rule-based do-
main specific visual models. Information and Software
Technology, 55(1):88 – 110.
Zhang, Q., Cheng, L., and Boutaba, R. (2010). Cloud com-
puting: state-of-the-art and research challenges. Jour-
nal of Internet Services and Applications, 1:7–18.
MODELSWARD2013-InternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
362
