
Mixing Reality and Virtual Worlds in an Educational Mobile
Robotics Remote Lab
Riccardo Cassinis
Department of Information Engineering, University of Brescia, Via Branze 38, I-25123 Brescia, Italy
Keywords: Educational Robotics, Remote Labs, Augmented Reality, Internet-based Teaching.
Abstract: This paper describes MOBOLAB, a project aimed at the construction of a remotely controlled mobile
robotics laboratory. MOBOLAB was primarily designed to aid educators who wish to use robotics as an
educational tool for pupils ranging from elementary to high school, and who don’t have educational robotic
equipment readily available at their place, or who wish to use a standardized environment offering several
useful features to enhance their teaching activity. MOBOLAB also offers other interesting usage
possibilities, such as on-line training of educators, student robotic competitions, etc.
Although far from being complete (in fact, MOBOLAB was designed as an ever-expanding project), some
interesting results have already been obtained from practical experiments performed with pupils and
educators.
1 INTRODUCTION
During the last few years the importance of robotics,
especially mobile robotics, at all levels of education
has become unquestionable (Johnson, 2003). Robots
are being used to teach not only the principles of
robotics, but also a variety of concepts and notions
spanning completely different areas, such as
computer programming, geography, mathematics,
etc.
The goals that can be achieved using mobile
robots in the classroom are multiple, and have been
discussed by several authors; they range from the
understanding of what a mobile robot is and what
problems it has to face in the real world (perhaps
comparing them with the more structured world in
which industrial manipulators operate), to the basic
principles of programming (Seymour Papert’s Logo
(Papert, 2005) was a great precursor in this field), to
a quite amusing and unpredictable teaching aid for
other subjects, such as geography or math, if the
robot is wandering over a map or a table that bears
right and wrong solutions for a given problem.
It often happens however that schools are not
equipped with robotic laboratories, and educators are
not yet used to robots and require specific training.
Investing in robotics equipment, especially in small
schools, is often unaffordable or at least
economically un-convenient.
On the other hand, remote real and virtual labs
that can be accessed via the Internet have become
very popular in several fields, including robotics.
They offer a standard environment, possibly
including also sophisticated equipment, at a very
low cost given the scale factor (a single lab can be
used to satisfy the needs of several schools). On the
user side, they require standard devices—actually, a
PC and an Internet connection usually are all that is
required to start—that are already available in most
cases.
2 THE PROBLEM
Virtual and remotely accessible labs are not new, not
even in the field of robotics (Khamis et al., 2003).
However, due to several reasons, most of the
existing robotics laboratories are related to
manipulation, rather than to mobile robotics.
Furthermore, they are often aimed at high school
or college students, while the system described here
is specifically targeted to younger pupils (up to an
age of about 15 years) and to their teachers.
A distinction should be made between virtual
and physical labs. The former serve data from a
computer simulator of the system to be
studied. Some of these systems offer very
sophisticated services, as the MIND Project
148
Cassinis R..
Mixing Reality and Virtual Worlds in an Educational Mobile Robotics Remote Lab.
DOI: 10.5220/0004390001480153
In Proceedings of the 5th International Conference on Computer Supported Education (CSEDU-2013), pages 148-153
ISBN: 978-989-8565-53-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

(http://www.mind.ilstu.edu). Anyway, in most cases,
it is useless to resort to a remote simulator, since a
local one can be used, unless high computing power
is required. The only reason for using a remote
simulator is when people located far from each other
must work together or compete. This happens for
instance in computer simulated games as the
simulated soccer league of Robocup (Kitano et al.,
1997).
Examining the pro’s and con’s of mobile robot
simulators is not in the scope of this paper, but it can
be said that, in general, they don’t give users,
specially the younger ones, the feeling of something
physical really happening somewhere in the world.
Users tend to quickly lose interest and the
educational result is quite poor.
Most remote labs, on the other hand, are devoted
to experiments where some physical device or
measuring instrument is connected to a computer. In
this case, “localizing” the experiment would require
the acquisition of (often expensive) instruments.
Commands issued by the person performing the
experiment and measured data are directly
transmitted through a computer, and this requires
quite a simple procedure to provide the user with a
suitable interface. In other words, the connection
between the user and the real world takes place in
the form of well-standardized methods and
protocols.
Remote robotics labs, on the other hand, have
different requirements. This is because the robot
physically interacts with the real world through non-
standardized, poorly modeled interfaces (the gripper
in the case of a manipulator arm, wheels or legs in a
mobile robot). The effects of a user-initiated action
cannot in general be anticipated, and in most cases
not even measured. This poses at least two
additional requirements:
a) The user must be able to see, and often also to
hear what is happening in the lab;
b) The lab must be capable of automatically
returning to a known initial state, no matter how
wrong the received commands were.
The above requirements are quite hard to meet
when manipulators are involved, and usually require
that some human assistance be available at the lab
site. In the field of mobile robots instead, they can
be more easily met if the environment and the robots
are simple and carefully designed in order to avoid
entanglements, robots capsizing and other major
accidents.
Additionally, mobile robots need some means for
recharging themselves when they are not being used.
The recharging procedure should be fully automatic.
As it was said, the alternate choice of using
software simulators doesn’t seem to be very
appealing, because simulators cannot fully replicate
the real world and their users are often unsatisfied
and get quickly bored (Tzafestas et al., 2006). On
the other hand, the real robots, even if at a remote
location, are much more appealing especially to
younger people, and obviously perform in a more
realistic way.
A number of very interesting and inspiring
realizations in this field is already available
(Guimaraes et al., 2003), (Casini et al., 2008),
(Casini et al., 2009), (Casini et al., 2011): however,
the project described here has some original
characteristics such as the capability of being
remotely controlled and programmed in different
ways to accommodate the needs of different users,
and the use of some augmented reality to enhance
the performance of the whole system.
3 DEFINING PERFORMANCE
LAYERS AND SERVICES
As it was said, MOBOLAB project is targeted to the
needs of different users: students of various grades
on one side, educators on the other. It must therefore
be structured in such a way as to behave differently
and to allow different activities, depending on the
chosen level.
3.1 Common Services
From the users point-of-view, MOBOLAB is a web
server that can be accessed using an ordinary web
browser. A few common services, available from the
home page (Figure 1), have been established to
allow easy usage of the lab. These services include:
An authentication mechanism, to allow only
registered users to access the system at various
levels, according to their authorization level;
A booking system, as the lab was designed to be
used by a single user (or group of users) at a time;
A forum, which can be used as a source of
information (descriptions, user manuals, etc.) and
as a place for discussion among users.
All these components were implemented using
off-the-shelf free software components (SMF for
authentication and forum, MRBS for the reservation
system).
MixingRealityandVirtualWorldsinanEducationalMobileRoboticsRemoteLab
149

3.2 Layered Services
In order to satisfy the needs of different classes of
users, the following service levels have been defined
so far:
Observation. The user at this level can’t interact
with the system. He/she can only observe and listen
what is happening at the remote site. This level is
mainly intended for demonstrations, where an
instructor does all the teaching and pupils attend
remotely. If bandwidth allows, this mode can be
augmented with a Skype group call to enhance the
presence effect.
Figure 1: MOBOLAB home page.
Tele-operation. In this mode, the user can remotely
control movements of a robot. At the present stage, a
simple non-holonomic robot built around a Lego
NXT brick is being used, that is controlled using a
number of virtual buttons on the user’s screen, as it
can be seen in Figure 2. No programming is
available in this mode, and the only automatic
function available is a “return home” function that
can be called at any time.
Figure 2: Tele-operation layer.
In addition, the user has a chance of getting some
sensor data from the robot, and to set some
parameters as rotational and translational velocity.
“BeeBot” programming. This mode (Figure 3)
allows an emulation of the BeeBot robot (Demo,
2008). This machine was designed for the first
approach to mobile robots, and consists in a bee-
shaped robot bearing some pushbuttons on its back.
These buttons allow programming movements on a
flat surface divided into uniform squares (the robot
can only move one square forward, one square
backward, or turn 90° right or left. Steps described
pushing these buttons are stored and the whole
program can then be played as a sequence of
movements, closely replicating some features of the
Logo turtle.
This level currently uses a second robot, built
around a Lego NXT brick, which was specifically
designed for this purpose.
Figure 3: “BeeBot” layer.
Iconic Programming. Iconic programming is
achieved using the classical Lego Mindstorms NXT-
G programming language. So far, it has been
implemented replicating a remote display
mechanism based on VNC, and uses the same robot
used for tele-operation layer.
Textual Programming. Textual programming
can be achieved using NXC language. A very simple
interface has been built that allows editing,
compiling, uploading and executing programs
written in NXC on the same robot used for tele-
operation. Also this layer uses the tele-operation
robot.
4 MAIN DESIGN ISSUES
Once the basic idea that real robots should be used
CSEDU2013-5thInternationalConferenceonComputerSupportedEducation
150
instead of a simulator was established, it became
clear that some efforts should be devoted to
optimizing resource exploitation and to maximize
cost-to-benefit ratio.
4.1 Bandwidth Optimization
Obviously, as far as bandwidth is concerned, video
and audio transmission are the most demanding parts
of the whole system. Luckily enough, in a normal
configuration where the user is connected to the
Internet via an ADSL connection, the fastest path
goes in the right direction (towards the client).
However, smaller bandwidth connections should
also be taken into account.
The research followed these steps: the design
criteria required that two video channels and one
audio channel should be available. The video
channels should carry images from two cameras
placed in different positions over the lab, while the
audio channel should provide acoustic feedback to
the user and, being bi-directional, also allow
communication with a human operator when he/she
is present at the server’s location.
Before establishing video and audio
communication, the available connection speed is
measured, and the most suitable image size and
frame rate are automatically chosen.
4.2 Image Acquisition
The cost requirements of the system call for
inexpensive components to be used whenever
possible, and the imaging system is no exception. At
the client side, low to medium resolution terminals
will normally be found. Most often, a video
projector or an interactive blackboard will be found
due to the classroom usage, and the maximum
display resolution can be assumed to be 1280x1024
px.
Since several pieces of information need to be
displayed at the same time, in most cases there will
be no need to resort to images at a resolution higher
than VGA (640x480 px), and in many cases a
resolution of only 320x240 px will have to be used
in order to fit all images in the screen.
4.3 Image Processing
As testing of MOBLOAB began, it became clear
that, as the lab can be used at various levels,
different backgrounds were desirable. At the
“BeeBot” level, for instance, kids would be amused
by the possibility of switching between “natural”
backgrounds (grass, flowers, etc.) and “artificial”
ones (maps, arrays of numbers or letters, etc. as can
be found for instance in
http://www.terrapinlogo.com/bee-botmats.php). At
higher levels, different tracks, obstacle-cluttered
environments, etc. are desirable to perform different
experiments.
The idea of mechanically changing the mat over
which robots move was soon discarded because it is
too complex and prone to faults, and it was decided
to implement a virtual background system, following
the technique commonly used in TV studios.
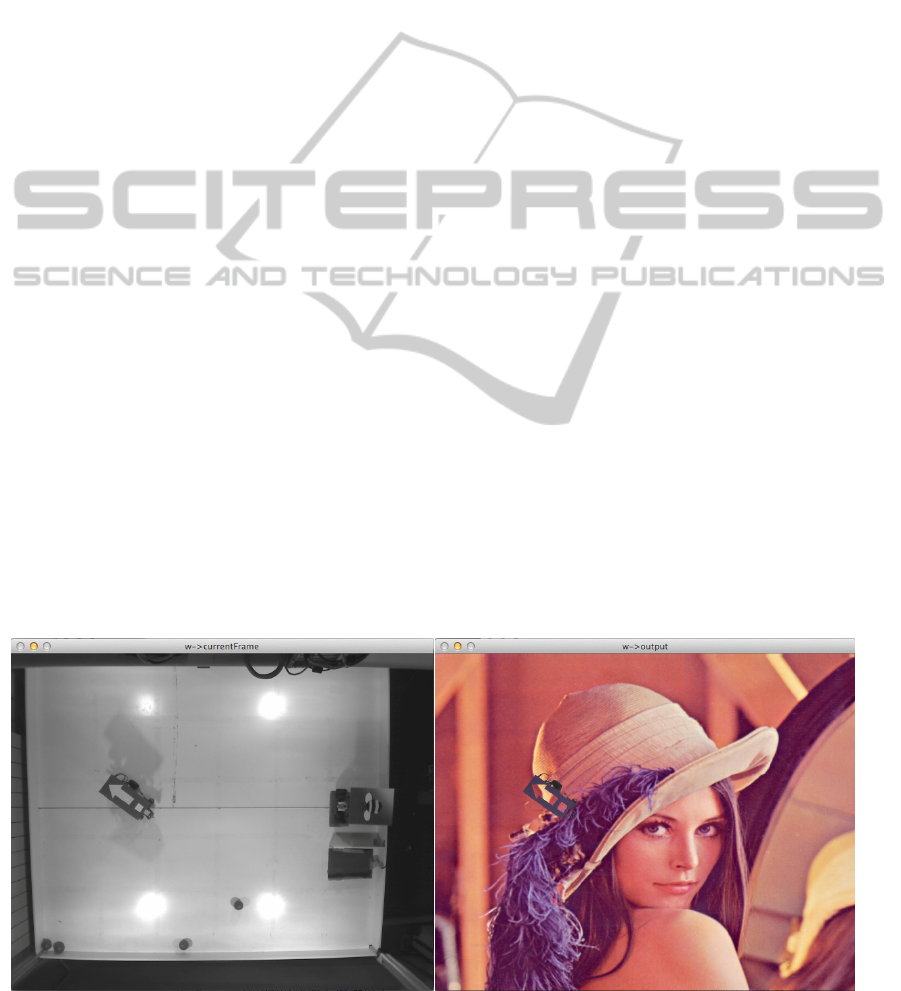
For this reason, a background subtraction system
was implemented, that allows removing the
background from images gathered by the cameras,
and to substitute it with a still picture chosen by the
user or by the system, according to circumstances.
So, while the real robots wander over a white
floor, any static picture can be superimposed giving
the feeling of the robot moving in a different
Figure 4: Background substitution demonstration.
MixingRealityandVirtualWorldsinanEducationalMobileRoboticsRemoteLab
151

environment, as it can be seen in Figure 4, where the
white floor has been substituted by an image that is
very popular among artificial vision researchers.
4.4 Pose Estimation
In its current implementation, MOBOLAB uses two
robots built around Lego NXT bricks using Lego
components. The precision attainable with such
components is low, and position data gathered by
odometry are unreliable even after short movements
from a known position. This calls for an external
localization system.
Luckily, the background substitution mechanism
described above provides robot position data as a
byproduct, and with some enhancements full pose
data can also be obtained. Such data are used by
several other parts of the system for driving and
monitoring the robots. In order to achieve this, each
robot was equipped with a unique set of passive
markers, which can be recognized by the system and
used to compute the robot’s pose.
The used technique will also allow defining
“virtual” obstacles, i.e. obstacles that can be “seen”
by sensors but do not exist in reality, using a method
similar to the one described in Casini et al., 2012.
4.5 Further Bandwidth Reduction
As the last two parts were completed, the idea arose
that position data could also be used to synthesize
robots images. In other words, the idea was that the
background and each robot’s image should be
transmitted only once, leaving the task of correctly
placing the robot’s image over the background to the
client, with the server providing only real time
position data. This of course would almost totally
remove the feeling of watching real robots, but
would in turn dramatically reduce the required
bandwidth, making the use of the system possible
even with very poor Internet connections.
Moreover, the user (or the system) can very
easily switch among the various combinations
offered by the system (real or synthetic background,
real per synthetic robot images, thus making the
system able to cope with a number of different
situations.
4.6 Other Issues
As MOBOLAB, in its current form, was clearly
designed as a single-user system (there may be
several observers in different places, but only one of
them can be in control of the system at any given
time), very simple lock mechanisms were
implemented to prevent multiple users to physically
access the system at the same time. Observation
level, the forum and the reservation system are
instead always accessible.
5 EXPERIMENTAL RESULTS
The system has so far been tested in a fourth grade
elementary school class (9 years old kids), with a
group of elementary school teachers (at a very basic
level of robotic skills) and with some technical high
school students.
All tests were performed using a laptop computer
connected to a video projector, that allowed one
person at a time to control the system, while all the
other watched the screen (shouting suggestions in
the case of younger kids).
The results seem to replicate the results reported
in previous researches (Trevelyan, 2008), i.e. that
remote laboratories can be very well used instead of
local ones, and that the educational outcome is very
good even with an extremely limited investment. An
interesting consideration is that these systems seem
to work best with younger people: our “digital
natives” had no problem at all in learning how to use
the simpler layers of the system (tele-operation and
BeeBot emulation), while teachers experienced
some difficulties even at these simple levels. Most
problems were however related to the interface: for
instance, some of the icons used for buttons had to
be changed to make the more understandable to
older people.
Similar results were obtained with a group of
second grade pupils (7 years): in both cases the level
of attention was extremely high, and at the end of
the test (about three hours long) it was quite difficult
to stop because the kids weren’t tired at all yet.
The experiments performed with second and
fourth grade pupils took place in a school located
about 150 Km from MOBOLAB. Interestingly
enough, no kid had any problem in understanding
what was going on locally and what at the remote
site. The question “do you think it is possible to
control from here a robot that is located in the town
of Brescia” got an unanimous affirmative answer,
and some of the kids even explained how that could
be achieved with a quite good technical precision,
appropriately using terms as “server”, “Internet”,
“webcam”, etc.
High school students, on the other hand, were not
particularly interested in the lower level services,
and concentrated on the robot programming aspects.
CSEDU2013-5thInternationalConferenceonComputerSupportedEducation
152

However, they proved extremely helpful in
debugging the man-machine interface and in
suggesting some important improvements.
6 CONCLUSIONS AND FUTURE
DEVELOPMENTS
An ongoing project was described, that aims at
bringing mobile robots in schools even in
underdeveloped or economically weak areas at a
very low cost, using existing infrastructures and
optimizing usage of equipment through sharing.
Although the to-do list still has countless items, the
system is already useable and is being used in
practical applications.
Among the most important additions, it is worth
mentioning a better integration of virtual
backgrounds with simulated sensor data, the
substitution of the actual robots with more versatile
ones (holonomic, and with a better-designed docking
system for recharging), and a number of
improvements on the user interface side.
REFERENCES
Casini, M., Chinello, F., Prattichizzo, D., Vicino,A., 2008.
RACT: a Remote Lab for Robotics Experiments, Proc.
17
th
IFAC World Congress, Seoul.
Casini, M., Garulli, A., Giannitrapani, A., Vicino, A.
2009. A Matlab-based Remote Lab for Multi-Robot
Experiments, 8th IFAC Symposium on advances in
control education, Kumamoto.
Casini, M., Garulli, A., Giannitrapani, A., Vicino, A.,
2011. A LEGO Mindstorms multi-robot setup in the
Automatic Control Telelab, in Proc. 18th IFAC World
Congress, pp. 9812-9817, Milano, Italy.
Casini, M., Garulli, A., Giannitrapani, A., Vicino, A.,
2012. A Remote Lab for Multi-Robot Experiments
with Virtual Obstacles., Advances in Control
Education, Vol. 9, No. 1, pp. 354-359.
Demo, G. B., 2008. Programming Robots in Primary
Schools Deserves a Renewed Attention, Emerging
Technologies and Information Systems for the
Knowledge Society, Lecture Notes in Computer
Science, Springer.
Guimaraes, E., Maffeis, A., Pereira, J., Russo, B.,
Cardozo, E., Bergerman, M., Magalhaes, M.F., 2003.
REAL: a virtual laboratory for mobile robot
experiments, IEEE Transactions on Education, Vol.
46, N. 1.
Johnson, J., 2003. Children, robotics, and education,
Artificial Life and Robotics Vol. 7, N. 1-2, Springer-
Verlag.
Khamis, A., Rivero, D. M., Rodriguez, F., and Salichs, M.,
2003. Pattern-based architecture for building mobile
robotics remote laboratories, Proc. ICRA '03. IEEE
International Conference on Robotics and
Automation.
Kitano, H., Asada, M., Kuniyoshi, Y., Noda, I., Osawa, E.,
and Matsubara, H., 1997. RoboCup - A Challenge
Problem for AI, AI Magazine Volume 18 Number 1.
Papert, S., 2005. Teaching Children Thinking.
Contemporary Issues in Technology and Teacher
Education, 5(3). AACE.
Trevelyan, J., 2008. Lessons learned from 10 years
experience with remote laboratories, Proc.
International Conference on Engineering Education
and Research “Progress Through Partnership”,
Ostrava.
Tzafestas, C. S., Palaiologou, N., Alifragis, M., 2006.
Virtual and remote robotic laboratory: comparative
experimental evaluation, IEEE Trans. On Education,
Vol. 49, N. 3.7.
MixingRealityandVirtualWorldsinanEducationalMobileRoboticsRemoteLab
153
