
Creating Metric-topological Maps for Large-scale Monocular SLAM
Eduardo Fernández-Moral, Javier González-Jiménez and Vicente Arévalo
Departamento de Ingeniería de Sistemas y Automática, University of Málaga, Bulevard Louis Pasteur 35, Málaga, Spain
Keywords: Monocular SLAM, Metric-topological Map, Map Partitioning.
Abstract: In the last very few years, monocular SLAM approaches based on bundle adjustment are achieving amazing
results in terms of accuracy, computational efficiency, and density of the map. When such solutions are
applied on large scenarios it is crucial for the system scalability to maintain a map representation that
permits efficient map optimization and augmentation. In order to cope with such large maps, we present an
on-the-fly partitioning technique which allows abstraction from the metric map to operate more efficiently.
The result is a metric-topological arrangement where the areas with highly-connected observations are
grouped in submaps weakly interconnected to each other. This is accomplished by progressively cutting a
graph representation of the map, where the nodes are keyframes and the arcs between them represent their
shared observations. The experimental results indicate that the proposed approach improves the efficiency
of monocular SLAM and provides a metric-topological world representation suitable for other robotic tasks.
1 INTRODUCTION
Monocular SLAM is an appealing way of solving
the localization and mapping problem in mobile
robotics because cameras are inexpensive, compact,
easy to calibrate and consume low power. During
the last years monocular SLAM has advanced
notably with the use of parallel processing and
efficient algorithms for data association and map
optimization. It has made possible that current state-
of-the-art approaches can operate accurately in some
large scale scenarios, facilitating its application in a
wide range of areas such as augmented reality, scene
reconstruction and, particularly, mobile robotics.
The increasingly larger maps that are now
possible with monocular SLAM are fundamental to
cope with a wider range of real autonomous robotics
applications. Such ability to operate in large scale
brings the need of appropriate strategies for
managing the map. Applying abstraction (as humans
do) is an effective way of dealing with the huge
amount of detail present in large metric maps. The
result of such abstraction process is the so-called
metric-topological map, consisting of a two-layer
representation, one containing pure geometrical
information and a second one containing higher
level symbolic information (Thrun, 1998).
The benefit of a metric-topological arrangement
is twofold: on the one hand, it offers a natural
integration with symbolic planning that permits a
robot to reason about the world and to execute high
level tasks (Galindo et al., 2005; Segvic et al., 2009).
On the other hand, the efficiency and scalability of
the SLAM process itself are improved by limiting
the scope of localization and mapping to the region
of the environment where the robot is operating.
Also, loop closure and relocalisation can be more
efficiently solved using topological information
(Savelli and Kuipers, 2004; Angeli et al., 2009;
Fernández-Moral et al., 2013).
In this work, we present an online submapping
technique which creates a topological representation
of the world from the metric map being built by a
monocular SLAM technique. The key idea of our
proposal is to cluster in the same submap those
keyframes with higher observation overlap. This
presents some important advantages over other
approaches (as it will be explained latter on). The
generated map consists of a topological structure
composed of nodes representing local metric maps
and arcs representing relative geometric
transformations among the so-called submaps. In
this paper, we will focus on the benefits of such a
hybrid map for improving the efficiency and
scalability of conventional (metric) monocular
SLAM, concretely PTAM (Klein and Murray,
2007).
Next, we discuss some relevant related work and
39
Fernández-Moral E., Gonzalez-Jimenez J. and Arévalo V..
Creating Metric-topological Maps for Large-scale Monocular SLAM.
DOI: 10.5220/0004438900390047
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 39-47
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

explain in detail the advantages of our approach.
We then describe our partitioning procedure and
show how it is combined with the SLAM process
(PTAM). The experiments and its results are
presented next, and finally, we expose the
conclusions of our work.
2 RELATED WORK
2.1 Construction of the Metric Map
Many solutions have been presented to build metric
maps with monocular SLAM since Davison
(Davison, 2003) presented the first real-time solution
for the problem in 2003. Two main strategies have
been applied since then: Bayesian filtering
(following the work of Davison) and Bundle
Adjustment (BA) on keyframes, as introduced in
(Klein and Murray, 2007). The latter represents the
base for the current state of the art since it allows
handling denser maps and generally offers a better
ratio accuracy/cost (Strasdat et al., 2010).
BA, traditionally used as an offline method for
Structure from Motion (SfM), is now widely used in
visual SLAM thanks to the introduction of parallel
processing and efficient algorithms which exploit
the sparse structure of the problem. Its application to
visual SLAM was inspired by real time visual
odometry and tracking (Nistér et al., 2005), where
the most recent camera poses where optimized to
achieve accurate localization. In such line, PTAM
selects keyframes and applies BA in a fixed size
window, around the last keyframe incorporated, to
obtain good metric maps and accurate localization.
Then, once the local optimization is performed, a
low priority global BA is run to improve the map
consistency. This approach is extended in (Holmes
et al., 2009) by combining it with relative bundle
adjustment - RBA - (Sibley et al., 2009), allowing
fixed-time, consistent exploration. An improvement
of the latter to exploit the problem' sparse structure
was recently presented by (Blanco et al., 2013).
The work of (Strasdat et al., 2011) is also related
to RBA, they propose a double window
optimization: a first window as in PTAM and a
second one including the periphery of the first to
improve consistency by optimizing a pose-graph.
Despite the impressive results obtained, such unique
map solution has intrinsic limitations for managing
maps of real large environments. To avoid such a
limitation, we propose a topological arrangement in
local metric maps.
2.2 Dividing the Map
Map division has been addressed in a number of
works. Some relevant examples are: the Atlas
framework (Newman et al., 2003), where a new
local map is started whenever localization performs
poorly in the current local map, or the hierarchical
SLAM presented in (Estrada et al., 2005), where
sensed features are integrated into the current local
map until a given number of them is reached.
However, none of these provides a mathematically
grounded solution based on the particular perception
of the scene.
In (Eade and Drummond, 2007), the map is
divided in nodes where the landmarks are
represented in a local coordinate frame and, these
landmarks are updated using an information filter.
This method uses the common features between
adjacent nodes to calculate their relative pose. A
different approach called Tectonic-SAM (Ni and
Dellaert, 2007) uses a “divide and conquer”
approach with locally optimized submaps in a
Smoothing and Mapping framework (SAM). This
approach is improved in (Ni and Dellaert, 2010) to
build a hierarchy of multiple-level submaps using
nested dissection.
Other works employ “graph cut” to divide the
map according to a measurable property of the map
observations. On that mathematical sound basis,
(Zivkovic et al., 2005) addresses the problem of
automatic construction of a hierarchical map from
images; (Blanco et al., 2008) generates metric-
topological maps using a range scanner, and
generalizes the approach for other sensors; and
(Rogers and Christensen, 2009) splits the map
within a Bayesian monocular SLAM framework to
reduce the problem complexity.
Our method, which also relies on graph cut,
differs from the above works in the way the graph is
constructed, which is specifically tailored for BA-
based monocular SLAM. Our approach resembles
also the stereo-SLAM framework of (Lim et al.,
2011) who divide the map keyframes into groups
(called segments) according to their geodesic
distances in the graph. On the contrary, our map
partitioning is independent of the keyframe
positions, and is only based on observations
acquired from the scene. Concretely, the map is split
where there are less shared observations, minimizing
the loss of information and therefore, enforcing the
coherency and consistency of the submaps.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
40

3 MAP PARTITIONING
Splitting a map into locally metric consistent and
globally coherent regions provides some relevant
advantages for SLAM. Next, we explain the benefits
of such map structure (subsection 3.1), and describe
our proposal to obtain this metric-topological
arrangement of the map (subsection 3.2).
3.1 SLAM Improvements through
Hybrid Mapping
The advantages of applying a coherent map partition
in monocular SLAM are diverse: a) all the metric
data in each submap can be referred to a local
coordinate system, what reduces error accumulation
and numerical instability; b) localization can be
achieved more efficiently since only those map
points in the nearer regions are reprojected to
estimate the camera position; c) this map structure
permits to approximate the global BA by the
individual optimization of the different submaps,
thus reducing the computational cost of the
optimization process. This last advantage is of
special relevance due to the demanding nature of
BA, whose complexity ranges from linear to cubic in
the number of keyframes depending on the particular
point-keyframe structure (Konolige, 2010). Next, we
explain the details of this approximation for the
global optimization.
Having a map of n landmarks obtained from
observations at m keyframes, bundle adjustment can
be expressed as
n
i
m
j
ijijij
dv
ij
11
2
,
)),,((min xbaQ
ba
(1)
where
d(x,x’) denotes the Euclidean distance between
the image points represented by vectors x and x’,
a
j
is the pose of camera at keyframe j and b
i
the
position of landmark i,
Q(a
j
,b
i
) is the predicted projection of landmark i
on the image associated to keyframe j,
x
ij
represents the observation of the i-th 3D
landmark on the image of keyframe j and,
v
ij
stands for a binary variable that equals 1 if
landmark i is visible in keyframe j and 0
otherwise.
Let’s now consider that the map is divided into N
submaps, each submap, say k, containing m
k
keyframes and n
k
landmarks, with k = {1,…N}.
Then, (1) can be rewritten as
N
k
N
l
n
i
m
j
kl
ij
k
i
l
j
kl
ij
kl
k
i
l
j
dv
11 1 1
2
,
)),,((min xbaQ
ba
(2)
where the combination of subscript i and superscript
k refers to the i-th landmark of the k-th submap (e.g.,
b
i
k
), and similarly l over j refers to the j-th keyframe
of the l-th submap (e.g., a
j
l
). Taking into account the
observations shared between submaps, this
expression can be written as
B
n
i
m
j
kk
ij
k
i
k
j
kk
ij
N
k
A
N
kl
l
n
i
m
j
kl
ij
k
i
l
j
kl
ij
kk
kl
k
i
l
j
dv
dv
1
2
1
111
2
1
,
)),,((
)),,((min
xbaQ
xbaQ
ba
(3)
where the term A stands for the reprojection error of
those landmarks observed from keyframes of
different submaps and the term B corresponds to the
reprojection error of those landmarks observed form
keyframes within the same submap. Both concepts
are illustrated in figure 1.b. The first establishes the
inter-connection between submaps which is
represented by arcs connecting keyframes of
different submaps (e.g. arc linking KF-2 and KF-11)
and the second sets the intra-connection of the
submap which includes the submaps’ inner arcs (e.g.
arc linking KF-1 and KF-2).
If we are able to divide the map in such a way
that the different submaps have few common
observations, and assuming that the reprojection
errors are independent of the map division, then A
becomes negligible with respect to B. Thus, the
global optimization can be approximated by
N
k
n
i
m
j
ijijij
kk
k
i
k
j
dv
111
2
,
)),,((min xbaQ
ba
(4)
This approximation is equivalent to optimize
each submap independently, which leads to a
significant reduction of computational burden. In
fact, this approximation is equivalent to the original
expression (1) when there are no connections
between submaps.
CreatingMetric-topologicalMapsforLarge-scaleMonocularSLAM
41
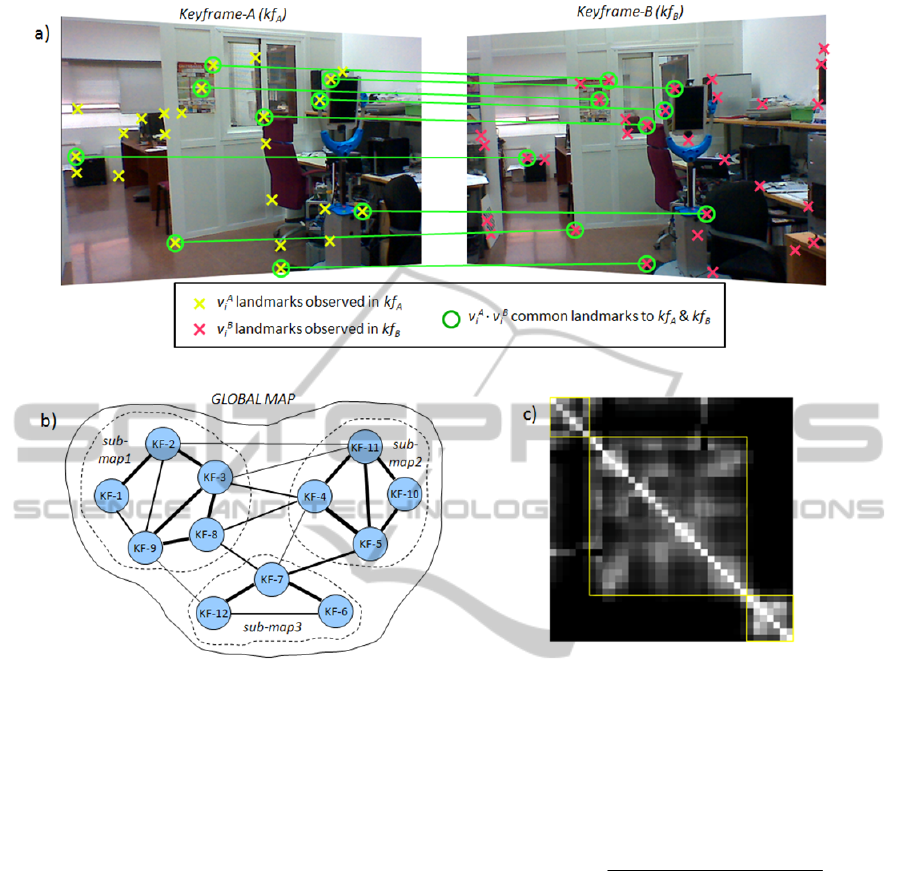
Figure 1: a) Common observations between two keyframes. This is used to calculate the Sensed Space Overlap (SSO) (see
equation 5). b) Graph-representation of the map where each node represents a keyframe and the arcs are weighed with the
SSO calculated between keyframes (thicker arcs mean higher SSO). c) Example of SSO matrix, in which the brightness of
the element ij represents the SSO between the keyframes i and j.
3.2 Map Partitioning Method
The approach proposed here to divide the map into
coherent regions consists in grouping together those
keyframes that observe the same features from the
environment. For that, we consider the map as a
graph whose nodes represent keyframes and the
weight of the arcs are a measure of the common
observations between them. There are two critical
issues in this partitioning approach: first, the
computation of the arc weights; and second, the
criterion adopted to perform the partition itself.
As for the first, the arc weights are assigned
according to the Sensed-Space-Overlap (SSO),
following our previous work (Blanco et al., 2006),
particularized for landmark observations. This
simple but effective measure represents the
information shared by two keyframes. It is
calculated with the relation between the number of
common landmark observations and the total
number of landmarks observed in both keyframes
(see figure 1.a). This is expressed as
B
i
A
i
B
i
A
i
B
i
A
i
BA
vvvv
vv
kfkf ),SSO(
(5)
where v
i
A
and v
i
B
, similarly to the definitions of the
previous section, are binary variables that equal 1 if
landmark i is observed in the keyframes kf
A
and kf
B
,
respectively.
Regarding the criterion for partitioning the
graph, we follow previous works (Zivkovic et al.,
2005; Blanco et al., 2008; Rogers and Christensen,
2009) that apply the minimum normalized-cut (min-
Ncut), originally introduced in (Shi and Malik,
2000). The min-Ncut has the desirable property of
generating balanced clusters of highly
interconnected nodes, in our case clusters of
keyframes that cover the same part of the
environment. Figure 1 illustrates this concept: figure
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
42
1.a shows the common observations in a pair of
keyframes whose arc weight is calculated with the
SSO (see Eq. 5), and figure 1.b shows a map
division into three submaps as produced by the min-
Ncut procedure. Notice that the pairs of keyframes
with higher SSO (thicker arcs) are grouped together.
Figure 1.c shows the symmetrical SSO matrix
corresponding to a different, larger map, where the
keyframes are arranged according the min-Ncut to
give rise to three groups of keyframes or submaps
(matrix blocks).
It is important to notice that, in order to
guarantee a scalable system when applying map
partitioning to visual SLAM, the size of the submaps
(i.e. number of keyframes) must be kept bounded.
This requirement is not demonstrated
mathematically here but it is intuitive to see that as
the camera explores new parts of the scene, the new
keyframes will have low SSO values (if any) with
distant ones in the map. Therefore, the min-NCut
will produce new partitions when the system
explores unobserved regions of the environment.
This can be more clearly understood with the
following example: let’s consider the case where
there are features that are always observed (e.g. the
horizon when travelling by train, or when zooming
in the scene, or traversing a corridor with the camera
pointing in the movement direction) as the new
keyframes are selected, they will introduce new
features and therefore will reduce the minimum
normalized-cut, resulting in the eventual partition of
the map. The last two examples represent another
advantage of our partition method, which produces
natural multi-scale maps when the camera zooms.
This insight is supported by all the experiments we
have carried out during this work.
4 COMBINATION OF MAP
PARTITIONING AND PTAM
This section outlines the combination of our
partition procedure and Parallel Tracking and
Mapping (PTAM) (Klein and Murray, 2007). PTAM
is a monocular SLAM algorithm which performs
online BA on keyframes, separating the tracking and
mapping stages in two different threads to permit
efficient real-time execution. This technique requires
an initial map before it starts working autonomously.
Such initial map is acquired with a Structure from
Motion procedure that involves user intervention to
select two views with sufficient parallax. Once the
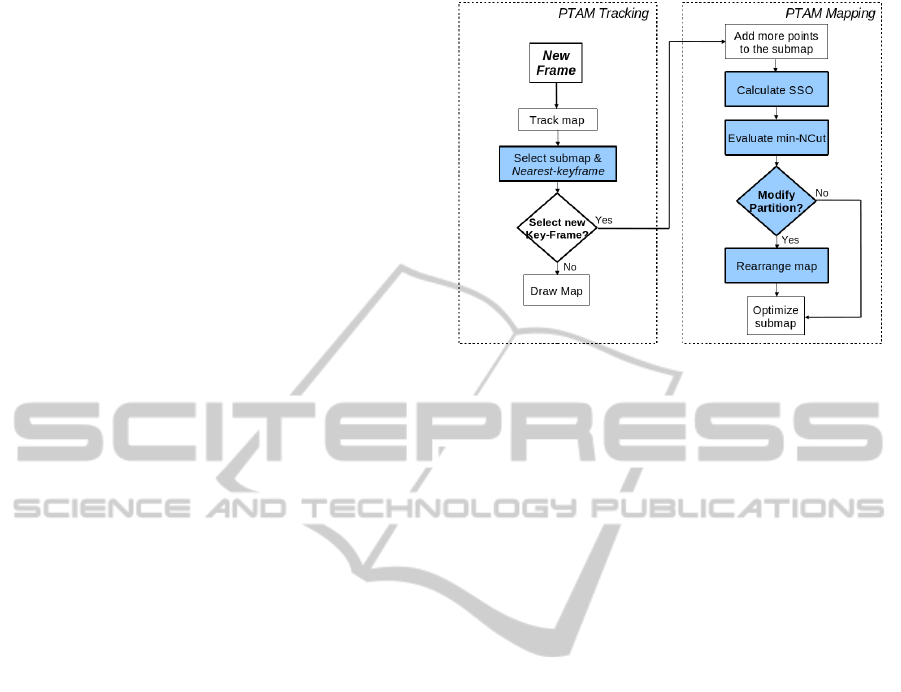
Figure 2: Tracking and mapping threads of PTAM. Blue
boxes correspond to the embedded stages to perform the
map partitioning.
initial map has been created, the system analyses the
images retrieved by the camera to self-localize in the
map, while the map is continuously optimized and
augmented with new keyframes and landmarks.
Such keyframes are selected according to some
simple heuristics (see (Klein and Murray, 2007) for
more details), and new landmarks are extracted
through epipolar search between each new keyframe
and its nearest keyframe in the map.
Figure 2 shows a scheme of the proposed
partitioning method interacting with PTAM. Our
submapping procedure takes action in both of PTAM
threads. In the tracking thread, it selects the current
submap and the nearest keyframe to the estimated
pose after a new image is analyzed. In the mapping
thread, after a new keyframe is selected and new
landmarks are detected in it, the SSO is evaluated
with respect to all the keyframes of the vicinity,
which includes all the submaps directly connected to
the current submap (see figure 3). The partitioning
procedure comes into play after the SSO has been
updated, then, the min-Ncut is evaluated, and if it
results in a different partition, the map is rearranged.
This partitioning method is applied dynamically as
the map enlarges and may create new submaps as
well as merge existing submaps to maintain
coherency by grouping keyframes with high overlap.
The partitioning process, including SSO
computation, min-NCut evaluation and map
rearrangement depends on the number of keyframes
and landmarks in the vicinity, taking up to 100 ms.
in our experiments, which supposes a short time in
comparison with the map optimization time.
CreatingMetric-topologicalMapsforLarge-scaleMonocularSLAM
43
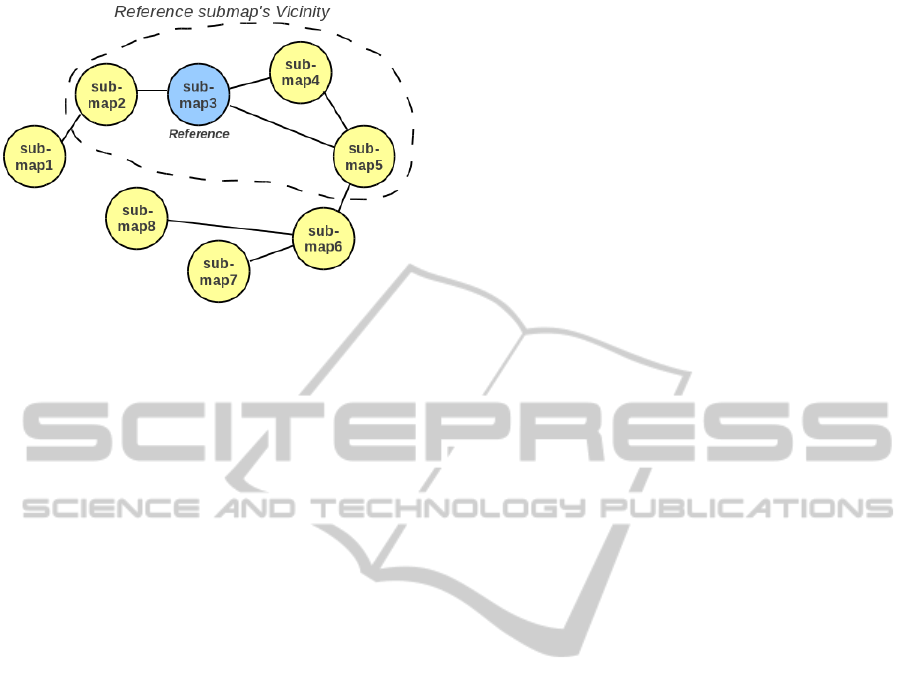
Figure 3: Topological representation of the concept of
submap vicinity.
5 EXPERIMENTAL RESULTS
In this section we present some experiments which
show the advantages, in terms of efficiency and
scalability, of using the proposed metric-topological
arrangement of the map instead of a single metric
map. The experiments have been carried out using a
Philips SPC640NC webcam, connected by USB to a
linux-based laptop with an Intel Core2 Duo 2.4 GHz
processor, 2Gb of memory and a nVidia GeForce-
9400 graphics card.
A first experiment is aimed to illustrate the
increase of efficiency in localization at frame rate.
For that, we compare the time needed to project map
points into the current frame with and without
partitioning as the map grows. Both tests have been
performed in the same environment, building maps
composed of about 45000 points and 1000
keyframes, distributed in 52 submaps for the
partitioning case. Figure 4 shows that the time with a
unique map grows linearly with the number of map
points, whereas with submapping, this time is
bounded since only those points in submaps close to
the camera are evaluated. This improvement in
efficiency becomes more relevant when the map
grows nonstop (note that this process is performed
with each new frame captured by the camera).
The goal of a second experiment is to quantify
the efficiency in the global optimization of the map
with our submapping approximation. For that, we
have run BA offline after every new keyframe is
selected from a recorded video (that is, sequential
SfM), measuring the times of each BA completion
with and without partitioning. At the end of these
tests, the maps created were composed of about
22000 points and 400 keyframes, distributed in 9
submaps for the partitioning case. In order to
compare both alternatives in the same conditions, we
have included the time of partition management in
the BA time for the partitioning test. Figure 5 shows
the optimization times vs. the number of keyframes
of the whole map for both cases. As expected, for
the case without partitioning, the computational cost
follows an increasing polynomial trend with the
number of keyframes. Conversely, when applying
map partitioning, the computational burden is
bounded since the BA is applied only on the current
submap. For this case, we can observe some abrupt
changes in the cost which are produced when the
reference submap (the one where the system is
localized) switches to a neighbor of different size.
Figures 6.a and 6.b show the maps built with both
alternatives (different colors represent different
submaps in 6.b). We can verify visually their high
similarity, and their good alignment, as a result of
the continuous optimization previous to the map
partition.
Additionally, we are interested in comparing the
accuracy of the generated metric map. Due to the
lack of a reliable metric to evaluate the map’s
quality, we have compared visually the different
maps considering as ground truth the map obtained
offline in the previous experiment (figure 6.a),
which is the most accurate we can get. In the map
obtained with PTAM (figure 6.c), we can appreciate
some regions with depth errors and many outliers
(e.g. landmarks detected behind physical walls).
These inconsistencies are consequence of the
premature interruption of global BA that happens
when a new keyframe is selected, what leads to data
association errors and the subsequent accuracy
decrease with the map size. On the contrary, the map
obtained with our approach (figure 6.d) presents no
inconsistencies and considerably less outliers than
the unique map solution (figure 6.c). This results
from the higher efficiency of the submap local
optimization, which optimizes regions with highly
correlated observations to produce locally accurate
submaps.
The results shown in this section have been
supported in several tests performed under different
conditions: exploring different rooms, re-visiting
previous maps, traversing a corridor, zooming to get
more detail of the scene, etc. The reader may refer to
http://mapir.isa.uma.es/eFernández/partition for a
video that illustrates the operation of our
submapping approach with PTAM in different
environments.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
44
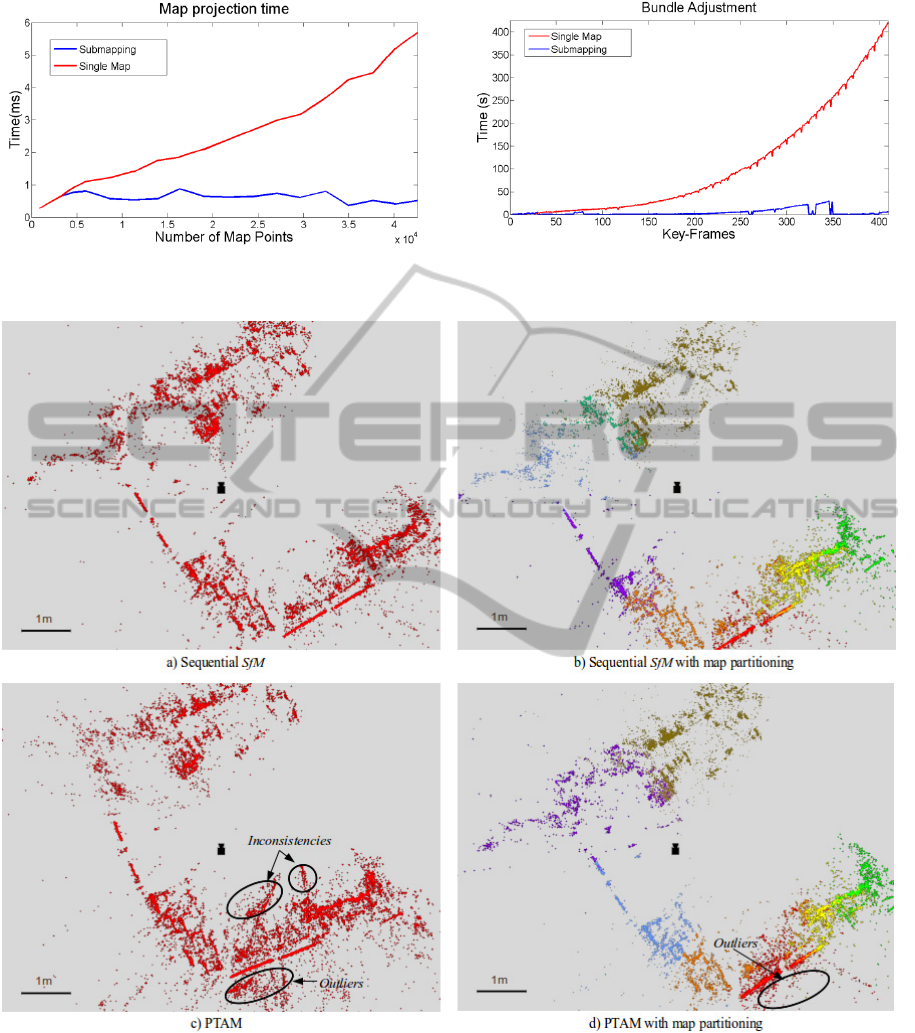
Figure 4: Map projection time for localization with and
without map partitioning.
Figure 5: Bundle adjustment computation time (offline)
with and without partitioning.
Figure 6: Top view of maps generated in our experiments. All the maps are composed of more than 400 keyframes and
22.000 landmarks. The different colors in b) and d) represent different sub-maps.
6 CONCLUSIONS
This article presents an online submapping method
which transforms a metric map into a metric-
topological arrangement of it. This hybrid metric-
topological structure improves the scalability of
monocular SLAM in two aspects: first, the system
rules out unnecessary metric information to perform
more efficiently; second, it permits to use an
CreatingMetric-topologicalMapsforLarge-scaleMonocularSLAM
45

approximation of BA to reduce computational cost
while maintaining map consistency. Besides, the
topological arrangement of the map is useful for
other tasks, as loop closure, global localization or
navigation. Experiments have demonstrated the
potential of our approach to obtain efficient map
representation in large environments. Future work
will focus on exploiting the topological structure of
the map for tasks as loop closure and relocalisation.
ACKNOWLEDGEMENTS
This work has been supported by the project
“TAROTH: New developments toward a robot at
home”, funded by the Spanish Government and the
“European Regional Development Fund ERDF”
under contract DPI2011-25483.
REFERENCES
Angeli, A., Doncieux, S., Meyer, J.-A., Filliat, D., 2009.
"Visual Topological SLAM and Global Localization",
In IEEE International Conference on Robotics and
Automation.
Blanco, J. L., Fernández-Madrigal, J. A., González, J.,
2008. Toward a unified bayesian approach to hybrid
metric-topological SLAM. IEEE Transactions on
Robotics and Automation, 24(2):259-270.
Blanco, J. L., González, J., Fernández-Madrigal, J. A.,
2006. “Consistent observation grouping for generating
metric-topological maps that improves robot
localization”. In IEEE International Conference on
Robotics and Automation, pp. 818–823.
Blanco, J. L., González-Jiménez, J., Fernández-Madrigal,
J. A., 2013. "Sparser Relative Bundle Adjustment
(SRBA): constant-time maintenance and local
optimization of arbitrarily large maps", In IEEE
International Conference on Robotics and
Automation.
Davison, A. J, 2003. “Real-time simultaneous localisation
and mapping with a single camera,” In Proceedings of
the International Conference on Computer Vision.
Eade, E., Drummond, T., 2007. “Monocular slam as a
graph of coalesced observations”. In Proceedings of
the International Conference on Computer Vision.
Estrada, C., Neira, J., Tardos, J., 2005. “Hierarchical slam:
Real-time accurate mapping of large environments”.
IEEE Transactions on Robotics, vol. 21, no. 4, p. 588-
596.
Fernández-Moral, E., Mayol-Cuevas, W., Arévalo, V.,
González-Jiménez, J., 2013. "Fast place recognition
with plane-based maps", In Proceedings of the IEEE
International Conference on Robotics and
Automation.
Galindo, C., Saffiotti, A., Coradeschi, S., Buschka, P.,
Fernández-Madrigal, J. A., J. González, 2005. “Multi-
hierarchical semantic maps for mobile robotics,” In
Proceedings of the IEEE/RSJ International
Conference on Intelligent Robots and Systems, pp.
2278–2283.
Holmes, S. A., Sibley, G., Klein, G., Murray, D. W., 2009.
”A relative frame representation for fixed-time bundle
adjustment in monocular SFM”. In Proceedings IEEE
International Conference on Robotics and
Automation.
Klein, G., Murray, D. W, 2007. “Parallel tracking and
mapping for small AR workspaces”. In Proceedings of
the International Symposium on Mixed and
Augmented Reality.
Konolige, K., 2010. “Sparse sparse bundle adjustment”. In
Proceedings of the British Machine Vision
Conference.
Lim, J., Frahm, J. M., Pollefeys, M., 2011. Online
environment mapping. In Proceedings of the IEEE
Conference on Computer Vision and Pattern
Recognition.
Newman, P., Leonard, J., Soika, M., Feiten, W., Teller, S.,
2003. “An atlas framework for scalable mapping”. In
Proceedings of the IEEE International Conference on
Robotics and Automation, vol. 2, pp. 1899–1906.
Ni, K., Dellaert, F., 2010. “Multi-level submap based slam
using nested dissection”. In
IEEE/RSJ International
Conference on Intelligent Robots and Systems.
Ni, K., Steedly, D., Dellaert, F., 2007. “Tectonic SAM:
Exact, out-of-core, submap-based SLAM,” in IEEE
International Conference on Robotics and
Automation.
Nistér, D., Naroditsky, O., Bergen, J.R, 2005. “Visual
odometry”. In Proc. IEEE International Conference on
Computer Vision and Pattern Recognition, pages 652–
659.
Rogers, J. G., Christensen, H. I., 2009. “Normalized graph
cuts for visual slam”. In IEEE/RSJ International
Conference on Intelligent Robots and Systems.
Savelli, F., Kuipers, B., 2004. “Loop-Closing and
Planarity in Topological Map-Building,” In
Proceedings of the IEEE/RSJ International
Conference on Intelligent Robots and Systems, vol. 2,
pp. 1511–1517.
Segvic, S., Remazeilles, A., Diosi, A. and Chaumette, F.,
2009. "A mapping and localization framework for
scalable appearance-based navigation". Computer
Vision and Image Understanding 113(2): 172-187.
Shi, J., Malik, J., 2000. “Normalized cuts and image
segmentation”. IEEE Transactions on Pattern
Analysis and Machine Intelligence, vol. 22, no. 8, p.
888-905.
Sibley, G., Mei, C., Reid, I., Newman, P., 2009. “Adaptive
relative bundle adjustment”. In Robotics Science and
Systems.
Strasdat, H., Davison, A. J., Montiel, J. M. M., Konolige,
K., 2011. “Double Window Optimisation for Constant
Time Visual SLAM”. In IEEE International
Conference on Computer Vision.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
46

Strasdat, H., Montiel, J. M. M., Davison, A. J., 2010.
“Real-time monocular slam: Why filter?”. In IEEE
International Conference on Robotics and
Automation.
Thrun, S., 1998. “Learning Metric-Topological Maps for
Indoor Mobile Robot Navigation,” Artificial
Intelligence, v.99, no.1, pp. 21-71.
Zivkovic, Z., Bakker, B., Krose, B., 2005. “Hierarchical
map building using visual landmarks and geometric
constraints”. In Proceedings of the IEEE/RSJ
International Conference on Intelligent Robots and
Systems, p. 2480-2485.
CreatingMetric-topologicalMapsforLarge-scaleMonocularSLAM
47
