
Multistep Fuzzy Classifier Design with Self-tuning
Coevolutionary Algorithm
Roman Sergienko
1,2
and Eugene Semenkin
2
1
Institute of Commincation Engineering, Ulm University, Ulm, Germany
2
Department of System Analysis and Operation Research, Siberian State Aerospace University, Krasnoyarsk, Russia
Keywords: Fuzzy Classifier, Michigan Method, Pittsburgh Method, Coevolutionary Algorithm, Self-tuning, Strategy
Adaptation, Multistep Procedure.
Abstract: A method of Michigan and Pittsburgh approaches combining for fuzzy classifier design with evolutionary
algorithms is presented. Michigan-style stage provides fast search of fuzzy rules with the best grade of
certainty values for different classes and smoothing of randomness at initial population forming. Pittsburgh
method provides rules subset search with the best performance and predefined number of the rules and
doesn’t require a lot of computational power. Besides self-tuning cooperative-competitive coevolutionary
algorithm for strategy adaptation is used on Michigan and Pittsburgh stages of fuzzy classifier design. This
algorithm solves the problem of genetic algorithm parameters setting automatically. The next result is
multistep fuzzy classifier design based on multiple repetition of previous fuzzy classifier design. After each
iteration standard deviation of classification performance decreases and classification performance
increases. Results of numerical experiments for machine learning problems from UCI repository are
presented. Fuzzy classifier design methods comparison with alternative classification methods by
performance value demonstrates advantages of the proposed algorithms.
1 INTRODUCTION
Classification can be an important data analysis
problem for control system construction. Fuzzy
classifier (Ishibuchi, 1999) is the classification
algorithm based on fuzzy rules extraction from
numerical data. Superiority of this method upon
other classification algorithms (e.g. neural networks)
is provided by fuzzy rules which are linguistic
expressions and they are available for people
understanding. Thus fuzzy classifier is one of the
data mining methods for knowledge discovery. Each
fuzzy rule consists of fuzzy terms for attributes, a
name of the most appropriate class, and grade
certainty that is calculated with a learning sample
(Ishibuchi, 1999).
Fuzzy classifier design can be considered as
optimization problem. In this case we need to find
the best fuzzy classifier. Fuzzy classifier design
consists of two problems. First one is rule base
generating and second one is membership functions
tuning. It should be noted the first problem is more
complicated because dimension of this problem can
be high and a lot of variables are discrete. So we
observe only fuzzy rule base generating in this
paper.
Because fuzzy rule base generating is
complicated computational problem the popular
method of this problem solving is the genetic-based
machine learning (Herrera, 2008). There are two
basic ways of genetic algorithm applying for fuzzy
rule base generating: Michigan-style method and
Pittsburgh-style method. In Michigan approach
(Holland, 1978) the chromosomes are individual
rules and a rule set is represented by the entire
population. In Pittsburgh method (Smith, 1980) the
chromosomes are rule sets at whole. The problem in
Michigan approach is the conflict between
individual rule fitness and performance of fuzzy rule
set. Pittsburgh-style systems require a lot of
computational burden. So Michigan and Pittsburgh
method combining is the promising approach. In
(Ishibuchi, 2000) hybridization Pittsburgh method
with Michigan-style algorithm using Michigan
method as mutation operator in Pittsburgh-style
algorithm is presented.
A new method of Michigan and Pittsburgh
approaches combining for fuzzy classifier rule base
113
Sergienko R. and Semenkin E..
Multistep Fuzzy Classifier Design with Self-tuning Coevolutionary Algorithm.
DOI: 10.5220/0004426501130120
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 113-120
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

design with evolutionary algorithms is presented in
this paper. Fuzzy classifier rule base design consists
of two main stages. At the first stage Michigan
method is used for fuzzy rules search with high
grade of certainty. At the second stage the Pittsburgh
method is applied for subset of the rules searching
with the best classification performance and
predefined number of rules. Constraint for number
of rules is used at this stage of fuzzy classifier
design. As fuzzy classifier is data mining tool it is
more preferable to have minimal number of rules.
Preparatory procedures are attribute fuzzification
and initial population of fuzzy rules forming using a-
priori information from a learning sample.
Another problem with genetic algorithm
applying is the algorithm parameters setting. This
problem is especially essential for optimization
problems with high computational complexity such
as fuzzy rule base generating. There are some
methods for GA parameter setting problem solving.
We suggest special procedure named self-tuning
cooperative-competitive coevolutionary algorithm
for this problem solving (Sergienko, 2010). This
method combines ideas of cooperation and
competition among subpopulations in the
coevolutionary algorithm. We tested this algorithm
for some computationally simple problems for
foundation of its efficiency and then used it for
fuzzy rule base forming. Cooperative-competitive
coevolutionary algorithm for unconstrained
optimization is applied at the Michigan-style stage
and cooperative-competitive coevolutionary
algorithm for constrained optimization is used at the
Pittsburgh-style stage.
The next idea is the multistep fuzzy classifier
design. After multiple fuzzy classifiers forming we
have a set of fuzzy classifiers for each classification
problem. The natural step is a collective forming
fuzzy rule base using a set of classifiers generated
with our approach. It is possible to increase
classification efficiency and decrease diversity of
classification efficiency using this method. For
collective design of fuzzy classifier cooperate-
competitive coevolutionary algorithm can be applied
again. Thus we can repeat this procedure more
times. So we have formulated a multistep procedure
of fuzzy classifier design.
This multistep procedure for fuzzy classifier rule
base design was applied for some machine learning
problems from UCI repository. Statistical
investigations were performed. Results of numerical
experiments are demonstrated. Classification
performance values were compared with results of
alternative classifiers.
Investigation of Michigan and Pittsburgh method
combination for fuzzy classifier rule base design is
introduced in Section 2. The numerical results of
fuzzy classifier design and multistep procedure
suggestion are described in Section 3. The results of
numerical experiments for multistep fuzzy classifier
design are presented in Section 4. Conclusions are
listed in Section 5.
2 A METHOD OF FUZZY
CLASSIFIER DESIGN
The Michigan and Pittsburgh methods combining
for fuzzy classifier design implicates sequential
using of the first and the second approaches. At the
first stage the Michigan method is used for fuzzy
rules search with high grade of certainty. At the
second stage the Pittsburgh method is applied for
subset of the rules searching with the best
classification efficiency with constraint for
maximum number of rules.
A prior to main evolutionary stages of our
method there are two important preparatory steps of
fuzzy classifier design: attribute fuzzification (fuzzy
number semantics setting) and initial population of
fuzzy rules forming for Michigan approach with a
priori information from a learning sample. So let’s
consider the preparatory steps and the main stages of
fuzzy classifier design in more details.
2.1 Attribute Fuzzification
In this work for each attribute of a machine learning
problem five triangular fuzzy numbers and a term
“ignoring” (it means that an attribute isn’t used in
the corresponding fuzzy rule) are determined: 1 –
“very small”, 2 – “small”, 3 – “average”, 4 –
“large”, 5 – “very large”, 6 – “ignoring”. If an
attribute has both negative and positive values it is
better to use words “negative”, “null” and “positive”
instead “small”, “average” and “large” accordingly.
A triangular fuzzy number is characterized by
three parameters: left boundary a, centre b, and right
boundary c. The maximum B and minimum A values
of an attribute are determined from a learning
sample. For uniform filling of attribute variability
interval [A; B] by fuzzy numbers the parameters are
defined by the following equations:
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
114

.4..1 ),1()(
6
1
3
1
,5..1 ),1()(
6
1
6
1
,5..2 ),1()(
6
1
iiABAc
iiABAb
iiABAa
i
i
i
2.2 Initial Population of Fuzzy Rules
Forming
This step is very important because random
generating of fuzzy rules is unacceptable.
Classification problems can have a lot of attributes.
So, if we use 5 fuzzy terms and term “ignoring” for
each attribute and number of attributes is equal d,
total number of rules is equal 6
d
-1. In this case
probability of random fuzzy rule generating that
would have at least one corresponding element from
a learning sample is very low. So using a priori
information from a learning sample is necessary for
initial population of fuzzy rules forming. There are
some approaches for this problem solving: (Martín-
Muñoz, 2010, Palacios, 2010, and Nojima, 2010).
Our procedure is considered in the following steps:
1) Let n be a number of rules at Michigan-style
stage of fuzzy classifier design, k be a number of the
classes, d be a number of attributes.
2) Put m=n/k.
3) Sort a learning sample by number of the class
and determine boundaries for each class in the sorted
array (positions of the first and the last elements for
each class).
4) For i:=1 to k do:
4.1) For j:=1 to m do:
4.1.1) Perform random selection of the element
for the class i from a sorted learning sample.
4.1.2) For t:=1 to d do:
4.1.2.1) Determine the nearest centre of a fuzzy
number for attribute t.
4.1.2.2) Put the corresponding fuzzy number as
element of the generated fuzzy rule.
4.1.2.3) Exchange the fuzzy number to a term
“ignoring” with probability equals to 1/6 (we have 6
terms for each attribute).
5) Fill population for Michigan-style stage by
generated fuzzy rules.
This procedure provides generating equal
number of informative fuzzy rules for each class.
2.3 Michigan-style Stage
The main idea of this stage is to improve initial
fuzzy rules with genetic algorithm.
The chromosomes are the fuzzy rules.
Chromosome length is equal to the number of
attributes, each gene is a sign for the corresponding
fuzzy term (1..6). We needn’t to use a gene for
output because the appropriate class for the rule is
determined automatically. Fitness function is grade
certainty of the fuzzy rule that is calculated by a
learning sample (Ishibuchi, 1999). Genetic algorithm
for unconstrained optimization is applied. New
population forming method is modified. After
genetic generation performing parents and child are
combined to the united array. Different fuzzy rules
with the best values of fitness function for each class
are selected to the next generation. This new
population forming method provides diversity of
rules for each class and diversity of classes in
population. For each generation classification
performance is calculated for population at whole.
Population with the best value of classification
performance is used for the next stage of fuzzy
classifier design.
Steps of Michigan-style stage:
1) Let n is population size (number of initial
fuzzy rules), N is generation number, k is number of
classes.
2) Put m=n/k.
3) Calculate classification performance F
0
of
initial population for a learning sample (correctly
classified part of a test sample).
4) Remember initial population P
0
.
5) For i:=1 to N
5.1) Perform all necessary genetic operators with
population (selection, recombination, and mutation).
5.2) Combine parents and offspring to the united
array.
5.3) Sort the array by number of the class and
determine boundaries for each class in the sorted
array.
5.4) For j:=1 to k do:
5.4.1) Sort a part of the array for class j by grade
certainty.
5.4.2) Find m different rules for class j with the
best value of grade certainty and copy them to the
next population P
i
.
5.5) Calculate classification performance F
i
of
population P
i
for a learning sample.
5.6) If F
i
> F
0
then F
0
:=F
i
and P
0
:=P
i
.
6) Return P
0.
2.4 Pittsburgh-style Stage
The main idea of Pittsburgh style-stage is to find
subset of computed on Michigan-style stage fuzzy
rule set with the best classification efficiency and
MultistepFuzzyClassifierDesignwithSelf-tuningCoevolutionaryAlgorithm
115

constraint satisfaction for maximum number of
rules. Genetic algorithm for constrained
optimization is used for this stage.
The chromosomes are the fuzzy rule sets.
Chromosome length is equal to the population size
for Michigan-style stage. Chromosome genes are
binary. Value “1” means using of the corresponding
rule in the set, value “0” means ignoring of the
corresponding rule. Fitness function is classification
performance for a learning sample. Constraint for
maximum number of rules is used. This value is
specified by a researcher. It depends on
classification problem dimension (number of
attributes and number of classes). The constraint is
used because it is better to have small number of
rules in the final rule base. New generation forming
method is standard (offspring replace parents with
the exception of the best parent). Special methods of
constraint satisfaction for genetic algorithms are
used (e.g. dynamic penalty function, adaptive
penalty function).
Steps of Pittsburgh-style stage:
1) Let N is number of generations, M is
population size, n is chromosome length (n is equal
to population size for Michigan-style stage), G is
constraint for maximum number of used fuzzy rules.
2) Generate M random binary strings with length
equals n and with maximum number of “1” at each
string is not more than G.
3) For i:=1 to N do all necessary genetic
operators and new generation forming.
4) Return the best solution.
2.5 Self-tuning
Cooperative-competitive
Coevolutionary Algorithm
One of the most complicated problems for
application of genetic algorithm is the algorithm
parameters setting. Conventional genetic algorithm
has at least three methods of selection (proportional,
tournament, and rank), three methods of
recombination (one-point, two-point, and uniform).
Mutation probability requires tuning too. For
constrained optimization problems it is necessary to
choose a constraint satisfaction method. Amount of
various combinations can be estimated at tens.
Exhaustive search of combinations requires a lot of
time and computational power. Especially it’s hard
for complicated problems as fuzzy classifier design.
One run of genetic algorithm for fuzzy classifier
design can be in progress for some hours.
Parameters combination selection by chance is also
bad idea as algorithm efficiency on the same
problem can differ very much for different
parameters setting.
We develop an approach (Sergienko, 2010) that
uses both competition and cooperation of individual
genetic algorithms with different parameters setting.
Resource redistribution provides domination of the
subpopulation with the best for problem-in-hand
search strategy. Cooperation of individual
conventional genetic algorithms is provided by
migration of the best solutions to all of the
individual genetic algorithms. So coevolutionary
algorithm efficiency can increase because of positive
effect of subpopulations interacting. This
cooperative-competitive coevolutionary genetic
algorithm needs no tuning of special parameters.
We showed reasonability of cooperate-
competitive coevolutionary algorithm application for
some computationally simple problems and then we
made a decision to use this approach for more
complicated problems such as fuzzy rule base
generating. It is very difficult to perform complex
investigation of self-tuning cooperate-competitive
coevolutionary algorithm for computationally
complex problems because required computational
power or computational time would be huge.
Self-tuning cooperative-competitive
coevolutionary genetic algorithm for unconstrained
optimization is applied at Michigan-style stage of
fuzzy classifier design and coevolutionary genetic
algorithm for constrained optimization is used at
Pittsburgh-style stage. We use three methods of
selection (proportional, tournament, and rank), three
methods of recombination (one-point, two-point, and
uniform), adaptive mutation, and three methods of
constraint satisfaction (“death” penalty, dynamic and
adaptive penalty functions). Totally there are 9
subpopulations with different parameters setting for
Michigan-style stage and 27 subpopulations for
Pittsburgh-style stage. So self-tuning cooperative-
competitive coevolutionary genetic algorithm
provides the solution of GA parameters setting
problem. Another effect is possibility of parallel
computing for fuzzy classifier design.
3 NUMERICAL RESULTS FOR
FUZZY CLASSIFIER DESIGN
AND MULTISTEP
PROCEDURE SUGGESTION
The developed method of fuzzy classifier design has
been applied for a number of classification machine
learning problems from UCI repository:
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
116
- Credit (Australia-1) (14 attributes, 2 classes);
- Liver Disorder (6 attributes, 2 classes);
- Iris (4 attributes, 3 classes);
- Yeast (8 attributes, 10 classes);
- Glass Identification (9 attributes, 7 classes);
- Landsat Images (4 attributes, 6 classes).
Statistical investigations were performed for all
problems. We tested our approach for 20 times for
each classification problem. We calculated mean and
standard deviation for classification performance
values. Statistical significance of our conclusions
was valid with Wilcoxon criteria.
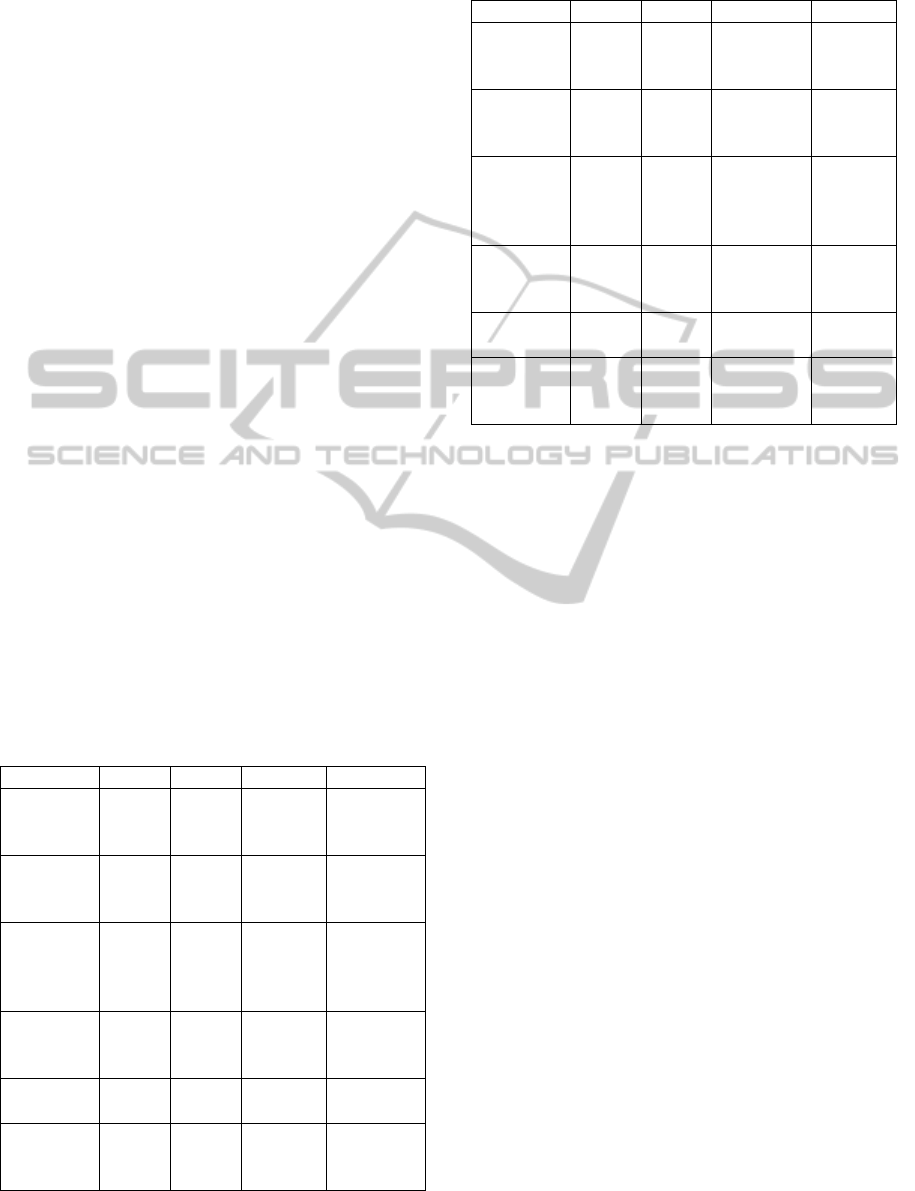
For each problem average and maximum (only
for Pittsburgh-style stage) classification performance
values for each stage and initial number of rules are
presented in Tables 1. The column 1 contains
average performance values after initial rules
forming, the column 2 contains average performance
values after Michigan-style stage, the column 3
contains average performance values after
Pittsburgh-style stage, and the column 4 contains
maximum performance values after Pittsburgh-style
stage. There is feasible number of rules in the
brackets. There are standard deviation values of
classification performance for each method stage in
Table 2 (the column 1, 2, and 3 accordingly). The
column 4 in the Table 2 contains parameter of rules
repeatability p = (20x – y) / 19x, when x is constraint
for the maximum number of rules in the base and y
is number of the unique rules at all 20 generated
bases for each classification problem. Interval for p
is [0;1]. It’s better to increase this parameter.
Table 1: Classification performance values for fuzzy
classifier design.
Problem 1 2 3 4
Credit
(Australia)
0,854 0,870
0,827(10)
0,861(20)
0,873(30)
0,870(10)
0,890(20)
0,891(30)
Liver
Disorder
0,595 0,653
0,666(10)
0,682(15)
0,692(20)
0,687(10)
0,710(15)
0,725(20)
Iris
0,945 0,979
0,908(3)
0,951(4)
0,971(5)
0,975(6)
0,947(3)
0,973(4)
0,987(5)
0,987(6)
Yeast
0,417 0,495
0,573(20)
0,586(30)
0,593(60)
0,598(20)
0,606(30)
0,626(60)
Glass
Identification
0,640 0,687
0,737(20)
0,781(30)
0,757(20)
0,827(30)
Landsat
Images
0,793 0,812
0,838(10)
0,847(15)
0,849(20)
0,849(10)
0,857(15)
0,857(20)
Table 2: Standard deviation values for fuzzy classifier
design.
Problem 1 2 3 4
Credit
(Australia)
0,0093 0,0065
0,0248(10)
0,0123(20)
0,0103(30)
0,00(10)
0,00(20)
0,00(30)
Liver
Disorder
0,0208 0,0110
0,0150(10)
0,0167(15)
0,0173(20)
0,17(10)
0,10(15)
0,09(20)
Iris
0,0152 0,0039
0,0564(3)
0,0262(4)
0,0130(5)
0,0107(6)
0,67(3)
0,56(4)
0,51(5)
0,56(6)
Yeast
0,0186 0,0169
0,0180(20)
0,0171(30)
0,0221(60)
0,00(20)
0,00(30)
0,07(60)
Glass
Identification
0,0226 0,0202
0,0139(20)
0,0183(30)
0,02(20)
0,04(30)
Landsat
Images
0,0123 0,0081
0,0078(10)
0,0042(15)
0,0055(25)
0,36(10)
0,44(15)
0,42(25)
Large number of rules isn’t used at initial
population of fuzzy rules forming stage. For
reasoning of this statement we can show that number
of all possible fuzzy rules varies from 216 (3
attributes) to 4,7·10
18
(24 attributes) and maximum
number of initial rules equals 200. But all fuzzy rule
bases are operable after initial population forming.
Classification performance values after
Michigan-style stage increase by 0,01-0,08. Besides
diversity of classification performance value
decreases a lot (see the Table 2). So we can conclude
that Michigan-style stage is necessary for light
increment of fuzzy rule set efficiency and smoothing
of randomness at initial population forming.
Population size for Pittsburgh-style stage is equal
to the following: 100 individuals * 27
subpopulations = 2700. Generation number equals
100 because convergence rate for cooperative-
competitive coevolutionary algorithm is higher than
for conventional GA (Sergienko, 2010). In the
Table 1 we can see that classification performance
values after Pittsburgh-style stage performing can be
better than performance values after Michigan-style
stage although number of rules is reduced. It means
that a large rule set is not always better by
performance. “Bad” rules have damaged the effect.
So interpretability of fuzzy rule set is improved and
classification efficiency can be improved too after
Pittsburgh-style stage performing. It’s a positive
feature of Pittsburgh-style stage. Negative one is that
deviation of classification performance value can
increase. Low repeatability of rules is another
problem (see the Table 2, the column 4).
MultistepFuzzyClassifierDesignwithSelf-tuningCoevolutionaryAlgorithm
117
A natural step for fuzzy rules repeatability
increasing and classification performance deviation
decreasing is a collective design fuzzy rule base
using a set of classifiers generated with our
approach. In this case Pittsburgh-style stage of fuzzy
classifier forming is performed again. A set of fuzzy
rule bases is analogy of fuzzy rule base generated
after Michigan-style stage. We also use constraint
for feasible number of rules. For collective forming
of fuzzy classifier cooperate-competitive
coevolutionary algorithm can be applied again. For
example, we have got 20 fuzzy rule sets and then we
can repeat Pittsburgh-style procedure using unique
rules from previous sets as initial rules for
Pittsburgh-style stage. Thus we can repeat this
procedure some more times. So we formulate
multistep procedure of fuzzy classifier design. We
can use threshold value of classification
performance increasing, standard deviation
decreasing, or number of unique rules decreasing as
a stopping criterion for our multistep procedure. The
action sequence for multistep fuzzy classifier
forming is the following:
1) Select start fuzzy rules with a special
procedure (see paragraph 2.2) and repeat this
procedure n times.
2) Perform one-step fuzzy classifier design (see
paragraphs 2.3, 2,4, and 2.5) and repeat this
procedure n times.
3) Form from n fuzzy classifiers initial
population for the next iteration (unite fuzzy rule
bases and delete repetitive fuzzy rules).
4) If stopping criterion is true end else go to
position 2.
Using multistep procedure fuzzy rule
repeatability must increase and classification
efficiency diversity must decrease. Besides it is
possible to increase classification performance. We
have implemented this method and approved our
forecasts.
4 MULTISTRP FUZZY
CLASSIFIER DESIGN
INVESTIGATIONS
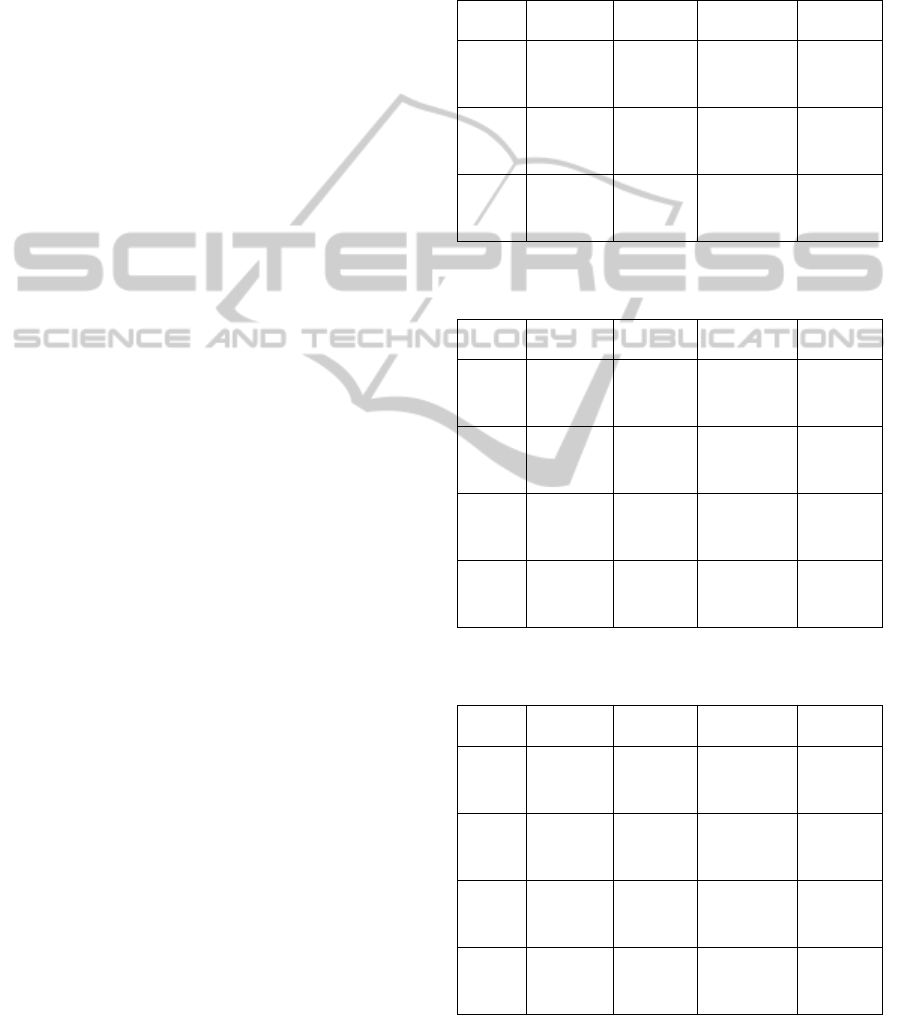
Some statistical investigations were performed for
all problems. For each problem maximum and
average classification performance values, standard
deviation of classification performance, and
parameter of rules repeatability are presented in the
Tables 3-8. There is a feasible number of rules in the
brackets. Stopping criterion is average classification
performance increasing less than 0,005 or standard
deviation equals to 0. For some cases we have
performed one or two steps additionally for equal
step number providing for the same problem.
Table 3: Results of multistep fuzzy classifier design for
Credit (Australia-1).
Iteration
Maximum
perform.
Average
perform.
Standard
deviation
Rules
repeat.
1
0,870(10)
0,890(20)
0,891(30)
0,827(10)
0,861(20)
0,873(30)
0,0248(10)
0,0123(20)
0,0104(30)
0,00(10)
0,00(20)
0,00(30)
2
0,891(10)
0,919(20)
0,926(30)
0,888(10)
0,918(20)
0,924(30)
0,0017(10)
0,0027(20)
0,0017(30)
0,83(10)
0,83(20)
0,74(30)
3
0,891(10)
0,919(20)
0,928(30)
0,891(10)
0,919(20)
0,926(30)
0,0000(10)
0,0000(20)
0,0013(30)
0,92(10)
0,89(20)
0,83(30)
Table 4: Results of multistep fuzzy classifier design for
Liver Disorder.
Iterati
on
Maximum
perform.
Average
perform.
Standard
deviation
Rules
repeat.
1
0,687(10)
0,710(15)
0,725(20)
0,666(10)
0,682(15)
0,692(20)
0,0173(10)
0,0167(15)
0,0150(20)
0,17(10)
0,10(15)
0,09(20)
2
0,713(10)
0,739(15)
0,757(20)
0,705(10)
0,731(15)
0,748(20)
0,0045(10)
0,0061(15)
0,0055(20)
0,50(10)
0,61(15)
0,67(20)
3
0,716(10)
0,739(15)
0,757(20)
0,714(10)
0,735(15)
0,754(20)
0,0023(10)
0,0041(20)
0,0023(20)
0,89(10)
0,77(15)
0,82(20)
4
0,716(10)
0,742(15)
0,757(20)
0,716(10)
0,738(15)
0,755(20)
0,0000(10)
0,0028(15)
0,0025(20)
0,97(10)
0,88(15)
0,86(20)
Table 5: Results of multistep fuzzy classifier design for
Yeast.
Iterati
on
Maximum
perform.
Average
perform.
Standard
deviation
Rules
repeat.
1
0,598(20)
0,606(30)
0,626(60)
0,573(20)
0,586(30)
0,593(60)
0,0180(20)
0,0171(30)
0,0221(60)
0,00(20)
0,00(30)
0,07(60)
2
0,609(20)
0,641(30)
0,674(60)
0,605(20)
0,633(30)
0,668(60)
0,0024(20)
0,0043(30)
0,0043(60)
0,57(20)
0,59(30)
0,62(60)
3
0,617(20)
0,651(30)
0,676(60)
0,614(20)
0,647(30)
0,672(60)
0,0025(20)
0,0034(30)
0,0024(60)
0,81(20)
0,77(30)
0,73(60)
4
0,621(20)
0,651(30)
0,678(60)
0,618(20)
0,649(30)
0,675(60)
0,0020(20)
0,0012(30)
0,0022(60)
0,86(20)
0,83(30)
0,81(60)
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
118
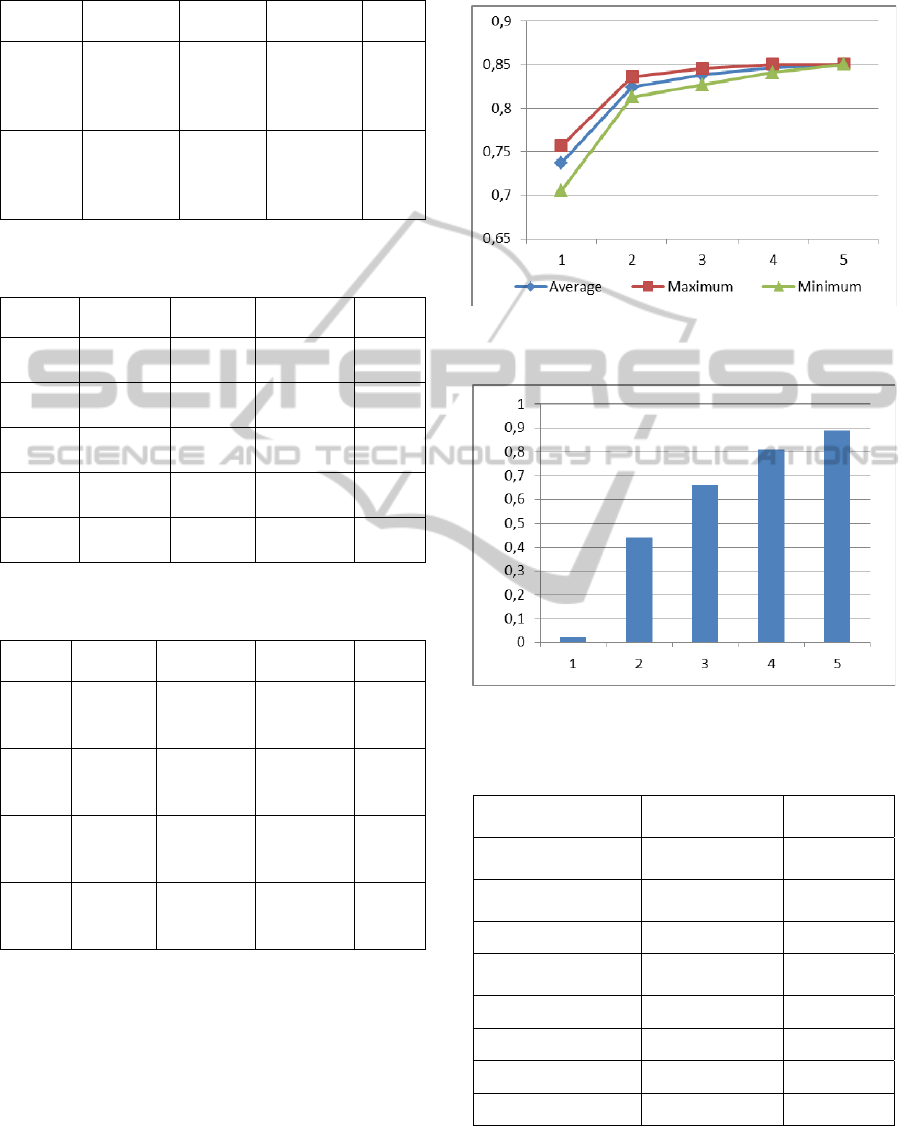
Table 6: Results of multistep fuzzy classifier design for
Iris.
Iteration
Maximum
perform.
Average
perform.
Standard
deviation
Rules
repeat.
1
0,947(3)
0,973(4)
0,987(5)
0,987(6)
0,908(3)
0,951(4)
0,971(5)
0,975(6)
0,0564(3)
0,0262(4)
0,0130(5)
0,0107(6)
0,67(3)
0,56(4)
0,51(5)
0,56(6)
2
0,980(3)
0,980(4)
0,987(5)
0,993(6)
0,980(3)
0,980(4)
0,987(5)
0,993(6)
0,0000(3)
0,0000(4)
0,0000(5)
0,0000(6)
0,93(3)
0,69(4)
0,82(5)
0,78(6)
Table 7: Results of multistep fuzzy classifier design for
Glass Identification.
Iteration
Maximum
perform.
Average
perform.
Standard
deviation
Rules
repeat.
1
0,757(20)
0,827(30)
0,737(20)
0,781(30)
0,0139(20)
0,0183(30)
0,02(20)
0,04(30)
2
0,836(20)
0,874(30)
0,824(20)
0,861(30)
0,0074(20)
0,0135(30)
0,44(20)
0,44(30)
3
0,846(20)
0,888(30)
0,838(20)
0,880(30)
0,0063(20)
0,0047(30)
0,66(20)
0,71(30)
4
0,850(20)
0,888(30)
0,846(20)
0,886(30)
0,0041(20)
0,0025(30)
0,81(20)
0,79(30)
5
0,850(20)
0,888(30)
0,850(20)
0,886(30)
0,0000(20)
0,0025(30)
0,89(20)
0,87(30)
Table 8: Results of multistep fuzzy classifier design for
Landsat Images.
Iteration
Maximum
perform.
Average
perform.
Standard
deviation
Rules
repeat.
1
0,849(10)
0,857(15)
0,857(25)
0,838(10)
0,847(15)
0,849(25)
0,0078(10)
0,0042(15)
0,0055(25)
0,36(10)
0,44(15)
0,42(25)
2
0,851(10)
0,861(15)
0,864(25)
0,850(10)
0,859(15)
0,863(25)
0,0011(10)
0,0014(15)
0,0009(25)
0,69(10)
0,64(15)
0,67(25)
3
0,853(10)
0,862(15)
0,866(25)
0,852(10)
0,860(15)
0,865(25)
0,0004(10)
0,0015(15)
0,0010(25)
0,86(10)
0,77(15)
0,79(25)
4
0,853(10)
0,862(15)
0,866(25)
0,852(10)
0,862(15)
0,866(25)
0,0001(10)
0,0004(15)
0,0003(25)
0,94(10)
0,87(15)
0,86(25)
We can see that standard deviation of
classification performance decreases and parameter
of rules repeatability increases for each step of fuzzy
classifier design. Also classification performance
increases for all problems using multistep fuzzy
classifier design.
For illustrating of multistep fuzzy classifier
design features we demonstrate dynamics of
classification performance, deviation, and parameter
of rules repeatability changing at the figures 1-2 for
Glass Identification problem with constraint for
rules number equals to 20.
Figure 1: Classification performance changing for Glass
Identification problem.
Figure 2: Parameter of rules repeatability changing for
Glass Identification problem.
Table 9: Comparison of the classifiers.
Algorithm
Credit
(Australia-1)
Liver
Disorder
One-step fuzzy
classifier design
0,891 0,725
Multistep fuzzy
classifier design
0,928 0,757
Bayesian approach 0,847 0,629
Multilayer
perception
0,833 0,693
Boosting 0,760 0,656
Bagging 0,847 0,630
RSM 0,852 0,632
CCEL 0,866 0,644
For the first two problems comparison with
alternative classification methods has been
MultistepFuzzyClassifierDesignwithSelf-tuningCoevolutionaryAlgorithm
119

performed. These algorithms are Bayesian approach,
multilayer perceptron, boosting (Schapire, 2001),
bagging (Breiman, 1998), random subspace method
(RSM) (Ho, 1998), and cooperative coevolution
ensemble learning (CCEL) (Zhuravlev, 1998 and
Voroncov, 2005). The results were obtained from
(Voroncov, 2005). The comparison by the best
performance value is presented in the Table 9.
5 CONCLUSIONS
The first result is that new method of Michigan and
Pittsburgh approaches combing for fuzzy classifier
rule base design has investigated on some
classification problem from UCI repository. This
method has high operation speed and efficiency as
advantages of both approaches are used. Self-tuning
cooperative-competitive coevolutionary genetic
algorithm for strategy adaptation is used at both
evolutionary stages of fuzzy classifier design. It
allows refusing the genetic algorithm parameters
setting without negative effect for algorithm
efficiency.
The second main result of our work is multistep
fuzzy classifier design investigations. Having
generated some fuzzy classifiers we are able to
construct more effective classifier from previous
classifiers using cooperative-competitive
coevolutionary algorithm again. Using this method
semantically similar fuzzy classifiers are generated.
The approach of multistep fuzzy classifier forming
has the following features:
1) This method improves classification
performance without increasing number of rules.
2) This method reduces diversity of performance
values for multiple algorithm runs, i.e. the method
has higher statistical stability.
3) The method increases repeatability of fuzzy
rules for multiple algorithm runs.
4) Corresponding to features 1-3 trends slow
down for increasing of step number.
5) The method is more effective for more
complicated classification problems (more attributes
and classes).
Fuzzy classifier design methods comparison with
alternative classification methods by performance
value demonstrates that both fuzzy classifier
forming methods have either the same efficiency as
present-day classification algorithms or even they
are more efficient.
REFERENCES
Ishibuchi, H., Nakashima, T., and Murata, T. 1999.
Performance evaluation of fuzzy classifier systems for
multidimensional pattern classification problems.
IEEE Trans. on Systems, Man, and Cybernetics, vol.
29, pp. 601-618.
Herrera, F. 2008. Genetic fuzzy systems: taxonomy,
current research trends and prospects. Evol. Intel., vol.
1, no. 1, pp. 27–46.
Holland, J. H. and Reitman, J. S. 1978. Cognitive systems
based on adaptive algorithms. In D. A. Waterman and
F. Hayes-Roth, editors, Pattern-Directed Inference
Systems. Academic Press, San Diego, CA.
Smith, S. F. 1980. A Learning System Based On Genetic
Adaptive Algorithms. PhD thesis, Department of
Computer Science, University of Pittsburgh,
Pennsylvania.
Ishibuchi, H., Nakashima T., and Kuroda, T. 2000. A
hybrid fuzzy GBML algorithm for designing compact
fuzzy rule-based classification systems. Proc. of 9th
IEEE International Conference on Fuzzy Systems,
(2000), pp. 706-711.
Sergienko, R. B. and Semenkin, E. S. 2010. Competitive
cooperation for strategy adaptation in coevolutionary
genetic algorithm for constrained optimization. Proc.
of 2010 IEEE Congress on Evolutionary Computation,
pp. 1626-1631.
Martín-Muñoz, P. and Moreno-Velo. F. J. 2010. FuzzyCN2:
an algorithm for extracting fuzzy classification rule lists.
Proc. of 2010 IEEE International Conference on Fuzzy
Systems, pp. 1783-1789.
Palacios, A. M., S´anchez L., and ´es Couso. I. 2010.
Preprocessing vague imbalanced datasets and its use in
genetic fuzzy classifiers. Proc. of 2010 IEEE
International Conference on Fuzzy Systems, pp. 2595-
2602.
Nojima, Y., Kaisho, Y., and Ishibuchi, H. 2010. Accuracy
improvement of genetic fuzzy rule selection with
candidate rule addition and membership tuning. Proc.
of 2010 IEEE International Conference on Fuzzy
Systems, pp. 527 – 534.
Schapire, R. 2001. The boosting approach to machine
learning: an overview. MSRI Workshop on Nonlinear
Estimation and Classification, Berkeley, CA.
Breiman, L. Arcing classifiers. 1998. The Annals of
Statistics, vol. 26, pp. 801-849 (Mar. 1998).
Ho, T. K. 1998. The random subspace method for
constructing decision forests. IEEE Trans. on Pattern
Analysis and Machine Intelligence, vol. 20, pp.832-
844 (Aug. 1998).
Zhuravlev, J. I. 1998. An algebraic approach to recognition
or classifications problems. In Pattern Recognition and
Image Analysis, vol. 8, no. 1, pp. 59–100.
Voroncov, V.V. and Kanevsky, D, Y. 2005. Cooperative
coevolution algorithm ensemble learning. Tavricheskiy
Vestnik Informatiki I Matematiki (Tavria's Gerald of
Informatics and Mathematics), pp. 51-66, (Feb. 2005).
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
120
