
Performance Optimization in Intelligent Manufacturing
Decision Support System for Value Engineering in Flour Mills
Jürg P. Keller
1
and Mukul Agarwal
2
1
Institute for Automation, University of Applied Sciences and Arts Northwestern Switzerland,
Steinackerstrasse 5, 5210 Brugg-Windisch, Switzerland
2
Corporate Technology, Bühler AG, 9240 Uzwil, Switzerland
Keywords: Decision Support Systems, Intelligent Manufacturing, Systems Modelling and Simulation, Discrete-event
Systems, Supply Chain and Logistics Engineering, Production Planning, Quality Control and Management,
Performance Evaluation and Optimization, Human-system Interface, Cost and Value Engineering.
Abstract: The performance of modern flour mills depends crucially on value-engineering decisions involving optimal
mixing of up to 80 intermediate product streams into at most 6 final product streams during continuous
operation. Optimal mixing decision depends on given physical properties and yields of intermediate
streams, goals and constraints on physical properties and yields of final streams, physical and quality
constraints on mixing decision variables, and qualitative judgments relating value of final streams to their
physical properties. In a previous work, the authors presented an interactive tool that guided the production
personnel towards an optimal decision for fractions of each intermediate stream that should be piped to each
final stream. This tool could exploit multiple Linear Programming computations and graphic user-interface
to enable scenario overview and manoeuvring with no perceptible time lag. However, it cannot be used in a
majority of flour mills where each intermediate stream is diverted to a single final stream using physical
flaps. The mixed-integer programming required in this case renders the tool too slow for interactive use. In
this work, a new tool is developed for the prevalent case of discrete decision variables, which enables
computations and graphic interface for scenario manoeuvring without prohibitive time lag.
1 INTRODUCTION
Modern flour mills usually process a mixture of
different wheat grains through about a dozen
processing stages connected in series and parallel. In
each stage, grain particles are ground further and the
resulting particles are separated into various streams,
some of which go on to further processing stages
while some others are withdrawn as intermediate
product streams. This generates about 30 – 80
intermediate streams with different physical
properties and yields. These intermediate product
streams are mixed in continuous operation to
generate a mere 4 – 6 final product streams, which
are stored in product silos and then packed for
shipping.
The decision, how to mix the many intermediate
streams into a few product streams, is crucial for
generation of maximal sales value while accounting
for many constraints on the physical properties and
yields of the final streams, as well as on the mixing
decision variables. Since usually the sales value of
the final streams is not known as a function of their
physical properties, but can only be judged
qualitatively by the production personnel, tools are
needed to guide the decision process by showing
overviews of the compromises involved in the
various scenarios and letting decisions be made
successively and iteratively for each final stream.
This involves prolonged interactive use of the tool
until the final decision is reached. The tool must
therefore not only offer an intuitive and convenient
graphic interface, but also be computationally fast in
order to show scenario overviews and to allow
manoeuvring through scenarios without debilitating
time lag.
In a previous work (Keller and Agarwal, 2012),
the authors presented a tool that solved the above
challenges and was successfully tested in a real flour
mill. The tool dealt with the computational speed by
using multiple Linear Programming optimizations
implemented with an accelerated algorithm.
495
Keller J. and Agarwal M..
Performance Optimization in Intelligent Manufacturing - Decision Support System for Value Engineering in Flour Mills.
DOI: 10.5220/0004431204950504
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 495-504
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

However, this solution is not applicable to a majority
of flour mills where each intermediate stream is
completely diverted to a single final stream, and no
splitting of an intermediate stream to multiple final
streams is possible due to constraints of the physical
flaps installed in the piping. In this work, therefore,
a new tool is developed for the situation involving
integer mixing-decision variables.
For the mixed-integer programming problem at
hand, many well-known algorithms already exist, in
principle. Some of these algorithms are summarized
in Chen et al. (2010). Employing these algorithms to
the problem at hand would mean optimizing up to
480 binary variables (for upto 80 intermediate
streams multiplied by up to 6 final streams). Since,
for binary variables, the Linear Programming
algorithm must be coupled with a Branch-and-
Bound procedure, this high number of binary
variables involves prohibitive computational time.
To circumvent this drawback, the problem is solved
here not for all final streams together, but for one
final stream at a time. This decoupling is feasible
and sensible for the problem at hand, because the
production personnel needs to specify physical-
property constraints for each final stream, and
prefers to do this only by specifying them (and
obtaining results) for one final stream at a time,
starting with the most valuable final stream.
Solving the decoupled problem for one single
final stream is similar to the problem addressed in
recent literature for distributed power-network
operation (Borghetti et al., 2011). The latter,
however, deals only with power as a single “physical
property” and with a-priori known, fixed constraints
for this physical property, whereas the problem at
hand involves up to 6 different physical properties,
and, more importantly, their constraints are not
known and cannot be specified a priori. The main
special feature of the problem at hand is that the user
needs to see the Pareto-optimal solution for all
possible physical-property constraints, so that he can
specify (actually, select) the constraints in an
informed manner, knowing the feasibility and the
influence of his choice on the final solution.
Precisely this special feature makes the use of
existing solutions computationally prohibitive for
the current problem. Computing and displaying all
binary solutions for the entire range of physical-
property constraints would be extremely time
consuming. To circumvent this issue, a new solution
strategy is used in this work that presents to the user
not the binary solutions, but instead a continuous-
solution space for the entire range of constraints.
Computation of the continuous-solution space
involves only Linear Programming, but no Branch-
and-Bound procedure, and is consequently fast. The
user can then conveniently analyse the solution
space and specify a (usually much narrower) range
of feasible constraints that she wants to focus on.
The solution procedure then generates all binary
solutions in the vicinity of the continuous solution.
The new tool circumvents the prohibitive
computational burden for the mixed-integer
programming problem by dividing the problem into
several sub-problems, by exploiting the continuous-
decision-variable solution as an anchor, and by using
an efficient procedure that employs Linear
Programming and Branch-and-Bound methods
intermittently to obtain binary solutions in the
vicinity of the anchor. A special graphic interface is
additionally designed to present flexible overviews
of resulting scenarios to the user. The new tool
allows fast, interactive decision making for the
considerably more challenging situation of discrete
decision variables. The tool was tested successfully
on real plant data.
2 PROBLEM FORMULATION
The production personnel in modern flour mills is
faced with, among others, the following crucial
decision. For each of the 30 – 80 intermediate
product streams withdrawn continuously from the
mill, the personnel has to decide, which of the 4 – 6
final product streams it should be diverted to. In a
majority of flour mills, this is an integer decision
that can take up to 6 values for each intermediate
stream (see Fig. 1).
The following facts render this decision difficult.
All intermediate and final streams are characterized
by identical physical quality parameters, 4 – 6 in
number. These properties are independent of each
other. Each property “mixes” linearly with respect to
the weight fractions. The yields (or flow rates) and
the physical properties of the intermediate streams
are given, whereas those of the final streams depend
on the decision and are subject to various
constraints. For example, a particular final stream
may represent a high-purity flour constrained by an
upper limit on the physical property “ash content”.
Another final stream may have a low yield limit due
to an already known sales to a particular customer,
or a high yield limit due to physical limitations of
piping, silo, or inventory. In addition, the flaps used
to divert an intermediate stream to a particular final
stream may have limitations in that a flap can
physically output only to certain final streams or
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
496
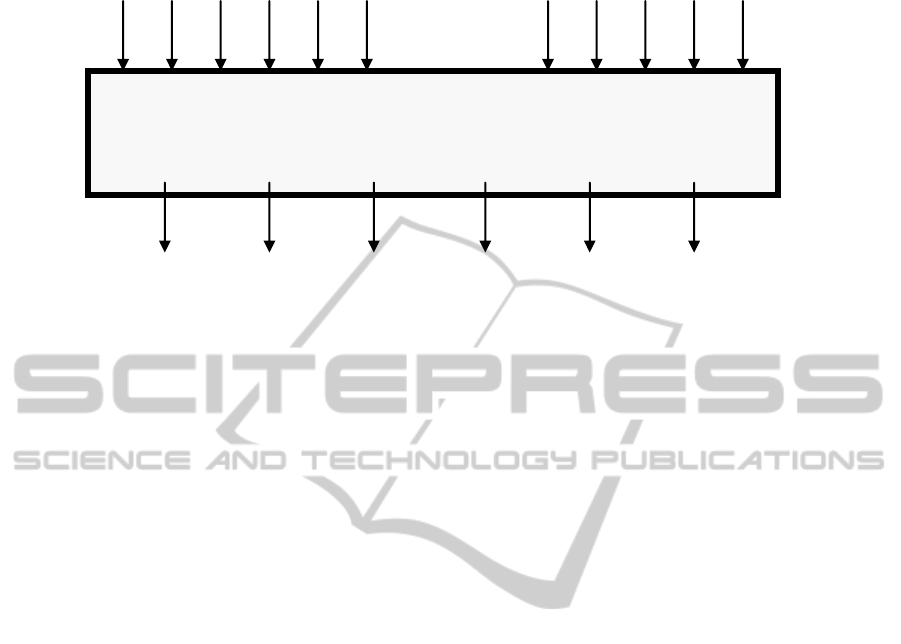
Figure 1: The decision problem.
quality constraints forbid it to output to certain final
streams. The decisions for all intermediate streams,
all final streams, all physical properties, and all
yields are interconnected in a complex way.
The decision making is complicated further by
the fact that, ultimately, the final streams should
have the highest possible sales value, but
characterization of this value is elusive, since the
function relating the sales price to the physical
properties is not fixed, or at least not known. The
user can only judge this value in a qualitative,
comparative way.
Obviously it is not possible even for an expert
personnel to make this decision in a near optimum
way. The decision is therefore usually determined by
on-line trial-and-error based on experience. It is far
from trivial to develop an appropriate decision-
support tool for this decision, since the tool must
optimize possible solutions for the entire range of
goal specifications, present all options and
compromises to the decision-maker in facilitating
overviews allowing for multiple dimensions,
conserve maximum flexibility for further steps while
making decisions in a particular step, and recompute
and redisplay all outputs without prohibitive time lag
when any user-input is changed.
A tool for supporting the above decision faces
several challenges.
1. Qualitative Judgement of Value: Since the value
of flours cannot be formulated explicitly as a
function of the flour properties and yields, a
decision-support tool cannot simply output a
unique optimal answer. Instead, the tool must
present all non-inferior outcomes and
compromises.
2. High Dimensional Space: Since large numbers
of properties, yields, intermediate streams and
final streams are involved in the decision-
making, the resulting high dimensionality is
challenging for the tool not only
computationally, but also in view of the 2D
graphic interface.
3. Need for Quick Reaction: The entire decision-
making with the support of the tool involves
scores of clicks and inputs from the user, while
each time the user appraises the tool output
before making the next click or input. The tool
must therefore respond within 15 – 20 seconds
after each click or input, so that the new result is
quickly visible for appraisal. Even then, the user
needs dozens of minutes of interactive use to
arrive at the complete final solution.
3 SOLUTION PROCEDURE
In principle, for the given problem, the tool must
calculate and display all discrete non-inferior
solution points, covering all intermediate and final
streams simultaneously. This is a formidable task
that would require unimaginably high computation
time, even using super computers.
3.1 Solution Strategy
A new solution strategy is developed that avails
itself of several accelerating improvements, so as to
achieve computation times of 15 – 20 seconds for
displaying the needed results.
Decision:
Each intermediate stream should be directed to which final stream?
Goal:
Maximize final stream value under a-priori unknown constraints.
_ _ _ _ _ _
30 – 80 intermediate streams with known properties & yields.
4 – 6 final streams with a-priori unknown properties and yields
that are determined interactively between the user and the tool.
PerformanceOptimizationinIntelligentManufacturing-DecisionSupportSystemforValueEngineeringinFlourMills
497
3.1.1 Stepwise Decision for each Final
Stream
The decision in the above mixed-integer problem
involves up to 80 decision variables (one for each
intermediate stream), each of which can take up to 6
discrete values (one for each final stream). The
mixed-integer problem is broken down to up to 6
sub-problems (one for each final stream). In each
sub-problem, each of the up to 80 decision variables
can take only 2 discrete values (yes/no, indicating
whether that intermediate stream is directed to the
sub-problem final stream or not). The massively
complex mixed-integer problem is thus reduced to a
few much simpler, mutually decoupled binary
problems. The consequence of this reduction is that
the decisions for each final stream can be made only
successively, and not all at once.
It turns out that, as in the previous work (Keller
and Agarwal, 2012), this poses no limitation for the
user, but is indeed in line with what the user would
prefer anyway. Due to the complexity of the given
problem, the user cannot simultaneously make
decisions for all final streams, even with the help of
a tool. The decision-making is therefore preferably
performed in steps, one step for each final stream,
usually beginning with the most valuable flour
stream and ending with the least valuable. The above
problem reduction allows the user to make a step
decision based on the results of previous step
decisions, as well as to revert to and re-adjust a
previous step decision.
3.1.2 Continuous Solution as Anchor
Even for a reduced sub-problem (for a single final
stream) as stated above, the number of possible
combinations of all binary decision variables is
formidably large. Computing all non-inferior
combinations for a sub-problem is therefore not
practical. A further insight into the problem leads to
a considerable relief in this respect.
Even a cursory reflection of the problem reveals
that the final solution of the binary-variable problem
must lie close to the solution of the continuous-
variable problem in the decision-variable space. This
holds not only from the process point-of-view, but
also from the viewpoint of the user. From the
process aspect, a unique optimal solution does not
even exist a priori, since the judgment of “value” is
merely qualitative and comparative, but not
absolute, i.e. the “optimal” solution is essentially
chosen by the user as a best-judged compromise.
From the user viewpoint as well, it is easier to first
“choose” a continuous solution, and then choose an
implementable binary solution in its vicinity.
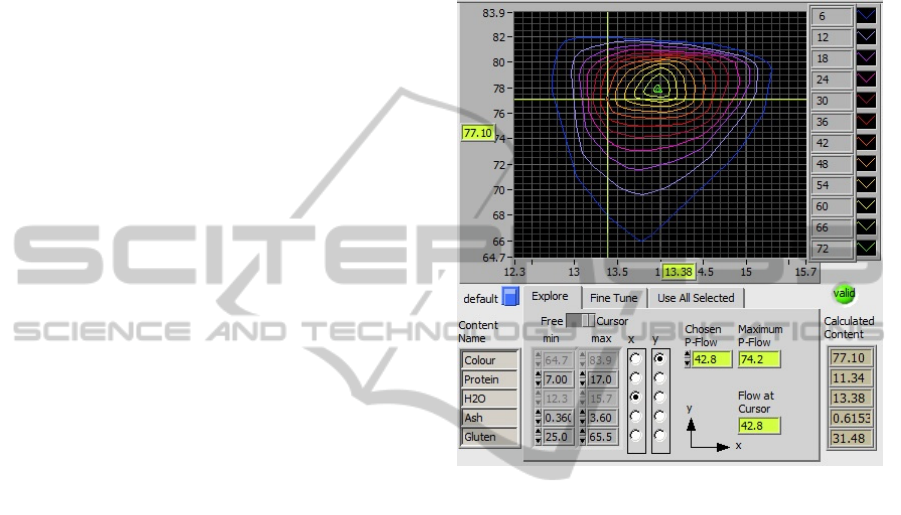
The solution strategy thus lets the user first select
a sub-problem solution in the continuous space, as in
the previous work (Keller and Agarwal, 2012). Fig.
2 shows an example selection from the previous
work.
Figure 2: An example of the selection of a solution point
by the user in the continuous decision space (Keller and
Agarwal, 2012). (Figures 2 and 4 show realistically
created artificial data for illustration, since the actual
industrial data used for the tests is classified.)
The solution strategy in the current work thus
can use the selected point in the continuous space as
an anchor, and needs to merely compute all non-
inferior binary solutions in a reasonable vicinity of
this point. The computational burden is reduced
considerably through this anchoring, but is still
exorbitant.
3.1.3 Linear Programming with Relaxation
and Branch-and-Bound
The problem of finding binary solution points in the
vicinity of the continuous solution anchor point is
not amenable to Linear Programming (LP) solely,
since the latter delivers continuous values for the
decision variables. Finding binary points in the
vicinity would involve setting each continuous-value
decision variable to either 0% or 100%. This gives a
set of branches, for each of which another LP
problem with fewer decision variables is solved. The
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
498
branches with significantly poorer result than the
anchor are terminated, and in the remaining
branches the decision variables with continuous
values are set again to 0% and 100%, creating the
next set of combinatorial branches. This Branch-
and-Bound procedure, coupled with an LP solution
at each branch, and subsequent reduction in the
number of decision variables in each branching
stage, is repeated until no more branches are left.
The above procedure is still computationally
prohibitive, since the LP solutions at each branch
continue to involve a large number of decision
variables with continuous values. This large number
represents the number of basic variables in the LP
problem and equals the number of properties
involved plus one yield (i.e. up to 7). The solution
strategy therefore resorts to a relaxation method that
introduces auxiliary relaxation variables that can
take continuous values by becoming basic variables,
thereby relieving (at least) a corresponding number
of decision variables, which in turn become non-
basic, take a discrete 0-or-1 value, and lead to no
new branches. In practice, it was noticed that, when
yield is included as a relaxation variable, a
significantly higher number of decision variables is
“relieved” in this way, since not only the auxiliary
relaxation variables, but also several other auxiliary
variables in the LP formulation then become basic
variables.
The relaxation can be introduced for yield and/or
property variables, and allows that the value of these
variables in the anchor can be violated to a certain
extent. This “extent” can be specified with certain
weights, which could be optimized or selected by
trial-and-error. Two cases were tried in this work:
relaxation of yield only, and relaxation of yield as
well as all properties. In the first case, the relaxation
weights could easily be set by trial-and-error, since
their value is not very sensitive with respect to the
final result. In the latter case, however, setting the
relaxation weights for the properties is much more
difficult, not only because of the higher number of
coupled weights involved, but more so because the
choice of these weights is extremely sensitive with
respect to the final result. This solution avenue was
therefore dropped in favour of relaxation only with
respect to yield.
The above relaxation procedure is a variation of
the relaxation methods reported in the literature
(Guan et al., 2003; Lee et al., 2009). In these
methods, the Lagrangian relaxation weights serve to
penalize the constraint violation, i.e. for the problem
at hand, it would penalize the deviation of the yield
and property values from the anchor values. In the
procedure used above, the relaxation weights serve
to reduce the number of decision variables that come
out to be basic variables and consequently lead to
new branches.
3.2 Definitions
n
F
number of intermediate streams
n
P
number of final streams
n
k
number of properties
i
index for intermediate streams
p
index for final streams
k
index for properties
c
i
cost of i-th intermediate stream
r
k
weighting factor for scaling of k-th
property
F
i,p
yield of i-th intermediate stream that is
directed to the p-th final stream
F
i,max
maximum yield of i-th intermediate
stream that is available
P
p
yield of p-th final stream
P
p,
d
increment for p-th final stream
w
k,i
weight fraction of k-th property in the
i-th intermediate stream
X
k,p
weight fraction of k-th property in the
p-th final stream
X
d
weight fraction of properties in P
p,d
S
r
matrix to select streams optimized
using LP in the mixed-integer problem
S
f
matrix to select streams with fixed
given values that are not optimized
n
f
number of streams with fixed given
values that are not optimized
V
vector with fixed given values for
streams selected using
S
f
.
(0 = not used, 1 = used)
z
i
fraction of a selected stream,
i
z0,1
with 0 = not used and 1 = used.
PerformanceOptimizationinIntelligentManufacturing-DecisionSupportSystemforValueEngineeringinFlourMills
499

In addition, let:
k,i w F
k,p k p P k,p k
pi,pF
T
m
Ww,nn
X x ,n n ,X x ,n 1
FF,n1
111 1,m1
(1)
3.3 LP Formulation for Splittable
Intermediate Streams
For the p-th final stream, the basic LP-problem with
splittable intermediate streams can be formulated as
follows:
F
F
ppp
T
np p
T
p
n
p
p
p
p,i i,max
ip,i
i
Pp
WF X P
1F P
P
1
als Matrix : F
XP
W
0F F ,i
JcF
F: argmaxJF
(2)
Here, the objective function J is represented as a cost
criterion for intermediate streams. The cost factors c
i
can thereby represent either actual costs of these
flours or the strength of the user's a-priori
preference for wanting to use a particular
intermediate stream.
ik,pk,ik
k
cxwr
(3)
The above formulation is completely defined and
solvable when the yields and properties of the final
streams are predefined. But as mentioned above, this
is not the case here.
For the mixed-integer optimization in the present
situation, it is necessary to redefine the LP
formulation such that intermediate streams that are
predefined to be zero or F
i,max
get removed a priori.
p,r r p
p
,f f p
FSF
FSVF
(4)
Here S
r
selects streams that can be varied in the
range 0 to F
i,max
, and S
f
selects streams that are set
to 0 or F
i,max
depending on the value 0 or 1 in the
vector V. The LP formulation then becomes:
k
F,r F,f
rp
TT
rPn p,minp ff max
p
rp
TT
npnfmax
p
p,i i,max
pp,max
ip,i
i
rp p rp p
SF
WS PI X P WS S V F
X
SF
10 P1SVF
X
0F F ,i
0X X
JcF
SF X : argmaxJ SF X
(5)
or in matrix form:
F,r
F,f
k
T
T
n
pn f max
rp
T
T
p
rPn
p,min p f f max
p,i i,max
pp,max
ip,i
i
pp pp
10
P1 SVF
SF
X
WS P I
XPWSSVF
0F F ,i
0X X
JcF
FX:argmaxJFX
(6)
3.4 LP Formulation with Relaxation
The above formulation now needs to be modified to
include relaxation for yield, so as to force the
streams to be close to 0 or 100% of the intermediate
stream yield (see section 3.1.3). This is achieved by
allowing certain tolerances in the constraints. From
LP perspective, this creates additional basic
variables, such that the streams will take only
discrete values at either the upper or the lower
bound. For this purpose, define:
F
i
= z
i
*F
i,max
pp,sollp, p,
PP P P
(7)
where P
p,soll
represents a given minimal yield that
must be reached and P
p,+
and P
p,-
represent relatively
small corrections to it. The latter appear in the
formulation as products with the property weight
fractions, leading to a bilinear optimization problem.
In order to avoid this bilinearity, the property weight
fractions in these cross-terms should be fixed. This
can be achieved by iterating the values of the
property weight fractions starting from the anchor
value.
The following LP formulation then results:
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
500

k
max F,f
r
p
T T
max,diag r P,soll n d d p, min p,soll f f max
p,
p,
r
p
T
TT
rp,sollnfmax
p,
p,
i
pf p,max
p, max p, m
Sz
X
WF S P I X X X P WS S V F
P
P
Sz
X
FS 0 11 P 1 S VF
P
P
0z 1,i
0X X
0P P,0P P
ax
i i,max F, p, F, p,
i
r p p, p, r p p, p,
JczF P P
S z X P P : arg max J S z X P P
(8)
or in matrix form:
F,fmax
k
r
T
TT
p,min n f maxr
p
T
T
p,
d
max,diag r P, min n d
p, min p , min f f max
p,
p f p, max
p,d max
r
T
p
T
max r F, F ,
p,
Sz
P1SVFFS 0 1
X
1
P
X
WF S P I X
XP WSSVF
P
0z1,i
0X X
0P P
Sz
X
JcFS0
P
T
T
max m m
p,
rpp,p,
cF SSz
P
S z X P P : arg max J
(9)
3.5 Mixed-Integer Procedure for
Non-Splittable Intermediate
Streams
In the proposed solution procedure for the mixed-
integer problem at hand, the solution to the LP
problem in Eq. 9 is taken as the anchor starting point
to search for binary variable solutions in its vicinity.
The above LP problem comprises n
p
+3 equations
and n
F
-n
f
+2 variables that determine the split of the
intermediate streams. The chosen form for the
solution of this LP problem generates additional
n
p
+3 auxiliary variables based on the number of
equations. When the LP problem has been solved,
out of all variables precisely n
p
+3 variables emerge
as basic variables and take values that do not lie on
the constraints. If one of these n
p
+3 basic variables
belongs to the set z
i
, then the corresponding
intermediate stream gets split.
Since this split is not acceptable for the mixed-
integer problem at hand, a combination with the
Branch-and-Bound method is used. Branch-and-
Bound methods have a long history (Lawler and
Wood, 1966) for solving mixed-integer problems not
only in conjunction with Linear Programming using,
e.g., rules (Hansen et al., 1992) or heuristics
(Wolsey, 1980), but also for quadratic (Vielma et al.,
2008) and nonlinear (Leyffer, 2001) problems.
Using the Branch-and-Bound method for the
problem at hand, when one or more of the n
p
+3 basic
variables belong to the set z
i
, then several new LP
problems are generated using all possible integer-
value (0 or 1) combinations as a-priori fixed values
of these variables. All these LP problems are then
solved, and those branches are discarded that lead to
a considerably poorer objective-function value than
the source-branch LP solution. Generation of further
LP problems with new branching ends when all
branches get discarded.
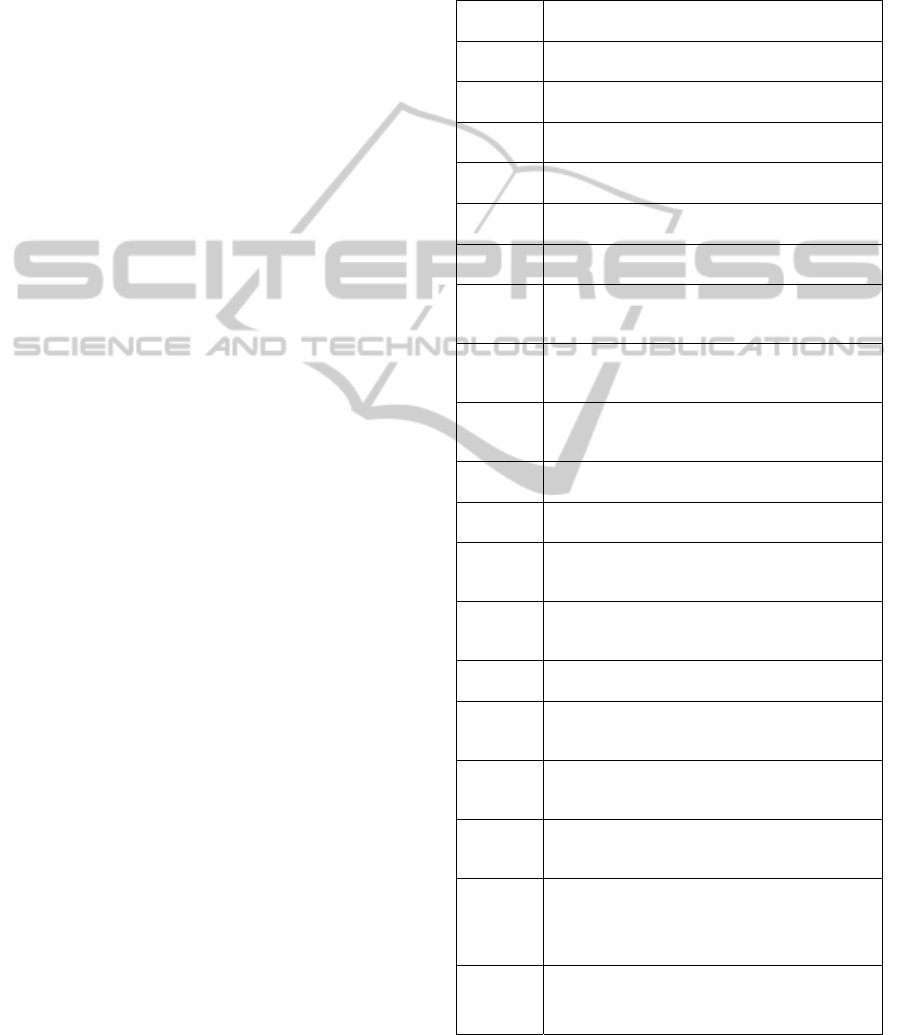
3.6 Formal Solution Procedure
The above procedure is formalized as follows.
Analogous to the definition of S
r
and S
f
, define I
r
and I
f
as sets of indices for streams that are
optimized and that are fixed, respectively, and I as
the set of indices for all streams. Define
corresponding vectors z
r
and z
f
indicating fractions
of the intermediate stream that go into a final stream.
The vector z
f
containing fixed streams thus only
comprises values 0 and 1, whereas the vector z
r
starts out with real values and approaches the values
0 or 1 during the optimization.
Let the kth mixed-integer LP problem, LP
m,k
,
determine z
r
, I
r
, and the objective function value as:
(z
r,k
, I
r,k
, J
m,k
)
= LP
m,k
(z
f,k
, I
f,k
)
In the resulting vector z
r,k
, the indices for which the
value is not 0 or 1 form an index set I
r,k
. Next, all
(0,1)-combinations are determined for each z
r,k,i
with
i I
r,k
. This generates a set of vectors Z
p,k
that must
then be combined with the corresponding fixed-
value vector z
f,k
, together with its associated index
set I
f,k
. The result is a set L
k+1
of pairs (z
f,k+1
, I
f,k+1
)
for z
f,k+1
Z
p,k
z
f,k
and I
f,k+1
= I
r,k
I
f,k
. Each of
these pairs is then solved as an independent LP
problem.
This procedure is repeated until all intermediate
streams take only the values 0 or 1, i.e., until I
f,k+1
comprises indices for all intermediate streams.
A flow diagram for the procedure is shown in
Fig. 3. During the computation, the size of the set L
is shown to the user, and the user can adjust the sub-
optimality parameter to influence the number of
solutions that would be generated.
4 GRAPHIC INTERFACE
The graphic interface must present all options and
compromises to the user in facilitating overviews.
The user begins with a search in the continuous-
PerformanceOptimizationinIntelligentManufacturing-DecisionSupportSystemforValueEngineeringinFlourMills
501
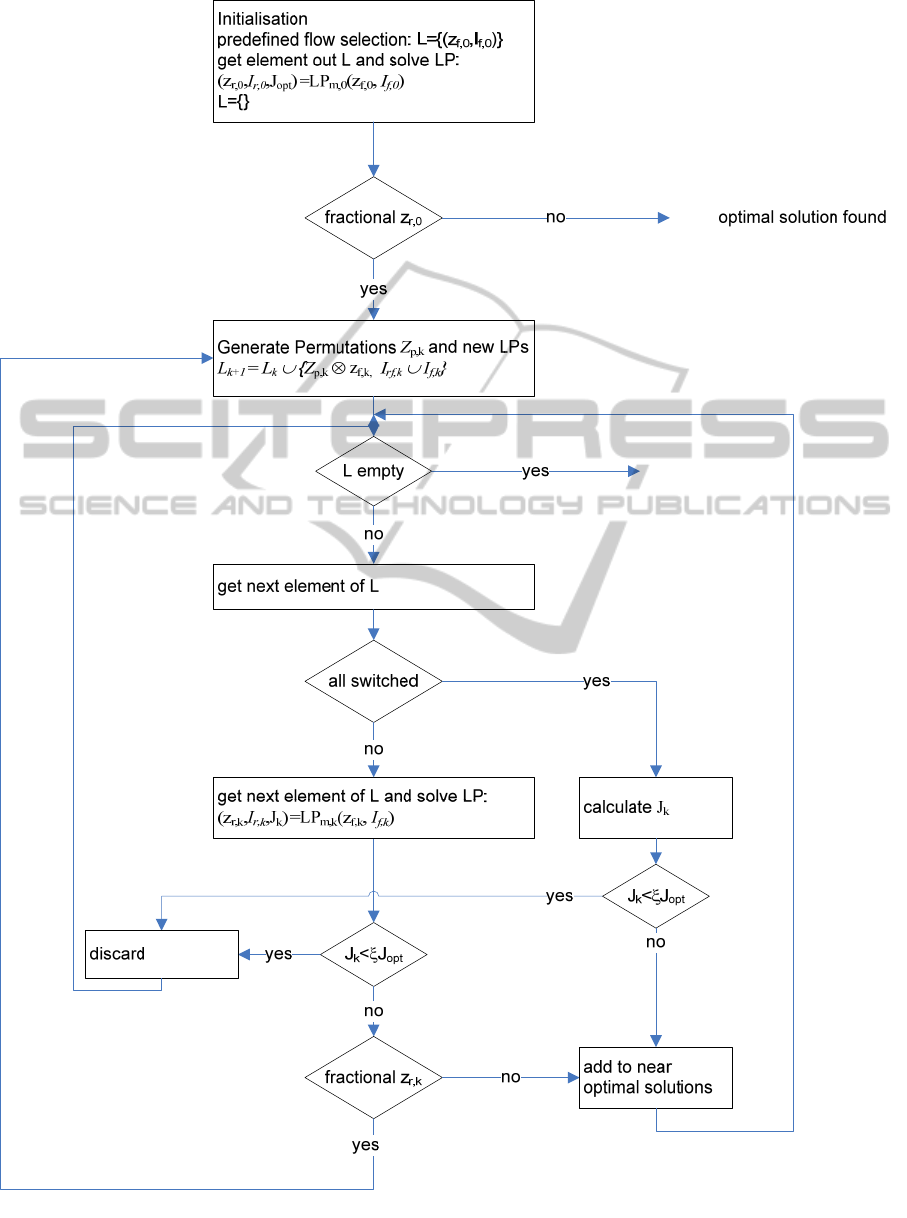
Figure 3: Schematic flow diagram for the mixed-integer search procedure.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
502
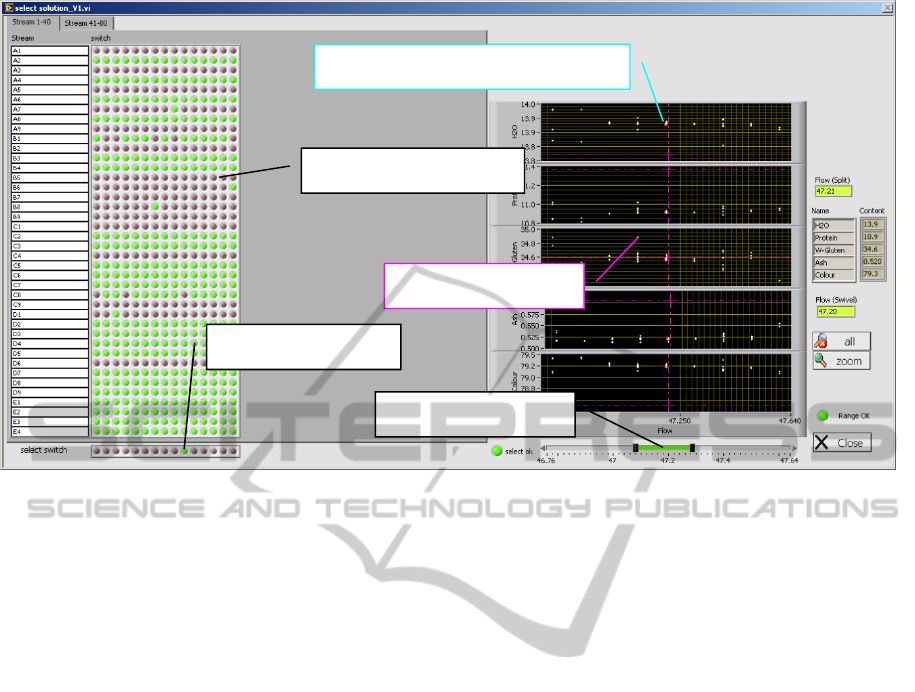
Figure 4: Graphic interface for integer solutions in the vicinity of the anchor continuous solution.
solution domain in order to specify an anchor, for a
particular selected final product stream. This search
is guided by well-structured graphic overviews and
flexible input possibilities as shown in the previous
work (Keller and Agarwal, 2012). After a
continuous-solution anchor has been selected for the
final product stream, the user clicks a button to
switch to the integer-solution mode, which
calculates and displays the mixed-integer solutions
in the vicinity of the anchor continuous solution,
using the solution procedure described above.
The user interface for displaying these results is
shown in Fig. 4. Since slightly sub-optimal solutions
might get prefered by the user based on
considerations not available in the above problem
formulation, and since several near-optimal
solutions might yield objective-function values quite
close to each other, the tool displays all such results
in a convenient overview, and allows the user to
flexibly and comfortably select the particular
solution that is best in view of the other
considerations.
On the left-hand side of the graphic interface in
Fig. 4, the user sees, for the particular final product
stream at hand, which intermediate product streams
would be used (value 1, colour green, shade light
gray) and which would not be used (value 0, colour
red, shade dark gray). Each relevant solution is
thereby shown in a single column. At the bottom of
this part of the display, the user can provisionally
select one particular solution by clicking it green (or
shade light gray).
On the right-hand side of the graphic interface,
the user sees, for the various solutions, the values of
the physical properties versus the yield of the final
product stream at hand. Thereby, the solution
selected on the left-hand side, as well as the anchor
solution (as intersecting dash-dotted lines), are
highlighted for easier judgment. At the bottom of
this part of the display, the user can select a range of
yields in order to narrow down the number of
solutions that are displayed on the left-hand side.
5 RESULT
Tests in industrial cases confirmed that the tool
fulfils the requirements of ease-of-use and
flexibility. The results shown in the overview
graphics were judged by the users as extremely
useful. A decisive factor for the positive judgment
by the users and their eagerness to use the tool was
the relative quick reaction time of the computation
in the range of 10 – 20 seconds, whenever the
user klicks the button for computing discrete
solutions around the continuous-solution anchor,
and
without any perceptible delay, whenever the user
changes any other input.
Compared to the manual decision making, the
tool-supported decision showed a value increase of
Selected solution
Selection of streams
Physical property for chosen solution
Selected yield range
Spli
t
-mode solution
PerformanceOptimizationinIntelligentManufacturing-DecisionSupportSystemforValueEngineeringinFlourMills
503

about 5%, which is considerable in this industry.
6 CONCLUSIONS
A novel decision-support tool is presented that
solves the problem of optimally allocating each of
many intermediate product streams in flour mills to
one of a few final product streams, while accounting
for uncorrelated physical properties of the streams,
a-priori unknown properties and yields of the final
product streams, and the lack of explicit formulation
of "value" of the final product streams with respect
to their physical properties. A fast solution strategy
is developed that decouples the original problem into
simpler problems for each final product stream, uses
a fictitious continuous-space solution as an initial
facilitating anchor, and computes several integer
solutions in the vicinity of the anchor by combining
Branch-and-Bound with multiple Linear
Programming steps complemented by a relaxation
scheme. The developed optimization solution
enables display of results without annoying time lag,
whenever the user changes any input in the user-
interface.
In many mills, the relevant physical properties of
the intermediate and the final product streams may
include properties that do not “mix” linearly. The
linearity with respect to the physical properties is a
fundamental assumption in the above solution
procedure, so that the tool cannot be used in cases
where one or more properties “mix” nonlinearly.
Fundamentally different solution procedures have
been devised and implemented for this situation, and
are currently being tested and refined.
REFERENCES
Borghetti, A., Paolone, M., Nucci, C. A., 2011. A Mixed
Integer Linear Programming Approach to the Optimal
Configuration of Electrical Distribution Networks with
Embedded Generators, 17th Power Systems
Computation Conference, Stockholm, Sweden.
Chen, D.-S., Batson, R. G., Dang, Y., 2010. Applied
Integer Programming: Modeling and Simulation, John
Wiley & Sons, Inc., New York, NY.
Guan, X., Zhai, Q., Papalexopoulos, A., 2003.
Optimization Based Methods for Unit Commitment:
Lagrangian Relaxation versus General Mixed Integer
Programming, IEEE Power Engineering Society
General Meeting, 2(4), 2666.
Hansen, P., Jaumard, B., Savard, G., 1992. New Branch-
and-Bound Rules for Linear Bilevel Programming,
SIAM J. Sci. and Stat. Comput., 13(5), 1194-1217.
Keller, J. P., Agarwal, M., 2012. Fast, Flexible, Interactive
Decision-Support Tool: An Industrial Application, 8th
International Symposium on Intelligent and
Manufacturing Systems, Adrasan, Turkey.
Lawler, E. L., Wood, D. E., 1966. Branch-and-Bound
Methods: A Survey, Operations Research, 14(4), 699-
719.
Lee, M. L., Kim, J.-G., Kim, Y.-D., 2009. Linear
Programming and Lagrangian Relaxation Heuristics
for Designing a Material Flow Network on a Block
Layout, International Journal of Production Research,
47(18), 5185-5202.
Leyffer S., 2001. Integrating SQP and Branch-and-Bound
for Mixed Integer Nonlinear Programming,
Computational Optimization and Applications, 18,
295-309.
Vielma J. P., Ahmed S., Nemhauser G. L., 2008. A Lifted
Linear Programming Branch-and-Bound Algorithm
for Mixed Integer Conic Quadratic Programs,
INFORMS Journal on Computing, 20, 438-450.
Wolsey, L. A., 1980. Heuristic Analysis, Linear
Programming and Branch and Bound, Mathematical
Programming Studies, 13, 121-134.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
504
